Embed Size (px)
Citation preview
L. Vandenberghe EE236C (Spring 2013-14)
Ellipsoid method
• ellipsoid method
• convergence proof
• inequality constraints
1
Ellipsoid method
history
• developed by Shor, Nemirovski, Yudin in 1970s
• used in 1979 by Khachian to show polynomial solvability of LPs
properties
• each step requires cutting-plane or subgradient evaluation
• modest storage (O(n2))
• modest computation per step (O(n2)), via analytical formula
• extremely simple to implement
• efficient in theory
• slow but steady in practice; rarely used
Ellipsoid method 2
Motivation
drawbacks of cutting-plane methods
• serious computation needed to find next query point
typically, O(n2m) for analytic centering in ACCPM, with m inequalities
• localization polyhedron grows in complexity as algorithm progresses
(with pruning, can keep m proportional to n, e.g., m = 4n)
ellipsoid method addresses both issues, but retains theoretical efficiency
Ellipsoid method 3
Ellipsoid algorithm for minimizing convex function
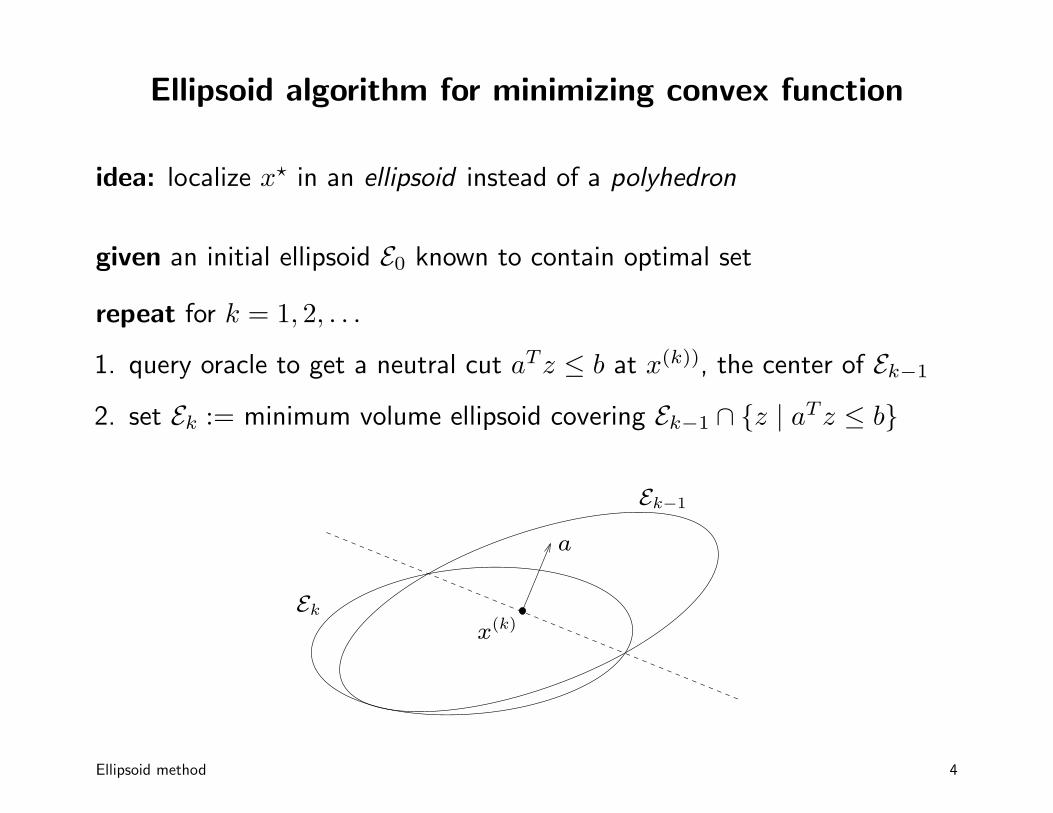
idea: localize x⋆ in an ellipsoid instead of a polyhedron
given an initial ellipsoid E0 known to contain optimal set
repeat for k = 1, 2, . . .
1. query oracle to get a neutral cut aTz ≤ b at x(k)), the center of Ek−1
2. set Ek := minimum volume ellipsoid covering Ek−1 ∩ {z | aTz ≤ b}
Ek−1
x(k)
a
Ek
Ellipsoid method 4
differences with cutting-plane methods
• localization set doesn’t grow more complicated
• generating query point is trivial
• but, we add unnecessary points in step 2
interpretation
• reduces to bisection for n = 1
• can be viewed as an implementable version of the center-of-gravitycutting-plane method
Ellipsoid method 5
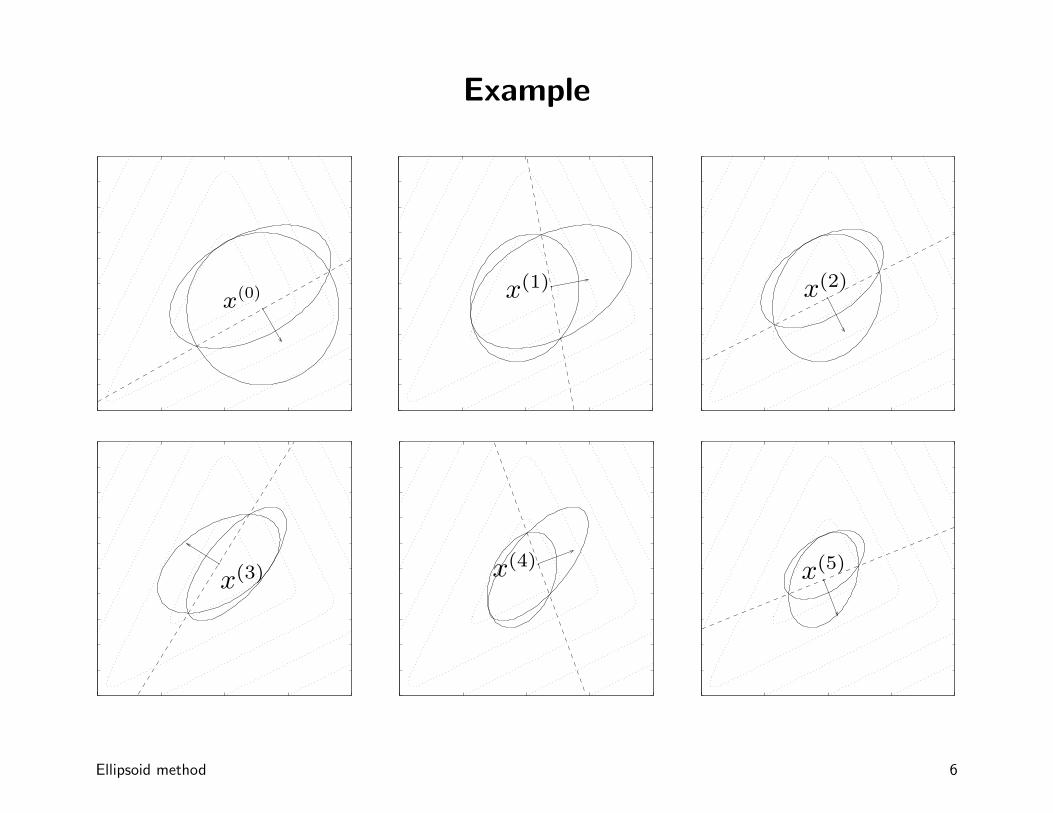
Example
♣x(0)♣x(1)
♣x(2)
♣
x(3)♣x(4)
♣x(5)
Ellipsoid method 6
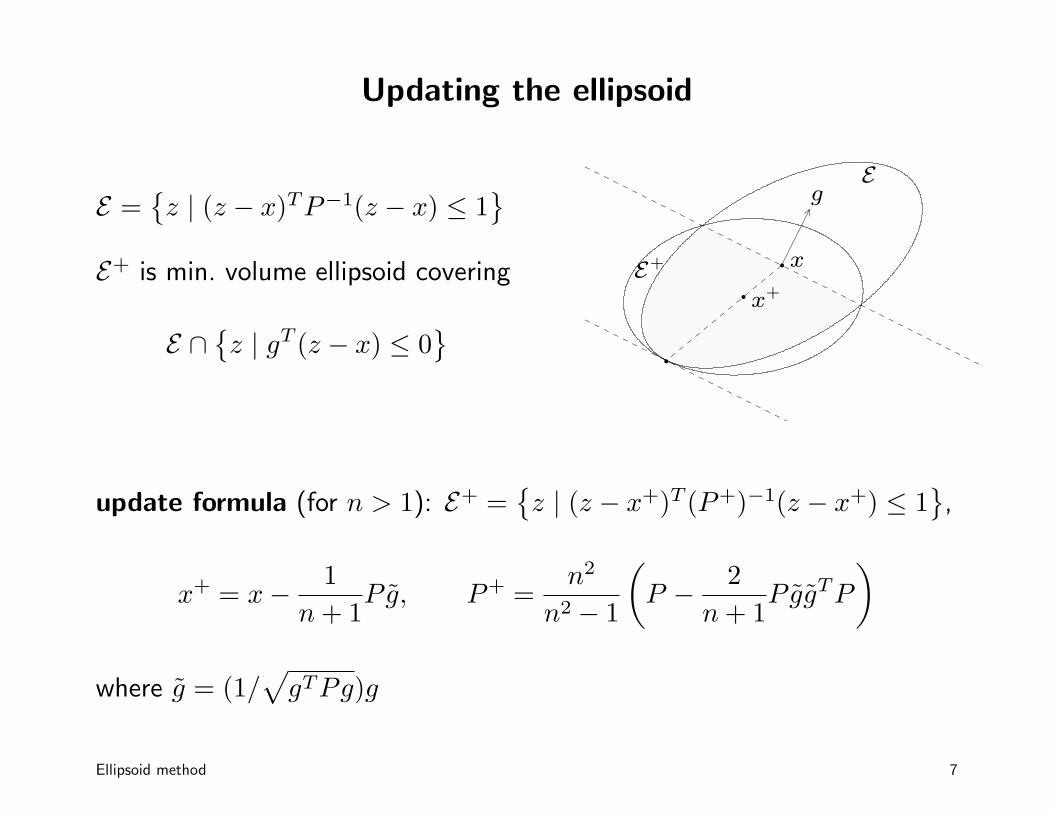
Updating the ellipsoid
E ={
z | (z − x)TP−1(z − x) ≤ 1}
E+ is min. volume ellipsoid covering
E ∩{
z | gT (z − x) ≤ 0}
rx
rx+
r
E
E+
g
update formula (for n > 1): E+ ={
z | (z − x+)T (P+)−1(z − x+) ≤ 1}
,
x+ = x−1
n+ 1P g̃, P+ =
n2
n2 − 1
(
P −2
n+ 1P g̃g̃TP
)
where g̃ = (1/√
gTPg)g
Ellipsoid method 7
Simple stopping criterion
for unconstrained problem of minimizing f(x)
lower bound on optimal value
f(x⋆) ≥ f(x(k)) + g(k)T (x⋆ − x(k))
≥ f(x(k)) + infz∈Ek−1
g(k)T (z − x(k))
= f(x(k))−√
g(k)TP (k−1)g(k)
second inequality holds since x⋆ ∈ Ek−1
simple stopping criterion to guarantee f(x(k))− f(x⋆) ≤ ǫ:
√
g(k)TP (k−1)g(k) ≤ ǫ
Ellipsoid method 8
Basic ellipsoid algorithm
ellipsoid described as
E(x, P ) = {z | (z − x)TP−1(z − x) ≤ 1}
given ellipsoid E(x, P ) containing x⋆, accuracy ǫ > 0
repeat
1. evaluate g ∈ ∂f(x)
2. if√
gTPg ≤ ǫ, return x; else, update ellipsoid
x := x−1
n+ 1P g̃, P :=
n2
n2 − 1
(
P −2
n+ 1P g̃g̃TP
)
where g̃ = (1/√
gTPg)g
Ellipsoid method 9
Interpretation
• change coordinatesz̃ = P−1/2z
so uncertainty is isotropic (same in all directions), i.e., E is unit ball
• take subgradient step with fixed length 1/(n+ 1)
Shor calls ellipsoid method ‘gradient method with space dilation indirection of gradient’
Ellipsoid method 10
Improvements
• keep track of best upper and lower bounds:
f(k)best = min
i=1,...,kf(x(i))
l(k)best = max
i=1,...,k
(
f(x(i))−√
g(i)TP (i−1)g(i))
stop when f(k)best − l
(k)best ≤ ǫ
• propagate Cholesky factor of P (improves numerical stability)
Ellipsoid method 11
Proof of convergence
assumptions: we consider the unconstrained problem
minimize f(x)
• f is Lipschitz: |f(y)− f(x)| ≤ G‖y − x‖2
• {x | f(x) ≤ f⋆ + ǫ} ⊆ E0
• E0 is ball with radius R
reduction of volume: can show that
vol Ek+1 < e−12n vol Ek
(reduction factor degrades rapidly with n, compared to CG or MVEcutting-plane methods)
Ellipsoid method 12
proof. suppose f(x(i)) > f⋆ + ǫ, i = 1, . . . , k
• at iteration i we only discard points with f(z) ≥ f(x(i)); therefore
{z | f(z) ≤ f⋆ + ǫ} ⊆ Ek
• from Lipschitz condition, ‖z − x⋆‖2 ≤ ǫ/G implies f(z) ≤ f⋆ + ǫ; hence
B = {z | ‖z − x⋆‖2 ≤ ǫ/G} ⊆ Ek
• therefore volB ≤ vol Ek, so
αn(ǫ/G)n ≤ e−k2n vol E0 = e−
k2nαnR
n
(αn is volume of unit ball in Rn)
• this givesk ≤ 2n2 log(RG/ǫ)
Ellipsoid method 13
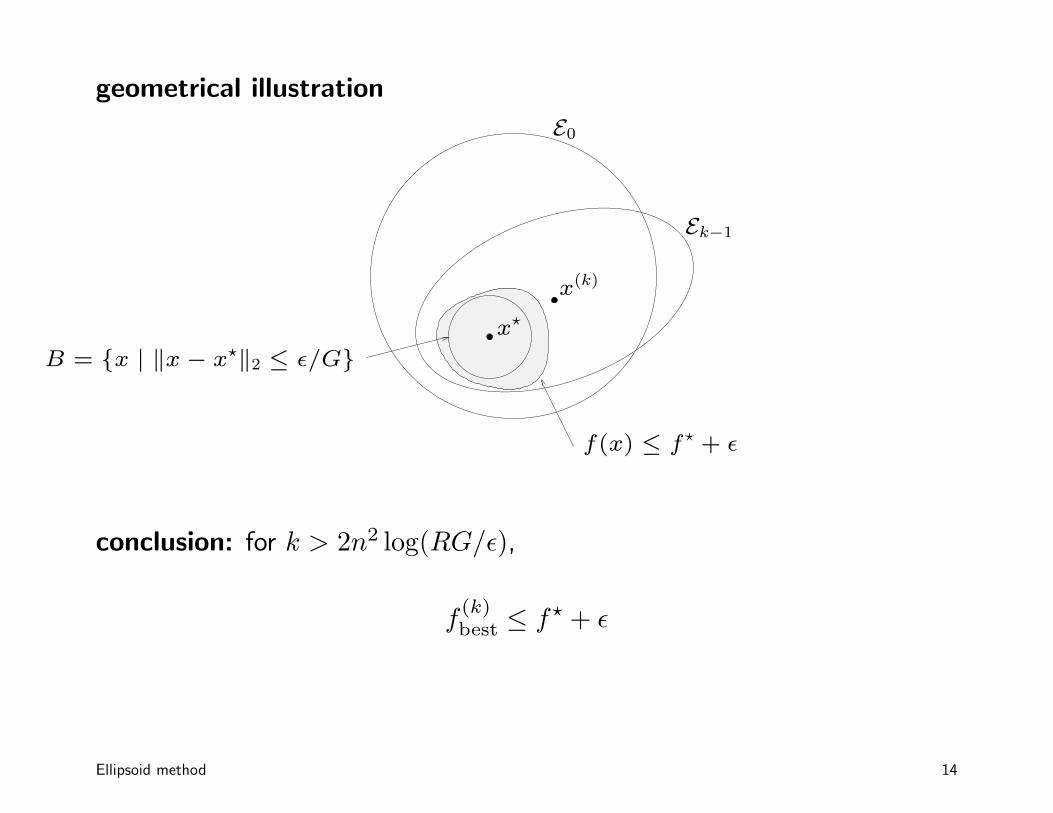
geometrical illustration
E0
Ek−1
x(k)
f(x) ≤ f⋆ + ǫ
B = {x | ‖x − x⋆‖2 ≤ ǫ/G}
x⋆
conclusion: for k > 2n2 log(RG/ǫ),
f(k)best ≤ f⋆ + ǫ
Ellipsoid method 14
Interpretation of complexity
• since x⋆ ∈ E0 = {x | ‖x− x(1)‖2 ≤ R}, our prior knowledge of f⋆ is
f(x(1))−GR ≤ f⋆ ≤ f(x(1))
our prior uncertainty in f⋆ is GR
• after k iterations our knowledge of f⋆ is
f(k)best − ǫ ≤ f⋆ ≤ f
(k)best
posterior uncertainty in f⋆ is ≤ ǫ
• iterations required:
2n2 logRG
ǫ=
2n2 log2(RG/ǫ)
log2 e= 1.39n2 log2
prior uncertainty
posterior uncertainty
efficiency: 1/(1.39n2) = 0.72/n2 bits per gradient evaluation
Ellipsoid method 15
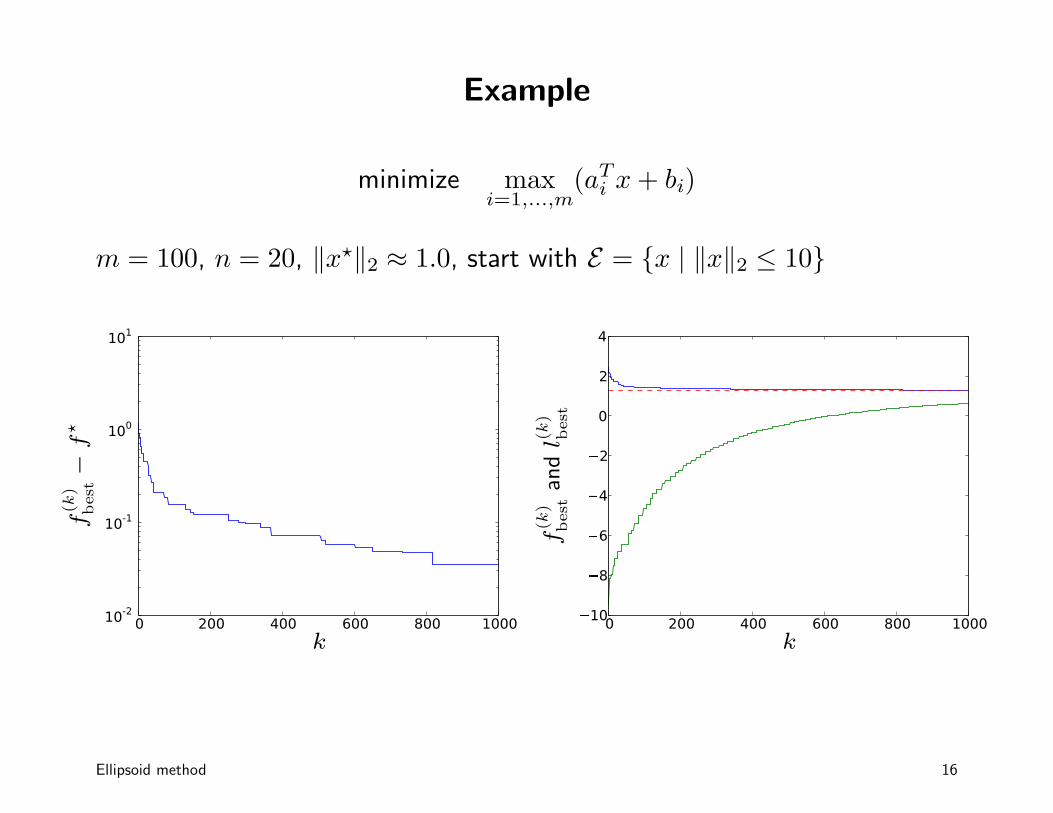
Example
minimize maxi=1,...,m
(aTi x+ bi)
m = 100, n = 20, ‖x⋆‖2 ≈ 1.0, start with E = {x | ‖x‖2 ≤ 10}
0 200 400 600 800 100010-2
10-1
100
101
k
f(k
)best−
f⋆
0 200 400 600 800 1000
� 10
� 8
� 6
� 4
� 2
0
2
4
k
f(k
)bestandl(k)
best
Ellipsoid method 16
Deep cut ellipsoid method
minimum volume ellipsoid containing ellipsoid intersected with halfspace
E ∩{
z | gT (z − x) + h ≤ 0}
with h ≥ 0, is given by
x+ = x−1 + αn
n+ 1P g̃
P+ =n2(1− α2)
n2 − 1
(
P −2(1 + αn)
(n+ 1)(1 + α)P g̃g̃TP
)
where
g̃ =g
√
gTPg, α =
h√
gTPg
(if α > 1, intersection is empty)
Ellipsoid method 17
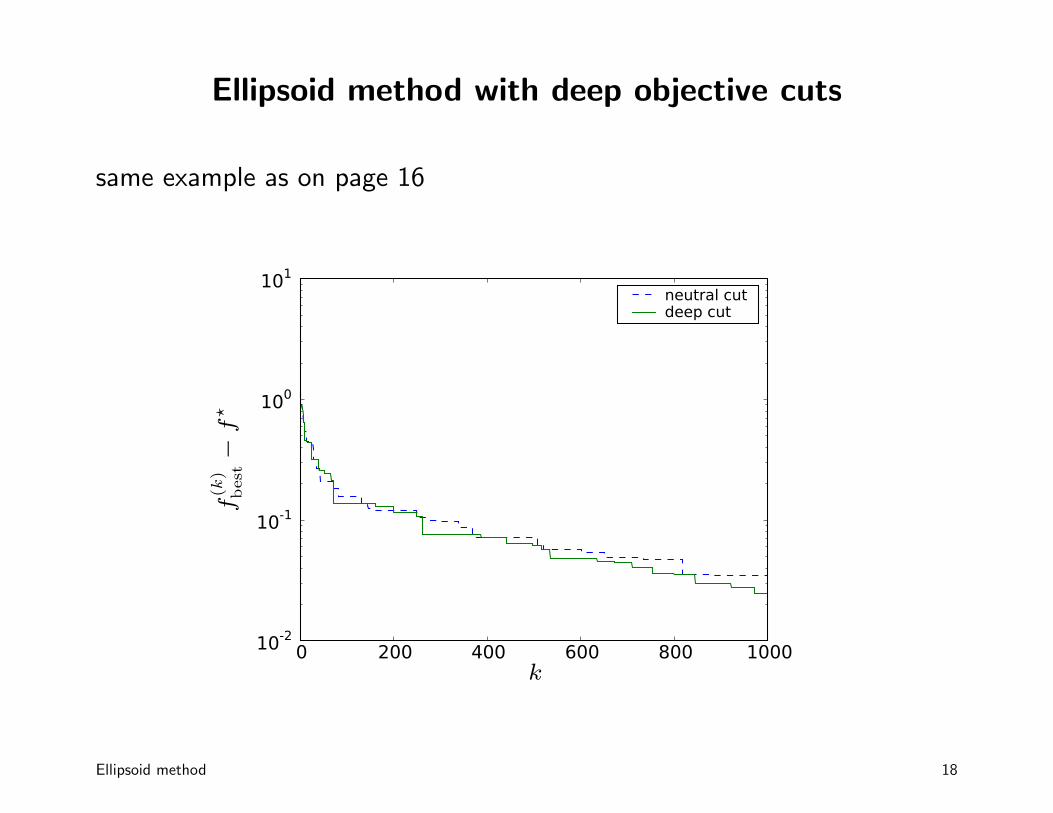
Ellipsoid method with deep objective cuts
same example as on page 16
0 200 400 600 800 100010-2
10-1
100
101
neutral cutdeep cut
k
f(k
)best−
f⋆
Ellipsoid method 18
Inequality constrained problems
minimize f0(x)subject to fi(x) ≤ 0, i = 1, . . . ,m
• if x(k) is feasible, update ellipsoid with objective cut
gT0 z ≤ gT0 x(k) − f0(x
(k)) + f(k)best, g0 ∈ ∂f0(x
(k))
f(k)best is best objective value of feasible iterates so far
• if x(k) is infeasible (say, fj(x(k)) > 0), use feasibility cut
gTj z ≤ gTj x(k) − fj(x
(k)), gj ∈ ∂fj(x(k))
Ellipsoid method 19
Stopping criterion
• if x(k) is feasible, we have lower bound on p⋆ as before:
p⋆ ≥ f0(x(k))−
√
g(k)T0 P (k−1)g
(k)0
• if x(k) is infeasible, we have for all x ∈ Ek−1
fj(x) ≥ fj(x(k)) + g
(k)Tj (x− x(k))
≥ fj(x(k)) + inf
z∈Ek−1
g(k)T (z − x(k))
= fj(x(k))−
√
g(k)Tj P (k−1)g
(k)j
hence, problem is infeasible if for some j,
fj(x(k))−
√
g(k)Tj P (k−1)g
(k)j > 0
Ellipsoid method 20
stopping criteria: terminate algorithm when
• x(k) is known to be ǫ-suboptimal:
x(k) is feasible and
√
g(k)T0 P (k−1)g
(k)0 ≤ ǫ
• or problem is shown to be infeasible:
fj(x(k))−
√
g(k)Tj P (k−1)g
(k)j > 0 for some j
Ellipsoid method 21





























