-
7/28/2019 EL5067 13 Lec02 RTL Design
1/50
Lecture 02
Register Transfer Level (RTL) Design
EL5067 Sistem VLSI UntukKomunikasi Digital
-
7/28/2019 EL5067 13 Lec02 RTL Design
2/50
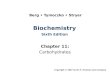
Introduction to RTL Design
Controllers
Combinational
logic
n0s1 s0
n1
bobi
clkState register
F
SM
inputs
F
SM
outputs
ALU
Comparator
Register file
Register
Combinational
logic
n0s1 s0
n1
bobi
State register
Register file
ALU
Datapath
Controller
Datapath Components
Custom Processor
-
7/28/2019 EL5067 13 Lec02 RTL Design
3/50
Level Deskripsi Desain
Algorithmic level
Register Transfer Level
Logic (gate) level
Circuit (transistor) level
Physical (layout) level
Level Deskripsi yang
paling cocok untuk sintesis
-
7/28/2019 EL5067 13 Lec02 RTL Design
4/50
Register Transfer Level (RTL)
Rangkaian Logika
KombinasionalRangkaian Logika
Kombinasional
Register
-
7/28/2019 EL5067 13 Lec02 RTL Design
5/50
Sintesis
architecture MLU_DATAFLOW of MLU is
signal A1:STD_LOGIC;
signal B1:STD_LOGIC;
signal Y1:STD_LOGIC;
signal MUX_0, MUX_1, MUX_2, MUX_3: STD_LOGIC;
beginA1
-
7/28/2019 EL5067 13 Lec02 RTL Design
6/50
Metode Desain RTL
1. Susun suatu High-Level State
Machine(HLSM)
2. Buat Datapath3. Hubungkan Datapath ke
Controller
4. Susun FSMuntuk Controller5. Nyatakan FSMD dalam HDL
-
7/28/2019 EL5067 13 Lec02 RTL Design
7/50
Contoh: Pengukur Jarak Berbasis-Laser
Pengukuran Jarak Berbasis-Laser
Tembakkan laser, ukur T (time of flight
) Laser bergerak dengan kecepatan cahaya yaitu
3x108
m/det
Jarak obyek ukur, D = T (det) 3x108
(m/det)
Obyek
ukur
D
2D = T (det ) 3x108 (m/det)
sensor
laser
T (dalam detik)
-
7/28/2019 EL5067 13 Lec02 RTL Design
8/50
Step 1 : Susun High-Level State Machine
Input/output
B: input 1-bit, dari tombol, tanda mulai pengukuran
L: output 1-bit, mengaktifkan laser
S: input 1-bit, mendeteksi pantulan laser
D: output 16-bit, merepresentasikan jarak obyek ukur
sensor
laser
T (dlm detik)
Berbasis-
Laser
Jarak
Pengukur
16
dari tombol
ke displayS
L
D
Bke laser
dari sensor
-
7/28/2019 EL5067 13 Lec02 RTL Design
9/50
Step 1 : Susun High-Level State Machine
Nyatakan input dan output, buat diagram blok
Buat state awal, namai S0
Keadaan awal: laseroff(L=0)
Keadaan awal: tampilan jarak = 0 (D=0)
Berbasis-
Laser
Jarak
Pengukur
16
dari tombol
ke displayS
L
D
Bke laser
dari sensor
Input: B(1 bit), S (1bit)Output: L (1bit), D (16 bit)
S0 ?
L = 0 (laserOFF)D = 0 (jarak = 0)
-
7/28/2019 EL5067 13 Lec02 RTL Design
10/50
Step 1 : Susun High-Level State Machine
Tambahkan sebuah state, namai S1, yangmerepresentasikan keadaan
menunggu tombol B
ditekan
S0
L = 0D = 0
S1 ?
B (tombol tdk ditekan)
B(tombolditekan)
S0
Input: B(1 bit), S (1bit)
Output: L (1bit), D (16 bit)
Berbasis-
Laser
Jarak
Pengukur
16
dari tombol
ke displayS
L
D
Bke laser
dari sensor
-
7/28/2019 EL5067 13 Lec02 RTL Design
11/50
Step 1 : Susun High-Level State Machine
Tambahkan sebuah stateS2 , yang mewakilikeadaan laser diaktifkan
(L=1)
Kemudian matikan laser (L=0) pada stateS3
S0 S1 S2L = 0D = 0
L = 1(laser ON)
S3L = 0
(laser OFF)
B
B
Input: B (1 bit), S (1 bit)Output: L (bit), D (16 bits)
Berbasis-
Laser
Jarak
Pengukur
16
dari tombol
ke displayS
L
D
Bke laser
dari sensor
-
7/28/2019 EL5067 13 Lec02 RTL Design
12/50
Ukur waktu dengan menghitung jumlah c lock cyc leselama
berada di S3 Untuk mencacah, gunakan Dctr
Naikkan Dctr untuk setiap clock cycle selama di S3
Inisialisasi Dctr = 0 pada S1. (boleh juga pada S2 )
Register Lokal: Dctr (16 bits)
S0 S1 S2 S3
L = 0D = 0
L = 1 L = 0Dctr = Dctr + 1
(hitung jumlah cycle)
Dctr = 0(reset jumlah
clock cycle)
B
B
S (tdk ada pantulan)
S (ada pantulan)?
Input: B (1 bit), S (1 bit) Output: L (1 bit), D (16 bit)
Step 1 : Susun High-Level State Machine
-
7/28/2019 EL5067 13 Lec02 RTL Design
13/50
Step 1 : Susun High-Level State Machine
Jika pantulan terdeteksi (S), pergilah ke stateS4
Dengan asumsi frekuensi clock 3x108Hz, Dctr
merepresentasikan bilangan dalam meter, jadi D=Dctr/2
S0 S1 S2 S3
L = 0D = 0 L = 1L=0
Dctr = Dctr + 1Dctr = 0
B S
B S
D = Dctr / 2(hitung jarak D)
S4
Register Lokal: Dctr (16 bit)
Input: B (1 bit), S (1 bit) Outputs: L (1bit), D (16 bit)
Berbasis-
Laser
Jarak
Pengukur
16
dari tombol
ke displayS
L
D
Bke laser
dari sensor
-
7/28/2019 EL5067 13 Lec02 RTL Design
14/50
Step 2 : Buat Datapath
Datapath haruslah mampu mengimplementasi penimpanan data
mengimplementasi komputasi data
Perhatikan HLSM, lakukan 3 langkah berikut
(a) Buat input/output data menjadi input/outputdatapath
(b) Representasikan setiap register lokal di datapath
(juga nyatakan suatu register untuk setiap data
output) (c) Periksa setiap state dan transisi, dan nyatakan
komponen datapath dan interkoneksinya yang
mengimplementasikan komputasi data
-
7/28/2019 EL5067 13 Lec02 RTL Design
15/50
Step 2: Buat Datapath
DatapathDreg_clr
Dctr_clr
Dctr_cnt
Dreg_ld
Register Lokal : Dctr (16 bits)
S0 S1 S2 S3
L = 0D = 0 L = 1 L=0Dctr = Dctr + 1Dctr = 0
B S
B S
D = Dctr / 2(hitung D)
S4
load
Q
IDreg: 16-bit
register
Q
Dctr: 16-bitup-counter
16
D
clearclear
count
Input: B (1 bit), S (1 bit) Output: L (1bit), D (16 bit)
-
7/28/2019 EL5067 13 Lec02 RTL Design
16/50
Step 2: Create a Datapath
clear
count
clear
load
Q Q
I
Dctr: 16-bitup-counter
Dreg: 16-bitregister
16
D
Datapath
Dreg_clr
Dctr_clr
Dctr_cnt
Dreg_ld16
16
>>1
Register Lokal: Dctr (16 bit)
S0 S1 S2 S3
L = 0
D = 0
L = 1 L=0
Dctr = Dctr + 1
Dctr = 0
B S
B S
D = Dctr / 2
(hitung D)
S4
Inputs: B (1 bit), S (1 bit) Output: L (bit), D (16 bit)
-
7/28/2019 EL5067 13 Lec02 RTL Design
17/50
Step 3: Hubungkan Datapath ke Controller
Cock 300 MHz
D
BL
S
16
ke display
dari tombol Controller
ke laser
dari sensor
Datapath
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
clearcount
clear
load
Q Q
IDctr: 16-bitup-counter
Dreg: 16-bitregister
16
D
Datapath
Dreg_clr
Dctr_clrDctr_cnt
Dreg_ld 16
16
>>1
-
7/28/2019 EL5067 13 Lec02 RTL Design
18/50
Step 4: Susun FSM untuk Controller
Clock 300 MHz
D
BL
S
16ke display
dari tombol
Controller
ke aser
dari sensor
Datapath
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
Inputs: B, SOutputs: L, Dreg_clr, Dreg_ld, Dctr_clr,
Dctr_cnt
S0 S1 S2 S3
L = 0 L = 1 L = 0L = 0
B S
B S
S4
L = 0
Input: B (1bit), S (1 bit) Outputs: L (bit), D (16 bit)Register
Lokal: Dctr (16 bit)
S0 S1 S2 S3
L = 0
D = 0
L = 1 L=0
Dctr = Dctr + 1
Dctr = 0
B S
B S
D = Dctr / 2
(hitung D)
S4
Dreg_clr = 1
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser off)
(clear D reg)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 1
Dctr_cnt = 0
(clear count)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser on)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 1
(laser off)
(count up)
Dreg_clr = 0
Dreg_ld = 1
Dctr_clr = 0
Dctr_cnt = 0
(load D reg with Dctr/2)
(stop counting)
-
7/28/2019 EL5067 13 Lec02 RTL Design
19/50
S0 S1 S2 S3
L = 0 L = 1 L = 0L = 0
B S
B SS4
L = 0Dreg_clr = 1
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser off)
(clear reg D)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 1
Dctr_cnt = 0
(clear count)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser on)
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 1
(laser off)
(cacah naik)
Dreg_clr = 0
Dreg_ld = 1
Dctr_clr = 0
Dctr_cnt = 0
(isi D-reg dg Dctr/2)
(berhenti mencacah)
S0 S1 S2 S3
L = 0 L = 1 L = 0
B S
B S
(laser on)
S4
Input: B, S Output: L, Dreg_clr, Dreg_ld, Dctr_clr, Dctr_cnt
Dreg_clr = 1
(laser off)
(clear D-reg)
Dctr_clr = 1Dctr_cnt = 1
(laser off)
(cacah naik)
Dreg_ld = 1
Dctr_cnt = 0
(isi D-reg dg Dctr/2)
(berhenti mencacah)
(clear count)
Step 4: Susun FSM untuk Controller
-
7/28/2019 EL5067 13 Lec02 RTL Design
20/50
300 MHz Clock
D
BL
S
16ke display
dari tombol
Controller ke laser
dari sensor
Datapath
Dreg_clr
S0 S1 S2 S3
L = 0 L = 1 L = 0
B S
B S
(laser on)
S4
Input: B, S Output: L, Dreg_clr, Dreg_ld, Dctr_clr, Dctr_cnt
Dreg_clr = 1
(laser off)
(clear D-reg)
Dctr_clr = 1
(clear count) Dctr_cnt = 1
(laser off)
(cacah naik)
Dreg_ld = 1
Dctr_cnt = 0
(isi D-reg dg Dctr/2)
(berhenti mencacah)
Dreg_ld
Dctr_clr
Dctr_cnt
clearcount
clear
load
Q Q
IDctr: 16-bitup-counter
Dreg: 16-bitregister
16
D
Datapath
Dreg_clr
Dctr_clrDctr_cnt
Dreg_ld 16
16
>>1
Step 4: Susun FSM untuk Controller
-
7/28/2019 EL5067 13 Lec02 RTL Design
21/50
Kode VHDL pada Level
Teratas (Top Level)
300 MHz Clock
D
BL
S
16
ke display
dari tombol
Controller
ke laser
dari sensor
Datapath
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
Step 5: Representasi dalam VHDL
-
7/28/2019 EL5067 13 Lec02 RTL Design
22/50
Datapath merupakan interkoneksi
dari komponen-komponen Datapath
Asumsikan komponen: up-counter,register, dan shift-right sudah
tersedia300 MHz Clock
D
BL
S
16
Controller
Datapath
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
clearcount
clear
load
Q Q
IDctr: 16-bitup-counter
Dreg: 16-bitregister
16
D
Datapath
Dreg_clr
Dctr_clrDctr_cnt
Dreg_ld 16
16
>>1
Step 5: Representasi dalam VHDL
-
7/28/2019 EL5067 13 Lec02 RTL Design
23/50
300 MHz Clock
D
BL
S
16
Controller
Datapath
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
clearcount
clear
load
Q Q
IDctr: 16-bitup-counter
Dreg: 16-bitregister
16
D
Datapath
Dreg_clr
Dctr_clrDctr_cnt
Dreg_ld 16
16
>>1
-
7/28/2019 EL5067 13 Lec02 RTL Design
24/50
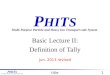
Step 5: Kode VHDL
S0 S1 S2 S3
L = 0 L = 1 L = 0
B S
B S
(laser on)
S4
Inputs: B, S Outputs: L, Dreg_clr, Dreg_ld, Dctr_clr,
Dctr_cnt
Dreg_clr = 1
(laser off)
(clear D reg)
Dctr_clr = 1
(clear count) Dctr_cnt = 1
(laser off)
(count up)
Dreg_ld = 1
Dctr_cnt = 0
(load D reg with Dctr/2)
(stop counting)
-
7/28/2019 EL5067 13 Lec02 RTL Design
25/50
Catatan Penting
S3
Dctr = Dctr + 1
S
SS3
S/Dctr=Dctr +1
S/Dctr=Dctr+1
In the HLSM., all writes to storage items in a states actions
are tostorage items that are loaded on rising clock edges only. As
such,
writing a value to a storage item in a states actions does
not
actually cause the storage item to be updated until the next
rising clock edge.
A simple way to visualize a states local storage is to consider
those
updates as occuring on each outgoing transition instead of in
the
state, as in Figure shown above.
-
7/28/2019 EL5067 13 Lec02 RTL Design
26/50
ICA #1: Reaction Timer
Using RTL design method discussed in class, create an RTL
designof a reaction timer circuit that measures the time elapsed
between
the illumination of a light and the pressing of a button by a
user. The
reaction timer has three inputs, a clock input c lk, a start
input
start, and a button input B, and three outputs, a light enable
output
len, a 12-bit reaction time r t ime, and a s low output
indicating theuser was not fast enough. The reaction timer works as
follows. On
start, the reaction timer waits for 10 seconds before
illuminating the
light by setting lento 1. The reaction timer then measures the
length
of time in milliseconds before the user presses the button
B,
outputting the time as 12-bit binary number on r t ime. If the
user did
not press the button within 2 seconds (2000 milliseconds),
the
reaction timer will set the output s lowto 1 and output 2000
on
r t ime. Assume your clock has a frequency of 1 kHz. Hint:
Design
the datapath to structure, but design the controller to FSM
only.
-
7/28/2019 EL5067 13 Lec02 RTL Design
27/50
HLSM untuk Reaction Timer
27
start
Done
Slow
CountWaitInit
wCount = 0
rCount = 0
B
slow = 1
rtime = rCount
len = 1
rCount = rCount +1
rtime = 0
wCount = wCount + 1
slow = 0
B (rCount < 2000)
(wCount
-
7/28/2019 EL5067 13 Lec02 RTL Design
28/50
DATAPATH
CONTROLLER
+1
ld
ld
clr
clrrCount
rtime
Y)
(end)
(then stmts) (else stmts)
(b)
X>Y
!(X>Y)
Max=X Max=Y
(a)
Inputs: uint X, Y
Outputs: uint Max
if (X > Y) {
}
else {
}
Max = X;
Max = Y;
C code to High Level State Machine
-
7/28/2019 EL5067 13 Lec02 RTL Design
49/50
C code to High-Level State Machine
sum = sum + abs(A[i] - B[i]);
Inputs: byte A[256], B[256]bit go;
Output: int sadmain(){
uint sum; short uint i;while (1) {
sum = 0;i = 0;
while (!go);
while (i < 256) {
i = i + 1;
}sad = sum;}
}
-
7/28/2019 EL5067 13 Lec02 RTL Design
50/50