Embed Size (px)
Citation preview

Efficient Modeling of Rotational Effects for Wind Turbine Structural Dynamic Analysis
Diederik den Dekker September 9th 2010

U.S. President Obama visits Siemens rotor blade plant in the U.S. state of Iowa, april 28th, 2010
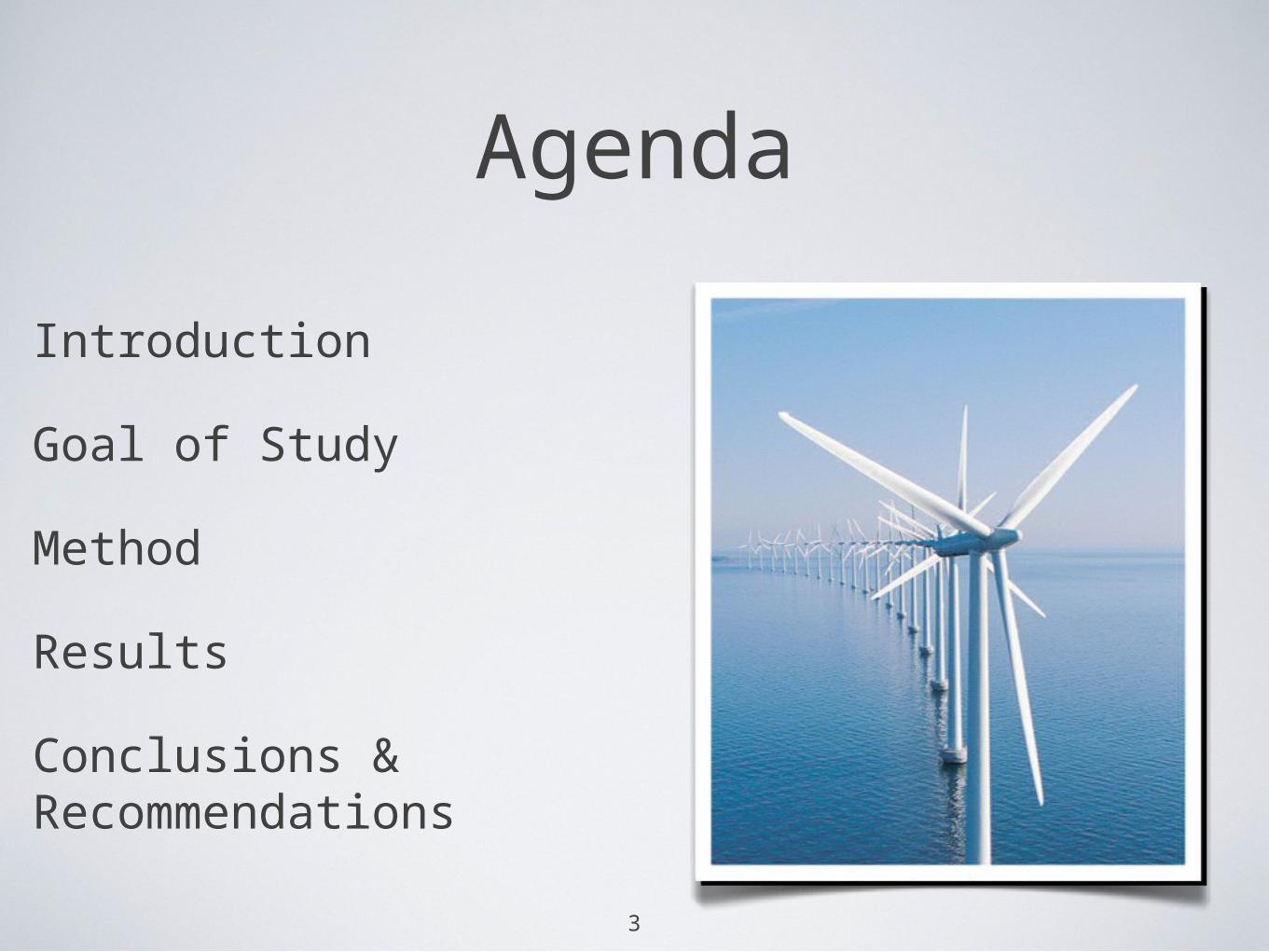
Agenda
Introduction
Goal of Study
Method
Results
Conclusions & Recommendations
3

Introduction

Horizontal Axis Wind Turbine
5

Wind industry is growing rapidly
6

Wind turbines can become a mayor energy source by
reducing their costs
* U.S. estimate for plants entering service in 2016
7

Structural dynamics is the cornerstone of cost
reduction
8
Dynamic analysisDynamic analysis
OptimizationOptimizationTurbine designTurbine design
Behavior predictionBehavior prediction
Cost Reduction!Cost Reduction!

Linear dynamic formulation
m&&x + kx=F
Single DoF system Multiple DoF system
m1
x1
Fm2k1 k2
x2
m1 0
0 m2
⎡
⎣⎢⎢
⎤
⎦⎥⎥
&&x1
&&x2
⎡
⎣⎢⎢
⎤
⎦⎥⎥+
k1 −k2
−k2 k2
⎡
⎣⎢⎢
⎤
⎦⎥⎥
x1
x2
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
0
F
⎡
⎣⎢⎢
⎤
⎦⎥⎥ M&&x + Kx=F
x
k
Fm
9

m ff&&q f + K ffqf = Qe( ) f
x1
x2
x3
10
Linear dynamic formulation
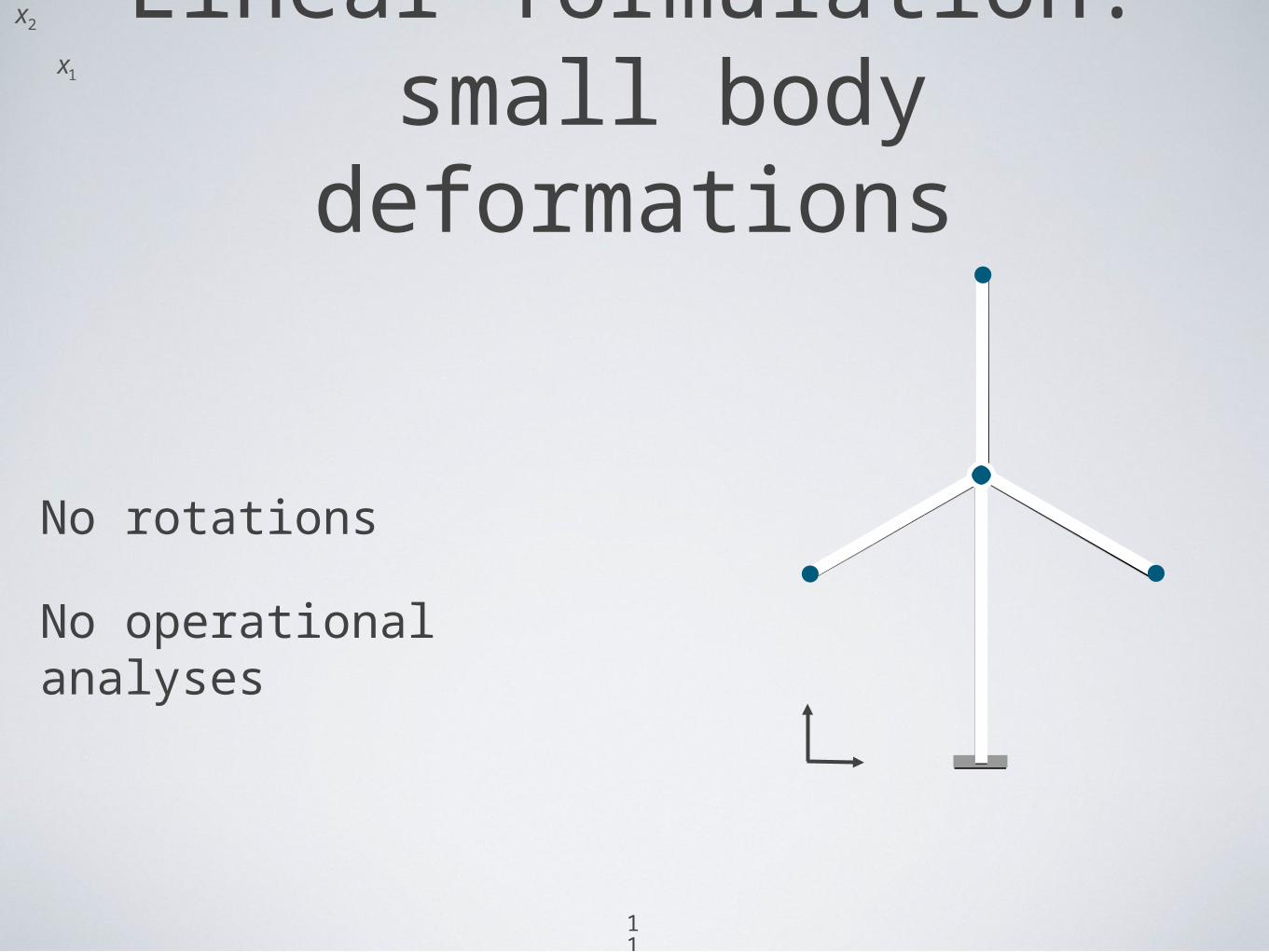
No rotations
No operational analyses
Linear formulation: small body deformationsx1
x2
11

x1
x2
12

x1
x2
′x1
′x2
Floating Frame of Reference (FFR)
13

x1
x2
&&q fm ff K ff q f Qe( ) f+ =
′x1
′x2
Floating Frame of Reference (FFR)
14

&&qr&&q f
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
0 00 K ff
⎡
⎣⎢⎢
⎤
⎦⎥⎥
qrq f
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Qe( )r
Qe( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
+ =
x1
x2
′x1
′x2
Floating Frame of Reference (FFR)
15

&&qr&&q f
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
0 00 K ff
⎡
⎣⎢⎢
⎤
⎦⎥⎥
qrq f
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Qe( )r
Qe( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
Qv( )r
Qv( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
+ = +
x1
x2
′x1
′x2
16
Floating Frame of Reference (FFR)

&&qr&&q f
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
0 00 K ff
⎡
⎣⎢⎢
⎤
⎦⎥⎥
qrq f
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Qe( )r
Qe( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
Qv( )r
Qv( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
+ = +
x1
x2
′x1
′x2
17
Non-linear
Floating Frame of Reference (FFR)

FFR mass matrix
18
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥

36 DoF System in 1 FFR
FFR mass matrix
QuickTime™ and aH.264 decompressor
are needed to see this picture.
mrr qr ,q f( ) mrf qr ,qf( )
mrfT qr ,qf( ) mff
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
19

FFR mass matrix mrr qr ,q f( ) mrf qr ,qf( )
mrfT qr ,qf( ) mff
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
20
36 DoF System in 1 FFR

FFR adds rotational effects to a linear
formulation
m ff&&q f + K ffqf = Qe( ) f
21
Method
FormulationCharacteristic
s
Linear Efficient
FFR Rotations
&&qr&&q f
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
0 00 K ff
⎡
⎣⎢⎢
⎤
⎦⎥⎥
qrq f
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Qe( )r
Qe( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
Qv( )r
Qv( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
+ = +

Siemens Wind Power uses two tools for structural
dynamic analysisBHawCSiemens DS Tool
22

BHawC DS Rotating DSSimplified
Rotating DS
Rotations ✓ ✕ ✓ ✓
Model detail
CPU Speed ? ? ?23
Methodologies

Goal of Study

To what extent can the rotational effects be simplified...
...for various wind turbine operational analyses...
...without significantly impacting their dynamic characteristics?
25

Method

FFR simplification methodology
&&qr&&q f
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
mrr mrf
mrfT m ff
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
0 00 K ff
⎡
⎣⎢⎢
⎤
⎦⎥⎥
qrq f
⎡
⎣⎢⎢
⎤
⎦⎥⎥
Qe( )r
Qe( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
Qv( )r
Qv( ) f
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
+ = +
M qr ,q f( )&&q+ Kq=Qe &qr , &qf ,qr ,qf( ) +Qv &qr , &qf ,qr ,qf( )
Investigate which DoF to fixInvestigate which DoF to fix
27
Determine fixed position of DoFDetermine fixed position of DoF
Fix DoF in equation of motionFix DoF in equation of motion
Simplified equations of motion Simplified equations of motion
M&&q + Kq=Qe +Qv( )

Investigation into the efficiency and accuracy of
simplified models
Accuracy and
CPU speed
Accuracy and
CPU speedVerificationVerification
BHawC model
BHawC model
Load CasesLoad Cases
OutputOutput
Reference
model
Reference
model
Load CasesLoad Cases
OutputOutput
Simplified
models
Simplified
models
Load CasesLoad Cases
OutputOutput

Siemens SWT-2.3-93
Nominal power: 2.3 MW
Rotor diameter: 93m
Operating wind speed: 4 - 25m/s
Rotor speed: 6 - 16RPM
Turbines in operation: 1,374
29

xxxx
xx
X3
X2X1
X3
X2X1
X2iX1
i
X3i
X1i
X3i
X2i
Siemens FFR wind turbine (SFW)model
30

Siemens FFR wind turbine (SFW)model
• 49 DoF
• 1 FFR
xxxx
xx
X3
X2X1
X3
X2X1
X2iX1
i
X3i
X1i
X3i
X2i

Three load cases are used to test the simplifications
Steady State
Wind Gust
Emergency Shut Down
32

33
Steady State:
Rotor speed:
16RPM
Wind speed:
14m/s
Extracted power:2.3MW
(blade deformation magnified 10x)
All units along axes in meters

34
Emergency Shut Down
Initial rotor speed:
16RPM
Wind speed:
14m/s
Shut down time: <10s
QuickTime™ and aH.264 decompressor
are needed to see this picture.
All units along axes in meters

Results

Deformation DoF Rotation DoF
Fix Fix
ϕθψ q f
Simplificationone
Simplificationtwo
Simplification
Three
Three simplifications discussed today
ReferenceModel
36

Deformation DoF Rotation DoF
Fix Fix Fix
ϕθψ q f
Simplificationone
Simplificationtwo
Simplification
Three
Three simplifications discussed today
ReferenceModel
37

Deformation DoF Rotation DoF
Fix Fix Fix Fix
ϕθψ q f
Simplificationone
Simplificationtwo
Simplification
Three
Three simplifications discussed today
ReferenceModel
38

Deformation DoF Rotation DoF
ϕθψ q f
Simplificationone
Simplificationtwo
Simplification
Three
Three simplifications discussed today
ReferenceModel
39

Average CPU speed increase
per time step*
*excluding overhead40

41
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Steady State

42
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Steady State

43
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Steady State

44
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Wind Gust

45
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Wind Gust

46
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Wind Gust

47
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Emergency Shut Down
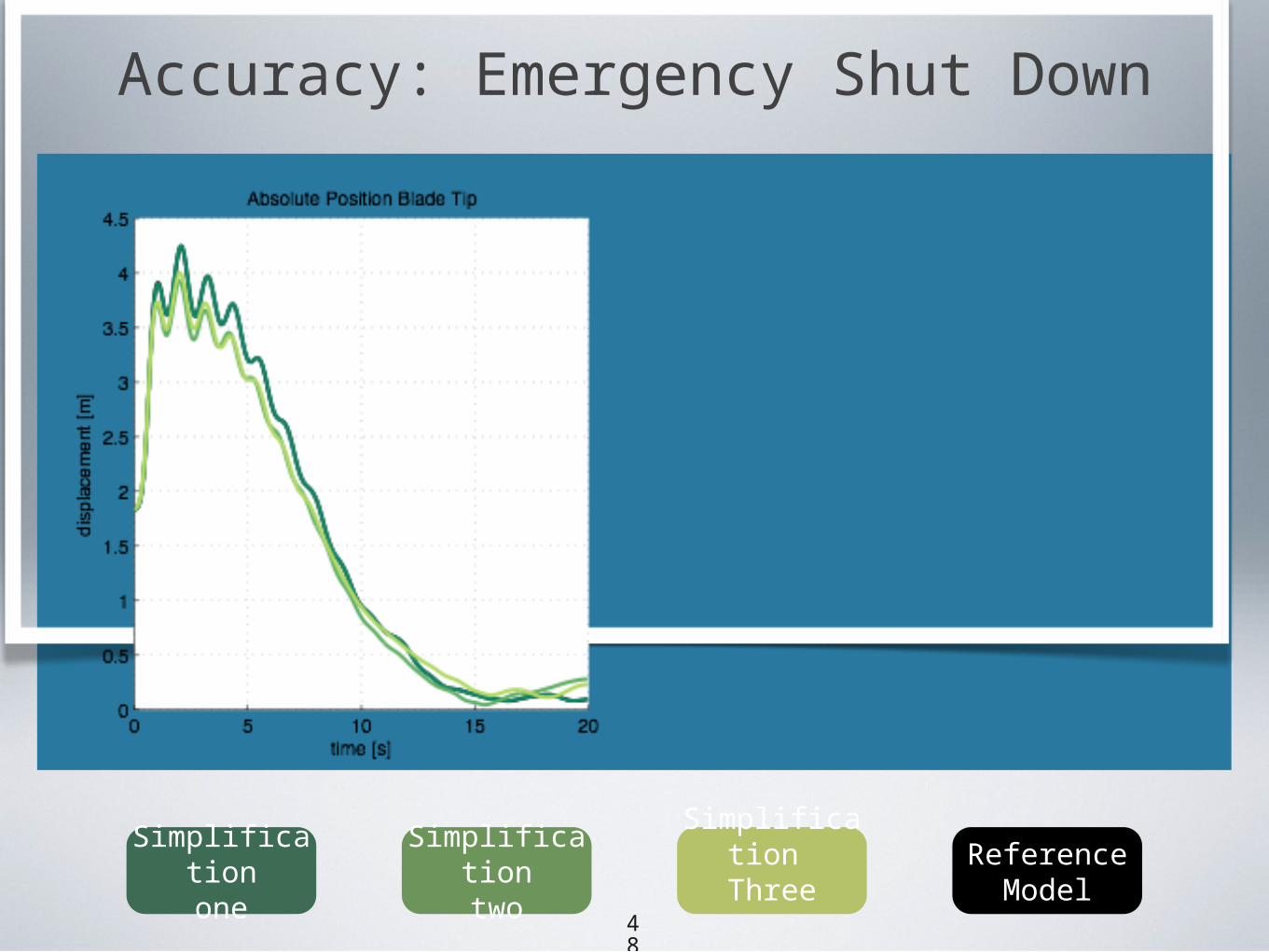
48
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Emergency Shut Down
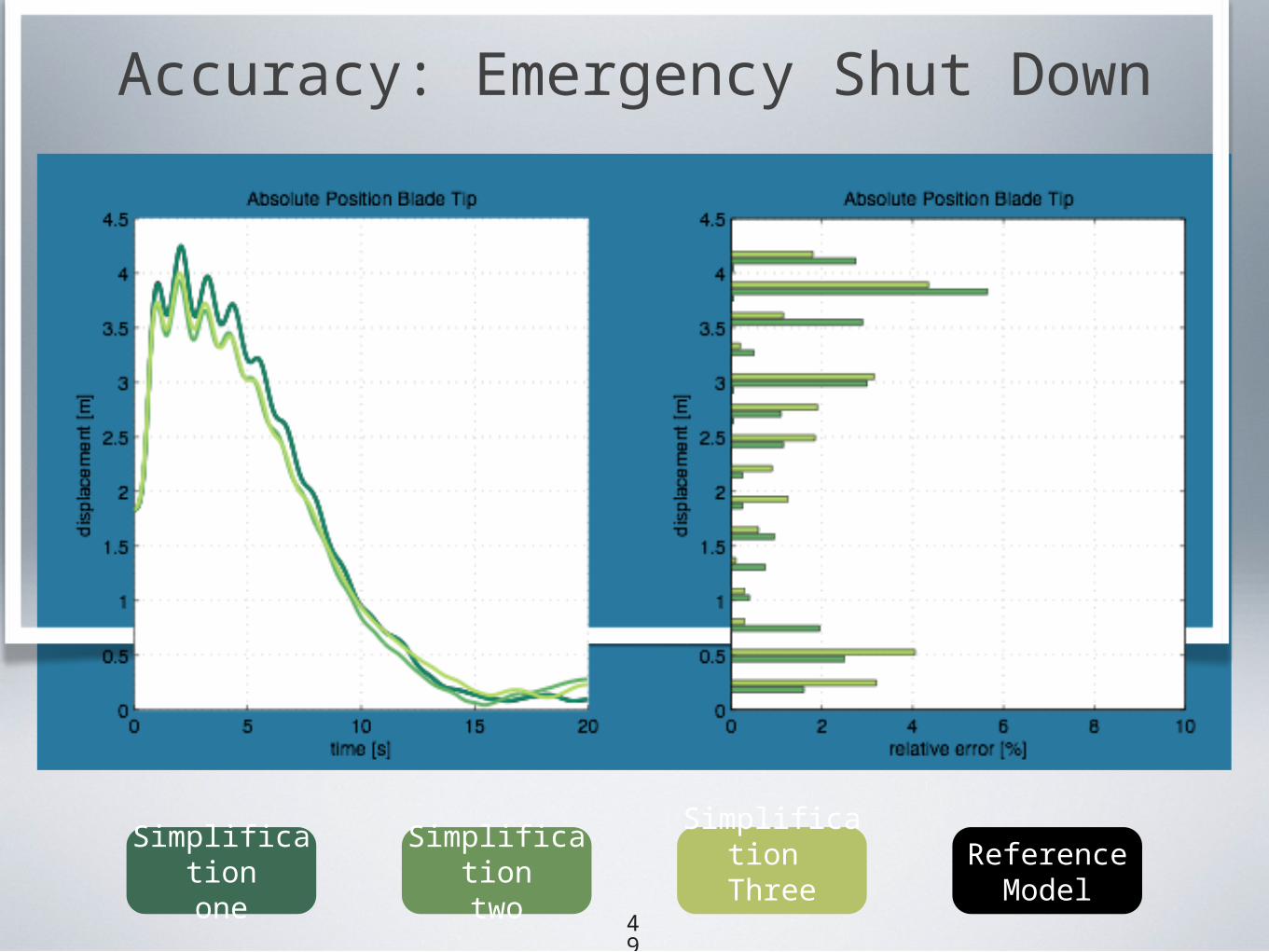
49
Simplificationone
Simplificationtwo
Simplification
ThreeReference
Model
Accuracy: Emergency Shut Down

Simplifications often show negligible differences with
the reference modelmaximum relative difference in mean & standard deviation
<10% <5% <1%
Steady State Three Three Three
Wind Gust Three Three Three
EmergencyShut Down
Two One One
50

Conclusions & Recommendations

Main conclusions
• Simplifications prove that rotational effects can be simplified for dynamic wind turbine models at minimal accuracy loss:
• The SFW model’s CPU speed can be increased up to 140 times in steady cases
• The SFW model’s CPU speed can be increased up to 5 times in transient cases.
• Complete `linearization’ is not possible when external forces are defined in different axes w.r.t. the body they act on 5
2

Main recommendations
• Apply FFR and its simplififcations to the Siemens DSTool
• Investigate simplified FFR applied to models of other wind turbine types
• Investigate simplified FFR for other applications with (‘axisymmetric’) rotating bodies
53

Efficient Modeling of Rotational Effects for Wind Turbine Structural Dynamic Analysis
Diederik den Dekker September 9th 2010

Quadratic velocity vector to ‘virtual dynamic
properties’

Quadratic velocity vector to ‘virtual dynamic
properties’
Qv =Cvij &q+ K v
ijq+ Fvij
Mij&&q +Cv&q+ K + K v( )q=Qe + Fv( )