Embed Size (px)
Citation preview

C H A T E
2-1a . lL ' L
2-3
Vector Algebra
Overview
Basic Laws of Vector Algebra
Orthogonal Coordinate Systems
Tlansformations between Coordinate Systems

OvrnvtEW
Temperature, mass, and electric current are scalarquantities, meaning that each one of them can be.-ompletely specified by its magnitude, if it is a positivereal number, or by its magnitude and a negative sign ifrt is a negative number. Given what it represents, massis always defined as a positive quantity, but temperaturemay or may not be so. When the absolute (Kelvin)rcmperature scale is used, temperature is never negativebecause the zero-kelvin reference has been defined asdre temperature at which a thermodynamic system has$e lowest possible energy. In the Celsius scale, on theother hand, an object may assume a temperature belowL1r above 0' C (defined as the freezing temperature ofpure water under standard atmospheric pressure).
A vector specifies both the magnitude and directionof a quantity. The speed of an object is a scalar, whereas;rs velocity is a vector. Starting in the next chapter andtroughout the succeeding chapters in the book, the:lectromagnetic quantities we will deal with the most.ne the electric and magnetic fields, E and H. These,md many other related quantities, are vectors. Vectornalysis provides the mathematical tools necessary for:rpressing and manipulating vector quantities in anefficient and convenient manner. To specify a vectorr three-dimensional space, it is necessary to specify its:L'r{nponents along each of the three dimensions. Severalfles of coordinate systems are used in the study of're!'tor quantities, the most common being the Cartesian:r rectangular), cylindrical, and spherical systems. A
particular coordinate system is usually chosen to bests;:t the geometry of the particular problem undercrosideration.
a l
f
Figure 2-1: Vector A : 64 has a magnitude A : lAland unit vector 6 : A/A.
Vector algebra governs the laws of addition,subtraction, and multiplication of vectors in any givencoordinate system. The rules of vector algebra andvector representation are the major topics heated inthis chapter. Vector calculus, which encompasses thelaws of differentiation and integration of vectors, is thesubject of Chapter 3.
2-1 Basic Laws of Vector Algebra
A vector A has s magnitude A : lAl and a directionspecified by a unit vector i:
A : 6 1 . { l : i A . (2.r)
The unit vector i has a magnitude of unity (lAl : 1),and its direction is given by
Figure 2-1 shows a graphical representation of thevector A as a straight line of length A with its tippointing in the direction of i.
^ A Aa: : - - : - . (2 .2)
IA I A
23

24 CHAPTER 2 VECTOR ALG
x(b) Components of A
Figure 2-2: Cartesian coordinate system: (a) base vectorsi, i, and 2, and (b) components of vector A.
In the Cartesian (or rectangular) coordinate systemshown in Fig. 2-2(a), the directions of the r, y,
and z coordinates are denoted by the three mutuallyperpendicular unit vectors i, i, and 2, which are calledthe base vectors. The vector A in Fig. 2-2(b) may berepresented as
A : i A , * j A r + i A z , (2.3)
where A, Ar-, and A. are the components of Aalong the x-, !-, and z-directions, respectively. The
component A, is equal to the perpendicular prolof A onto the z-axis, and similar definitions apA, and Ar. Ap'plication of thc $thagorean thfirst to the right triangle in the .r-y planc to expnhypotenuse A" in terms of A, and A' and thento the vertical right triangle with sides A, and .,hypotenuse A, gives the following expression Imagnitude of A:
A : l A l :
Since A is a nonnegative scalar, only the positirapplies. From Eq. (2.2), the unit vector 6 is give
iA, + jA, +2A,^ Aa : -
A
Occasionally, \rys shall use the shorthand nA: (Ar, Ay, Ar) to denote a vector with compA, Ay, and A, in a Cartesian coordinate systen
2-1.1 Equality of Two Vectors
Ttvo vectors A and B are said to be equal if theequal magnitudes and identical unit vectors. Tht
A : 6 4 - ? A , * 9 A r * 2 A ,
B : 6 4 : i & * i B n + 2 8 2 ,
t h e n A : B i f a n d o n l y I f A : B a n d i : 6 ,requires that A, : B* Ar: By, and A,Equality of nvo vectors does not necessarilythat they are identical; in Cartesian coordinatcdisplaced parallel vectors of equal magnitu<pointing in the same direction are equal, but tlidentical only if they lie on top of one another.
{ le?+Atr+A?.

2.1 BASIC LAWS OF VECTOR ALGEBRA 25GEBRA
[-bjectionrpply to
2-1.2 Vector Addition and SubtractionThe sum of two vectors A and B is a vector C given by
C : A * B : B + A . (2.7)
Graphically, vector addition is obtained by either theparallelogram rule or the head-to-tail rule, as illustratedin Fig. 2-3. With A and B drawn from the samepoint, while keeping their magnitudes and directionsunchanged, the vector C is the diagonal of theparallelogram found by A and B. With the head-to-tailrule, we may either add A to B or B to A. When A isdded to B, it is positioned so that its tail starts at the tipof B, again keeping its length and direction unchanged.The sum vector C starts at the tail of B and ends at thetip of A.
If A and B are given in a rectangular coordinatesystem by Eqs. (2.6a) and (2.6b), vector addition gives
C : A + B- (iA, * 'Ay + 2A) + (i& * iBy + 2Bz)- i(A, + &) + i(Ay + By) +i(Az + Bz). (2.8)
(b) Head-to-tail rule
Figure 2-3: Vector addition by (a) the parallelogram ruleand (b) the head-to-tail rule.
Subtraction of vector B from vector A is equivalent tothe addition of A to negative B. Thus,
D : A - B: A + ( - B )
: i(A, - B,'�) * '(Ay - Br) + i(Az - B).(2.9)
Graphically, the same rules used for vector addition arealso applicable to vector subtraction; the only differenceis that the arrowhead of (-B) is drawn on the oppositeend of the line segment representing the vector B (i.e.,the tail and head are interchanged).
2-1.3 Position and Distance VectorsIn a given coordinate system, the position vector of apoint P in space is the vector from the origin to P.Points P1 and P2 in Fig. 2-4 are located at (x1, yr,z)and (x2, !2, Zz), respectively. Their position vectors are
.-....>oPt.-...-,oPz
rresslnAz
for
ley
hus, if
(2.
(2
R r :
R z :
: irr * |yr +22t, Q.10a)
- *.x2 * jyz * 2zz, (2.10b)
x
Figure 2-4: Position vector R12 :Ffi2: Rz - Rr.

26 CHAPTER 2 VECTOR ALGEBR
where point O is the origin. Tbe distance vector fromP1 to P2 is defined as
J
Rrz: PrPz
: R z - R r
: i(rz -.rr) * j,Oz - y) * 2(zz - Zr), Q.LI)
and the distance d between Pr and P2 is equal to themagnitude of R12:
d : l R 1 2 l
: l(xz - x)2 * (yz - y)2 + (zz - z)2lt/2. (z.tz)
Note that the first subscript of R12 denotes the locationof the tail of vector R12 and the second subscript denotesthe location of its head, as shown inFig.2-4.
2-1.4 VectorMull ipl ication
Three types of products can occur in vector algebra.These are the simple, scalar (or dot), and vector (orcross) products.
Simple Product
Multiplication of a vector by a scalar is called a simpleproduct . The product of the vector A : 64 by a scalar kresults in a vector B whose magnitude is tA and whosedirection is the same as that of A. That is.
B: ikA: i ( fA,) +i(kAy) +2(kA). (2.13)
Scalar or Dot Product
T\e scalar (or dot) product of two vectors A ard Idenoted by A.B and pronounced "A dot 8," is defi&geomeftically as the product of the magnitude of one rthe vectors and the projection of the other vector onlthe first one, or vice versa. Thus.
A 'B : AB cos|as, Q. l4)
where 0p is the angle between A and B, as showin Fig. 2-5. The scalar product of two vectors yielca scalar whose magnitude is less than or equal tthe products of the magnitudes of the two vectol(equality holds when gas : 0) and whose sigis positive if 090o < 0epvectors are orthogonal. The dot product of tworthogonal vectors is zero. The quantity Acos01
^ /
//
Ado" R
(a)
/f
^ / B,-Z-
,' 9ns
(b)
Figure 2-5: The angle0l6 is the angle between A and B,measured from A to B between veclor tails. The dotproduct is positive if 0 < 9nn < 90o, as in (a), and itis negative if 90o < 0tn < 180', as in (b).

2-I BASIC LAWS OF VECTOR ALGEBRA 27;EBRA
and B,definedI one ofor onto
is the component of A along B and is equal tothe projectian of vector A along the direction ofvec0or B, and similarly Bcos0as is the componentof B along A.
If A : (A,, Ay, A.) and B : (&, By, Q), then
A.B : ( *A,+ iAy + iA) . (?B,+ jBy+tB) . (2 .15)
Since the base vectors i, i, and i are each orthogonalto the other two, it follows that
Use of Eqs. (2.16a) and (2.16b) in Eq. (2.I5) leads to
A . B : A , B , + A y B y + A r B r .
Uector 01 Cross Product
The vector (or cross) product of two vectors A and B,denoted by A x B and pronounced "A cross 8," yieldsa vector defined as
A x B - f i A B s i n 9 4 s , Q . 2 2 )
where gas is the angle between A and B,measuredfromthe tail of A to the tail of B, and ff is a unit vector normalto the plane containing A and B. The magnitude of thecross product is equal to the area of the parallelogramdefined by the two vectors, as illustrated in Fig. 2-6(a),and its direction is specified by fi in accordance with the
shown; yieldsqual tovectors;e signrtive ifhe twoof twocos 013
II
IIIIIIII
and B, Ire dot Iand it I
__J
(2.r7)
The dot product obeys both the commutative anddistributive properties of multiplication; that is,
A.B : 3 .4 (commutative property), (2.18a)
{.(B + C) : A.B + A.C (distributive property).
(2.18b)
The dot product of a vector with itself gives
A ' A : l \ l 2 : A 2 (2.te)
It the vector A is defined in a given coordinate system,:is magnitude A can be determined from
A: lAl : i l lT. (2.20)
-.'-lso, if vectors A and B are specified in a given: rcrdinate system, then the smaller angle between them,:rs, cofl be determined from
o.ta:*r-' f.=3+.-l .L V A . A V B . B I
(2.2r)
(2.r6a)
(2.r6b)
i . i - y . i : 2 . 2 : 1 ,f ; . i : g . i : 2 . i : 0 .
A x B = f t A B s i n O a g
(a) Cross product
A x B
(b) Right-hand rule
Figure 2-6: Cross product A x B points in the direction ff,which is perpendicular to the plane containing A and Band defined by the righrhand rule.

following right-hand rule [Fig.2-6(b)]: the directionof i points along the right thumb when the fingers roratefrodllrr A to B Orcugh the angle ?aB.We notc that, sfurcefi is perpendicular to the plane containing A and B, itis also perpendicular to the vectors A and B.
The cross product is anticommutative, meaning that
A x B: -B x A (anticommutative). (2.23)
This property can be verified by rotating the fingers ofthe right hand from B to A through the angle 0a3. Otherproperties of the cross product include
A x (B +C):A x B *A x C (disributive), (2.24a)
A x A : 0 . (2.24b)
From the definition of the cross product given byF4.. Q.22), it is easy to verify that the base vectors i,i, and 2 of the Cartesian coordinate system obey thefollowing righrhand cyclic relations:
i x i - 2 , i x 2 : i , 2 x i : 9 . e . 2 5 )
Note the cyclic order (xyzxle...). Also,
i x i : 9 x 9 : 2 x 2 - 0 . ( 2 . 2 6 )
If A : (A* Ay, A.) and B : (&, Br, Br), use of Eqs.(2.25) and (2.26) leads to
A x B - (iA, * iAy + eA)x (iB, *!By + iBz):*(AyB, - ArBy) + g(AzB" - A,Br)
+ 2(A,By - ArB,). (2.27)
The cyclical form of the result given by Eq. (2.27)allows us to express the cross product in the form ofa determinant:
CHAPTER 2 VECTOR
f , Vectorc and AnglesIn Cartesian coordinates, vector A is directed
the origin to point P1(2,3,3), and vector B is difrom Pr to point P2(1, -2,2). Find(a) vector A, its magnitude A, and unit vector i.(b) the angle that A makes with the y-axis,(c) vector B,(d) the angle between A and B, and(e) the perpendicular distance from the origi
vector B.
the distanceshown in Fig.
A : i 2 + j 3 + 2 3 ,A : l A l : J 2 2 + y + y : J ? 2 .^ Aa:tA: ( i2+i3 + l r / "m..
(b) The angle B between A and the y-axis is obtaifrom
A . 9 : l A l c o s p ,
Solution: (a) Vector A is given byfrom 0(0,0,0) to P1(2, 3, 3) asThus.
/
P{2,3,3)
Figure 2-7: Geometry for Example 2-1.
x yA, Ay
B, By
,.AzBz
A x B : (2.28)

]EBRA 2-I BASIC LAWS OF VECTOR ALGEBRA 29
d : cos-r f|_i\ = cos-r f+) = 50.2o.' \ A / \ ' ' / 2 2 /
(c)
B : i ( l -2\ +3,e2 - 3) + 2(2- 3) : - i * i5 - 2.
(d )
- _r r A.B I _, | ( -2 - 15 -2. l : 145.1o.i: cos '
Lfnnql : cos
L-WA I
te) The perpendicular distance between the origin and
vector B is the distance I O Pzl shown in Fig. 2-7. From
right triangle O P1P3,
l : l A l s i n ( 1 8 0 " - 0 ): rE. sin(180' - 145.1") :2.68. I
2-1.5 Scalar and Vectol Ttiple Products
When three vectors are multiplied, not all combinationsof dot and cross products are meaningful. For example,the product
A x ( B . C )
does not make sense because B'C gives a scalar, and
the cross product of the vector A with a scalar is not
defined under the rules of vector algebra. Other than the
product of the form A(B'C), the only two meaningful
products of three vectors are the scalar triple product
and the vector triple product.
Scalar Triple Product
The dot product of a vector with the cross product of
two other vectors is called a scalar triple product, so
named because the result is a scalar. A scalar triple
product obeys the following cyclic order:
A.(B x C) = B'(C x A) : C'(A x B). (2.29)
The equalities hold as long as the cyclic order(ABCABC...) is preserved. The scalar triple product
of vectors A : (A' Ay, Ar), B : (&, Br, Br), and
C : (C' Cy, Cr) can be written in the form of a 3 x 3
determinant:
ed fromdirected
r a ,
rigin to
e vector:ig. 2-7.
obtained
---+oPt
ca@
EXERCISE 2.1 Find the distance vector betweenP1(1,2,3) and Pz(-L, -2,3) in Cartesian coordinates.
Ans. Ffr: -t;2 - y4. (See O)
EXERCfSE 2.2 Find the angle 0 between vectors Aand B of Example 2-1 using the cross product betweenthem.
.{ns. 0 - 145.1". (See ($)
EXERCISE 2.3 Find the angle that vector B ofExample 2-1 makes with the e-axis.
.\ns. 101.1". (See C)
A ' (B x C) :
The validity of Eqs. (2.29) and (2.30) can be verified byexpanding A, B, and C in component form and carryingout the multiplications.
A, Ay AzB, By Bzc, cy cz
(2.30)

30 CHAPTER 2 VECTOR ALGEBR
llector Triple Product
The vector triple product involves the cross product ofa vector with the cross product of two others, such as
REVIEW OUESTIONS
Q2.1 When are two vectors equal and when are thridentical?
Q2.2 When is the position vector of a point identicrto the distance vector between two points?
Q2.3 tf A.B : 0, whar is /aB?
Q2.4 If A x B : 0, what is dap?
Q2.5 Is A(B.C) a vector triple producr?
Q2.6 If A.B : A.C, does it follow thar B - C?
2-Z Orthogonal Coordinate SystemsIn electromagnetics, the physical quantities we deawith are, in general, functions of space and timeA three-dimensional coordinate system allows us truniquely specify the location of a point in space othe direction of a vector quantity. Coordinate systernmay be orthogonal or nonorthogonal. An orthogona,coordinate system is one whose coordinates are munr.ally perpendicular, whereas in a nonorthogonal systennot all three coordinates are mutually perpendicularNonorthogonal systems are very specialized and seldomused in solving practical problems. Many orthogonalcoordinate systems have been devised, but the modstandard and commonly used are
o the Cartesian (otherwise called the rectangular)coordinate system,
o the cylindrical coordinate system, ando the spherical coordinate system.
Why do we need more than one coordinate system?Whereas a point in space has the same location andan object has the same shape regardless of whichspecific coordinate system is used to describe them. thesolution of a given practical problem can be grcatly
A x ( B x C ) . (2.3r)Since each cross product yields a vector, the result of avector triple product is also a vector. The vector tripleproduct does not, in general, obey the associative law.That is,
Ax (B xC)+ (Ax B) x C, (2 .32)
which means that it is important to specify which crossmultiplication is to be performed first. By expandingthe vectors A, B, and C in component form, it can beshown that
A x (B x C) - B(A.C) - C(A.B), (2.33)
which sometimes is known as the ,,bac-cab,, rule.
Erample 2-2 Vector Triple product
Given A : i-9* 22, B - 9+2, and C : -fr2+i3,find (A x B) x C and compare it with A x (B x C).Solution
A x B :
and
( A x B ) x C :
: - * 3 - v + tx y zl - l 20 1 1
x y- 3 - 1- 2 0
zI3
: - i3 +y7 -22.
A similar procedure gives A x (B x C) = *2 + y4 + i.The fact that the results of two vector triple productsare different is a demonstration of the inequality statedin Eq. (2.32). r

2.2 ORTTIOGONAL COORDINATE SYSTEMS 3 l
c?
re they
bntical
;e dealI time.; u s t o)ace oriystemsogonal:mutu-systemdicular.seldomrogonale most
ngular)
)'stem?on andwhich
em, thegreatly
facilitated by the proper choice of a coordinate systemthat best fits the geometry of the problem. Hence, in thefollowing subsections we shall examine the propertiesof each of the aforementioned orthogonal systems, andin Section 2-3 we shall describe how a point or vectormay be transformed from one coordinate system toanother.
2-2.1 Gartesian GoordinatesThe Cartesian coordinate system was introduced inSection 2-1, where we used it to illustrate many of thelaws of vector algebra. In lieu of repeating these lawsfor the Cartesian system, we have summarized themtor easy access in Thble 2-1. ln differential calculus,u'e often work with differential quantities. Differentiallength in Canesian coordinates is a vector (Fig. 2-8)defined as
dl - *.dlx *9 dl, +|dlz : *.dx +9 dy *2d2, (2.34)
v'here dl, : dx is a differential length along i, andsimilar definitions apply to dl, : dy and dlr: fl7.
Figure 2-8: DifferentialCartesian coordinates.
length, area, and volume in
A differential surface ar:ea ds is a vector quantity witha magnitude ds equal to the product of two differentiallengths (such as dl, anddlr), and its direction is denotedby a unit vector along the third direction (such as i).Thus, for a differential area in the y-z plane,
ds,:*.dlydlz:?dy dz (y-z plane), (2.35a\
with the subscript of ds denoting its direction. Similarly,
ds, - j dx dz (x-z plane), (2.35b)
dsr: f,, dx dy (-r-y plane) . (2.35c)
A differential volume is equal to the product of all threedifferential lengths:
dv : dx dy dz. (2.36)
2-2.2 Cylindrical Goordinates
A cylindrical coordinate system is useful for solvingproblems having cylindrical symmetry such as cal-culating the capacitance per unit length of a coaxialtransmission line. The location of a point in spaceis uniquely defined by three variables, r, Q, and 7,as shown in Fig. 2-9. The coordinate r is the radialdistance in the x-y plane, f is the azimuth anglemeasured from the positive x-axis, and z is aspreviously defined in the Cartesian coordinate system.Their ranges are 0 < r < oo, 0 < 0 < 2t, and-oo < e < oo. Point P(r1,0t,2) in Fig. 2-9 islocated at the intersection of three surfaces. These arethe cylindrical surface defined by r : 11, the verticalhalf-plane defined by Q : @1 (which extends outwardlyfrom the zraxis), and the horizontal plane defined byz: zt. The mutually perpendicular base vectors are i,
fr, and 2, with i pointing away from the origin along r,
@ pointing in a direction tangential to the cylindricalsurface, and 2 pointing along the vertical. Unlike theCartesian system, in which the base vectors i, f, and 2are independent of the location of P, in the cylindricalsystem both i and f are functions of @.
aE=$dxdz
d i *=Q414,

32CHAPTER 2 VECTOR ALGI
Thble 2-1: Summary of vector relations.
fo* + 6ee +6t{ lAr*+err+,1, j
i A , + 9 e " + 2 e i t " +$ea +te,Magnitude of A, lAl -
3q ] - i y t i -2q ,for P(x1 , yl, zt)
i r t * Lzt,for P(r1, h, z)
Base vectors properties = i ' i : 2 ' 2 : 1= 9 . 2 : 2 . i : 0
* . x j : 2
i x 2 : i2 x i : f
= A ' A = i ' 2 : l= A . r : i . i : o
t X t p = 7
6 x 2 : i:
Z X f : QDot product, A .B =
&+ AyB,_ + AzBz A , B , * A O B O + A z B z
CrossproductrAxB-i i i '
Ax Ay A2Bx B), Bz
t A iA, Ao AzBr 86 Bz
n a dAp 46 AqBp Be 86
* .dx *9 dy + |az i d r i e r r t t + i a z f i .an +6nae ++6n"^ine aoDifrerential surface areas ds, =f;6r 4,ds, =j dx dzd s r - i d x d y
ds, - ?r dQ dzd s 6 = $ d r d zds, * ir dr dS
dsp : fr.R2 sin d de dOdse :0R sin1 dR d6
: $ n a n a eDifferential volume. dy - dx dy da r d r d Q d z R2 sin d dR d0 d6
Coordinates
fo f (Rr , i l ,Q)
n x a : fA x 4 : nf x n : e
AnBn - t AoBe *
R . n : e . 6 : e . 6 = |R . e : A . 6 : d . n : e
The base unit vectors obey the following righrhandcyclic relations:
and l ike a l l u-n i t vectors, i . i : A.A : i .A:1, andi x i - 6 " 6 : t x i : 0 .
In cylindrical coordinates, a vector is expressed as
I :6 lA l - ?A, +0Ao +eA, ,
where A:, AO, and A, are the components of A althe i-, $-, and 2-directions. The magnitude of Aobtained by applying E4,. (2.20), which gives
lAl : d4{a:
The position vector dF shown incomponents along r and z only. Thus.
R r : O F : i r r * 2 2 r . (2.t
(2."
Fig. 2-9 |
(2.38)
V e 7 + e $ + e ! .

2-2 ORTTIOGONAL COORDINATE SYSTEMS 33
l
Q = 0t plane
Figure 2-9: Point P(n, Qt,zr) in cylindrical coordinates; rl is the radial distance from the origin in the x-y plane, @1 is the
"n!t" in the x-y plane measured from the x-axis toward the y-axis, and zr is the vertical distance from the x-y plane.
\ alongr f A i s
(2.39\
l-9 has
(2.40)
The dependence of Rr on @r is implicit through thedependence of i on @1. Hence, when using Eq' (2.40)t,: denote the position vector of point P(rr, Qt, zr), it iscecessary to specify that i is at rf1.
Figure 2-10 shows a differential volume element in
n'lindrical coordinates. The differential lengths along i,
J. and 2 are
dl, : fl7, dI5 - r dQ, dlr: fl7.
\ote that the differential length along f is r dQ, not just
;g. The differential length dl in cylindrical coordinatess given by
dt : idt, +Q dta +idlz : i dr +Qr dQ +2d2. (2.42)
\s was stated previously for the Cartesian coordinate
t,stem, the product of any pair of differential lengths is
equal to the magnitude of a vector differential surface
area with a surface normal pointing along the direction
of the third coordinate. Thus,
ds,:f dl5 dlr: ir dQ dz (d-z cylindrical surface),
(2.43a)
(r*z plane), (2.43b)
(r-@ plane). (2.43c)
The differential volume is the product of the three
differential lengths,
dv : dl, dla dlz: r dr dQ dz. Q.44)
The preceding properties of the cylindrical coordinate
system are summarized in Table 2-1.
(2.4r)ds6: $ aI, dl, : $ dr dz
dsr- f,,d\, dl6: ir dr dQ

34CHAPTER 2 VECTOR ALGEBRA
dsq=Qdrdz
= r d r d Q d z
d s , = f r d Q d z
Figure 2-10: Differential areas and volume in cylindricalcoordinates.
Distance Uectorin Cylindrical Coordinates
Find an expression for the unit vector of vector Ashown in Fig. 2-l I in cylindrical coordinates.Solution: In triangle Op1p2,
P{0,0, h)
Figure 2-11: Geometry of Example 2_3.
+A.Hence,
----->A - O P 2 -
and
We note that the expression forof/6. That is, all vectors from point
the circle defined by r - rs in the .r_y plane are equalin the cylindrical coordinate system. The ambiguity canbe. eliminated by specifying that A passes through apoint whose Q:6o. I
Find the area of a cylindrical surface described bvr :5, 30. .0 < 60o, and 0 < z < 3 (Fig. 2_lZ).
S-olution: The prescribed surface is shown inFig.2-12.Use of Eq. (2.43a) for a surface element with constantr gives
f 6 0 o f t , _ . l o / 3 1 3 5 tS : r l d O I d z : S e l ' , 1 " = _JO:zo Jz=a
' l r1o - lo 2
Note that S had to be converted to radians beforeevaluating the integration limits. r
EXERCISE 2.4 A circular cylinder of radius r : 5 cmis concentric with the z-axis and extends between
----+oPz
--+oPr
.---->oPr : iro - 2h,
^ A8 : -
tAl
AP1
is independentto any point on

2-2 ORT}IOGONAL COORDINATE SYSTEMS 35
x
Figure 2-12: Cylindrical surface of Example 2-4.
0 = 0 tconicalsurface
x
Figure 2-13: Pointnates.
P(R1,fi, dr) in spherical coordi-equal
ry canrugh a
ed byr) ., 2 - r 2 .rnstant
before
: : *3 cm and z : 3 cm. Use 4. Q.44) to find the:1'linder's volume.
\ns. 471.2 cm1. (See Q;
2-2.3 Spherical Coordinates
: the spherical coordinate system, the location of apint in space is uniquely specified by the variables R,:. and @, as shown in Fig. 2-13. The coordinate R,rtich sometimes is called the range coordinate,:xcribes a sphere of radius R centered at the origin.k zenith angle 0 is measured from the positive z-axisiod it describes a conical surface with its apex at the:ngin, and the azimuth angle @ is the same as in the:.lindrical coordinate system. The ranges of R,0, and Qrr: 0 < R <^oo^, O S^A I n, and O < 0 < 2tr.Thera:e vectors R, 0, and @ obey the following righfhand:,;lic relations:
A vector with components Ap, A9, and 46 is writtenas
A: a lA l : f tAn +Ae, +6A0,
and its magnitude is given by
lA l : f f i 'A :
The position vector of point P(Rr, &, Q) is simply
R r : o P - R R 1 ,
(2.46)
(2.47)
(2,48)
while keeping in mind that R. is implicitly dependent onf i and Q1.
As shown in Fig. 2-14, the differential lengths alongfi.,6, and fr are
d l p - d R , d l s - R d 0 , d l 6 : R s i n O d O . Q . 4 9 )
V A'* + ej + e'�r.
0 x 4 : P , fr x fi.: r0.

36 CHAP]ER 2 VECTOR ALGEBRA
dtt= R2 sin0 dR d0 dd
x
Figure 2-14: Differential volume in spherical coordi-nates.
Hence, the expressions for the vector differential lengthdl, the vector differential surface ds, and the differentialvolume dv are
dt: ft dtn *e ab +6 aU: f i dR +enae+ lns i nea6 ,
dsp : fitdtt dtr: f,.R2 sinl d0 d6
(0-f spherical surface), (2.50b)
dse:6 at^ a4:6R r ing dR dO(R-{ conical surface), (2.50c)
dsq :$ at* a6 : $n an ae (R-€ plane), (2.50d)dv: dlR dle dlo: R2 sin e dR de dQ. (2.50e)
These relations are summarized in Table 2-1.
x
Figure 2-15: Spherical strip of Example 2-5.
frainplg"?1 . $urface Area in Spherlcat Coordinates
The spherical srip shown in Fig. 2-15 is a section ofa sphere of radius 3 cm. Find the area of the strip.
Solution: Use of Eq. (2.50b) for the area of an elementalspherical area with constant radius R gives
(2.50a)
- 160' f2oS : R 2 / s i n e d o I d e
Je=3s Jo:o160 " t 2n
:9(- .orA) l ro. d lo (cm2)
: l8z(cos30' - cos60") - 20.7 cm2. I

GEBRA 2-3 TRANSFORMATIONS BETWEEN COORDINATE SYSTEMS 37
ates
;tion ofrip.
:mental
Charge ln a Sphere
A sphere of radius 2 cm contains a volume charge&nsity 6, given by
Pv:4cos2 0 (c/m3).
End the total charge p contained in the sphere.
Solutionf
e : I p " d vJ v
f 21t f it 72x10-':
J^oJr . , l *o (4cos2o)R2sind dRdo dO
: o lo'" l" (+) l:""
' sine cos2 o de do
:2 , ,o-u ['" /-afg) l" o,3 J o \ 3 l l o
:1 , rc-u ['" do9 J o
:t'!n x 1o-6 - 44.68 (trc).9
\ote that the limits on R were converted to meters priorto evaluating the integral on R. r
2-3 Transformations between Coordinate$ystems
The position of a given point in space is invariant withrspect to the choice of coordinate system. That is,ns location is the same inespective of which specific:oordinate system is used to represent it. The same istnre for vectors. In this section, we shall establish thenelations between the variableS (r, ), z) of the Cartesians)-stem, (r, Q, z) of the cylindrical system, and (R, 0, @),ri the spherical system. These relations will then beused to transform vectors expressed in any one of the$ree systems into vectors expressed in any of the otherrro.
Figure 2-16: Intenelationships between Cartesiancoordinates (x, y, z) and cylindrical coordinates (r, Q, z).
2-3.1 Gartesian to Cylindrical Transformati0ns
Point P in Fig. 2-16 has Cartesian coordinates (x, y, z)and cylindrical coordinates (r, d, z). Both systems sharethe coordinate e, and the relations between the other twopairs of coordinates can be obtained from the geometryin Fig. 2-16. They are
+f3-7--ir - \ / x ' + ) - - , d : t a n - l ( l ) , Q . s l ). \ x /
and the inverse relations are
l : r c o s d , y : r s i n d . Q . 5 2 )
Next, with the help of Fig. 2-17, which shows thedirections of the unit vectors i, i, i, and @ in the .r-yplane, we obtain the following relations:
i . i : cosrp, i . i : s in d, Q.53a)
O ' * : - s in @, O '9 ' : cos @, (2.53b)
To express i in terms of i and i, let us write i as
i : i a * j b , (2.s4)

CHAPTER 2 VECTOR
Figure 2-17: Intenelationships between base(i,9) and (i, e).
where a and b are unknown transformation coefficients.The dot product i.i gives
n . i - i . i c * 9 . * b : o . (2.ss)
into (i,l), and vice versa, they can also be usedtransform the components of a vector expressed in eiticoordinae system into its corresponding comlexpressed in the other system. For example, aA : iA, * |Ay + r,Az in Cartesian coordi'nates canhansformcd into A - iA, + 6Ao + iAz in cylinrcoordinares by applying Eqs. (2.56a) anO (Z.SOU).
Repetition of the procedure for f leads to
i : i cosd* i s in@. (2 .56a )
a=-f; sin { * i cos @. (2.56b)
ls,
A,: A* cosd * A, sin@, (2.5ga)Ao= -Ars ind * ArcosQ, (2.5gb)
and, converselv.
A,: A, cos@ - A4 sin@, (2.59a)Ay : A, sin rd * A6 cos Q . (Z.Sgb)
The transformation relations given in this andfollowing two subsections are summarized in Thble
Example 2-7 Cartesian to Cylindrical TransformalionsGiven point P1(3, -4,3) and vectorA : *2_g3+i
defined in Cartesian coordinates, express p1 and Acylindrical coordinates and evaluate A at &.S_olution: For point P1, x :3, ! : _4, and 3 :Using Eq. (2.51), we have
r : f f 112 -5 , d : t an - r i : - r r . r "=
3d z lemains unchanged. Hence, pr : pr(5, 306.9.,in cylindrical coordinates.
For vector A : iA, + 6Ao + AAz in cylindcoordinates, its components can be determinedapplying Eqs. (2.58a) and (2.58b):
A, : A,cosr0 * .4, sin Q : 2cos/ _ 3sin4,Ao: -A ' s ind * Arcos@ : -2s in Q -3cose,
Az :4 '
Comparison of Eq. (2.55) wirh Eq. (2.53a) leads to theconclusion that a : cos@. Similarly, application of thedot product i .! to Eq. (2.54) gives a : sin d. Hence.
The third base vector i is the same in bothcoordinate systems. By solving Eqs. (2.56a) and (2.56b)simultaneously for i and i, ,"
-obtain the following
inverse relations:
i : i c o s Q - 6 s i n | , ( 2 . 5 7 a )
i : i s i nO+Acos / . (2 .57b \
The relations given by Eqs. (2.56a) to (2.57b) are notonly useful for transforming the base vectors (i, i)

GEB 2-3 TRANSFORMAIfONS BETWEEN COORDINATE SYSTEMS 39
usedrn el
as can
,b).
'- lr ) |, I, ) l
I
andable 2-
nalions
-93+urd A
Table 2-2: Coordinate transformation relations.
Tbansformation Coordinate Variables Unit Vectors Vector Components
Carteslan tocylindrtcal
+fV7-'77 - i / x . * ! .
4 =tan-r1y1x1i : * c o s C * f s i n /' l ^ .
9 : - x s m o * y c o s o2 : 2
Ar : Ax cosd * A, sin@Ao = -4, sind * ArcosSA z = A z
Cylindrical toCartesian
x : r e o s 0y : r s i n d
i : icosd -Osin|
i : i s i nd * f cos@t : 2
Ar: A, cosd - A6sinQAy : A, s ind * AqcosQA . : A ,
Cartesian tospherical
R: {/Flf al
d : tan-r[ {/7T7/rl
O: tan - t ( y / x )
R : i s i n g c o s d* isin0 sind + icos9
6 : i cosdcosd* 9 c o s 0 s i n @ - i s i n 0
f r : - i s in4* f cos@
A R : A r s i n 0 c o s @* A, sinO sind * Arcos?
A e : A t c o s 0 c o s @* A r c o s d s i n @ - A . s i n 0
Ao: -A" s ind * AncosQSpherical to
Cartesianx : R s i n 0 c o s @
) : R s i n d s i n @
z = R c o s 0
i : R s i n d c o s d+6cos0cos@ - f rs in@
^ AY : K s r n d s l n @
* 0 c o s d s i n d * $ c o s Q2 : R . c o s d - 0 s i n d
A' : AR sind cos d* AB cos 0 cos @ - A5 sinQ
A y : A n s i n O s i n {* Aecos9 s ind * AqcosQ
Az: An cosd - A6 sin9Cylindrical to
sphericalR: I7T7'0 : tan-r (r /z)Q : Q
f r , : is in0 * icosd6 : icos0 - 2s inga :a
A R : A r s i n d * A . c o s gAe : A, cosO - A. s in0A d : A o
Spherical tocylindrical
r : R s i n d
Q : Qz : Rcosd
i : Rs ing +6cosg6 : e2 : f r . c o s d - 6 s i n g
A, : AR sin 0 * As cos9A Q : A QAz: Ancos0 - Ap s inO
l c _
06.9",
ined
, .
:os @,
Hence,
A: i (2cos@ - 3s in O> -6<Zs in@ * 3cosQ) +24.
{t point P, Q:306.9o, which gives
A : i3.60 - 00.20 + 24. r
2-3.2 Cartesian to Spherical TranslormationsFrom Fig. 2-18, we obtain the following relationsbetween the Cartesian coordinates (-r, ), z) and thespherical coordinates (R, 0, Q):
R: {/7T} + r} ,
e:tan-, 1ry)d : tan-t (I) ,
(2.60a)
(2.60b)
(2.60c)

N CHAPTER 2 VECTOR ALGEBRA
these expressions for a and b inF"q. (2.62) and replacingi with Eq. (2.56a), we have
A similar procedure can be followed to obtain thefollowing expression for 6:
and the converse relations are
(2.6ra)
(2.61b)
(2.6rc)
The unit vector fi. Ues in the i-2 plane. Hence, it can be
expressed as a linear combination of i and 2 as follows:
fi,= ia *?.b, (2.62)
where a and b are transformation coefficients. Since iand 2 are mutually perpendicular,
f i . . i : a,
fr..e: o.From Fig. 2-18, the angle between fi. and i is thecomplement of 0 and that between fi. and 2 is 0. Hence,a : fi, .i : sin 0 and b: fi. . 2 : cos 9. Upon inserting
x : R s i n d c o s @ ,
) = R s i n d s i n { ,
z : R c o s 9 .
(2.63a)
(2.63b)
7
V/\
) =;ffi7-
tT-0)z = R c o s d
x = r C o S Q
Figure 2-18: Intenelationships between (r, y, z) and( R , 0 , 0 ) .
f;, : isin0cos{ *isinO sinp * icosd. (2.6aa)
0 : icos0cosd *icosd sind - 2sin0, (2.64b)
i : f i . s i n 0cosQ*6cosdcos@- $s inQ, e .
i : f i .s ind s in@ *6cos0 s inrd *$cos@, (2
i : f i .cos 0 -Osinl .
and the expression for f is given by Eq. (2.56b) as
6: -*s ind * icos,p. (2.64c)
Equations (2.6ad through (2.64c) can be solvedsimultaneously to give the following expressions for(i, i, 2) in terms of 1fi.,6, fr;:
Equations (2.6ail to (2.65c) can also be used totransform (Ar, Ay, Ar) of vector A into its sphericalcomponents (An, Ae, A4), and vice versa, by replacing(i, i, i, n,0, C) with (A' Ay, A7, AR, A0,A4), respec-tively.
, t r r + t ' ' r :
Examptp 2i8 Cartesian to Spherical Transformation
Express vector A : i(x * y) + 90 - x) * iz nspherical coordinates.
Solution: Using the transformation relation for A1given in Table 2-2, we have
An : A,sin0 cos Q * Aysin g sin@ 1 A. cos0- (x * y) s inO cos@ * (y - x) s in0 sin@ * z

JEBRA 2.3 TRANSFORMATIONS BETWEEN COORDINATE SYSTEMS 4 l
Using the expressions for x, ), and z given by
F4. (2.61e), we have
An : (R sin0 cos Q + Rsin0 sinrd) sin0 cos@
* (Rsin0s in{-Rsindcost ' )s in0s in Q + Rcos20
= R sin20 (cos2 d + sin2d) + ncos2 g
= R s i n 2 0 + R c o s 2 9 : . R .
Similarly,
A6 : (x* ) )cos 0 cosQ+ 0 - .x) cos0 s in@ - z s in0,
A4 = -(x * y) sin Q + 0 - x)cosf,
and following the procedure used with Ap, we obtainthe results
A e : 0 ,
Ao : -R sin 0'
Hence,
A - f i .AR +0e, +,Aa: f iR -frRsine. r
2-3.3 Gylindrical to Spherical Transformations
Transformations between cylindrical and spherical coor-
dinates can be realized by combining the transformationrclations of the preceding two subsections. The resultsare given inTable 2-2.
2-3.4 Oistance between Two Points
In Cartesian coordinates, the distance d between twopoints P1(xr, )r, zr) and P2(x2, !2, zz) is given byEq. (2.12) as
d : lR12 l:l(xz - xt\z * (yz - y)2 + (2, - zt)'l '/z. Q.ae)
Upon using Eq. (2.52)coordinates of Pr andequivalents, we have
4:l lzcosfi - r l cos@1)2
* (rzsinQz- rl sin@1)2 * (zz - r)'f' ' '
: 1fi, + rl - 2r s2 cos(Q2 - Q ) + {2, - z )'f' /'
(cylindrical). (2.67)
A similar transformation using Eqs. (2.61a-c) leads toan expression for d in terms of the spherical coordinatesof Pr and Pz:
a: {n2, + R? - 2R1R2[cos 02eos01
* sin 91 sin d2 cos(@, - Q))l'/'(spherical). (2.68)
REVIEW OUESTIONS
Q2.7 Why do we use more than one coordinatesystem?
Q2.8 Why is it that the base vectors (i, f,2) areindependent of the location of a point, but i and f arenot?
Q2.9 What are the cyclic relations for the base vectorsin (a) Cartesian coordinates, (b) cylindrical coordinates,and (c) spherical coordinates?
Q2.10 How is the position vector of a point incylindrical coordinates related to its position vector inspherical coordinates?
toP2
convert the Cartesianinto their cvlindrical
2.64a)
rin the
"2.64b)
) a s
solvedons for
used tophericalplacing
respec-
for Ap
(2.
(2.
t )
rtion
+ 2 z n

42 TECHNOLOGY BRTEF: GI,OBAL POSTNONING SYST]
Global Positioning System
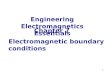
The Global Positioning System (GpS), initiallydeveloped in the 1980s by the U.S. Departmentof Defense as a navigation tool for military use,has evolved into a system with numerous civilianapplications, including vehicle tracking, aircraftnavigation, map displays in automobiles, andtopographic mapping. The overall GpS is comprisedof three segments. The space segment consistsof 24 satellites (A), each circling Earth every12 hours at an orbital altitude of about 12,00a)miles and transmitting continuous coded timesignals. The user segment consists of hand-heldor vehicle-mounted receivers that determine theirown locations by receiving and processing multiplesatellite signals. The third segment is a network offive ground stations, distributed around the world.
that monitor the satellites and provide them wlupdates on their precise orbital information. Gdprovides a location inaccuracy of about 30 m,horizontally and vertically, but it can be improvwithin 1 m by ditferential GPS. (See finat
Principle of 0peration
The triangulation technique allows thetion of the location (xo, yo,eo) of any object inspace from knowledge of the distancas d1, d2,d3 between that object and three otherpoints in space of known locations (xr,yr,zrl(xt, yz, zl). In GPS, the distances are establislby measuring the times it takes the signals

ffCfntOLOGY BRIEF: GLOBAL POSITIONING SYSTEM 43
nemion.0 f f i ,proved
ct in1, , d2 ,
- r r . zr )tablislQnals
travel from the satellites to the GPS receivers,ad then multiplying them by the speed of light; = 3 x 108 m/s. Time synchronization is achieved by'sing atomic clocks. The satellites use very preciseCocks, accurateto3 nanoseconds (3 x lO-s s), but;eceivers use less accurate, inexpensive, ordinary,-lp;tle clocks. To correct for the time error of a GPSeeiver, a signalfrom a fourth satellite is needed.
The GPS receiver of the automobile in (B) is atdstances d1 lo da from the GPS satellites. Eachsatellite sends a message identifying its orbital:oordinates (xr,yr,zr) for satellite 1, and so onbr the other satellites, together with a binary-coded sequence common to allsatellites. The GPSEceiver generates the same binary sequence, and1 comparing its code with the one received fromElellite 1, it determines the time 11 corresponding
to travel time overthe distance dr. A similar processappfies,to satellites 2to 4,leading to four equations:
d l :@1- ro )2 * ( y r - yd2+(z r -2 i l 2 =c [ ( r r i t d l2
4 : @, - xo)2 * (yz - yd2 + (zz - zo)2 : cIQz* to)12
4 : (*, - ro)2* (yr - yo\2 + (zz - zo)2: c[(b + h)f
4 : @u - xa)z * (yn - yd2 + (zt - zo)2 : c[(tq * til]2
The four satellites report their coordinates(xr,yt,zr) to (xq,yq,z+) to the GPS receiver, andthe time delays \ to ta are measured directly by it.The unknowns are (xo, yo,3s), the coordinates ofthe GPS receiver, and the time offset of its clock16. Simultaneous solution of the four equationsprovides the desired location information.
Dilferential GPS
The 30-m GPS position inaccuracy is attributed toseveral factors, including time-delay errors (due tothe difference between the speed of light and theactual signalspeed in the troposphere) that dependon the receiver's location on Earth, delays due tosignal reflections by tall buildings, and satellites'locations misreporting errors. Differential GPS, orDGPS, uses a stationary reference receiver at alocation with known coordinates. By calculating thedifference between its location on the basis of theGPS estimate and its true location, the referencereceiver establishes coordinate correction factorsand transmits them to all DGPS receivers inthe area. Application of the correction informationusually reduces the location inaccuracy down toabout 1 m.

EXERCfSE 2.5 Point P(2r8, r /3, -2) is given in cylin-drical coordinates. Express P in spherical coordinates.
Ans. P(4,2r/3,r/3). (See O)
EXERCISE 2.6 Transform vector
A : i ( x + y ) * i 0 - x ) + 2 2
from Cartesian to cylindrical coordinates.
Ans. A : ir - $r +?,2. (See O)
CHAPTER HIGHLIGHTS
o Vector algebra governs the laws of addition, sub-traction, and multiplication of vectors, and vectorcalculus encompasses the laws of differentiationand integration of vectors.
o In a righrhanded orthogonal coordinate system,the three base vectors are mutually perpendicularto each other at any point in space, and the cyclicrelations governing the cross products of the basevectors obey the right-hand rule.
o The dot product of two vectors produces a scalar,whereas the cross product of two vectors producesanother vector.
o A vector expressed in a given coordinate systemcan be expressed in another coordinate systemthrough the use of transformation relations linkingthe two coordinate svstems.
CHAPTER 2 VECTOR
PROBLEMS
$ection 2-1: Vector Algebra
2.1* Vector A starts at point (1, -1, -2) andpoint (2, -1,0).Find a unit vector in the directiond
2.2 Given vectors A = i2 -j3+i, B = i2-i*and C - i4 + 92 - 22, show that C isboth A and B.
2.3* In Cartesian coordinates, the three cornerstr iangle are Pr(0,2,2), P2(2, -2,2), and P3(1, 1,Find the area of the trianele.
2.4 Given A=?2-y3+2t andB -?8,+i2+i
(a) Find & and Bz if L is parallel to B.(b) Find a relation between Bx and B, if A
perpendicular to B.
2.5* Given vectors A : i +j,2 - 23, B : i3 -and C : i3 - i4, find the following(a) A and i(b) The component of B along C(c) orc( d ) A x C(e) A.(B x C)( f ) A x ( B x C )( g ) i x B(h) (A x 9,).2
2.6 Given vectors A : *2- V+ i3 andB : i3 -find a vector C whose magnitude is 6 anddirection is perpendicular to both A and B.
2.7* Given 4 : i(2.r + 3y) - j,(zy +32) *2(3x -determine a unit vector parallel to A atP ( 1 , - 1 , 2 ) .
*Answer(s) available in Appendix D.(D Solution available in CD-ROM.

,GEBRA PROBLEMS 45
I endsion of A.
- y +23 ,licular to
rers of a. l, -2).
i f A i s
?3 -2Ld whose
(3x - y),at point
1S By expansion in Cartesian coordinates, prove:
ra) The relation for the scalar triple product given byHq. (2.29r.
rb) The relation for the vector triple product given by84. Q.33).
Ly Find an expression for the unit vector directedmryard the origin from an arbitrary point on the lineJescribed bY x : I and z : 2.
110 Find an expression for the unit vector directed:oward the point P located on the z-axis at a height h
$ove the .r-y plane from an arbitrary pint Q@, y,2)
;r the Plane z :2.
:.ll* Find a unit vector parallel to either direction of::e line described by
2 x - z : 4
\12 Two lines in the r-y plane are described by the:rpressions:
L i n e l x * 2 y - - 6L i n e 2 3 . r { 4 Y : $
'. se vector algebra to find the smaller angle betweenie lines at their intersection point.
:13. A given line is described bY
x * 2 Y : 4
\bctor A starts at the origin and ends at point P on5e line such that A is orthogonal to the line. Find an:rpression for A.
114 Show that, given two vectors A and B,ra) The vector C defined as the vector component of
B in the direction of A is given bY
c : ^ ' - - A ( B ' A )a(|'.a) : -ll1r-,
where i is the unit vector of A.
(b) The vector D defined as the vector component ofB perpendicular to A is given by
D:B_ A lB
=A)tAt,
2.15* A certain plane is described by
2 x * 3 y * 4 2 - 1 6
Find the unit vector normal to the surface in thedirection away from the origin.
2.16 Given B = i(22 - 3y) + VQx - 3z) - 2(x * t),find a unit vector parallel to B at point P(1,0, -l).
2.17 When sketching or demonstrating the spatialvariation of a vector field. we often use arrows, as inFig.2-t9, wherein the length of the arrow is made to be
Figure 2- 1 9 : Arrow representation for vector fi eld E : ir(Problem 2.17).

46 CHAPTER 2 VECTOR ALGEE
I
proportional to the strength of the field and the directionof the arrow is the same as that of the field's. Theskerch shown in Fig. 2-19, which r€presents thc vectorfield E = ir, consists of arrows pointing radially awayfrom the origin and their lengths increasing linearly inproportion to their distance away from the origin. Usingthis arrow representation, sketch each of the followingvector fields:
O (a) Er - -iy
(b) E2 : i;(c) Er : i,r + iY(d) E4 : ir + 92yG) Es :e r(f) Eo : isind
2.f 8 Use arrows to sketch each of the following vectorfields:
( a ) E r : i : - f Y(b) Ez : -a(c) & : j ( r /x)
(d) E+ * icosd
Sections 2-2 and 2-3: Coordinate Systems
2.19* Convert the coordinates of the following pointsfrom Cartesian to cylindrical and spherical coordinates:
O (a ) & (1 ,2 ,0 )(b) Pz(O,0, 3)( c ) P s ( l , 1 , 2 )(d) P4(-3, 3, -3)
2.20 Convert the coordinates of the following pointsfrom cylindrical to Cartesian coordinates:(a) h(2, n /4, -3)
(b) P2(3,0,0)(c \ f t (4 ,x ,2)
2.21* Convert the coordinates of the following pointsfrom spherical to cylindrical coordinates:
(a) &(5,0,0)S (b ) P2(5 ,0 ,n )
(c) Pr(3, tt/2,tt)
2.22 Use the appropriate expression for the difietial surface area ds to determine the area of each offollowing surfaces:
O ( a ) r : 3 ; 0 < 0 < n / 3 ; - 2 < z < 2
S ( b ) 2 < r < 5 ; n l T < Q < n ; z : 0( c ) 2 < r < 5 ; Q : r / 4 ; - 2 < z < 2
( d ) R : 2 ; 0 S 0 S r c l 3 ; O 3 Q 3 r(e) 0 S R : .5 ; 0 - - t t l3 ; 0 S0 S2n
Also sketch the outline of each surface.
2.23* Find the volumes described by the followir( a ) 2 < r < 5 ; T l 2 = Q . n ; 0 < z < 2( b ) 0 < R < 5 ; 0 < 9 < n / 3 : 0 < Q < 2 nAlso sketch the outline of each volume.
2.24 A section of a sphere is described by 0 < R0 < 0 < 90", and 30o < 0 <90. Find the followir(a) The surface area of the spherical section.
ft) The enclosed volume.Also sketch the outline of the section.
2.25* A vector field is given in cylindrical coordinby
E : i r c o s @ * f r r s i n Q + 2 2 2
Point P(4, r,2) is located on the surface of the cylildescribed by r :4. At point P, find:
(a) The vector component of E perpendicular tocylinder.
(b) The vector component of E tangential tocylinder.

PROBLEMS
lowing:
n6 At a given point in space, vectors A and B are
eiven in sPherical coordinates bY
A:fr ,4 +02-An: _ftz +er
Fnd:(a) The scalar component, or projection, of B in the
direction of A.
rb) The vector component of B in the direction of A.
rc) The vector component of B perpendicular to A.
2J7* Given v@tors
6= i ( cos Q*32 ) -OQ, *4s in i l +2 ( r -22 )
B: - is ind * ?cosQ
tnda t 01p a t (2 .n12 ,0 )
bt A unit vector perpendicular to both A and B at(2, r /3 , I )
i2J Find the distance between the following pairs ofrrints:
el Pr(1, 2,3) and Pz(-2,-3,2) in Cartesian coordi-nates
b) Pr(1, n/4,2) and Pa(3,r14,4) in cyl indricalcoordinates
ct Ps(2,n/2,0) and P6(3,n,0) in spherical coordi-nates
2.29* Determine the distance between the followingpairs of points:(a) &(1, 1,2) and P2(4,2,2)(b) h(2, r13,1\ and Pq(4, r /2 ,0)(c) P5(3, tt,tt12) and P6(4,n12,tt)
2.30 Transform the following vectors into cylindricalcoordinates and then evaluate them at the indicatedpoints:(a) A : i ( - r * y) a t P1(1,2,3)(b) B : i(y - r) + i(r - )) at Pz(1,0,2)(c) c : Syr l@, * y2) - jr, /(*, * y2) + 24 at
fu(|, -1,2)(d) o : fi. sin 9+6 cos 0+6 cos2 Q at Pa(Z, n 12, r l4)
(e) E : f i .cos{ *6s in A +Asin2d at P5(3, r12, r )
2.31* Transform the following vectors into sphericalcoordinates and then evaluate them at the indicatedpoints:(a) A : i.y' + jxz * 24 at P1(1, -1,2)
0o) n : 9@' + y2 + z2) - 2(x2 + y2) at Pz(-L, 0, 2)G (.) C : icos@ - Osind * 2cos QsinQ at
\ (2 , r /4 ,2)(d) D : *yr/(", * y2) - 9r,l@, + y\ + i4
at Pq( \ , - I ,2)
2.32-2.35 Additional Solved Problems - completesolutions on CI.