Embed Size (px)
Citation preview

Intera tively indu ed lo alization in thin-walled I-se tion strutsbu kling about the strong axisElizabeth L. Liu∗, M. Ahmer WadeeDepartment of Civil and Environmental Engineering, Imperial College London,South Kensington Campus, London SW7 2AZ, UKAbstra tA variational model des ribing the behaviour of a thin-walled I-se tion strut su�ering fromlo al�global bu kling mode intera tion is presented where global (Euler) bu kling aboutthe strong axis is the riti al mode. A system of di�erential and integral equations isderived that des ribe the equilibrium states from variational prin iples and are solved nu-meri ally using the ontinuation and bifur ation software Auto-07p for the perfe t ase.Initially stress relieved out-of-straightness imperfe tions are subsequently introdu ed andthe nonlinear response is modelled. The modelled intera tion is between the riti al globalbu kling mode about the strong axis and lo al bu kling in the �ange and web simulta-neously, where the �ange�web joint is assumed to be free to rotate as a rigid body. Theinitial eigenmode is shown to be destabilized at a se ondary bifur ation where intera tivebu kling is triggered. A progressive hange in the bu kling mode is then observed, initiallywith lo al bu kling lo alizing at the mid-span of the ompression �ange, whi h also triggerssympatheti lo al bu kling in the web. The results from the analyti al model have beenvalidated using the ommer ial �nite element (FE) software Abaqus with good ompar-isons presented for the initial post-bu kling behaviour. The strut also exhibits sensitivityto initial out-of-straightness imperfe tions, with a notable de rease in the ultimate loadas the imperfe tion size in reases. The ultimate loads for a range of imperfe tion ampli-tudes are found using both analyti al models and FE analysis, with very good orrelationobserved.1. Introdu tionOpen se tion, thin-walled olumns and struts are well known to be sus eptible to bu k-ling in a variety of di�erent modes. Moreover, where lo al and global instability modeshave similar bu kling loads, the stru ture is known to be sus eptible to exhibiting non-linear modal intera tions [1℄. The intera tive post-bu kling response of these stru tures an introdu e signi� antly less stable behaviour than if either mode were to be triggered
∗Corresponding authorEmail addresses: elizabeth.liu07�imperial.a .uk (Elizabeth L. Liu), a.wadee�imperial.a .uk(M. Ahmer Wadee)Preprint submitted to Stru tures August 28, 2015

independently, potentially redu ing the load arrying apa ity onsiderably. Extensive nu-meri al and experimental studies have been previously ondu ted on thin-walled strutsand olumns, with eviden e of intera tion between global, lo al and distortional modes ofbu kling [2, 3, 4, 5, 6℄. Su h systems have also been shown previously to be sensitive toimperfe tions, whi h an further de rease the load apa ity [7, 8, 9℄. However, sin e thin-walled struts are highly mass-e� ient, with large load apa ity to self-weight ratios, these omponents are used extensively in industry, parti ularly in the ivil, maritime and aero-nauti al engineering se tors [10℄. It is therefore essential that further understanding of thebehaviour of these types of stru tures is developed sin e they o�er signi� ant pra ti al ad-vantages even though they an su�er from omplex and potentially dangerous instabilitiesthat an be ampli�ed by geometri imperfe tions.The urrent work presents an analyti al model of a thin-walled, linear elasti , doublysymmetri I-se tion strut of uniform thi kness under pure ompression. In re ent work [11℄,a similar stru ture was studied where geometries di tated global bu kling about the weakaxis to be the riti al mode, whi h then triggered lo al bu kling in both the �ange and theweb, as is often observed in pra ti e. The urrent study fo uses on the ase where weakaxis bu kling is restrained with global bu kling about the strong axis be oming riti al.This is often seen in appli ations where the system is bra ed in order to in rease the load arrying apa ity by redu ing the bu kling length in the weak axis. The strong axis isoften left unbra ed and thus may be ome riti al. Given the geometri arrangement, thismay naturally push the global and lo al modes of bu kling to be triggered at more similarloading levels. Moreover, with the modern trend of using higher strength materials, inparti ular steels [12, 13℄, elasti behaviour has regained an in reased pra ti al signi� an e.The model is formulated using variational prin iples in onjun tion with the Rayleigh�Ritz method using a series of displa ement fun tions and generalized oordinates resultingin a system of nonlinear ordinary di�erential and integral equations. Initially, the per-fe t ase model is analysed and the equations are solved numeri ally in the ontinuationand bifur ation software Auto-07p [14℄. A strut with identi al material and geometri properties is also analysed in the ommer ial �nite element (FE) software Abaqus [15℄for omparison and validation purposes. The imperfe t ase model is then studied, wherean initial out-of-straightness is introdu ed in the major axis of the strut. The equationsare solved numeri ally in a similar manner and the ultimate loads are ompared to anFE model formulated using the same magnitude and shape of the initial global bu klingde�e tion.For the perfe t strut, it is found that with the sele ted geometries, strong axis globalbu kling is triggered as the initial eigenmode, resulting in a neutrally stable path thatis subsequently destabilized at a se ondary bifur ation point where lo al bu kling in themore ompressed �ange is also triggered. Sin e the �ange�web joints are modelled as beingfree to rotate as a rigid body, sympatheti lo al bu kling is also triggered in the web, aresponse that is known from re ent work on sti�ened plates [8℄. A nonlinear, intera tivepost-bu kling path is observed in the urrent study; behaviour that has also been found inother thin-walled omponents [4, 16, 17℄. The analyti al model shows a good omparisonwith the FE model, parti ularly lose to the point of se ondary instability. The imperfe t2

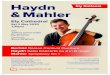
strut response is observed to have a similar post-bu kling path to the perfe t ase; however,it is found to be sensitive to initial out-of-straightness imperfe tions with a de reasingobserved ultimate load as initial de�e tions in rease. It is also found that the ultimateload be omes less sensitive to initial global imperfe tions as they in rease in magnitude.Similar trends and behaviours exhibited in the analyti al model have also been observedin experimental studies [5, 16, 17℄, indi ating that the fundamental physi s of the systemhas been su essfully aptured using the analyti al approa h.2. Analyti al modelThe elevation and ross-se tion of the strut under onsideration are shown in Figure 1.The strut is assumed to be restrained from bu kling globally about the weak axis, whi hL
zy
P
y
x
h
tf
tw
bFigure 1: An I-se tion strut under axial loading P , elevation (left) and ross-se tion (right). The ends aresimply supported and a rigid end plate transfers the load equally to the �anges.is ommonly seen in pra ti e where restraints or bra ing members are utilized to onstrainthe bu kling length thereby preventing global instability in that dire tion. In su h ases,given su� ient bra ing, when instability o urs, it is therefore the relatively unbra edstrong axis global mode that is triggered.The analyti al model formulation begins by de�ning the fun tions used to des ribe theglobal and lo al bu kling shapes. The global mode an be de omposed into two ompo-nents, whi h are de�ned as the `sway' and `tilt' omponents, as used su essfully in previouswork [18, 19℄. The two omponents are shown in Figure 2, the ombination of whi h allowsthe development of shear strains within the ross-se tion, whi h is a feature of Timoshenkobeam theory and has been shown to be a key element for apturing mode intera tion su - essfully in analyti al studies [20℄. In previous work related to the bu kling of I-se tions,it has been assumed that the web is rigid and therefore was assumed not to deform lo allyduring the post-bu kling pro ess [17, 21℄. However, when the strut bu kles globally aboutthe strong axis, in lusion of lo al web bu kling is of paramount importan e for modellingintera tive behaviour in the system sin e it provides the only signi� ant sour e of the terms3

in the governing equations that exhibit an expli it intera tion between the lo al and globalinstability modes. Moreover, if the strut is assumed to be `thin-walled', there would be nosigni� ant through-thi kness shear strains developed within the �anges.The sway and tilt kinemati omponents shown are de�ned as W and θ respe tively:W (z) = qsL sin
(πz
L
)
, θ(z) = qtπ cos(πz
L
)
, (1)where qs and qt are the respe tive generalized oordinates for the sway and tilt modes. Inaddition to the global sway and tilt modes, the initial stress relieved out-of-straightnessimperfe tions, also shown in Figure 2, are introdu ed; the orresponding fun tions W0 andW (z)
y
z
y
z
θ(z)θ0(z)
(stress relieved)
W0(z)(stress relieved)
Figure 2: Global bu kling mode omponents `sway' and `tilt' of the I-se tion strut (W and θ respe tively)under axial ompression with initially stress relieved out-of-straightness imperfe tions orrespondinglyin orporated (W0 and θ0 respe tively).θ0 are written as:
W0(z) = qs0L sin(πz
L
)
, θ0(z) = qt0π cos(πz
L
)
, (2)where qs0 and qt0 are the amplitudes of the global out-of-straightness imperfe tions.There are four lo al bu kling displa ement omponents to be de�ned, the in-planedispla ements ufl and uwl of the �ange and web respe tively, as well as the out-of-planedispla ements wfl and wwl, again of the �ange and web respe tively. The lo al transversede�e tion in the x-dire tion v is assumed to be small and is thus negle ted [22℄. Figure 3shows the lo al bu kling mode de�e tions, whi h are de�ned as:ufl(x, z) = uf(z), uwl(y, z) = −
(y
h
)
uw(z), (3)wfl(x, z) = f(x)wf(z), wwl(y, z) = g(y)ww(z), (4)for the in-plane �ange and web de�e tions and the out-of-plane �ange and web de�e tionsrespe tively. As previously mentioned, Timoshenko beam theory is being used throughout4

y
z
θ(z)
∆L
Neutral axis h
u(z)
Web line
Free edge
Free edge
x
z
wfl
−wfl
b
(a)
(b)
hwwl
(c)−wfl
wfl
y
x
Figure 3: Lo al bu kling mode omponents for in-plane and out-of plane displa ements for the �anges andweb.the urrent formulation, thus for the in-plane modes, a linear fun tion in y and a onstantin x for the web and �ange respe tively are sele ted, su h that they ful�l the onstraint thatplane se tions remain plane while bending. Fun tions f(x) and g(y) de�ne the de�e tedshapes of the �ange in the x-axis and of the web in the y-axis respe tively. The fun tionsf(x) and g(y) are sele ted su h that they satisfy the boundary onditions for ea h separateelement while also giving a good representation of the de�e ted shape of the element.In the urrent work, where strong axis global bu kling is the riti al mode, the �angeunder most ompression an be modelled as being subje t approximately to a uniform ompression a ross its entire breadth, parti ularly before and immediately after globalbu kling is triggered. This an be modelled as a uniformly ompressed re tangular platepinned along its entre-line, whi h has previously resulted in a linear mode shape [23℄.Therefore the mode shape for the �ange f(x) is approximated by a linear fun tion thus:f(x) = −2x/b, whi h is multiplied by the longitudinal fun tion wf(z). This fun tionsatis�es the boundary onditions for the �ange, with zero out-of-plane de�e tion at the�ange�web joint where x = 0, as well as zero moment and shear for e at the free endof the �ange outstand where x = ±b/2. Additionally, the out-of-plane displa ement isnormalized to unity at the �ange outstand. Note that this fun tion di�ers from the f(x)fun tion sele ted for weak axis global bu kling [11℄, where one half of ea h �ange wasin more ompression, with the remaining portion being in less ompression; the previoussituation needing to be modelled using a more sophisti ated expression sin e it has a more omplex stress arrangement. Of ourse, in the advan ed post-bu kling range, this linearfun tion assumption would break down. However, urrent numeri al eviden e from FEpoints to it being an a eptable model, as demonstrated later.The fun tion g(y), whi h des ribes the out-of-plane de�e tion shape of the web is5

assumed to be of the general form:g(y) = g0 sin
(πy
h
)
+ g1 cos(πy
h
)
+ g2
(y
h
)
+ g3, (5)whi h is the general solution for a strut under axial ompression, where onstants g0, g1, g2and g3 are de�ned by the strut boundary onditions [24℄. In the urrent model, there is zeroout-of-plane displa ement at both �ange�web joints, at y = 0 and y = −h. Additionally,sin e the �anges do not bu kle lo ally �rst, there is no rotation at the �ange�web joint forthe portion of the ross-se tion under less ompression at y = 0, and the displa ementsare normalized to unity at the entre of the web (y = −h/2). Thus, the following fourboundary onditions an be applied to solve the four unknown onstants:(i) g(0) = 0, (ii) g′(0) = 0, (iii) g(−h/2) = 1, (iv) g(−h) = 0. (6)The fun tion wwl(y, z) is therefore de�ned thus:wwl(y, z) =
[π
2+
πy
h− sin
(πy
h
)
−π
2cos
(πy
h
)]
ww(z), (7)the fun tion g(y) has the form equivalent to the lassi solution of a ompression strutwith one end pinned and the other �xed [24℄.3. Potential energy formulationThe total potential energy V is the summation of multiple omponent strain energies Uminus the work done by the external loading; ea h omponent is formulated and presented.Firstly, the strain energy stored in bending Ubo due to global bu kling is given by theexpression:Ubo = 2
∫
2
0
EIf
2
(
d2W
dz2−
d2W0
dz2
)2
dz =EIfπ
4
L2
∫ L
0
(qs − qs0)2 sin2
(πz
L
)
dz, (8)where If = bt3f/12, the lo al se ond moment of area of a �ange about its lo al x-axis. Notethat the global bending energy has been multiplied by two to a ount for both top andbottom �anges. The lo al bending energy ontributions from the one �ange that bu kleslo ally Ubf and from the web Ubw are respe tively determined by the expressions:Ubf =
Df
2
∫ L
0
∫ b/2
−b/2
{
(
∂2wfl
∂x2+
∂2wfl
∂z2
)2
− 2(1 − ν)
[
∂2wfl
∂x2
∂2wfl
∂z2−
(
∂2wfl
∂x∂z
)2]}
dx dz,
Ubw =Dw
2
∫ L
0
∫
0
−h
{
(
∂2wwl
∂y2+
∂2wwl
∂z2
)2
− 2(1 − ν)
[
∂2wwl
∂y2
∂2wwl
∂z2−
(
∂2wwl
∂y∂z
)2]}
dy dz,(9)6

where Df = Et3f/[12(1 − ν2)] and Dw = Et3w/[12(1 − ν2)] are the �exural rigidities of the�ange and web plates respe tively. By substituting in the appropriate partial derivativesfor wfl(x, z) and wwl(y, z), the expressions an be written thus:Ubf =
Df
2
∫ L
0
[
{f ′′2}xw2
f + {f 2}xw2
f + 2ν{f ′′f}xwfwf + 2(1 − ν){f ′2}xw2
f
]
dz, (10)Ubw =
Dw
2
∫ L
0
[
{g′′2}yw2
w + {g2}yw2
w + 2ν{g′′g}ywwww + 2(1 − ν){g′2}yw2
w
]
dz, (11)where dots denote di�erentiation with respe t to z and the primes denote di�erentiationwith respe t to x for the fun tion f(x) and with respe t to y for the fun tion g(y). Thebra es with subs ript x denote that a de�nite integration is performed on the fun tionwith respe t to x between the limits x = [−b/2, b/2] and similarly for the bra es withsubs ript y, a de�nite integration is has been performed with respe t to y between thelimits y = [−h, 0]; for example:{f ′′f}x ≡
∫ b/2
−b/2
{[
d2
dx2f(x)
]
f(x)
}
dx, {g′′g}y ≡
∫
0
−h
{[
d2
dy2g(y)
]
g(y)
}
dy. (12)The integrations are performed in the ommer ial omputer algebra software Maple [25℄and are not presented in the fully expli it form for brevity.The membrane energy from dire t strain has ontributions from both �anges and theweb. The ontribution from the �anges an be found using the expression:Uǫf =
1
2Etf
∫ L
0
∫ b/2
−b/2
(
ǫ2
zft + ǫ2
zfc
)
dx dz. (13)The dire t strains for the �anges in less ompression and more ompression respe tivelyare:ǫzft =
∂utt
∂z− ∆,
ǫzfc =∂utc
∂z− ∆ +
∂ufl
∂z+
1
2
(
∂wfl
∂z
)2
. (14)Here, utt = ut(y = 0) for the �ange under less ompression and utc = ut(y = −h) forthe �ange under more ompression during global bu kling, where ut = −[y + h/2](θ − θ0).The fun tion θ is the angle of tilt de�ned earlier and ∆ is the axial strain omponent dueto pure ompression. The remaining two terms, whi h are only present in the expressionfor strain in the more ompressed �ange, are derived from von Kármán plate theory [26℄.Hen e, the ontribution to the total potential energy from dire t strain in the �ange anbe written as:Uǫf =
1
2Etf
∫ L
0
{
(qt − qt0)2h2bπ4
2L2sin2
(πz
L
)
− (qt − qt0)hπ2
L
(
buf +{f 2}x
2w2
f
)
sin
(
πz
2
)7

+ 2b∆2 − 2b∆uf − ∆{f 2}xw2
f + bu2
f + {f 2}xuf w2
f +1
4{f 4}xw
4
f
}
dz. (15)Similarly, the dire t strain energy ontribution to the total potential energy from the webis de�ned by the expression:Uǫw =
1
2Etw
∫ L
0
∫
0
−h
ǫ2
zw dy dz, (16)where the total dire t strain in the web is given by the expression:ǫzw =
∂ut
∂z− ∆ +
∂uwl
∂z+
1
2
(
∂wwl
∂z
)2
. (17)For the web, ut remains the same distribution as de�ned before, uwl and wwl are the in-plane and out-of-plane lo al mode bu kling shapes for the web, also de�ned earlier. Thus,the expression for the dire t strain energy ontribution of the web an be written as:Uǫw =
1
2Etw
∫ L
0
{
(qt − qt0)2h3π4
12L2sin2
(πz
L
)
+ ∆2h +h
3u2
w +1
4{g4}yw
4
w − ∆huw
− (qt − qt0)π2
L
[(
{yg2}y +{g2}yh
2
)
w2
w −h2
6uw
]
sin
(
πz
2
)
− {g2}y∆w2
w −{yg2}y
huww2
w
}
dz. (18)The shear strain energy ontribution from the more ompressed �ange has the expression:Uγf =
1
2Gtf
∫ L
0
∫ b/2
−b/2
γ2
xzdx dz, (19)where the shear strain term γxz is expressed thus:γxz =
∂ufl
∂x+
∂wfl
∂z
∂wfl
∂x. (20)Note that the �rst term is zero sin e the �ange in-plane displa ement is uniform in x.Moreover, there is no shear strain ontribution from the less ompressed �ange sin e it isassumed that there is zero out-of-plane displa ement in this omponent. Thus the �angeshear strain ontribution an be written as:
Uγf =1
2Gtf
∫ L
0
{f ′2f 2}xw2
fw2
f dz. (21)8

The shear strain energy ontribution due to the web deformation is given by the expression:Uγw =
1
2Gtw
∫ L
0
∫
0
−h
γ2
yz dy dz, (22)where the shear strain omponent for the web γyz is de�ned as:γyz =
∂
∂z(W − W0) − (θ − θ0) +
∂uwl
∂y+
∂wwl
∂y
∂wwl
∂z. (23)Note that the �rst two terms are omitted from the shear strain expression for the �angede�ned previously sin e the di�eren e between the qs and qt terms is small due to the �angebeing thin. The shear strain energy ontribution of the web an therefore be written as:
Uγw =1
2Gtw
∫ L
0
{
[(qs − qt) − (qs0 − qt0)]2hπ2 cos2
(πz
L
)
− 2[(qs − qt) − (qs0 − qt0)]π (uw − {g′g}ywwww) cos
(
πz
2
)
+1
hu2
w + {g′2g2}yw2
ww2
w −2
h{g′g}yuwwwww
}
dz. (24)Finally, the expression for the work done by load is expressed as the external load Pmultiplied by the distan e moved in the same dire tion, written as:PE = P
∫ L
0
[
q2
sπ2
2cos2
(πz
L
)
−1
2uw + ∆
]
dz, (25)where the total end-displa ement E is given by respe tive omponents from global bu kling,lo al in-plane web displa ement and pure ompression ∆. The total potential energy Vis given by the sum of all the strain energy terms presented, minus the work done by theload as given thus:V = Ubo + Ubf + Ubw + Uǫf + Uǫw + Uγf + Uγw − PE . (26)3.1. Modelling simpli� ationThe rotation angles between the ompression �ange and the web an be al ulated toleading order by di�erentiating the respe tive shape fun tions and evaluating them at thelo ation of the �ange�web joint. Therefore, with referen e to Figure 4, it an be dedu edthat:
θ1 = θ3 =d
dxf(x)
∣
∣
∣
∣
x=0
wf(z), θ2 =d
dyg(y)
∣
∣
∣
∣
y=−h
ww(z), (27)where θ1 and θ3 are the rotations of the �ange and θ2 of the web at the joint. Sin e thejoint is modelled as being free to rotate as a rigid body and the �ange is approximately9

hwwl
y
x
wfl
wfl
θ1
θ3 θ2Figure 4: Rotations at the �ange�web joint in the more ompressed portion of the ross-se tion; equatingθ1 to θ2 and to θ3 redu es the number of out-of-plane variables in the system to one.under uniform ompression a ross its width, the rotations of the �ange and the web areassumed to be equal at this point, i.e. θ1 = θ3 = θ2. Hen e, the out-of-plane displa ementof the web ww(z) an be related to the out-of-plane displa ement of the �ange wf(z) byequating those rotations:
∂wfl
∂x
∣
∣
∣
∣
∣
x=0
=∂wwl
∂y
∣
∣
∣
∣
∣
y=−h
. (28)This leads to the result:ww(z) = κwf(z), (29)where κ = −h/(πb). This expression an be substituted into the total potential energyformulation and redu es the number of ne essary omputations, with both the �ange andweb displa ements being able to be solved as a single fun tion w, where w ≡ wfl.Additionally, the two in-plane displa ement fun tions ufl and uwl an be expressedas a single displa ement u(z) by equating ufl and uwl at the �ange�web joint to ensure ontinuity. Hen e, a dire t substitution of u an be used for both in-plane displa ementsand resolved simultaneously, further redu ing the omputational expense of solving thisset of equations numeri ally.3.2. Total potential energyThe total potential energy V is re-s aled with respe t to the strut half-length to takea ount of geometri symmetry at z = 2z/L. Similarly, the out-of-plane displa ements w10

and u are re-s aled as 2w/L and 2u/L respe tively [19℄. The total potential energy V anbe written in terms of the re-s aled variables thus:V =
∫
2
0
{
EIfπ4
2L(qs − qs0)
2 sin2
(
πz
2
)
+DfL
4
[
4{f 2}x
L2
˜w2 + 2 (1 − ν) {f ′2}x˜w2
+L2
4{f ′′2}xw
2 + 2ν{f ′′f}x˜ww
]
+DwL
4
[
4{g2}yκ2
L2
˜w2 +L2{g′′2}yκ
2
4w2
+ 2ν{g′′g}yκ2 ˜ww + 2(1 − ν){g′2}yκ
2 ˜w2
]
+EtfL
4
[
bh2π4
2L2(qt − qt0)
2 sin2
(
πz
2
)
+2b∆2 − 2b∆˜u − (qt − qt0)hπ2
L
(
b˜u +{f 2}x
2˜w2
)
sin
(
πz
2
)
− {f 2}x∆ ˜w2 + b˜u2
+{f 2}x˜u ˜w2 +
{f 4}x
4˜w4
]
+EtwL
4
[
h3π4
12L2(qt − qt0)
2 sin2
(
πz
2
)
+ h∆2 +h
3˜u2
+{g4}yκ
4
4˜w4 − h∆˜u +
(qt − qt0)π2
L
(
{yg2}y +h{g2}y
2
)
sin
(
πz
2
)
κ2 ˜w2
−(qt − qt0)h2π2
6Lsin
(
πz
2
)
˜u − {g2}yκ2∆ ˜w2 −
{yg2}yκ2
h˜u ˜w2
]
+GtfL
3
16{f ′2f 2}xw
2 ˜w2 +GtwL
4
[
(qs − qs0 − qt + qt0)2π2h cos2
(
πz
2
)
−(qs − qs0 − qt + qt0)πL(u − {g′g}yκ2w ˜w) cos
(
πz
2
)
−L2{g′g}yκ
2
2huw ˜w
+L2
4hu2 +
L2{g′2g2}yκ4
4w2 ˜w2
]
−PL
2
[
π2q2
s
2cos2
(
πz
2
)
−1
2˜u + ∆
]
}
dz, (30)where dots now denote di�erentiation with respe t to z.4. Governing equationsThe governing equations of equilibrium an be obtained from the total potential energyby performing the al ulus of variations, using a well established pro edure [19℄. Theintegrand of the total potential energy V an be expressed as a Lagrangian thus:V =
∫
2
0
L( ˜w, ˜w, w, ˜u, u, z) dz, (31)with the �rst variation being written as:δV =
∫
2
0
{
∂L
∂ ˜wδ ˜w +
∂L
∂ ˜wδ ˜w +
∂L
∂wδw +
∂L
∂ ˜uδ ˜u +
∂L
∂uδu
}
dz. (32)Equilibrium is de�ned when V is stationary, hen e the �rst variation must vanish for allsmall hanges of w and u. Integration by parts allows the development of the Euler�Lagrange equations for w and u; a fourth order nonlinear ordinary di�erential equation11

(ODE) in w:˜....w +
L2
2η{f 2}x
[
L2{f ′′2}x
8w + ν{f ′′f}x
˜w − (1 − ν){f ′2}x˜w
]
+DwL2κ2
2ηDf{f 2}x
[
L2{g′′2}y
8w
+ν{g′′g}y˜w − (1 − ν){g′2}y
¨w
]
−EtfL
2
8ηDf{f 2}x
{
3{f 4}x˜w2 ˜w − 2{f 2}x∆ ˜w
−(qt − qt0)hπ2{f 2}x
L
[
sin
(
πz
2
)
˜w +π
2cos
(
πz
2
)
˜w
]
+ 2{f 2}x(˜u ˜w + ˜u ˜w)
}
−EtwL2
8ηDf{f 2}x
{(
(qt − qt0)π2(2{yg2}y + {g2}yh)κ2
L
) [
sin
(
πz
2
)
˜w +π
2cos
(
πz
2
)
˜w
]
+3{g4}yκ4 ˜w2 ˜w −
2κ2{yg2}y
h
(
˜u ˜w + ˜u ˜w)
− 2∆κ2{g2}y˜w
}
−GtfL
4
16ηDf{f 2}x{f ′2f 2}x(w
2 ˜w + w ˜w2) +GtwL2
8ηDf{f 2}x
[
L2κ2{g′g}y
2h˜uw
+(qs − qs0 − qt + qt0)Lκ2π2{g′g}y
2sin
(
πz
2
)
w −L2κ4{g′2g2}y
2(w2 ˜w + w ˜w2)
]
= 0,(33)and a se ond order nonlinear ODE in u:˜u −
Gtw2Etfbζ
[
L2
2hu − (qs − qs0 − qt + qt0)Lπ cos
(
πz
2
)
−L2κ2{g′g}y
2hw ˜w
]
(qt − qt0)hπ3
4Lζcos
(
πz
2
)
−tw
2tfbζ
[
(qt − qt0)h2π3
12Lcos
(
πz
2
)
+2κ2{yg2}y
h˜w ˜w
]
+{f 2}x
bζ˜w ˜w = 0, (34)where the parameters η and ζ are de�ned thus:
η = 1 +Dw{g
2}yκ2
Df{f 2}x, ζ = 1 +
twh
3tfb. (35)Again, the terms in bra es represent de�nite integration of the fun tions with respe t tothe subs ript variable between the limits de�ned earlier. The total potential energy V isalso minimized with respe t to the generalized oordinates qs, qt and ∆, resulting in threeintegral equations. In non-dimensional form they are written as:
(qs − qs0)π2 +
GtwL2h
2EIf(qs − qs0 − qt + qt0) −
PL2
2EIfqs
+GtwL3
4EIfπ
∫
2
0
[
κ2{g′g}y˜ww − u
]
cos
(
πz
2
)
dz = 0, (36)12

(qt − qt0)π2
(
1 +twh
6tfb
)
−2GtwL2
Etfbh(qs − qs0 − qt + qt0)
+
∫
2
0
{
twL
tfb
[(
{yg2}y
h2+
{g2}y
2h
)
κ2 ˜w2 −1
6˜u
]
sin
(
πz
2
)
−L
h
(
˜u +{f 2}x
2b˜w2
)
sin
(
πz
2
)
+GtwL3
Etfbh2π
(
u − κ2{g′g}yw ˜w)
cos
(
πz
2
)}
dz = 0, (37)∫
2
0
{
∆
(
1 +twh
2tfb
)
−1
2˜u −
{f 2}x
4b˜w2 −
tw4tfb
(
h˜u + κ2{g2}y˜w2
)
−P
2Etfb
}
dz = 0. (38)Note that by using Equation (37), a relationship an be established between the two globalimperfe tions qs0 and qt0 before any bu kling o urs:qs0 =
[
1 + π2
(
1 +twh
6tfb
) (
Etfbh
2GtwL2
)]
qt0. (39)This relationship an be used in the omputation to redu e the number of initial globalimperfe tion parameters to one. Boundary onditions for w and u are also de�ned to �ndsolutions for the set of equations above. The strut is assumed to have pinned end support onditions at z = 0 and have symmetri displa ements about the mid-span at z = 1. Theboundary onditions an be written thus:w(0) = ˜w(0) = ˜w(1) =
...w(1) = u(1) = 0. (40)An additional end ondition is also imposed at the point of loading, to mat h the in-planestrain:
u
(
1 +twh
3tfb
)
− ∆
(
1 +twh
2tfb
)
+ ˜w2
(
{f 2}x
2b−
tw{yg2}yκ2
2tfbh
)
+P
2Etfb= 0. (41)All boundary onditions arise naturally from minimizing V [19℄. Finally, linear eigenvalueanalysis is used to determine the analyti al expression for the global strong axis bu klingload of the perfe t strut. The Hessian matrix Vij:
Vij =
[
∂2V∂q2
s
∂2V∂qs∂qt
∂2V∂qt∂qs
∂2V∂q2
t
]
, (42)is singular at the global bu kling load PCo , hen e the expression for PC
o an be determinedas:PC
o=
2EIfπ2
L2+
G(twh + 6tfb)
1 + 6tfb/(twh) + 12GL2/(Eπ2h2). (43)This expression redu es to the lassi al Euler bu kling load if the Euler�Bernoulli bendingassumption is imposed, with G → ∞, implying that no shear strains are developed underbending. 13

5. Numeri al results and dis ussionThe system of nonlinear equations is solved using the ontinuation and bifur ationsoftware Auto-07p. The se tion properties sele ted for the numeri al study are detailedin Table 1. In the �rst numeri al example, the perfe t ase strut is analysed, thus, theYoung's Modulus E 210000 N/mm2Poisson's Ratio ν 0.3Length L 4000 mmFlange breadth b 90 mmFlange thi kness tf 2.4 mmWeb thi kness tw 2.4 mmWeb height h 100 mmTable 1: Geometri and material properties of the strut sele ted for the numeri al study.initial out-of-straightness amplitudes qs0 and qt0 are both set to zero.The geometries were sele ted to ensure that the global bu kling load PCo about thestrong axis and the lo al bu kling load PC
l are reasonably lose, su h that mode intera tionis observed within the elasti range, while ensuring that global bu kling remains riti al.For the se tion properties and geometries given in Table 1, the strong axis global bu klingload is al ulated to be 164.4 kN using Equation (43). The lo al bu kling stress of the�ange an be al ulated using the following equation, appli able for long plates:σC
lf =4kpDfπ
2
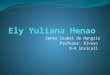
(b − tw)2tf, (44)where kp is the plate bu kling oe� ient for a re tangular simply supported long plate thatis dependent upon the support onditions of the two unloaded edges. The �ange outstandis modelled as a free edge, but the �ange�web joint an be onsidered to lie between a fullypinned and a fully �xed ondition. The value of kp an thus be assumed to lie between 0.43to 1.25, resulting in a lo al bu kling load with a lower bound solution of 164.7 kN and anupper bound solution of 478.7 kN [23℄. However, owing to the rigidly rotating �ange�webjoint, it is postulated that the boundary ondition is loser to being pinned as opposed tothe �xed ondition.An initial al ulation is performed by varying the global sway amplitude qs at thenormalized global bu kling load of p = P/PC = 1. The post-bu kling path has a onstantload, whi h re�e ts the modelling assumption of an initial neutrally stable state. Thissu� es sin e in the a tual situation, the system hara teristi of elasti global instability isweakly stable in the initial post-bu kling range. A series of se ondary bifur ation points arefound on this path, whi h potentially destabilize the system further. The bran h swit hingfun tion in Auto-07p is utilized to �nd the unstable post-bu kling path emanating fromthe �rst se ondary bifur ation point S, as shown in Figure 5. The out-of-plane de�e tion14

0 1 2 3
x 10−3
0
0.2
0.4
0.6
0.8
1
p
ε/L
(a)
0 0.01 0.02 0.03 0.04 0.050
0.2
0.4
0.6
0.8
1
p
qs
(b)
0 0.5 1 1.5 2 2.5
x 10−3
0
0.2
0.4
0.6
0.8
1
p
wmax
/L
(c)
0 0.01 0.02 0.03 0.04 0.05 0.060
0.5
1
1.5
2x 10
−3
wm
ax/L
qs
(d)
SC
SCC S
C,S
Figure 5: Numeri al solutions of equilibrium equations de�ning the post-bu kling paths. Normalized loadp = P/PC
o plotted against (a) the total normalized end shortening E/L, (b) the global sway amplitude qsand ( ) the normalized maximum out-of-plane displa ement of the �ange wmax/L; (d) shows the modalamplitudes wmax/L against qs. Criti al bifur ation points are marked as C and se ondary bifur ationpoints are marked as S.begins to develop beyond S and the load arrying apa ity of the strut qui kly de reasesas the lo al bu kling mode of the �ange and web intera ts with the global mode. Thepost-bu kling path displays a smooth, steady de rease in load, as shown in Figure 5, whi his in ontrast to previous work where a distin tive ellular bu kling response [27℄ with asequen e of snap-ba k instabilities being found for pinned �ange�web joints [8, 17℄.Currently, sin e the �ange�web joint is modelled as being free to rotate as a rigid body,the ellular bu kling pattern found in the pinned examples are eroded and the behaviourbe omes more similar to other studies where a rotational spring was used to model thejoint rigidity [8, 21℄. During the post-bu kling pro ess, it an also be seen that qs and qtare very similar but not equal, at approximately 0.2% di�eren e, indi ating that the shearstrain is small but not negligible within the strut.Figure 6 shows the numeri al solutions of the lo al bu kling mode shapes w and u as15

0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.998w
[m
m]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.98
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.97
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.96
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.94
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.92
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.90
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]
0 500 1000 1500 2000 2500 3000 3500 4000−4
04
p=0.88
w [
mm
]
z [mm]0 500 1000 1500 2000 2500 3000 3500 4000
−202
u [m
m]
z [mm]Figure 6: Numeri al solutions for the out-of-plane de�e tions w and the in-plane de�e tion u of the �angein sequen e, with p de reasing along the unstable equilibrium path from top to bottom.the load redu es down the post-bu kling path. Immediately after the se ondary bifur ationwhere p ≈ 1, the out-of-plane de�e tion modes show a modulated sinusoidal shape whi his more lo alized at, and symmetri al about, the midspan of the strut. With the pathadvan ing, the lo alized pattern spreads progressively towards the ends of the strut with anin reasing amplitude, rea hing approximately 4 mm (≈ 2tf) in the �nal graph of Figure 6,where p = 0.88. The wavelengths of the mode shapes gradually de rease, a hara teristi ofthis type of stru ture that has also been observed in previous theoreti al and experimentalstudies [28, 16℄. The in-plane displa ement in Figure 6, u(z), an be seen to be developingwith the out-of-plane displa ement w(z) in kind. As imposed by the boundary onditions,the displa ement u takes on an antisymmetri shape about the mid-span, where the valueis zero, with the magnitudes being maximum at either end.The solution for the out-of-plane displa ement of the web ww(z) an also be found bymultiplying w(z) by the fa tor κ, as de�ned earlier. The magnitude of κ for the urrent ge-ometry is approximately 0.354. Three dimensional representations plotted using Matlab[29℄ ombining all deformations of the strut at sele ted points in the post-bu kling pro essare shown in Figure 7. 16

(a) (b)
( ) (d)Figure 7: Numeri al solutions from the analyti al model for de�e tions shown in 3D, plotted usingMatlabwith examples shown at (a) p = 1 before the se ondary bifur ation point where only the global bu klingmode exists, (b) p = 0.96, ( ) p = 0.92 and (d) p = 0.88. For (b)�(d) note the distin tive bu klingdeformation in the lower �ange and the web.6. Finite element model and validationThe ommer ial �nite element (FE) pa kage Abaqus is used in the urrent work todevelop a purely numeri al model of the axially ompressed strut with the same geometri and material properties as for the analyti al model. Again, the fo us is on the ase wherethe ross-se tion of the strut is of uniform thi kness and the �ange�web joint is modelledas being free to rotate as a rigid body. A onstraint is applied to the strut in the FE modelsu h that it is restri ted from bu kling about the weak axis.6.1. Model formulationThe quadrilateral four-noded linear shell element (S4R) was sele ted from the Abaquslibrary. The hosen element type allows double urvature whi h an therefore model platebehaviour and has also been shown in the literature to be suitable for problems withgeometri nonlinearities [6℄. Redu ed integration is used to apply hourglass ontrol, thereby17

avoiding unphysi al solutions. The strut is meshed with a uniform element size of 5 mm,both longitudinally and transversely over the entire ross-se tion. The sele ted mesh sizehas demonstrated a su� ient degree of a ura y with relatively a eptable omputational osts. The individual omponents of the strut, i.e. both �anges and the web, are reated inseparate parts, the entreline of both are then tied to the top and bottom edge of the webrespe tively. The `No Rotation' onstraint is imposed to ensure that during post-bu kling,the �anges and the web remain perpendi ular at the interse tions. Only one half of thestrut is modelled, with a symmetri boundary ondition applied at midspan to redu e omputational osts while also mat hing the boundary onditions applied in the analyti alformulation. The loaded edge of the strut is simply supported, and a onstraint is appliedto the bottom edge of the web that restri ts de�e tions in the x-dire tion, thus preventingthe strut from bu kling about the weak axis. The external load is applied as a point for eat the node positioned at the entroid of the ross-se tion.Linear eigenvalue analysis is ondu ted initially to obtain the bu kling loads of thestru ture and the orresponding modes. The analysis veri�es that global bu kling in thestrong axis is the initial eigenmode, triggered at a bu kling load of 166.05 kN, whi h lieswithin 1% of the value stated earlier from the analyti al solution. Simultaneous lo al bu k-ling of both �anges and the web follow the global bu kling mode at 224.90 kN, whi h liesbetween the lower and upper bound values of the theoreti al lo al bu kling load al ulatedearlier for the di�erent long edge boundary onditions. It was postulated in the analyti almodel that the boundary ondition at the �ange�web joint lies between a fully pinned tofully �xed ondition. The FE model e�e tively evaluates a bu kling oe� ient kp of 0.62,indi ating the initial assumption was reasonable and that the boundary ondition at the�ange�web joint is indeed numeri ally loser to that of a pinned joint. Both the initialglobal strong axis mode and the se ondary lo al mode are introdu ed as imperfe tions tothe nonlinear Riks analysis [30℄ of the strut to determine the post-bu kling behaviour. Theimperfe tions are kept to be as small as possible, while still being of su� ient magnitudeto ensure bu kling, su h that the FE model orrelates as best as possible with the analyt-i al model for the perfe t ase. For this reason, in this example the global imperfe tionamplitude for the Riks analysis is set at L/20000 and the lo al imperfe tion size is set attf/150.6.2. ValidationThe results from the FE model are ompared with the numeri al solutions given bythe analyti al model; Figure 8 shows omparisons between the two methods. The lo ationof the se ondary bifur ation point found by both the analyti al and FE methods agreevery well. The total end shortening of the strut at the destabilizing point is found by theFE method to be 5.2 mm, exhibiting less than 1% di�eren e ompared to the analyti almodel. The �gures omparing the applied load against the global de�e tion qs and themaximum out-of-plane de�e tion of the �ange wmax also show good omparisons at thepoint of se ondary bifur ation. In general, the analyti al solution exhibits a sti�er initialresponse than the FE model in all omparisons shown. However, as the post-bu kling18

0 0.02 0.04 0.06 0.080
0.2
0.4
0.6
0.8
1
p
qs
(b)
ANALYTICAL FINITE ELEMENT
0 0.01 0.02 0.03 0.04 0.05 0.060
0.5
1
1.5
2x 10
−3w
max
/L
qs
(d)
0 0.5 1 1.5 2 2.5
x 10−3
0
0.2
0.4
0.6
0.8
1
p
wmax
/L
(c)
0 1 2 3
x 10−3
0
0.2
0.4
0.6
0.8
1
p
ε/L
(a)
Figure 8: Comparisons between the equilibrium paths evaluated from the analyti al and FE models.Graphs show the normalized load p = P/PCo , where PC
o is that from the analyti al model, plotted against(a) the normalized total end shortening E/L, (b) the global sway de�e tion qs and ( ) the maximumnormalized out-of-plane displa ement of the �ange wmax/L; (d) shows wmax/L versus qs.paths advan e, the gradient of the two solutions are more similar, indi ating the sametrend being exhibited in both models in the far �eld post-bu kling range.Figure 9 shows the omparisons between the out-of-plane de�e tion for both the �angeand the web between the analyti al and FE models. In the proximity of the se ondarybifur ation point, where p = 0.998, a very good omparison is observed. The maximumout-of-plane displa ement of the web found by the FE model is approximately 0.345 thatof the �ange. This ratio agrees well with the onstant κ evaluated within the analyti almodel, whi h sets the ratio of out-of-plane de�e tions between the web and �ange at 0.354,a di�eren e of less than 4%. The maximum out-of-plane displa ement at midspan is largerin the FE model than in the analyti al model, as expe ted, due to the in lusion of initialimperfe tions within the FE model. As the post-bu kling path progresses and de�e tions19

0 500 1000 1500 2000 2500 3000 3500 4000−4−2
024
z [mm]
wf(z
) [m
m]
p=0.998
0 500 1000 1500 2000 2500 3000 3500 4000−4−2
024
z [mm]
wf(z
) [m
m]
p=0.99
0 500 1000 1500 2000 2500 3000 3500 4000−4−2
024
z [mm]
wf(z
) [m
m]
p=0.95
ANALYTICAL FINITE ELEMENT
0 500 1000 1500 2000 2500 3000 3500 4000−4−2
024
z [mm]
wf(z
) [m
m]
p=0.90
(a)0 500 1000 1500 2000 2500 3000 3500 4000
−2
0
2
z [mm]
ww
(z)
[mm
]
p=0.998
0 500 1000 1500 2000 2500 3000 3500 4000−2
0
2
z [mm]
ww
(z)
[mm
]
p=0.99
0 500 1000 1500 2000 2500 3000 3500 4000−2
0
2
z [mm]
ww
(z)
[mm
]
p=0.95
0 500 1000 1500 2000 2500 3000 3500 4000−2
0
2
z [mm]
ww
(z)
[mm
]
p=0.90
ANALYTICAL FINITE ELEMENT
(b)Figure 9: Comparisons of the development of out-of-plane displa ements in the (a) �ange wf and (b) webww, between the numeri al solutions from the analyti al model (solid line) and the FE model (dot-dashedline). 20

be ome larger, the in�uen e of the initial imperfe tion be omes less signi� ant and thedi�eren e between the maximum out-of-plane de�e tions at midspan between the FE andthe analyti al models redu es from approximately 38% in the initial plot (although bothbeing very small) to 8% in the �nal plot shown in Figure 9(a). A signi� ant redu tion in thewavelengths is observed in the analyti al model, making the post-bu kling response sti�erwhile the wavelengths in the FE model are hanging at a mu h slower rate. The signi� ant hange in wavelength throughout the post-bu kling pro ess is a phenomenon that hasbeen observed in experiments for similar stru tural omponents [5, 16, 17℄. Additionally, ithas been demonstrated in previous work that stati FE programs have struggled to modelphenomena su h as these signi� antly hanging wavelengths su essfully, parti ularly whenusing the standard method of introdu ing imperfe tions a�ne to linear eigenmodes intosubsequent Riks analyses [6, 17℄. Thus, it may be postulated that the analyti al modelgives a more a urate representation of the physi al behaviour of this type of system.Indeed, it was shown in [17℄ that the urrent approa h ompared with experiments mu hbetter and FE results, although safe, were quite onservative. A series of three dimensionalrepresentations depi ting the de�e ted shapes of the strut are shown in Figure 10 for boththe analyti al and FE models for visual omparison.The fun tions f(x) and g(y), hosen to de�ne the out-of-plane de�e tion shapes of boththe web and the �ange in the analyti al model, are also ompared to the de�e tion shapesof the ross-se tion obtained numeri ally using FE analysis. A favourable omparisonis exhibited between the mode shapes within the ross-se tion, as shown in Figure 11.However, on loser inspe tion, the following may be observed: the more ompressed �angeis not pre isely straight and hen e the angles de�ned in Figure 4 (i.e. θ1, θ2 and θ3) arenot pre isely equal, as eviden ed by the result from Abaqus for the s aling parameter κ.This implies that the results from the analyti al model would be sti�er than those fromFE, as indeed is the ase. Note that the top �ange is assumed to be in less ompressionthroughout the post-bu kling pro ess and is therefore modelled to have zero lo al de�e tion.On omparing this with the FE model, it is observed that this assumption was justi�edsin e very little lo al de�e tion is present in the less ompressed top �ange, when omparedto the more ompressed bottom �ange. Note also that the out-of-plane de�e tions for boththe analyti al and FE models in Figure 11 have been s aled by a fa tor of 20 for larity.7. Sensitivity to initial out-of-straightnessThe sensitivity of the strut to initial out-of-straightness imperfe tions is analysed byintrodu ing the parameters W0 and θ0 into the analyti al model with non-zero values. Astrut of identi al geometri and material properties as in �5 is used. A range of initialout-of-straightness amplitudes are introdu ed, the aim of whi h is to investigate the e�e tson the load arrying apa ity and post-bu kling response.7.1. Numeri al examples and resultsThe normalized initial out-of-straightness amplitudes qs0 are varied for ea h exampleand range from 1/10000 to 1/200. The equilibrium equations are solved in a similar manner21

(a) (b)
( ) (d)
(e) (f)Figure 10: Visual omparisons of the analyti al model and FE solutions with 3D representations. Theresults are shown for the post-bu kling equilibrium states with global bu kling amplitudes: qsL = 36 mm,60 mm and 122 mm from the top to the bottom row respe tively. The left olumn shows results from theanalyti al model (dimensions in mm) and the right olumn from the FE model formulated in Abaqus.22

−50 0 50−150
−100
−50
0
[mm]
[mm
] reducingp
Figure 11: Comparison of the de�e ted ross-se tion shapes hosen for the out-of-plane displa ements inthe analyti al model (solid line) with the ross-se tional de�e tions extra ted from the FE model (dashedline), at load levels p = 0.98, 0.94 and 0.90 with in reasing displa ement amplitudes. The less ompressedtop �ange remains straight throughout the post-bu kling pro ess in both models.as for the perfe t ase strut using the software Auto-07p.Figure 12 shows a family of urves of the equilibrium paths of the I-se tion strut, withea h urve orresponding to a di�erent imperfe tion size. It an be observed that thenormalized ultimate load pu = Pu/PC
o de reases as the size of the imperfe tion in reases.Note also that a global imperfe tion auses a noti eable de rease in the ultimate load; at aglobal imperfe tion of qs0 = 1/200, the ultimate load de reases approximately by 20%. It an be on luded that the system is sensitive to initial global imperfe tions. Additionally,on analysing the post-bu kling paths, it is revealed that the system onverges to the sameequilibrium state asymptoti ally for all magnitudes of qs0, indi ating that any large initialglobal imperfe tion would result in an approximately neutrally stable path in the post-bu kling range. The mode shapes for the out-of-plane de�e tion of both the web and the�ange are similar to that of the perfe t ase.7.2. Comparisons with FEThe FE model that was used to validate the perfe t ase strut is also used to �nd theultimate load of the imperfe t strut by using di�erent s alings of global imperfe tions inthe analysis. In the previous se tion, both global and lo al imperfe tions were set to benominal values in order to a hieve better orrelation with the perfe t analyti al strut model.In the same way, the global imperfe tion an be in reased to mat h the amplitudes of the23

0 5 10 15
x 10−3
0
0.2
0.4
0.6
0.8
1
ε/L
p
(a)
0 0.02 0.04 0.060
0.2
0.4
0.6
0.8
1
qs
p
(b)
0 0.5 1 1.5 2 2.5
x 10−3
0
0.2
0.4
0.6
0.8
1
wmax
/L
p
(c)
0 0.02 0.04 0.06 0.080
0.5
1
1.5
2
2.5x 10
−3
qs
wm
ax/L
(d)
qs0 increasing
qs0 increasing q
s0 increasing
qs0 increasing
Figure 12: Numeri al solutions of the governing equations de�ning the equilibrium paths for in reasingglobal imperfe tions W0. The graphs show the normalized load p against (a) total normalized end short-ening E/L, (b) global sway amplitude qs and ( ) maximum normalized out-of-plane displa ement of the�ange wmax/L; (d) shows wmax/L against qs. The perfe t ase is marked with a dot-dashed line and allimperfe t ases have solid lines.sele ted qs0 values. The ultimate loads found by the FE model for ea h sele ted globalout-of-straightness amplitude are shown in Table 2 along with the per entage di�eren e.The ultimate loads from both analyti al and FE solutions are also plotted in Figure 13.It is observed that the ultimate loads found by both the analyti al model and the FEmodel orrelate well, parti ularly for relatively small initial imperfe tions. Even at rela-tively large imperfe tions of L/400, whi h for the urrent ase is an amplitude of 10 mm,the per entage di�eren e in ultimate load is relatively low at only 5.4%. As the imperfe -tions grow larger, the results of the FE model begins to drift from the analyti al solutions,with the FE model exhibiting a lower ultimate load response as would be expe ted giventhe results from the perfe t ase. The di�eren e in post-bu kling sti�ness between thetwo models ould be attributed to the analyti al model having a more rapidly de reasingwavelength in the out-of-plane de�e tion pro�le, ausing the entire system to give a sti�er24

0 0.5 1 1.5 2 2.5 3
x 10−3
0.75
0.8
0.85
0.9
0.95
1
1.05
qs0
p u
ANALYTICAL FE
Figure 13: Normalized ultimate load pu plotted against the global imperfe tion amplitude qs0, for bothanalyti al and FE models. Squares and ir les represent the analyti al model and the FE model respe -tively.
qs0 0 1/10000 1/1500 1/750 1/400 1/350
pu [kN℄ (Analyti al) 1.000 0.989 0.928 0.881 0.836 0.828
pu [kN℄ (FE) 1.010 0.997 0.923 0.865 0.793 0.777
% di�eren e < 1% < 1% < 1% 1.8% 5.4% 6.6%Table 2: Ultimate loads obtained with the analyti al and FE models orresponding to ea h initial globalimperfe tion qs0 and the per entage di�eren e between the two methods.25

response as the post-bu kling path progresses. This is owing to the greater strain energystored in a plate with a smaller bu kling wavelength for a given amplitude. Additionally,the analyti al model is, in general, more onstrained due to the out-of-plane and in-planedispla ements having pres ribed mode shapes, whi h implies that the solution is only alo al as opposed to a global energy minimizer.8. Con luding remarksA nonlinear analyti al model has been formulated to analyse the nonlinear intera tionbetween strong axis global bu kling with lo al �ange and web bu kling of a thin-walledI-se tion strut under pure ompression. The �ange�web joint is onsidered to be free torotate as a rigid body and the strut is assumed to be bra ed su h that it is not permittedto bu kle about its weak axis. The model predi ts strong axis global bu kling o urringinitially, whi h then intera ts with lo al bu kling of the �ange and web after a se ondarybifur ation point is triggered. The lo al bu kling of the �ange shows a ontinuously spread-ing sinusoidal pattern that is lo alized at midspan initially and is modulated towards theends of the strut. The bu kling pro�le in reases in amplitude with de reasing wavelengthsas the post-bu kling path progresses and the load apa ity de reases signi� antly.The numeri al solutions from the analyti al model are validated using ommer ial FEsoftware. The bu kling loads, points of se ondary destabilization and the initial intera tivebu kling pro�les all show very good agreement between the two models. Although thereis subsequent divergen e, there is experimental eviden e demonstrating that this is on-ne ted more with the di� ulties experien ed by FE models in tra king progressively andsigni� antly hanging lo al bu kling pro�les, rather than with an intrinsi weakness of theanalyti al model.The analyti al model is also applied to the ase where initial imperfe tions are present.The equilibrium paths for a range of global out-of-straightness amplitudes are determinedand the system exhibits signi� ant sensitivity to these imperfe tions. It is found thatall imperfe t paths onverge to the same equilibrium state asymptoti ally indi ating thatany large initial global imperfe tion would result in an approximately neutrally stablepost-bu kling path. The ultimate loads for ea h imperfe tion amplitude were also foundusing FE methods and a good orrelation was observed when ompared with the analyti alresults.Further work is urrently being ondu ted to in orporate lo al geometri imperfe tionsinto the analyti al model su h that it an be solved for more realisti situations and soglobal and lo al geometri imperfe tions may be ombined. It would also be desirable toin orporate the less ompressed �ange into the analyti al model using a separate set ofdispla ement fun tions sin e this would allow the strut to be modelled under the onditionwhere the lo al mode, as opposed to the global mode, was riti al. Nevertheless, the urrent work represents a sound foundation from whi h these developments an be made.26

A knowledgementThe lead author was supported by the UK Engineering and Physi al S ien es Resear hCoun il through the Do toral Training Grant s heme.Referen es[1℄ J. M. T. Thompson, G. W. Hunt, A general theory of elasti stability, John Wileyand Sons Ltd, London, UK, 1973.[2℄ A. Van der Neut, The intera tion of lo al bu kling and olumn failure of thin-walled ompression members, in: M. Hetenyi, W. G. Vin enti (Eds.), Pro eedings of the 12thInternational Congress of Applied Me hani s, 1969, pp. 389�399.[3℄ G. J. Han o k, Intera tive bu kling in I-se tion olumns, ASCE Journal of the Stru -tural Division 107 (1) (1981) 165�179.[4℄ B. W. S hafer, Lo al, distortional, and Euler bu kling of thin-walled olumns, Journalof Stru tural Engineering 128 (3) (2002) 289�299.[5℄ J. Be que, K. J. R. Rasmussen, Experimental investigation of the intera tion of lo aland overall bu kling of stainless steel I- olumns, ASCE Journal of Stru tural Engi-neering 135 (11) (2009a) 1349�1356.[6℄ J. Be que, K. J. R. Rasmussen, Numeri al investigation of the intera tion of lo al andoverall bu kling of stainless steel I- olumns, ASCE Journal of Stru tural Engineering135 (11) (2009b) 1340�1348.[7℄ A. van der Neut, The sensitivity of thin-walled ompression members to olumn axisimperfe tions, International Journal of Solids and Stru tures 9 (1973) 999�1011.[8℄ M. A. Wadee, M. Farsi, Lo al-global mode intera tion in stringer-sti�ened plates,Thin-Walled Stru tures 85 (2014) 419�430.[9℄ M. A. Wadee, M. Farsi, Imperfe tion sensitivity and geometri e�e ts in sti�enedplates sus eptible to ellular bu kling, Stru tures 3 (2015) 172�186.[10℄ J. Loughlan, Thin-Walled Stru tures: Advan es in Resear h, Design and Manufa tur-ing Te hnology, Taylor and Fran is, London, UK, 2004.[11℄ E. L. Liu, M. A. Wadee, Mode intera tion of global and lo al bu kling in thin-walledI-se tion struts with rigid �ange�web joints, in: D. Camotim, P. B. Dinis, S. L. Chan,C. M. Wang, R. Gonçalves, N. Silverstre, C. Basaglia, A. Landesmann, R. Bebiano(Eds.), Pro eedings of ICASS 2015, 2015, paper number: 42.[12℄ C. Miki, K. Homma, T. Tominaga, High strength and high performan e steels andtheir use in bridge stru tures, Journal of Constru tional Steel Resear h 58 (1) (2002)3�20. 27

[13℄ R. Bjorhovde, Development and use of high performan e steel, Journal of Constru -tional Steel Resear h 60 (3�5) (2004) 393�400.[14℄ E. J. Doedel, B. E. Oldeman, AUTO-07P: Continuation and Bifur ation Software forOrdinary Di�erential Equations, Con ordia University, Montreal, Canada, 2011.[15℄ ABAQUS, Version 6.10, Dassault Systèmes, Providen e RI, 2011.[16℄ M. A. Wadee, L. Gardner, Cellular bu kling from mode intera tion in I-beams underuniform bending, Pro eedings of the Royal So iety A 468 (2137) (2012) 245�268.[17℄ M. A. Wadee, L. Bai, Cellular bu kling in I-se tion struts, Thin-Walled Stru tures 81(2014) 89�100.[18℄ G. W. Hunt, L. S. Da Silva, G. M. E. Manzo hi, Intera tive bu kling in sandwi hstru tures, Pro eedings of The Royal So iety A 417 (1852) (1988) 155�177.[19℄ G. W. Hunt, M. A. Wadee, Lo alization and mode intera tion in sandwi h stru tures,Pro eedings of The Royal So iety A 454 (1972) (1998) 1197�1216.[20℄ M. A. Wadee, S. Yiatros, M. Theofanous, Comparative studies of lo alized bu klingin sandwi h struts with di�erent ore bending models, International Journal of Non-Linear Me hani s 45 (2) (2010) 111�120.[21℄ L. Bai, M. A. Wadee, Mode intera tion in thin-walled I-se tion struts with semi-rigid�ange-web joints, International Journal of Non-Linear Me hani s 69 (2015) 71�83.[22℄ W. T. Koiter, M. Pignataro, An alternative approa h to the intera tion between lo aland overall bu kling in sti�ened panels, in: B. Budiansky (Ed.), Bu kling of stru tures,International Union of Theoreti al and Applied Me hani s, Springer Berlin Heidelberg,1976, pp. 133�148.[23℄ P. S. Bulson, The stability of �at plates, Chatto & Windus, London, UK, 1970.[24℄ S. P. Timoshenko, J. M. Gere, Theory of elasti stability, M Graw�Hill book ompany,New York, USA, 1961.[25℄ M. B. Monagan, K. O. Geddes, M. H. Heal, G. Labahn, S. M. Vorkoetter, J. M Carron,P. DeMar o, Maple 10 Programming Guide, Maplesoft, Waterloo ON, Canada, 2005.[26℄ S. Timoshenko, S. Woinowsky-Krieger, Theory of plates and shells, M Graw�Hill BookCompany, USA, 1959.[27℄ G. W. Hunt, M. A. Peletier, A. R. Champneys, P. D. Woods, M. A. Wadee, C. J.Budd, G. J. Lord, Cellular bu kling in long stru tures, Nonlinear Dynami s 21 (1)(2000) 3�29. 28

[28℄ J. Be que, The intera tion of lo al and overall bu kling of old-formed stainless steel olumns, Ph.D. thesis, University of Sydney, Sydney, Australia (September 2008).[29℄ MATLAB, version 7.10.0 (R2012a), The MathWorks In ., Nati k, Massa husetts,2010.[30℄ E. Riks, An in remental approa h to the solution of snapping and bu kling problems,International Journal of Solids and Stru tures 15 (7) (1979) 529�551.
29