Embed Size (px)
Citation preview

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 1/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 1
EXPERT SYSTEMS AND SOLUTIONS
Email: [email protected]
Cell: 9952749533www.researchprojects.info
PAIYANOOR, OMR, CHENNAI
Call For Research Projects Final
year students of B.E in EEE, ECE, EI,
M.E (Power Systems), M.E (Applied
Electronics), M.E (Power Electronics)
Ph.D Electrical and Electronics.
Students can assemble their hardware in our
Research labs. Experts will be guiding the projects.

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 2/59
Elektrical Machines and Drives
Wuppertal University
Tutorial 2
Sensor less Motor Drives
Ralph M. Kennel

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 3/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 3
Reasons for Industrial Applications
of Drives with Encoderless Control:
� Cost
� Reliability
� Robustness

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 4/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 4
Industrial Drives with Sensorless Control
since several years / decades sensorless control is investigated
and published on conferences and magazines
- acceptance in industry, however, is rather low
Why ?new ideas and concepts are interesting for industry,
only if they do not result in higher cost or higher effort!!!
What does that meanf or industrial drives with sensorless control ?
no additional or more powerful processors / controllers no additional hardware or additional sensors (e. g. voltage sensors)
no increased installation effort with respect to parameter adjustments

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 5/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 5
introduction
� f undamental model methods
� high f requency injection methods
sensorless control of electrical machines
� machine response on high f requency injection voltages
� tracking of magnetic saliencies / anisotropies
practical results
� experiences with industrial drives
conclusions
Sensor less (Encoder less) Motor Drives

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 6/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 6
Categories of Machine Models for ÄSensorless³ Control

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 7/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 7
Basic Principlesof Encoder less Control
high f requency injectionfundamental model
� simple realisation
� does not work at frequency 0
� parameter dependencies
current injection voltage injection
� measuring voltage is high enough
� additional voltage sensors
stationary current response
� standard microcontroller sufficient
� very small measuring current
transient current response
� no additional hardware
� very short measuring time

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 8/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 8
stator rotor
mechanicswhen knowing voltage uS
as well as current i S
it should be possible
calculate speed [
Fundamental Model of an Induction Machine

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 9/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 9
Calculation of Speed by Fundamental Model
is not Practicable for Very Low Speeds
... because
� the voltage signal becomes very small
� errors between real voltage and values used f or calculation
cannot be avoided and become more signif icant
� DC components of these errors
let the integrators f or f lux calculation drif t away
the calculated speed gets more and more incorrect
is an encoder/resolver the only feasable solution ??

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 10/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 10
� this is basically a current injection method
voltage sensors are necessary !!!
� it is possible to use current derivativesinstead of motor voltages
measuring current derivatives, however ,
by standard current transducers is not really possible
� but, industrial current transducershave a current derivative available internally
can this be made avail abl e for c ustomer s ???
Signal Injection Methodaccording to J. Holtz, H.Pan, etc.

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 11/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 11
INFORM method
according to M. Schroedl(Technical University of Vienna, Austria)
� this is basically a transient voltage injection method
currents have to be sensed at specif ic times !!!
� when using standard current transducers
these cannot be synchronized with PWM
the hardware of a standard industrial drive
has to be changed
neverthel ess this method comes c l ose to i nd ustr i al need s !

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 12/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 12
Stationary Signal Injection Methodsaccording to R. Lorenz, S.-K. Sul, R. Kennel, etc.
� the basic idea is
to use the electrical machine itself as a resolver !!!
� a resolver is nothing else but an electrical machine
can we operate the motor itself like a resolver ?
� if the machine itself is a resolver (encoder)
is that really an Äencoder less³ control ???
g ood i dea ± but does i t work ???

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 13/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 13
R esolver
Stator u
e
Rotor u
R
Stator u2
Stator u
1
R1
R2
S1 S3
S4
S2
u2(K
K
TT0
u1(K
K
TT0
Tamagawa
injection of a
stationary (sinusoidal)
high f requency signal
sensing of a two-dimensional
stationary (sinusoidal)
signal response

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 14/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 14
Stationary Signal Injection Methodsaccording to R. Lorenz, S.-K. Sul, R. Kennel, etc.
� the basic idea is
to use the electrical machine itself as a resolver !!!
� a resolver is nothing else but an electrical machine
can we operate the motor itself like a resolver ?
� if the machine itself is a resolver (encoder)
is that really an Äencoder less³ control ???
now we do the same w i th an el ectr i cal AC machi ne

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 15/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 15
Fundamental Frequency Excitation
(in E- F coordinates)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 16/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 16
High Frequency Excitation
(in E- F coordinates)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 17/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 17
(F)c
(F)sa
(F)c(F)
s(F)
cs(F)c i l
i l i u [ j
dt
d r ! ¼
½
»¬«
!qs
ds( )s 0
0
l
l l
Machine Model for High Frequency Signals

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 18/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 18
High Frequency Behaviour of the Machine Model

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 19/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 19
injection of high f requency voltages
f undamental voltage phasor/vector
f undamental current phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 20/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 20
injection of high f requency voltages
f undamental voltage phasor/vector
f undamental current phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 21/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 21
injection of high f requency voltages
f undamental voltage phasor/vector
f undamental current phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 22/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 22
injection of high f requency voltages
f undamental voltage phasor/vector
f undamental current phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 23/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 23
Injection of High Frequency Rotating Phasors
rotating voltage phasor uc elliptic current response i c

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 24/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 24
elliptic current response i c (rotating)
� machine responds
on a rotating voltage phasor
with an elliptic current response
� ellipse is correlated
with the geometric anisotropy
of the rotor
� rotor position inf ormation
is included
in the high f requency current
Position Information of Salient Rotors
in High Frequency Rotating Phasors

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 25/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 25
Saturation Anisotropy
of a Permanent Magnet Synchronous Machine
rotor f lux saturation of a
permanent magnet synchronous machine

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 26/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 26
Position Information of non-salient rotors
in High Frequency Rotating Phasors
� machine responds
on a rotating voltage phasor with an elliptic current response
� ellipse is correlated
with the saturation anisotropy
� rotor position inf ormation
is included
in the high f requency current elliptic current response i c (rotating)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 27/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 27
Injection of High Frequency
Al ternating (Pu lsating) Voltage Phasors
composing an alternating (pulsating) voltage phasor
by two phasors rotating in opposite direction
advantage :
no rotational (HF) f ield
no additional torque

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 28/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 28
High Frequency Current Response
of a Synchronous Machine

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 29/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 29
Current Response
of a Misoriented System
voltage and current
show diff erent orientation !!

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 30/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 30
Current Response
under a Misorientation of 90°

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 31/59

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 32/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 32
Tracking the estimated angle of the rotor f lux by controlling i cq to 0
Tracking Scheme for Magnetic Anisotropies

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 33/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 33
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 34/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 34
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 35/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 35
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 36/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 36
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 37/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 37
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 38/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 38
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 39/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 39
step response of the PLL;
PLL is locked af ter ca. 10 -15 ms
Encoderless Control Structure

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 40/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 40
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 41/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 41
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 42/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 42
tracking control of injection voltage
f undamental current phasor/vector
f undamental voltage phasor/vector
injected high f requency
voltage phasor/vector
high f requency
current phasor/vector (response)

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 43/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 43
the estimated angle can be used
f or f i el d or i entat i on as well as f or
speed or posi t i on control
of synchronous machines
control structureof an encoder less control
with alternating high f requency
signal injection

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 44/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 44
Stator Admittance in Complex Plane
trajectory of stator admittance(SMPMSM, carrier f requency f c = 0.5 kHz)
a) theoretisch b) experimentell
north and south polecan be distinguished

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 45/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 45

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 46/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 46

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 47/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 47

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 48/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 48

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 49/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 49

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 50/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 50
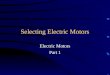
Tracking Control
tracking of estimated rotor f lux angle by adjusting/controlling i cq to zero

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 51/59
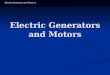
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 51
Stator Admittance in Complex Plane
trajectory of stator admittance(SMPMSM, carrier f requency f c = 0.5 kHz)
a) theoretisch b) experimentell
north and south pol
ecan be distinguished

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 52/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 52
the concept of encoder less control as presented hereworks similar to radio broadcasting :
the inf ormation of rotor position
is modulated by a high f requency signal
the inf ormation is demodulated / extracted
f rom motor currents

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 53/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 53
� Synchronous Machines
Trager..
Position
Synchron–maschine
AM / FM Position
Demodulator
Trager..
PositionLaufer
Asynchron–maschine
?Position
Feld
..
PositionFeld
PositionLaufer..
Modulation of Carrier Signals by Electrcial Machines
� Induction Machinesworks f ine !!
f urther research to be done !!

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 54/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal University Page 54
Combination of
Field Oriented Control
and Encoderless Detection
of Rotor Position
� the estimated angle can be used
for f ield orientation as well as
for speed and/or position control
of synchronous machines
� high frequency test signals are superposed to
the fundamental stator voltage(s)
� drive control structure remains as before
� no additional sensors required
� the scheme is parameter independant

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 55/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal UniversityPage 55
Drive with Speed Control
Sprungantwort der Drehzahlregelung

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 56/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal UniversityPage 56
Step Response of Encoderless Position Control
Sprungantwort der Lageregelung

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 57/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal UniversityPage 57
Results
� the tracking control scheme presented heresynchronizes on the saturation anisotropyof a synchronous machine.
� the tracking control schemeis not de pend i ng on any machi ne parameter .
� the size of additional software f or the tracking control is com parabl e to the software of a rotor model f or the f ield oriented control of an induction machine.
� the hi g h frequency c urrent si g nal can be measuredtog ether w i th the f undamental c urrent by the standard c urrent transd ucer s of a standard drive inverter.

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 58/59
Prof. Dr. -Ing. Ralph M. Kennel Wuppertal UniversityPage 58
Practical Experience with an Industrial Servo Drive
� training of a development engineer 2 x 1 week in our laboratory
Implementation of a sensor less control
into a servo drive of
� programming of additional sof twarein manuf acturerµs f actory
� delivery of prototypeaf ter ca. 3 months
� presentation on Hanover Fair in April 2006

8/6/2019 Electric Motors 5
http://slidepdf.com/reader/full/electric-motors-5 59/59