-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
1/20
A comparison of elasticplastic soil models for
2D FE analyses of tunnelling
G. Oettl*, R. F. Stark, G. HofstetterInstitute for Strength of
Materials, University of Innsbruck, Austria
Received in revised form 7 August 1998; accepted 10 August
1998
Abstract
Based on 2D FE analyses, simulating the excavation of a tunnel
and subsequent lining with
shotcrete, the impact of the employed soil model on the
predicted displacements and stresses
in the soil mass as well as on the predicted sectional forces in
the shotcrete lining is investi-
gated. In particular, four dierent soil models are considered:
linearelastic constitutive rela-
tions, the elasticplastic models according to the DruckerPrager
and to the MohrCoulombcriterion as well as an elasticplastic cap
model. The computed results are compared with
available eld data for the vertical strains. # 1998 Elsevier
Science Ltd. All rights reserved.
1. Introduction
For the numerical analysis of the excavation of a tunnel by
means of the nite
element method (FEM), it is generally accepted now that an
elasticplastic material
model for the soil to model the non-linear behavior of the soil
should be employed.There exists a large variety of models which
have been proposed in recent years to
characterize the stressstrain and failure behavior of soil
media. All these models
have their own advantages and limitations which depend to a
large degree on the
particular application. The most severe drawback associated with
rened and
sophisticated models is related to the larger number of required
parameters, some of
them often cannot be determined from standard tests. Therefore,
commonly, the
relatively simple material models with a yield surface according
to the Drucker
Prager or to the MohrCoulomb criterion and an associated or a
non-associated
ow rule are employed in practice. Although it is well known that
these simple
models have certain inherent shortcomings, more rened soil
models, such as the
Computers and Geotechnics 23 (1998) 1938
0266-352X/98/$see front matter # 1998 Elsevier Science Ltd. All
rights reserved.
P I I : S 0 2 6 6 - 3 5 2 X( 9 8 ) 0 0 0 1 5 - 9
* Corresponding author.
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
2/20
Cam-clay model or cap models are still not commonly used in
geotechnical engi-
neering in many parts of the world.
In common engineering practice the choice of the soil model
employed for a spe-
cic job mostly depends on both the expertise of the analyst and
the economicaspects in terms of computation cost. However,
application of a dierent soil model
will lead to dierent results. This might be one of the reasons
for a considerable deal
of discomfort among practitioners related to the reliability of
such computations.
Hence, it might be interesting to investigate the range of
predicted response, result-
ing from the application of dierent soil models. To this end, a
numerical study for a
2D FE analysis of the excavation of a tunnel, based on four soil
models, is con-
ducted. Apart from linearelastic constitutive relations for the
soil, the MohrCou-
lomb failure surface (Fig. 1), the DruckerPrager compressive
cone and the
DruckerPrager tensile cone (Fig. 2), each of them treated as
yield surfaces within
the framework of ideal plasticity with a non-associated ow rule,
are employed. In
addition, a cap model [8] with a non-associated ow rule for the
DruckerPrager
type failure envelope and with an associated ow rule for the
strain hardening cap, is
used [Fig. 3(a) and (c)]. The main dierence between the
DruckerPrager and Mohr-
Coulomb type models on the one hand and the cap model on the
other hand is in the
prediction of deformations under predominantly compressive
stress states. The for-
mer models have yield surfaces which are open in the direction
of the hydrostatic
compressive axis (Figs. 1 and 2), i.e. they assume linearelastic
soil response for
predominantly compressive stress states. This feature
constitutes a severe physical
shortcoming of the models, since in reality, soil behavior under
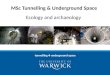
a hydrostatic stressstate is certainly non-linear. The cap model,
however, avoids this model deciency
by using a closed yield surface with a strain hardening cap. The
hardening of the cap
is dened by a non-linear relation between the volumetric plastic
strain and the
hydrostatic pressure as described in Section 3 and shown in Fig.
3(b). For plastic soil
behavior the latter is represented by the point of intersection
of the cap with the
hydrostatic axis.
In a FE analysis, when simulating the construction of a tunnel,
results strongly
depend on the applied sequential scheme of excavating and
shotcrete lining. More-
over, in a time-independent analysis the results for a
particular step of excavation
and lining placement will substantially depend on the assumption
of when the
Fig. 1. MohrCoulomb model.
20 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
3/20
shotcrete lining is regarded to be active. This assumption is
crucial, since it deter-
mines to which extent the deformations of the soil mass due to
the current excava-
tion step have already developed before the lining is in place.
Clearly, this inuences
not only the stress and deformation distribution in the soil,
but gures as a sig-
nicant design parameter for the lining element.
The paper is organized as follows. Section 2 contains a brief
description of the soil
models, employed for simplied 2D numerical simulations of
excavating and lining
of a tunnel, presented in Section 3. Finally, in Section 4 a
comparison of the results
for the dierent soil models is presented. In addition, the
computed vertical strains
in the soil are compared with available eld data, taken from
Ref. [1].
2. Material models
2.1. DruckerPrager model
From the mathematical point of view, the DruckerPrager criterion
is the most
convenient choice because of its simplicity and its
straightforward numerical imple-
mentation. In 3D principal stress space the failure surface
associated with this cri-
terion is a right-circular cone as shown in Fig. 2 which can be
expressed by thefollowing equation
F' 0I1
J2p
k 0Y I
where I1 and J2 are the rst and second invariants of the stress
tensor and the stress
deviator tensor, respectively
I1 1
3'iiY J2
1
2sijsij P
and 0 and k are material constants. However, in the present
study, as frequently
encountered in practice, these parameters are not directly
available from experiments.
Fig. 2. DruckerPrager model.
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 21
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
4/20
Fig. 3. Cap model: (a) yield surface; (b) hardening behavior of
the cap; (c) ow potential.
22 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
5/20
Rather the friction angle, 0, and the cohesion value, c, for the
MohrCoulomb
model are given. Thus, 0 and k must be expressed in terms of0
and c. Matching the
DruckerPrager model with the external apices of the MohrCoulomb
failure sur-
face we get
0 2 sin 0
3p
3 sin 0 Y k 6c os0
3p
3 sin 0 X Q
Besides this compressive meridian matching a tensile meridian
matching yields the
following relations
0 2 sin 0
3p 3 sin 0Y k 6c os03p 3 sin 0
X R
There are further ways of matching the two criterions which,
however, will not be
considered in this context.
The ow rule, dening the direction of the plastic ow is given
by
4p l dG
d'Y S
where G represents a plastic potential and l is a positive
scalar quantity dening the
amplitude of the plastic ow. For non-associative plasticity,
i.e. for G T F, theplastic potential is selected so that its
derivative with respect to the stress tensoryields
dG
d'ij 2 ij 1
2
J2p sij T
with ij and sij denoting the Kronecker delta and the stress
deviator tensor, respec-
tively. 2 is dened by a given dilation angle 2 and relations
analogous to Eqs. (3)
or (4). From a comparison of Eq. (6) with the derivative of F,
given in Eq. (1), with
respect to 'ij it can be seen that the ow rule is associative
with respect to deviatoricplastic ow and non-associative for the
volumetric plastic component, as 2 T 0.In the numerical example
described in Section 3, the Drucker-Prager model with
isochoric plastic ow, i.e. a ow potential with a vanishing
dilatancy angle 2is used;
thus, 2 0.Regarding the hardening behavior, a DruckerPrager
model with exclusively
elasticperfectly plastic material response is considered in this
study.
2.2. MohrCoulomb model
In 3D principal stress space the failure surface associated with
the classical MohrCoulomb criterion is an irregular hexagonal
pyramid, its axis coinciding with the
hydrostatic axis (Fig. 1). The function of this failure surface
can be formulated by
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 23
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
6/20
means of the MohrCoulomb material parameters 0 and c and the
stress invariants
I1Y J2 and as
F'Y 13
I1 sin 0
J2p
sin %3
J2
3
ros %
3
sin 0 c os0 0Y U
or alternatively in terms of the HaighWestergaard coordinates
$Y&Y
F$Y&Y
2p
$sin 0
3p
& sin %3
& os %
3
sin 0
6
pc os 0 0 V
with 044 %3
being the deviatoric polar angle (Lode angle). $ and & are
given in
terms of the hydrostatic and deviatoric stress invariants as
$
I1a
3p
and &
2J2p
,
respectively. Instead of the formulation, given in Eqs. (7) and
(8), a smooth, single-
surface approximation is adopted in the FE package [2] used for
this study. The
approximation of the Mohr-Coulomb criterion is a particular case
of a general
three-parameter criterion [3] given by
f$Y&Y Af &2 mf Bf & rf Y e Cf $ cf 0X W
For a specic choice of the parameters AfY Bf and Cf the general
failure criterion Eq.
(9) is reduced to a particular one, e.g. the MohrCoulomb
criterion. mf and cf arethe friction and cohesion parameter,
respectively. rf describes the shape of the failure
surface in a deviatoric plane and is given by
rf Y e 41 e2 os2 2e 12
21 e2 os 2e 1
41 e2 os2 5e2 4ep X IH
The eccentricity parameter e depicts the ``out-of-roundness'' of
the deviatoric trace.
When e is determined by
e 3 sin 03 sin 0 Y II
the generalized failure criterion Eq. (9) is calibrated to t
exactly the MohrCou-
lomb surface on both extension and compression meridians, which
leads to the
smooth failure surface. Hence, with the denition for e according
to Eq. (11), for the
extension and the compression meridians, 0 and %3
, respectively, the elliptic
function Eq. (10) takes the values 1/e and 1, respectively.
Expressing all other para-
meters of the generalized criterion Eq. (9) in terms of the
MohrCoulomb friction
angle 0 and cohesion c, we get
Af 0Y mf 1Y cf 1Y IP
24 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
7/20
Bf 3 sin 0
24
pc os0
Y Cf 1
3
pctn0X IQ
The ow potential adopted in [2] takes the form
g$Y & Ag&2 mgBg& rge Cg$X IR
It should be noticed that the radius rg is independent of the
Lode angle, i.e.
rg rf 0Y e 1
eIS
resulting in a DruckerPrager type ow potential with rg being the
radius for the
extension meridian. The other parameters AgY BgY CgY mg
determining the ow
potential Eq. (14) are evaluated in an analogous way from Eqs.
(12) and (13) but
using the dilatancy angle 2 instead of the friction angle 0. In
this study a non-asso-
ciative ow rule, strictly speaking, isochoric plastic ow (2 0)
is assumed for theMohrCoulomb model.
As in the case of the DruckerPrager model, no hardening is
considered in the
example presented in Section 3, when this type of MohrCoulomb
model is employed.
2.3. Cap model
The cap model adopted in this study is an extended DruckerPrager
model. Itsyield surface consists of a DruckerPrager cone for
shear-type failure and of an
elliptical cap for volumetric plastic compaction.
Using the invariants p, q and r given by
p 13
'iiY q
3
2sijsij
rY r 9
2sijsjkski
13
IT
allows the DruckerPrager failure surface to be written as
Fs
tYp
tEp tn
d
0Y
IU
where t is the deviatoric stress measure given by
t q2
1 1K
1 1K
r
q
34 5X IV
The formulation in Eq. (17) is consistent with the one used in
[4] and is related to
Eq. (1) by the following expressions
tn 3
3p
0Y d
3p
kX IW
K is a material parameter that represents the ratio of the
distance of stress points onthe tensile and compressive meridian
from the hydrostatic axis in a specic devia-
toric plane of the yield surface. In this study no dependence on
the third deviatoric
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 25
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
8/20
invariant, r, is taken into account in this model, i.e. t q,
requiring K 1 in Eq.(18). K 1 implies the classical yield surface
according to DruckerPrager by whichthe soil strength in tension is
likely to be overestimated.
As already mentioned previously, the MohrCoulomb material
parameters haveto be converted to equivalent DruckerPrager
parameters. Matching the parameters
to provide the same ow and failure response in plane strain [4]
results in
sin 0 tn
39 tn2 2p
9 tn tn 2 Y c os0 d
39 tn2 2p9 tn tn 2X PH
Evaluating Eq. (20) for associated ow 2 we get
rtn
3p sin 01 1
3sin
2 0
qHfd IgeY d c 3p os01 1
3sin
2 0
q PI
and for nondilatant ow 2 0 we obtain
rtn
3p
sin 0Y d c
3p
os 0X PP
In this study and d were determined by means of Eq. (21).
However, it is easily
veried, that there is only a small dierence between associated
and nondilatant owwithin the range of typical values of the
friction angle.
The cap yield surface has an elliptical shape [Fig. 3(a)] and is
written as
FctYp p pa2 Rt1 a os
!2s Rd pa tn 0Y PQ
where R is a material parameter controlling the shape of the
cap. is a small num-
ber used to dene a smooth transition surface between the
DruckerPrager cone and
the cap dened as
FttYp p pa2 t 1
os
d pa tn
!2s d pa tn 0X PR
Whereas the material response is perfectly plastic for stress
points located on the
DruckerPrager shear failure surface, for stress points on the
cap, hardening is
taken into account. This hardening behavior is governed by the
evolution parameter
pa, dened as
pa pb Rd1 R tn PS
26 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
9/20
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
10/20
The tunnel is constructed in three working cycles, dealing
sequentially with the
crown, the bench and the bottom of the tunnel as indicated in
Fig. 6. In the analysiseach working cycle is modelled by two
computation steps, simulating the excavation
of the soil material in the rst step and the placement of the
shotcrete lining in the
Fig. 4. Set up of test example: (a) domain under consideration;
(b) cross section of the tunnel.
Fig. 5. FE-model.
28 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
11/20
second step. In this study it is assumed that the deformations
along a newly gener-
ated free surface of the tunnel, resulting from the excavation
in the current working
cycle, are already present when the shotcrete lining is
installed in the current work-
ing cycle. Hence, the lining installed in a specic cycle is only
stressed due to defor-
mations generated by the excavation in subsequent working
cycles. It might be
argued that this is not a very realistic assumption, since it
requires the soil to be
stable without support in the current excavation stage. Although
this scenario is met
for the problem at hand, it might not hold for other types of
soil or dierent con-struction conditions. However, the motivation
for this assumption is to check whe-
ther the computed displacements provide an upper bound for the
measured
deformations. On the other hand, if the computed displacements
based on this
assumption are smaller than the measured ones, this could be
regarded as an evi-
dence for shortcomings of the soil model. Moreover, it is not
precisely known to
which extent the lining, placed in a specic working cycle, is
actually loaded by the
excavation in that cycle. This depends on various parameters,
like time-dependent
material response of the soil and the shotcrete, which are not
taken into account by
the employed model.
Driving a tunnel is certainly a 3D problem. To account for the
3D-eects, com-monly, in 2D FE analyses, a partial initial stress
relief is assumed for the modelled
cross section, when excavation and lining are simulated in the
analysis. Dierent
stress relief methods have been proposed in the literature.
Probably the two most
commonly used approaches are the load reduction method and the
stiness reduc-
tion method. Both methods have been successfully applied in
practice, although,
they may lead to signicantly dierent results when complex
excavation stages and
non-linear material behavior have to be modelled [5]. Applying a
stress relief method
in a 2D analysis yields some deformations in the soil before the
lining is installed.
Thus, the actually 3D states of stress and deformation in the
vicinity of the working
area, indicated by deformations in the soil mass ahead of the
tunnel face, areaccounted for in an approximate manner.
Consequently, this part of the deforma-
tions does not lead to stresses and strains in the shotcrete
lining but of course, it is
Fig. 6. Construction sequences of the tunnel.
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 29
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
12/20
accompanied by a change of the stress state in the soil.
Certainly the results depend
on the specic stress relief method applied and therefore would
veil the eect of
dierent non-linear soil models. Therefore it would not be
appropriate to take par-
tial stress relief into account. Rather a complete stress relief
is employed.The mentioned simplications with respect to the
excavation and lining scheme
and the idealization of the material behavior of the shotcrete
lining are justied,
since the primary concern of this paper is to study predictions
of dierent soil
models, commonly used in the analysis for tunnel excavation.
In the present study three elasticplastic soil models described
in the previous
section are used. Material properties for the soil and the
shotcrete lining are taken
from [1] and are summarized in Table 1. With respect to the soil
parameters and
their determination, some remarks contained in [1], are given
subsequently. Young's
modulus E was determined from the results of oedometer tests by
assuming Pois-
son's ratio to be 0.38. The parameters for the failure envelope
followed from results
of conventional triaxial tests. Since both, the angle of
internal friction, 0, and the
cohesion, c, depend on the strain rate, drained and undrained
tests were performed.
For drained tests which were performed at a strain rate of 0.1
mm/m.day the para-
meters were found to be 0 25 and c 0. Higher strain rates, e.g.
210 mm/m.day,lead to 0 12 13 and c&100 kN/m2. Since the strain
rates measured in situ weresomewhere between 0.5 and 8 mm/m.day,
for the analysis the parameters were
assumed to be 0 20X4 and c=73 kN/m2. With respect to the
application of thecap model, a shape parameter K 1 was assumed for
the shear-type failure surface.The parameter which denes the size
of the transition zone between DruckerPrager cone and cap was taken
to be 0.001, i.e. virtually no transition zone was
assumed. The hardening law used in [1] is an exponential
relationship between
hydrostatic pressure and volumetric plastic strain, whose
governing parameters were
matched with the results of oedometer tests by means of a trial
and error procedure.
In terms of the input data for the cap model implemented in
ABAQUS, this expo-
nential function was resolved in a piecewise linear function
relating the hydrostatic
compression yield stress, pb, and the corresponding volumetric
plastic strain, 4plvol.
The parameters associated with the initial location of the cap
at the onset of the
Table 1Material parameters for soil and shotcrete
Notations Units Soil Shotcrete
Specic weight kN/m3 19 25
Young's modulus E kPa 59,000 2.8.107
Poisson's ratio # 0.38 0.30
Cohesion c kPa 73
Friction angle 0 20.4 Shape parameter K 1.0
Shape parameter 0.001
Shape parameter R 0.64 Initial cap position pb j0 kPa 80 4
plbol j0 0.11
30 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
13/20
analysis were given by pb j0 80 k and 4plvol j0% 0X11. Finally
the factor R, con-trolling the shape of the cap, followed from an
estimation by means of a constant
volume test performed in a shear box. In terms of ABAQUS
parameters for Vien-
na's clayey silt R was found to be 0.64.The soil was modelled by
means of 2D bilinear isoparametric continuum elements
with 4 nodes each, assuming plane strain conditions (Fig. 5).
Using low-order ele-
ments, special attention has to be paid to the volume locking
phenomenon. As
pointed out in [6], dilatant (2 b 0 or contractant 2 ` 0
plasticity imposes essen-tially the same kinematic constraint upon
elements as in the case of isochoric
2 0 plastic ow. As described above, isochoric plastic ow was
assumed in allcases but one. Hence, elements based on the so-called
B-concept, which may safely
be used for isochoric plastic ow, were employed.
The shotcrete lining was also modelled with four noded plane
strain isoparametric
continuum elements. To ensure improved bending behavior,
elements enriched with
incompatible modes were used.
4. Comparison of the numerical results
The results presented in this section were computed using the
FE-packages ABA-
QUS [4] and Z_SOIL [2]. For the analyses based on the
DruckerPrager and the
MohrCoulomb soil models, Z_SOIL was used. Moreover, the
FE-package
AFENA [7] was employed to check the results of the commercial
nite elementprograms. Although AFENA does not use the smooth
approximation of the Mohr
Coulomb yield surface, the results agreed quite well with those
from Z_SOIL. The
results for the cap model were obtained from ABAQUS.
Figs. 7 and 8 contain the computed surface settlements and the
computed dis-
placements of the soil at the boundary of the cross section of
the tunnel after exca-
vation and lining of the tunnel have been completed. As one
would expect, the
smallest surface settlements and the smallest displacements of
the boundary of the
Fig. 7. Surface settlements.
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 31
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
14/20
cross section of the tunnel are obtained using the linearelastic
model (EL) for the
soil. The magnitude of the surface settlements predicted by the
MohrCoulomb
model (MC) is between those, obtained for the DruckerPrager
tensile cone (DP-EX) and the DruckerPrager compressive cone
(DP-CO). Figs. 7 and 8 clearly
indicate that the surface settlements and the displacements of
the soil at the bound-
ary of the cross section of the tunnel, based on the cap model
(CA), are considerably
larger than the respective values, prognosticated by the
commonly employed simple
elasticplastic models. As already pointed out in the
introduction, the main dier-
ence between the latter and the cap model is given by the
treatment of pre-
dominantly compressive stress states. As can be seen from Figs.
7 and 8 this
renement with respect to the representation of the soil behavior
has a considerable
impact on the predicted deformations. The striking changes of
the displacements at
the interfaces between dierent excavation stages (Fig. 8) is
very much due to thespecic assumptions of the model, i.e. to
simulate the excavation of the soil and the
installation of the liner in two consecutive steps. Again, this
eect is by far more
pronounced for the cap model than for the elastic model or the
other simple elastic
plastic models. Regarding the surface settlements both with
respect to the maximum
settlement and the width of the settlement trough, the dierence
between the cap
model and the simple models is even more distinct (Fig. 7). This
is the consequence
of the elasticplastic material response, being no longer conned
to a relatively small
region around the tunnel when employing a cap model.
Figs. 9 and 10 contain plots of the distribution of the vertical
and the horizontal
normal stresses in the soil along three sections stretching nine
meters away from theshotcrete lining for the nal stage. Fig. 5
shows the position and orientation of these
sections. For comparison, the primary stresses drawn in dashed
lines, are also
Fig. 8. Soil displacements of the cross section of the
tunnel.
32 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
15/20
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
16/20
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
17/20
plots also contain some eld data (MEAS), given in [1], which
were obtained from
tests with sliding micrometers. One might argue that considering
the simplifying
assumptions made in the analysis, a comparison with in situ
measurements is
somehow arbitrary. These assumptions, however, were made in
order to get an
upper bound for the displacements. Consequently, we cannot
expect perfect agree-
ment between experimental data and numerical results. However,
what the plots do
show is a tendency to grasp the real behavior in a better way
the more sophisticatedthe employed model is. In particular it can
be seen that the vertical strains, predicted
by the linear elastic model are generally underestimated
compared with eld data. A
Fig. 11. Vertical strains in the soil, relative to the primary
state.
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 35
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
18/20
further general tendency reected by the three plots of Fig. 11
is, that the results
based on the cap model constitute the other extreme, i.e. these
results tend to over-
estimate the vertical strains, which might be expected as a
consequence of the sim-
plifying assumptions for the analysis. For the vertical sections
above and below thetunnel, for which the plots refer to regions
being in a state of relaxation, the fan of
results for the dierent models is relatively narrow. In these
regions of unloading
there is not much dierence between the response, predicted by
the dierent models.
However, for the plot of the vertical strains along the
horizontal section the picture
is quite dierent. For this region with compressive loading the
cap model is the only
model which does not underestimate the vertical strains. Hence,
the ndings seem to
conrm that by means of the cap model an upper bound for the
displacements is
determined. Unfortunately, no eld data were available close to
the tunnel.
All models but the cap model employed in this study do not take
into account the
plastic compaction of the soil under predominantly hydrostatic
pressure. This,
however, seems to be one of the key aspects and the surface
settlement caused by
driving the tunnel may be governed by this eect to a
considerable amount. Since
the vertical strains in these areas of compaction and,
consequently, also the surface
settlement are overestimated by the cap model in this study, the
results predicted by
this model are conservative. This might be crucial in urban
areas.
In Fig. 12 distributions of the normal force and the bending
moment in the shot-
crete lining are plotted. Since the shotcrete shell for the
bottom of the cross section
of the tunnel was placed after the deformations due to
excavating the bottom have
occurred, there are no stresses in the respective part of the
shotcrete lining. Asexpected, the maximum normal force and the
maximum bending moment in the
Fig. 12. Bending moment and normal force in the shotcrete
lining.
36 G. Oettl et al./Computers and Geotechnics 23 (1998) 1938
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
19/20
lining are predicted in the upper part of the lining,
irrespective of the employed soil
model. However, there are considerable dierences in the
predicted maximum values
of the normal force in the lining. Modelling the soil behavior
using the cap model or
the DruckerPrager tensile cone yields maximum values for the
normal force, whichare about 25% larger than the respective value,
predicted on the basis of the Mohr
Coulomb model for the soil. As expected, smaller values of the
normal force in the
lining are predicted employing the DruckerPrager compressive
cone for the soil. By
contrast, except for the DruckerPrager compressive cone, which
yields smaller
bending moments, there is almost no dierence for the predicted
maximum value of
the bending moment between the dierent elasticplastic soil
models.
5. Conclusions
In a numerical study of a 2D FE analysis dealing with multistage
excavation and
lining of a tunnel, dierent material models for the
representation of the soil beha-
vior have been employed. In particular, linearelastic
constitutive relations, the
elasticplastic models according to the DruckerPrager and to the
MohrCoulomb
criterion as well as an elasticplastic cap model were taken into
account. Signicant
dierences of the predicted surface settlements have been found
between the simple
elasticplastic models, based on a DruckerPrager or MohrCoulomb
type yield
surface, and the cap model. Such signicant dierences are also
observed for the
predicted deformations of the boundary of the cross section of
the tunnel. Com-parison with eld data clearly shows, that an
analysis based on the current simpli-
fying assumptions cannot describe the response of the soil with
desired accuracy.
However, focussing on dierent soil models, this comparison
reveals, that the cap
model seems to be superior to the DruckerPrager and MohrCoulomb
model in
the sense that an upper bound for the displacements is obtained
by accounting for
the nonlinear soil behavior under predominantly compressive
stress states. At least
for the selected example this feature yields conservative
results with respect to the
deformations in the soil due to the excavation. However, further
investigations
would be necessary to improve the unloading/reloading behavior
of the model.
Acknowledgements
The study described in this paper was partially funded by the
Austrian Science
Foundation, FWF (Fonds zur Fo rderung der wissenschaftlichen
Forschung), under
project number S08005-TEC. This support is gratefully
acknowledged.
References
[1] Kropik Ch. Three-dimensional elasto-viscoplastic nite
element analysis of deformations and stresses
resulting from the excavation of shallow tunnels. Ph.D. thesis,
University of Technology of Vienna,
1994.
G. Oettl et al./Computers and Geotechnics 23 (1998) 1938 37
-
7/28/2019 elasticplastic soil models for 2D FE analyses of
tunnelling
20/20