Embed Size (px)
Citation preview

Rational Solutions of the Painleve Equations andApplications to Soliton Equations
Peter A Clarkson
Institute of Mathematics, Statistics and Actuarial ScienceUniversity of Kent, Canterbury, CT2 7NF, UK
Acknowledgements
Bernard Deconick (University of Washington, Seattle, USA)Galina Filipuk (Kumamoto University, Japan)Andy Hone (University of Kent, UK)Elizabeth Mansfield (University of Kent, UK)
UNIVERSITY OF KENTAT CANTERBURY █ █ █ █
kentkent

Outline• Introduction
• Rational solutions of the second Painleve equation
d2w
dz2= 2w3 + zw + α PII
• Rational solutions of the Korteweg-de Vries and modified Korteweg-de Vries equa-tions
ut + 6uux + uxxx = 0, vt − 6v2vx + vxxx = 0
• Rational solutions of the fourth Painleve equation
d2w
dz2=
1
2w
(dw
dz
)2
+3
2w3 + 4zw2 + 2(z2 − α)w +
β
wPIV
• Rational solutions of the classical Boussinesq system{ut + vx + uux = 0vt + (uv)x + uxxx = 0
• Rational and rational-oscillatory solutions of the nonlinear Schrodinger equation
iut = uxx ± 2|u|2u• Discussion and concluding remarks
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 2

History of the Painleve Equations• Derived by Painleve, Gambier and colleagues in the late 19th/early 20th centuries
• Studied in Minsk, Belarus by Erugin, Lukashevich, Gromak et al. since 1950’s; muchof their work is published in the journal Diff. Eqns., the translation of Diff. Urav.
• Barouch, McCoy, Tracy & Wu [1973, 1976] showed that the correlation function ofthe two-dimensional Ising model is expressible in terms of solutions of PIII.
• Ablowitz & Segur [1977] demonstrated a close connection between completely in-tegrable PDEs solvable by inverse scattering, the soliton equations, such as theKorteweg-de Vries and nonlinear Schrodinger equations, and the Painleve equations.
• Flaschka & Newell [1980] introduced the isomonodromy deformation method (in-verse scattering for ODEs), which expresses the Painleve equation as the compati-bility condition of two linear systems of equations and are studied using Riemann-Hilbert methods. Subsequent developments by Deift, Fokas, Its, Zhou, . . .
• Algebraic and geometric studies of the Painleve equations by Okamoto in 1980’s.Subsequent developments by Noumi, Umemura, Yamada, . . .
• The Painleve equations are a chapter in the “Digital Library of Mathematical Func-tions”, which is a rewrite/update of Abramowitz & Stegun’s “Handbook of Mathe-matical Functions” due to appear soon (see http://dlmf.nist.gov).
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 3

Painleve Conjecture (Ablowitz, Ramani & Segur [1978])Every ODE which arises as a similarity reduction of a PDE solvable by inverse scatter-ing possesses the Painleve property (perhaps only after a transformation of variables).
Symmetry Reductions of Soliton EquationsKorteweg-de Vries ut + 6uux + uxxx = 0 PI, PII
Modified Korteweg-de Vries ut − 6u2ux + uxxx = 0 PII
Nonlinear Schrodinger iut + uxx ± 2|u|2u = 0 PII, PIV
Derivative nonlinear Schrodinger iut + uxx ± i(|u|2u)x = 0 PIV
Sine-Gordon uxt = sin u PIII, PV
Boussinesq utt + (u2)xx ± 13uxxxx = 0 PI, PII, PIV
Classical Boussinesq{
ut + vx + uux = 0vt + (uv)x ± uxxx = 0 PII, PIV
Kadomstev-Petviashvili (ut + 6uux + uxxx)x ± 3uyy = 0 PI, PII, PIV
Davey-Stewartson
{iut + (uyy ± uxx) = (φ − |u|2)uφxx ∓ φyy = (|u|2)xx
PII, PIV
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 4

Applications of the Painleve Equations• Asymptotics of nonlinear evolution equations• Statistical Mechanics: correlation functions of the XY model, Ising model• Random matrix theory: Gaussian Orthogonal, Unitary and Sympletic Emsembles• Length of longest increasing subsequences and patience sorting• Distribution of zeros of the Riemann zeta function• The bus system in Cuernavaca (Mexico), Aztec diamond tiling and airline boarding• Shape fluctuations in polynuclear growth models• Quantum gravity and quantum field theory• Topological field theory (Witten-Dijkgraaf-Verlinde-Verlinde equations)• Reductions of the self-dual Yang-Mills and Einstein equations• Surfaces with constant negative curvature• General relativity and plasma Physics• Nonlinear waves: resonant oscillations in shallow water, convective flows with vis-
cous dissipation, Gortler vortices in boundary layers, Hele-shaw problems• Polyelectrolytes, Electrolysis and Superconductivity• Bose-Einstein condensation• Nonlinear optics and fibre optics• Stimulated Raman Scattering
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 5

Solutions of PII
d2w
dz2= 2w3 + zw + α PII
Theorem (Umemura & Watanabe [1997])
(1) For every α = n ∈ Z there exists a unique rational solution of PII, which has noarbitrary constants.
(2) For every α = n + 12, with n ∈ Z, there exists a unique classical solution of PII,
each of which is rationally written in terms of Airy functions and has one arbitraryconstant.
(3) For all other values of α, the solution of PII is nonclassical, i.e. transcendental.
Remarks• The general solution w(z; α) of PII, for all values of α, is a meromorphic, transcen-
dental function.
• Yablonskii & Vorob’ev [1965] proved (1).
• Gambier [1910], Gromak [1978], Airault [1979], Flaschka & Newell [1980], Okamoto[1986] and Albrecht, Mansfield & Milne [1996] proved (2).
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 6

Rational Solutions of PII — Vorob’ev–Yablonskii Polynomials
Theorem (Yablonskii & Vorob’ev [1965])Suppose that Qn(z) satisfies the recursion relation
Qn+1Qn−1 = zQ2n − 4
[QnQ
′′n − (Q′
n)2]
with Q0(z) = 1 and Q1(z) = z. Then the rational function
w(z; n) =d
dzln
{Qn−1(z)
Qn(z)
}=
Q′n−1(z)
Qn−1(z)− Q′
n(z)
Qn(z)
satisfies PII
w′′ = 2w3 + zw + α
with α = n ∈ Z+. Further w(z; 0) = 0 and w(z;−n) = −w(z; n).
The Yablonskii–Vorob’ev polynomials are monic polynomials of degree 12n(n + 1)
Q2(z) = z3 + 4
Q3(z) = z6 + 20z3 − 80
Q4(z) = z10 + 60z7 + 11200z
Q5(z) = z15 + 140z12 + 2800z9 + 78400z6 − 313600z3 − 6272000
Q6(z) = z21 + 280z18 + 18480z15 + 627200z12 − 17248000z9 + 1448832000z6
+ 19317760000z3 − 38635520000
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 7

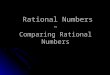
Roots of Yablonskii–Vorob’ev Polynomial Q25(z)
–10
–5
0
5
10
–10 –5 0 5
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 8

Theorem (Fukutani, Okamoto & Umemura [2000])
• The polynomial Qn(z) has 12n(n + 1) simple roots.
• The polynomials Qn(z) and Qn+1(z) have no common roots.
Theorem (PAC & Joshi)
• The polynomials Q2n−1(z) and Q2n(z) have n real roots.
• The real roots of Qn−1(z) and Qn+1(z) and of Qn(z) and Qn+1(z) interlace.
Remarks• Since Qn(z) has only simple roots then
Qn(z) =
n(n+1)/2∏j=1
(z − an,j)
where an,j, for j = 1, 2, . . . , 12n(n + 1), are the roots. These roots satisfy
n(n+1)/2∑j=1,j �=k
1
(an,j − an,k)3= 0, j = 1, 2, . . . , 1
2n(n + 1)
• If An = max1≤j≤n(n+1)/2
{|an,j|} then n2/3 ≤ An+2 ≤ 4n2/3 (Kametaka [1983]).
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 9

Determinantal Form of Rational Solutions of PIITheorem (Kajiwara & Ohta [1996])
Let ϕk(z) be the polynomial defined by∞∑
j=0
ϕj(z)λj = exp(zλ − 4
3λ3), ϕj(z) = 1F2(a; b1, b2; z
3/36)
and τn(z) be the n × n determinant given by
τn(z) =
∣∣∣∣∣∣∣∣
ϕn ϕn+1 · · · ϕ2n−1
ϕn−2 ϕn−1 · · · ϕ2n−3... ... . . . ...
ϕ−n+2 ϕ−n+3 · · · ϕ1
∣∣∣∣∣∣∣∣≡
∣∣∣∣∣∣∣∣
ϕ1 ϕ3 · · · ϕ2n−1
ϕ′1 ϕ′
3 · · · ϕ′2n−1
... ... . . . ...ϕ
(n−1)1 ϕ
(n−1)3 · · · ϕ
(n−1)2n−1
∣∣∣∣∣∣∣∣then
wn(z) =d
dzln
{τn−1(z)
τn(z)
}
satisfies PII with α = n.
Remarks• Flaschka and Newell [1980], following the earlier work of Airault [1979], expressed
the rational solutions of PII as the logarithmic derivatives of determinants.
• The Yablonskii–Vorob’ev polynomials can be expressed as Schur polynomials.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 10

Schur Polynomials• A partition λ = (λ1, λ2, . . . , λn) is a sequence of descending non-zero numbers such
that λ1 ≥ λ2 ≥ . . . ≥ λn > 0.
• The numbers λj are the parts of λ, the number of non-zero parts is the length �(λ),and the sum of the parts is the weight |λ|.
• The Schur polynomial Sλ(x), where x = (x1, x2, . . .), for the partitionλ = (λ1, λ2, . . . , λn) is defined by
Sλ(x) =
∣∣∣∣∣∣∣∣
ϕλ1(x) ϕλ1+1(x) . . . ϕλ1+n−1(x)ϕλ2−1(x) ϕλ2(x) . . . ϕλ2+n−2(x)
... ... . . . ...ϕλn−n+1(x) ϕλn−n+2(x) . . . ϕλn(x)
∣∣∣∣∣∣∣∣where the polynomials ϕm(x) are defined by the generating function
∞∑m=0
ϕm(x)ξm = exp
∞∑
j=1
xj ξj
with ϕm(x) = 0, for m < 0.
• For the Yablonskii–Vorob’ev polynomials
Qn(z) = cnS(n,n−1,...,1)(z, 0,−43, 0, 0, . . .), cn =
∏nj=1(2j + 1)n−j
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 11

Discriminants of Yablonskii–Vorob’ev Polynomials• Let f (z) = zm +am−1z
m−1 + . . .+a1z +a0 be a monic polynomial of degree m withroots α1, α2, . . . , αm, so f (z) =
∏mj=1(z − αj).
• The discriminant of f (z) is Dis(f ) =∏
1≤j<k≤m(αj − αk)2.
• For the Yablonskii–Vorob’ev polynomials
Dis(Q2(z)) = −24 33
Dis(Q3(z)) = 220 312 55
Dis(Q4(z)) = 260 327 520 77
Dis(Q5(z)) = 2140 366 545 728
Dis(Q6(z)) = −2280 3147 580 763 1111
Dis(Q7(z)) = 2504 3270 5125 7112 1144 1313
Dis(Q8(z)) = 2840 3450 5195 7175 1199 1352
Dis(Q9(z)) = 21320 3702 5305 7252 11176 13117 1717
Dis(Q10(z)) = −21980 31026 5455 7343 11275 13208 1768 1919
Dis(Q11(z)) = 22860 31443 5645 7469 11396 13325 17153 1976
Dis(Q12(z)) = 24004 31974 5875 7651 11539 13468 17272 19171 2323
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 12

Rational Solutions of the Modified Korteweg-de Vries Equation
The modified Korteweg-de Vries (mKdV) equation
vt − 6v2vx + vxxx = 0
which is a soliton equation solvable by inverse scattering (Ablowitz, Kaup, Newell &Segur [1973]), has the scaling reduction
u(x, t) = w(z)/(3t)1/3, z = x/(3t)1/3
where w(z) satisfies PII
w′′ = 2w3 + zw + α
with α a constant of integration, and so
v(x, t) =1
(3t)1/3d2
dz2ln
{Qn−1(z)
Qn(z)
}, z = x/(3t)1/3
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 13

Rational Solutions of the Korteweg-de Vries Equation
The Korteweg-de Vries (KdV) equation
ut + 6uux + uxxx = 0
which is the best known example of a soliton equation solvable by inverse scattering(Gardner, Green, Kruskal & Miura [1967]), has the scaling reduction
u(x, t) = W (z)/(3t)2/3, z = x/(3t)1/3
where W (z) satisfiesW ′′′ + 6WW ′ = 2W + zW ′ (1)
whose solution is expressible in terms of the solution w of PII (Fokas & Ablowitz[1982])
W = −w′ − w2, w =W ′ + α
2W − zIt can be shown that rational solutions of (1) have the form
Wn(z) = 2d2
dz2ln Qn(z)
where Qn(z) are the Yablonskii–Vorob’ev polynomials and so
u(x, t) =2
(3t)2/3d2
dz2ln Qn(z), z = x/(3t)1/3
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 14

Rational Solutions of the KdV and mKdV Equations
Define the polynomials ϕn(x, t) by∞∑
n=0
ϕn(x, t)λn = exp(xλ − 4tλ3
)
and then define
Θn(x, t; κn) = cnWx(ϕ1, ϕ3, . . . , ϕ2n−1), cn =
n∏j=1
(2n − 2j + 1)j
where Wx(ϕ1, ϕ3, . . . , ϕ2n−1) is the Wronskian with respect to x, which is a polynomialin x of degree 1
2n(n + 1) with coefficients that are polynomials in t.Then the KdV and mKdV equations have rational solutions respectively in the form
u(x, t) = 2∂2
∂x2{ln Θn(x, t)}
v(x, t) =∂
∂xln
{Θn−1(x, t)
Θn(x, t)
}
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 15

Generalized Rational Solutions of the KdV and mKdV EquationsDefine the polynomials ϕn(x, t; κn) by
∞∑n=0
ϕn(x, t; κn)λn = exp
xλ − 4tλ3 −
∞∑j=3
κjλ2j−1
2j − 1
where κn = (κ3, κ4, . . . , κn), with κ3, κ4, . . . , κn arbitrary constants, and then define
Θn(x, t; κn) = cnWx(ϕ1, ϕ3, . . . , ϕ2n−1), cn =
n∏j=1
(2n − 2j + 1)j
where Wx(ϕ1, ϕ3, . . . , ϕ2n−1) is the Wronskian with respect to x, which is a polynomialin x of degree 1
2n(n + 1) with coefficients that are polynomials in t.Then the KdV and mKdV equations have rational solutions respectively in the form
u(x, t) = 2∂2
∂x2{ln Θn(x, t; κn)} , v(x, t) =
∂
∂xln
{Θn−1(x, t; κn−1)
Θn(x, t; κn)
}(∗)
RemarkThe rational solutions of the KdV and mKdV equations obtained in terms of the
Yablonskii–Vorob’ev polynomials are the special case of (∗) with κn ≡ 0.
Θ3(x, t; 1) = x6 + 60tx3 − 9x − 720t2
Θ4(x, t; 1, 0) = x10 + 180tx7 − 63x5 + 3780tx2 + 302400t3x − 189
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 16

Rational Solutions of PIV
d2w
dz2=
1
2w
(dw
dz
)2
+3
2w3 + 4zw2 + 2(z2 − α)w +
β
wPIV
Theorem (Lukashevich [1967], Gromak [1987], Murata [1985])PIV has rational solutions if and only if
(i) (α, β) =(m,−2(2n − m + 1)2
)or (ii) (α, β) =
(m,−2(2n − m + 1
3)2)
with m, n ∈ Z. Further the rational solutions for these parameter values are unique.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 17

PIV — Generalized Hermite PolynomialsTheorem (Noumi & Yamada [1998])
Suppose that Hm,n(z), with m, n ≥ 0, satisfies the recurrence relations
2mHm+1,nHm−1,n = Hm,nH′′m,n −
(H ′
m,n
)2+ 2mH2
m,n
−2nHm,n+1Hm,n−1 = Hm,nH′′m,n −
(H ′
m,n
)2 − 2nH2m,n
with H0,0(z) = H1,0(z) = H0,1(z) = 1, H1,1(z) = 2z then
w(i)m,n = w(z; α(i)
m,n, β(i)m,n) =
d
dzln
(Hm+1,n
Hm,n
)
w(ii)m,n = w(z; α(ii)
m,n, β(ii)m,n) =
d
dzln
(Hm,n
Hm,n+1
)
w(iii)m,n = w(z; α(iii)
m,n, β(iii)m,n) = −2z +
d
dzln
(Hm,n+1
Hm+1,n
)
are respectively solutions of PIV for
(α(i)m,n, β
(i)m,n) = (2m + n + 1,−2n2)
(α(ii)m,n, β
(ii)m,n) = (−m − 2n − 1,−2m2)
(α(iii)m,n, β
(iii)m,n) = (n − m,−2(m + n + 1)2)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 18

Roots of the Generalized Hermite Polynomials Hm,n(z)
–10
–5
0
5
10
–10 –5 0 5 10
–10
–5
0
5
10
–10 –5 0 5 10
H20,20(z) H21,19(z)
m × n “rectangles”
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 19

Properties of the Generalized Hermite Polynomials• Hn,1(z) = Hn(z), where Hn(z) is the Hermite polynomial defined by
Hn(z) = (−1)n exp(z2
) dn
dzn
{exp
(−z2
)}or through the generating function
∞∑n=0
Hn(z) λn
n!= exp
(2λz − λ2
)
• The polynomial Hm,n(z) can be expressed in determinantal form
Hm,n(z) = am,n W(Hm(z), Hm+1(z), . . . , Hm+n−1(z)), am,n =
n−1∏j=1
(12)
j
j!
or equivalently through the Schur polynomial
Hm,n(z) = bm,n S(mn)(2z,−1, 0, 0, . . .), bm,n =
n−1∏j=0
(m + j)!
j!
where (mn) = (m, m, . . . , m︸ ︷︷ ︸n
) (Kajiwara & Ohta [1998], Noumi & Yamada [1998])
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 20

More Properties of the Generalized Hermite Polynomials• The polynomial Hm,n(z) can also be expressed as the multiple integral
Hm,n(z) =πm/2
∏mk=1 k!
2m(m+2n−1)/2
∫ ∞
−∞· · ·n
∫ ∞
−∞
n∏i=1
n∏j=i+1
(xi − xj)2
n∏k=1
(z − xk)m
× exp(−x2
1 − x22 − . . . − x2
n
)dx1 dx2 . . . dxn
which arises in random matrix theory (Brezin & Hikami [2000], Chan & Feigen[2006], Forrester & Witte [2001])
• The monic polynomials orthogonal on the real line with respect to the weight
w(x; z, m) = (x − z)m exp(−x2)
satisfy the three-term recurrence relation
xpn(x) = pn+1(x) + an(z; m)pn(x) + bn(z; m)pn−1(x)
where
an(z; m) = −1
2
d
dzln
(Hn+1,m
Hn,m
), bn(z; m) =
nHn+1,mHn−1,m
2H2n,m
(Chan & Feigen [2006])
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 21

PIV — Generalized Okamoto PolynomialsTheorem (Noumi & Yamada [1998])
Suppose that Qm,n(z), with m, n ∈ Z, satisfies the recurrence relations
Qm+1,nQm−1,n = 92
[Qm,nQ
′′m,n −
(Q′
m,n
)2]
+[2z2 + 3(2m + n − 1)
]Q2
m,n
Qm,n+1Qm,n−1 = 92
[Qm,nQ
′′m,n −
(Q′
m,n
)2]
+[2z2 + 3(1 − m − 2n)
]Q2
m,n
with Q0,0 = Q1,0 = Q0,1 = 1 and Q1,1 =√
2 z then
w(i)m,n = w(z; α(i)
m,n, β(i)m,n) = −2
3z +d
dzln
(Qm+1,n
Qm,n
)
w(ii)m,n = w(z; α(ii)
m,n, β(ii)m,n) = −2
3z +d
dzln
(Qm,n
Qm,n+1
)
w(iii)m,n = w(z; α(iii)
m,n, β(iii)m,n) = −2
3z +d
dzln
(Qm,n+1
Qm+1,n
)
are respectively solutions of PIV for
(α(i)m,n, β
(i)m,n) = (2m + n,−2(n − 1
3)2)
(α(ii)m,n, β
(ii)m,n) = (−m − 2n,−2(m − 1
3)2)
(α(iii)m,n, β
(iii)m,n) = (n − m,−2(m + n + 1
3)2)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 22

Roots of the Generalized Okamoto Polynomials Qm,n(z), m,n > 0
–8
–6
–4
–2
0
2
4
6
8
–6 –4 –2 0 2 4 6 8 –8
–6
–4
–2
0
2
4
6
8
–6 –4 –2 0 2 4 6 8
Q10,10(z) Q11,9(z)
m × n “rectangles” and “equilateral triangles” with sides m − 1 and n − 1
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 23

Roots of the Generalized Okamoto Polynomials Qm,n(z), m,n < 0
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
Q−8,−8(z) Q−9,−7(z)
m × n “rectangles” and “equilateral triangles” with sides m and n
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 24

The generalized Okamoto polynomials have representations
Qm,n(z) = cm,nSλ(m,n)(2z, 3, 0, 0, . . .)
Q−m,−n(z) = c−m,−nSλ(−m,−n)(2z, 3, 0, 0, . . .)
where the partitions are given by
λ(m, n) = (2m + n − 2, 2m + n − 4, . . . , n + 2, n,
n − 1, n − 1, n − 2, n − 2, . . . , 2, 2, 1, 1)
λ(−m,−n) = (2m + n, 2m + n − 2, . . . , n + 4, n + 2,
n, n, n − 1, n − 1, . . . , 2, 2, 1, 1)
and cm,n and c−m,−n are constants chosen so that Qm,n(12
√2 ζ) and Q−m,−n(
12
√2 ζ) are
monic polynomials, respectively.Alternatively the generalized Okamoto polynomials have Wronskian representations
Qm,n(z) = cm,nW(ϕ1, ϕ4, . . . , ϕ3m+3n−5; ϕ2, ϕ5, . . . , ϕ3n−4)
Q−m,−n(z) = c−m,−nW(ϕ1, ϕ4, . . . , ϕ3n−2; ϕ2, ϕ5, . . . , ϕ3m+3n−1)
where the polynomials ϕj(z) are defined by∞∑
k=0
ϕk(z)ξk = exp(2zξ + 3ξ2
), ϕk(z) = 3k/2e−kπi/2Hk
(iz√3
)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 25

Classical Boussinesq System{
ut + vx + uux = 0
vt + (uv)x + uxxx = 0
• Arises in the description of surface waves propagating in shallow water (cf. Broer[1975], Whitham [1974])
• Solvable by inverse scattering (Kaup [1975])
• Setting u = Ux and eliminating v yields the dispersive water-wave equation
Utt + UtUxx + 2UxUxt + 32U
2xUxx − Uxxxx = 0
• Equivalent to the systems{ut + ηx + 3
2uux = 0
ηt + 12uηx + ηux + uxxx = 0{
ut + ζx + uux − βuxx = 0
ζt + (uζ)x + αuxxx + βζxx = 0
with α and β constants, which were studied by Jaulent & Miodek [1976] and Kuper-schmidt [1985], respectively.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 26

{ut + vx + uux = 0
vt + (uv)x + uxxx = 0
Scaling reduction
u(x, t) =U(z) + 2z√
t, v(x, t) =
V (z)
t, z =
x
2√
t
where U(z) and V (z) satisfy
U + zU ′ + V ′ + UU ′ = 0
U ′′′ + 4U ′V + 4UV ′ + 4zV ′ = 0
HenceV = −1
2U2 − zU + α
with α an arbitrary constant, and then
U ′′′ = 6U 2U ′ + 12zUU ′ + 4U 2 + 4zU + 4(z2 − α)U ′
which has first integral
U ′′ =(U ′)2
2U+ 3
2U3 + 4zU 2 + 2(z2 − α)U +
β
UPIV
with β another arbitrary constant.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 27

{U + zU ′ + V ′ + UU ′ = 0
U ′′′ + 4U ′V + 4UV ′ + 4zV ′ = 0
Generalized Hermite Polynomial Solutions
U (i)m,n =
d
dzln
(Hm+1,n
Hm,n
), V (i)
m,n = 2m + 1 + 12
d2
dz2ln (Hm+1,nHm,n)
U (ii)m,n =
d
dzln
(Hm,n
Hm,n+1
), V (ii)
m,n = −2n − 1 + 12
d2
dz2ln (Hm,nHm,n+1)
U (iii)m,n = −2z +
d
dzln
(Hm,n+1
Hm+1,n
), V (iii)
m,n = 12
d2
dz2ln (Hm,n+1Hm+1,n)
Generalized Okamoto Polynomial Solutions
U (i)m,n = −2
3z +d
dzln
(Qm+1,n
Qm,n
), V (i)
m,n = 49z
2 + 23(2m + n) + 1
2
d2
dz2ln (Qm+1,nQm,n)
U (ii)m,n = −2
3z +d
dzln
(Qm,n
Qm,n+1
), V (ii)
m,n = 49z
2 − 23(m + 2n) + 1
2
d2
dz2ln (Qm,nQm,n+1)
U (iii)m,n = −2
3z +d
dzln
(Qm,n+1
Qm+1,n
), V (iii)
m,n = 49z
2 + 23(n − m) + 1
2
d2
dz2ln (Qm,n+1Qm+1,n)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 28

Generalized Hermite Polynomial SolutionsDefine the polynomials ϕn(x, t) by
∞∑n=0
ϕn(x, t)λn
n!= exp(xλ − tλ2), ϕn(x, t) = tn/2Hn
( x
2t1/2
)
and then defineΦm,n(x, t) = Wx(ϕm, ϕm+1, . . . , ϕm+n−1)
where Wx(ϕm, ϕm+1, . . . , ϕm+n−1) is the Wronskian with respect to x.Then the classical Boussinesq system has rational solutions in the form
u(i)m,n(x, t) =
x
t+ 2
∂
∂xln {Φm+1,n(x, t)/Φm,n(x, t)}
v(i)m,n(x, t) =
2m + 1
t+ 2
∂2
∂x2ln {Φm+1,n(x, t)Φm,n(x, t)}
u(ii)m,n(x, t) =
x
t+ 2
∂
∂xln {Φm,n(x, t)/Φm,n+1(x, t)}
v(ii)m,n(x, t) = −2n + 1
t+ 2
∂2
∂x2ln {Φm,n(x, t)Φm,n+1(x, t)}
u(iii)m,n(x, t) = 2
∂
∂xln {Φm,n+1(x, t)/Φm+1,n(x, t)}
v(iii)m,n(x, t) = 2
∂2
∂x2ln {Φm,n+1(x, t)Φm+1,n(x, t)}
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 29

Generalized Okamoto Polynomial SolutionsDefine the polynomials ψn(x, t) by
∞∑n=0
ψn(x, t)λn = exp(xλ + 3tλ2
), ψn(x, t) =
in(3t)n/2
n!Hn
( −ix
2(3t)1/2
)
and then defineΨm,n(x, t) = Sλ(m,n)(x, 3t,0)
where Sλ(m,n)(x, 3t,0) is the Schur polynomial, with partition λ(m, n) as above.Then the classical Boussinesq system has rational solutions in the form
u(i)m,n(x, t) =
2x
3t+ 2
∂
∂xln {Ψm+1,n(x, t)/Ψm,n(x, t)}
v(i)m,n(x, t) =
x2
9t2+
2(2m + n)
3t+ 2
∂2
∂x2ln {Ψm+1,n(x, t)Ψm,n(x, t)}
u(ii)m,n(x, t) =
2x
3t+ 2
∂
∂xln {Ψm,n(x, t)/Ψm,n+1(x, t)}
v(ii)m,n(x, t) =
x2
9t2− 2(m + 2n)
3t+ 2
∂2
∂x2ln {Ψm,n(x, t)Ψm,n+1(x, t)}
u(iii)m,n(x, t) =
2x
3t+ 2
∂
∂xln {Ψm,n+1(x, t)/Ψm+1,n(x, t)}
v(iii)m,n(x, t) =
x2
9t2+
2(n − m)
3t+ 2
∂2
∂x2ln {Ψm,n+1(x, t)Ψm+1,n(x, t)}
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 30

Generalized Rational Solutions of the Classical Boussinesq SystemTheorem (Sachs [1988], PAC [2006])
Define the polynomials ϕn(x, t; κn) by∞∑
n=0
ϕn(x, t; κn)λn
n!= exp
xλ − tλ2 +
∞∑j=3
κjλj
where κn = (κ3, κ4, . . . , κn), and then define
Φm,n(x, t; κm+n−1) = Wx(ϕm, ϕm+1, . . . , ϕm+n−1)
where Wx(ϕm, ϕm+1, . . . , ϕm+n−1) is the Wronskian with respect to x.Then the classical Boussinesq system has rational solutions in the form
u(iii)m,n(x, t; κm+n) = 2
∂
∂xln
{Φm,n+1(x, t; κm+n)
Φm+1,n(x, t; κm+n)
}
v(iii)m,n(x, t; κm+n) = 2
∂2
∂x2ln {Φm,n+1(x, t; κm+n) Φm+1,n(x, t; κm+n)}
which decay as |x| → ∞.
Φ4,3(x, t; 1,0) = x12 − 12tx10 − 10x9 + 180t2x8 + 15(1 − 32t3)x6 + 720t2x5
− 450t(1 + 8t3)x4 + 50(1 + 192t3)x3 − 900t2(1 + 48t3)x2
+ 300t(1 − t3)x + 25(1 + 24t3 + 1728t6)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 31

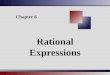
Nonlinear Schrodinger Equationiut = uxx + 2σ|u|2u, σ = ±1
• Arises in numerous physical applications including:
� water waves (Benney & Roukes [1969], Zakharov [1968]);� optical fibres (Hasegawa & Tappert [1973]);� plasmas (Zakharov [1972]);� magnetostatic spin waves (Kalinikos et al. [1997], Xia et al. [1997]).
• A soliton equation solvable by inverse scattering (Zakharov & Shabat [1972]).
• Bright solitons, which decay as |x| → ∞, arise when σ = 1 (“focusing”)
• Dark solitons, which don’t decay as |x| → ∞, arise when σ = −1 (“defocusing”)
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–4 –2 2 4
x
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–4 –2 2 4
x
Bright soliton Dark soliton
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 32

Scaling Reduction of the Nonlinear Schrodinger EquationThe de-focusing NLS equation
iut = uxx − 2|u|2uhas the scaling reduction
u(x, t) = t−1/2U(ζ), ζ = x/t1/2
where U(ζ) satisfiesU ′′ + 1
2iU + 12iζU ′ − 2|U |2U = 0
Setting U(ζ) = R(ζ) exp{iΘ(ζ)} and formally equating real and imaginary parts yields
R′′ − R (Θ′)2
= 12RζΘ′ + 2R3 (1a)
2R′Θ′ + RΘ′′ + 12ζR′ + 1
2R = 0 (1b)
Multiplying (1b) by R and integrating yields
Θ′(ζ) = −14ζ − 1
4R2(ζ)
∫ ζ
R2(s) ds
Substituting this into (1a) and setting V (ζ) =∫ ζ
R2(s) ds yields
2V ′V ′′′ = (V ′′)2 − 1
4ζ2 (V ′)
2+ 1
4V2 + 8 (V ′)
3(2)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 33

2V ′V ′′′ = (V ′′)2 − 1
4ζ2 (V ′)
2+ 1
4V2 + 8 (V ′)
3(2)
This has the first integral
(V ′′)2
= −14 (V − ζV ′)
2+ 4 (V ′)
3+ KV ′ (3)
with K an arbitrary constant, which is solvable in terms of PIV provided that
K = 19(α + 1)2, β = −2
9(α + 1)2
Making the transformation
V (ζ) = −12e
−πi/4W (z), ζ = 2eπi/4z
in (3) yields(W ′′)
2= 4 (zW ′ − W )
2 − 4 (W ′)3+ 4κ2W ′ (4)
with κ2 = 4K = 49(α + 1)2, which is a special case of the “σ-equation” satisfied by the
PIV Hamiltonian. Equation (4) has rational solutions
Wn =d
dzln Hn,n, Wn =
4z3
27+
d
dzln Qn,n
for κn = ±2n and κn = ±2(n − 13), respectively. Note that we have the restriction
m = n, so that the roots have approximately square pattern.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 34

Rational and Rational-Oscillatory Solutions of the NLS EquationTheorem (PAC [2006])
The de-focusing NLS equation
iut = uxx − 2|u|2u (1)
has decaying rational solutions of the form
uN(x, t) =Neπi/4
√t
HN+1,N−1(z)
HN,N(z), z =
x eπi/4
2√
t(2)
and non-decaying rational-oscillatory solutions of the forms
uN(x, t) =e−πi/4
3√
2t
QN+1,N−1(z)
QN,N(z)exp
(− ix2
6t
),
uN(x, t) =e−πi/4
3√
2t
Q−N−1,−N+1(z)
Q−N,−N(z)exp
(− ix2
6t
),
z =x eπi/4
2√
t(3)
where N ≥ 1.
Remarks• The rational solutions uN(x, t) given by (2) generalize the results of Hirota and Naka-
mura [1985] (see also Boiti and Pempinelli [1981], Hone [1996]).• The rational-oscillatory solutions uN(x, t) and uN(x, t) given by (3) appear to be new
solutions of the de-focusing NLS equation (1).
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 35

Rational Solutions of the NLS Equation
Theorem (PAC [2006])Define the polynomials Φn(x, t) through
∞∑n=0
Φn(x, t)λn
n!= exp
(xλ − itλ2
)
and then define
GN(x, t) = aNW(ΦN−1, ΦN, . . . , Φ2N−1),
FN(x, t) = aN−1W(ΦN, ΦN+1, . . . , Φ2N−1),aN =
N∏m=1
1
m!
so GN(x, t) and FN(x, t) are monic polynomials in x of degrees N 2 − 1 and N 2, re-spectively, with coefficients which are polynomials in t. Then the de-focusing NLSequation
iut = uxx − 2|u|2uhas rational solutions in the form
uN(x, t) =NGN(x, t)
FN(x, t)
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 36

Generalized Rational Solutions of the NLS EquationTheorem (PAC [2006])
Define the polynomials Φn(x, t; κn), with κn = (κ3, κ4, . . . , κn), through∞∑
n=0
Φn(x, t; κn)λn
n!= exp
xλ − itλ2 + i
∞∑j=3
κj(−iλ)j
j!
where κn = (κ3, κ4, . . . , κn), with κj, for j ≥ 3, arbitrary constants, and then define
GN(x, t; κ2N−1) = aNW(ΦN−1, ΦN, . . . , Φ2N−1),
FN(x, t; κ2N−1) = aN−1W(ΦN, ΦN+1, . . . , Φ2N−1),aN =
N∏m=1
1
m!
so GN(x, t; κ2N−1) and FN(x, t; κ2N−1) are monic polynomials in x of degrees N 2 − 1and N 2, respectively, with coefficients which are polynomials in t and the arbitrary pa-rameters κ2N−1 = (κ3, κ4, . . . , κ2N−1). Then the de-focusing NLS equation has rationalsolutions in the form
uN(x, t; κ2N−1) =NGN(x, t; κ2N−1)
FN(x, t; κ2N−1)
Remark• The first few of these generalized rational solutions were obtained by Hone [1996]
by applying Crum transformations successively to the associated linear problem.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 37

Writing the general solution of the NLS equation in the form
uN(x, t; κ2N−1) =
N2∑j=1
ψj(t; κ2N−1)
x − ϕj(t; κ2N−1)
we numerically studied the motion of the residues ψj(t; κ2N−1) and the poles ϕj(t; κ2N−1),for j = 1, 2, . . . , N 2.
u3(x, t; 1) = 3x3 + 6ixt − 1
x4 + 2x − 12t2
u4(x, t; 1, 0, 0) = 4x8 + 16ix6t + 4x5 − 120t2x4 − 80itx3 + 40x2 − 240t2x + 720t4 − 80it
x9 + 12x6 − 72t2x5 + 720t2x2 + 2160t4x − 40
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 38

Theorem (PAC & Hone [2006])
Rational solutions of the NLS equation
iut = uxx − 2|u|2uhave the form
u(x, t) =
N∑j=1
αj(t)
x − aj(t)+
N(N−1)/2∑k=1
{βk(t)
x − bk(t)+
γk(t)
x − b∗k(t)
}
where aj(t) are real, b∗k(t) is the complex conjugate of bk(t) and
|αj(t)| = 1, j = 1, 2, . . . , N, βk(t)γ∗k(t) = 1, k = 1, 2, . . . , 1
2N(N − 1)
with γ∗k(t) the complex conjugate of γk(t).
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 39

Rational solutions of the KdV equation
ut + 6uux + uxxx = 0
have the form
u(x, t) = −n(n+1)/2∑
j=1
2
[x − aj(t)]2
where the real functions aj(t), j = 1, 2, . . . , 12n(n+1), satisfy the constrained Calogero-
Moser system
daj
dt+
n(n+1)/2∑k=1k �=j
12
(aj − ak)2= 0,
n(n+1)/2∑k=1k �=j
1
(aj − ak)3= 0
(Airault, McKean & Moser [1977], Choodnovsky & Choodnovsky [1977]; also Adler& Moser [1978]).
The poles of rational solutions of the classical Boussinesq system and the Boussinesqequation satisfy similar constrained dynamical systems.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 40

Generalized Rational Solutions of the Boussinesq EquationTheorem (PAC [2006])
Define the polynomials ψn(x, t; κn) by
∞∑n=0
ψn(x, t; κn)λn = exp
xλ + tλ2 +
∞∑j=3
κjλj
where κn = (κ3, κ4, . . . , κn), and then define
Ψm,n(x, t; κm,n) = Sλ(m,n)(x, t, κm,n)
where Sλ(m,n)(x, t, κm,n) is the Schur polynomial, with partitions λ(m, n) as givenabove. Then the Boussinesq equation
utt + (u2)xx + 13uxxxx = 0
has rational solutions in the form
um,n(x, t; κm,n) = 2∂2
∂x2ln Ψm,n(x, t; κm,n)
which decay as |x| → ∞.Remark
These rational are generalizations of those obtained using the “classical” scaling re-duction of the Boussinesq equation. Rational solutions generated by the “nonclassical”scaling reduction do not decay as |x| → ∞ and are not generalizable.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 41

Conclusions• The roots of the special polynomials associated with rational solutions of PII and PIV
have a very symmetric, regular structure.
• Similar symmetric structures arise for the roots of special polynomials associatedwith rational and algebraic solutions of PIII and PV.
• Rational solutions of the KdV, mKdV and de-focusing NLS equations and classi-cal Boussinesq system can be expressed in terms of the special polynomials asso-ciated with rational solutions of PII and PIV. Generalized rational solutions, whichare expressed in terms of Schur polynomials, can be obtained only when the rationalsolutions decay as |x| → ∞. Similar results hold for the Boussinesq equation.
• The poles of rational solutions of the KdV and mKdV equations satisfy a dynamicalsystem, a constrained Calogero-Moser system. The poles of rational solutions of theclassical Boussinesq system and the Boussinesq equation also satisfy constrainedCalogero-Moser systems.
• The poles and residues of rational solutions of the de-focusing NLS equation havean interesting dynamical structure. The rational-oscillatory solutions of the NLSequation appear to be new solutions.
• This seems to be yet another remarkable property of “integrable” differential equa-tions, in particular the soliton equations and the Painleve equations.
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 42

Open Problems• Is there an analytical explanation and interpretation of these computational results?
� Is there an interlacing property for the roots in the complex plane?
� Is there a generating function such that∑∞
n=0 Qn(z)λn = Ψ(z, λ)?
� Are these special polynomials orthogonal either on a (complex) curve Γ or in adomain of the complex plane?
• What is the structure of the roots of the special polynomials associated with rationaland algebraic solutions of PVI and discrete Painleve equations?
• The dynamical system satisfied by the poles and residues, or equivalently the dynam-ical system satisfied by the poles and zeroes, of generalized rational solutions of theNLS equation should be studied further.
• A study of the pole dynamics of elliptic solutions of the NLS equation, Boussinesqequation and classical Boussinesq system.
• What is the structure of the roots of special polynomials associated with rationalsolutions and other special solutions of other soliton equations?
• Do these special polynomials have applications, e.g. in numerical analysis?
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 43

References• P A Clarkson & E L Mansfield, “The second Painleve equation, its hierarchy and
associated special polynomials”, Nonlinearity, 16 (2003) R1–R26• P A Clarkson, “Remarks on the Yablonskii–Vorob’ev polynomials”, Phys. Lett.,
A319 (2003) 137–144• P A Clarkson, “The third Painleve equation and associated special polynomials”, J.
Phys. A: Math. Gen., 36 (2003) 9507–9532• P A Clarkson, “The fourth Painleve equation and associated special polynomials”, J.
Math. Phys., 44 (2003) 5350–5374• P A Clarkson, “Special polynomials associated with rational solutions of the fifth
Painleve equation”, J. Comp. Appl. Math., 178 (2005) 111–129• P A Clarkson, “On rational solutions of the fourth Painleve equation and its Hamil-
tonian”, CRM Proc. Lect. Notes, 39 (2005) 103–118• P A Clarkson, “Special polynomials associated with rational solutions of the Pain-
leve equations and applications to soliton equations”, Comp. Methods Func. Theory,6 (2006) 329–401
• P A Clarkson, “Special polynomials associated with rational solutions of the defo-cusing nonlinear Schrodinger and the fourth Painleve equation”, Europ. J. Appl.Math. (2006) to appear (doi:10.1017/S0956792506006565)
• P A Clarkson, “Special polynomials associated with rational and algebraic solutionsof the Painleve equations”, Societe Mathematique de France (2006) to appear
• P A Clarkson, “Special polynomials associated with rational solutions of the classicalBoussinesq system”, in preparation
Symmetries and Overdetermined Systems of PDEs, IMA, Minneapolis, August 2006 44