Embed Size (px)
Citation preview

Efficient Mesh Deformation Using Radial Basis Functionson Unstructured Meshes
Chunhua Sheng∗
University of Toledo, Toledo, Ohio 43606
and
Christian B. Allen†
University of Bristol, Bristol BS8 1TR, England, U.K.
DOI: 10.2514/1.J052126
An efficient mesh-deformation algorithm has been developed within an unstructured-grid computational-fluid-
dynamics solver framework based on a radial-basis-function volume-interpolation method. The data-transfer
problem between fluid and structural solvers is simplified here using a beam structural representation, with surface
mesh deformation given directly via translational and rotational deformations. The volumemesh deformation is then
performed using a radial-basis-function method, which requires no mesh-connectivity information and allows
straightforward implementation in an unstructured computational-fluid-dynamics solver in a parallel fashion.
However, the pure method is impractical for large meshes, and a novel “greedy” data-reduction algorithm is
presented here to select an optimum reduced set of surface mesh points, which makes the mesh-deformation method
extremely efficient. Several two- and three-dimensional test cases are presented to validate the algorithm
performance, including a realistic aircraft Bell M427main rotor. It is shown that the approach can handle effectively
very largemeshdeformations of complexgeometries usingunstructuredviscousmesheswhilemaintaininggoodmesh
quality and geometric accuracy, and generally requires less than 25% of the computational-fluid-dynamics flow-
solver cost.
Nomenclature
A = distance matrix to all basis pointsB = evaluation matrix for computing dis-
placementsd = displacement vector of all mesh point
coordinatesErr = error vector of surface-point displacementsF = vector of inviscid and viscous fluxesf = vector function of mesh-point displacementsL1, L2, L3 = three rotational transformations around x, y,
z axesLr1, Lr2 = transformation matrices in rotor rotational
directionM = transformation matrix from conservative
variables to primitive variablesn̂ = unit normal vector of control volume facesQ � �ρ; ρu; ρv;ρw; ρe�
= conservative flow variables
q � �ρ; u; v;w; p�
= primitive flow variables
r = support radius for radial basis functionst = timex, y, z = mesh-point coordinatesxi = vector of basis-point coordinates for radial
basis functionsΓ−1q = preconditioning matrix
Δ = difference operatorθ = blade flap angle
λi = weighting coefficients of basis pointsφ = blade pitch angleϕ = radial basis functionΨ = blade azimuth angleΩ = rotational speed of rotor
Subscripts
greedy = index for displacement calculated based onbasis points
in = index for original mesh position in inertialframe (undeformed)
max = index for the maximum point displacementn = number of basis pointsr = index for rotational deformationreal = index for displacement obtained by pre-
scribed motionref = index for original mesh position in reference
frame (inertial frame but deformed)
I. Introduction
A NACCURATE prediction of aeroelastic problems requires thecoupling of computational-fluid-dynamics (CFD) tools with
computational-structural-dynamics (CSD) tools. This is particularlytrue in rotorcraft applications, where helicopter rotor blades aretypically long and flexible and, hence, endure large structuraldeformations. The motion of the helicopter rotor blade is complexand includes not only the rigid blade motion, such as cyclic pitch,flap, and rotational motions, but also structural deformation, such asbending and torsion. The complexity of the rotor-blade motioneliminates the possibility of using any rigid mesh movementstrategies and, therefore, an efficient and robust mesh-deformationalgorithm is required for accurate analysis in unsteady rotoraeromechanics.Several mesh-deformation methods have been reported in the
literature, which can be broadly classified into two categories:algebraic methods and partial differential equation (PDE) methods.Algebraic methods include transfinite interpolation (TFI) [1–3],tension spring analogy [4], and torsion spring analogy [5]. The TFImethod, generally used in a structured mesh approach, interpolates
Presented as Paper 2012-2685 at the 42nd AIAA Fluid DynamicsConference and Exhibit, NewOrleans, Louisiana, 25–28 June 2012; received20 June 2012; revision received 25 September 2012; accepted for publication1 October 2012; published online 26 November 2012. Copyright © 2012 bythe American Institute of Aeronautics and Astronautics, Inc. All rightsreserved. Copies of this paper may be made for personal or internal use, oncondition that the copier pay the $10.00 per-copy fee to the CopyrightClearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923; includethe code 1533-385X/12 and $10.00 in correspondence with the CCC.
*Associate Professor, Department of Mechanical Engineering. AssociateFellow AIAA.
†Professor, Department of Aerospace Engineering. Senior Member AIAA.
707
AIAA JOURNALVol. 51, No. 3, March 2013
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

the displacement of mesh points on boundaries along mesh lines tomesh points in the interior computational domain. This method isefficient but not appropriate for unstructured meshes. For the tensionspring analogy, mesh points are viewed as connected with theirneighbors by springs, whose stiffness is proportional to the reciprocalof the length. Clearly, even though this method is mathematicallysimple, it requires mesh-connectivity information. Thus, the meshdeformation using this method involves solving a system ofequations including all mesh points, which makes it too expensivefor large-scale problems. This method also tends to provide poormesh quality for large deformations. To overcome this problem, thetorsion spring analogy attaches torsion springs to each vertex toprevent appearance of negative volumes [5], but at the cost ofcomputational time.Linear elasticity analogies [6,7] are PDE-based methods that solve
partial differential equations at each time step or iteration as amesh ismoved or deformed. However, the performance in terms ofrobustness and efficiency of these methods is quite different ondifferent types of meshes and amplitudes of mesh deformations. Thegeneral approach is that the mesh points are considered to followlinear elasticity equations of solid mechanics, and the deformeddomain is thus viewed as an elastic body. In theory, this method couldbe robust because it links the stiffness of a region to its volume andsets the boundary layer as a solid body. However, in practice, like thetension spring analogy, this method requires mesh connectivity andinvolves solving a system of equations for all mesh points, makingthe method very expensive for large-scale problems. Some simpleralternative methods have been developed based on connectivity-freeapproaches to alleviate the costs of these methods, for example [8,9].Recently, several researchers have studied novel mesh-
deformation methods based on the concept of radial basis functions(RBFs) [10–13]. The RBF methods are well-established forinterpolating scattered data due to their mathematical elegance andthe fact that no connectivity information is required amonginterpolated points. The value of an interpolation function at anypoint in an n-dimensional space is obtained solely based on its spatialposition or distance to the base points, which are usually thedeformed surface points. Therefore, a mesh point in space can bemoved independently from its neighbors using the RBFinterpolation. This feature makes the RBFmethod an ideal candidatefor deforming or moving unstructuredmeshes. However, because themesh-deformation vector interpolated at any point is a globalfunction involving position changes of all base points on the surface,a large system of equations has to be solved, which could beprohibitively expensive if the surface mesh size is very large, forexample, over 100,000 surface points on a volumemesh with severalmillion points.The objective of this study is to develop an efficient methodology
and strategy that significantly reduces the costs to deform large-scaleunstructured meshes, including complicated viscous meshes, whilemaintaining themesh integrity and quality to support an unstructuredmesh CFD solver U2NCLE [14] for solving rotorcraft-relatedaeromechanical problems. In the following, a brief description of theU2NCLE solver will be introduced first, followed by the surface andvolume mesh-deformation methodologies suitable for helicopterrotors. To implement the surface mesh deformation, a simple beammodal representation of the rotor blade is adopted, which includestranslational and rotational deformations to describe the bladerigid motion and structural deformation. For the volume meshdeformation, an effective data-reduction algorithm is consideredhere. Two “greedy” data-reduction algorithms are developed andstudied to reduce the usage of surface mesh points and thus improvethe efficiency of the mesh deformation. These strategies areinvestigated and demonstrated in the present investigation oflarge-scale unstructuredmesheswith fine viscousmesh spacing. Twotest cases, including a NACA 0012 airfoil in two-dimensionaltranslational and rotational movements and a three-dimensionalrotating motion, as well as a realistic Bell aircraft M427main rotor inforward flight, are presented to validate the performance of themesh-deformation methodologies.
II. Governing Equations
U2NCLE [14] is an unstructured-grid CFD solver that solvesthree-dimensional unsteady Navier–Stokes equations in a Cartesiancoordinate system:
MΓ−1q
∂∂t
ZZZq dV �
ZZF · n̂ dA � 0 (1)
where q is the vector of primitive variables,F is the vector of inviscidand viscous fluxes,M is the transformation matrix from conservativevariables Q to primitive variables, and Γ−1
q is a diagonal globalpreconditioningmatrix for computing both low- and high-speed rotorflows, where the system of governing equations is formulated inprimitive variables. The inviscid flux is evaluated using variousspatial discretization schemes. The viscous flux is calculated by thedirectional or normal derivative method on mixed elements. Thenonlinear system of equations is solved by Newton’s method, withsymmetric Gauss–Seidel relaxations implemented at each Newtonsubiteration. The Newton implicit scheme implemented in theU2NCLE solver allows a relatively large time step to be used, up to 1or 2 deg of blade azimuth angle per time step for an unsteadycalculation. The turbulence model used here is the one-equationSpalart–Allmaras turbulence model [15], which is solved separatelyfrom the flow equations at each time step. Details are given in [14].
III. Methodology
A. Surface Mesh Deformation
Before performing the volume mesh deformation, a CFD solvermust first know the mesh deformation on the surfaces or boundariesin the computational domain. This information is obtained here froma structural dynamic analysis code DYMORE [16], which is a finite-element-based CSD tool for computing the nonlinear flexiblemultibody dynamic systems. The ultimate goal of the mesh-deformation study is to develop a coupled CFD/CSD simulation toolbased on U2NCLE and DYMORE for rotorcraft aeromechanicalproblems. One feature in the DYMORE code is that it uses a beammodal representation for the rotor-blade approximation, as shown inFig. 1. With this simplification, the surface point deformation iscalculated based on three translational deformations (Δx, Δy, Δz)and three rotational deformations (Δϕ, Δθ, ΔΨ) on the blade beammodal nodes (CSD), which are along the blade quarter-chord lengthcomprising the lifting line for all air station points (CFD). This avoidsthe traditional expensive interpolation procedure between CFD andCSD meshes. These deformations are written as a function ofazimuthal angles at all radial air stations. The blade surface motionsor deformations are obtained using a bilinear interpolation from theCSD beam nodes to the CFD air station points. The rotational
Fig. 1 Diagram of an aerodynamic model of CFD/CSD coupling.
708 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

deformations are applied to the initial undeformed mesh followingthe x-y-z sequence of the Euler angle rotation around the referencepoint as follows [17]:
"xyz
#r
� Lr1
""xyz
#in
−
"xyz
#ref
#(2)
where
Lr1 � L3�−Δψ�L2�Δθ�L1�−Δϕ�
�
26664CS · CT −SS · CF� ST · CS · SF SS · SF� ST · CS · CF
SS · CT CS · CF� SS · ST · SF −CS · SF� SS · ST · CF
−ST CT · SF CT · CF
37775
and
CS � cos�Δψ�; CT � cos�Δθ�; CF � cos�Δϕ�SS � sin�Δψ�; ST � sin�Δθ�; SF � sin�Δϕ�
The index “in” for the surface mesh coordinates (x, y, z) refers tothe initial blade positionwithout any precone (steady flapping) angle,elastic deformation, flapping, and pitch control input, but with thebuilt-in blade-twist angles. The index “ref” denotes the referencepoint, which is placed at 0 deg azimuth. The deformed surface meshat a given azimuth angle is obtained by applying the lineartransformation and rotational deformation around pitch, flap, androtational axis as follows:
"xyz
#� Lr2
""xyz
#r
�"xyz
#ref
�"ΔxΔyΔz
##(3)
where
Lr2 � L3�−ψ�L2�θ�
�
26664cos�ψ� cos�θ� − sin�ψ� − cos�ψ� sin�θ�sin�ψ� cos�θ� cos�ψ� − sin�ψ� sin�θ�
sin�θ� 0 cos�θ�
37775
In the previous formula, ψ is the azimuth angle (positive,counterclockwise from top view), and θ is the precone angle(negative, flap up). After the motion and deformation is determinedon the blade lifting line, a linear interpolation is employed to obtainthe deformed surface coordinates at all CFD mesh points.
B. Volume Mesh Deformation
With the surface mesh deformation obtained in the previousprocedure, the volumemesh deformation is then performed using theRBF method, which is the major approach presented in this study.The RBF method allows global volume mesh interpolationthroughout an n-dimensional space, which is solely based on thespatial coordinates of discrete base points and does not require anyconnectivity information among them. For this reason, it has beenpopular for interpolation of scattered data in many scientific fields,for example computer graphics [18] and the numerical solution ofPDEs [19]. The general form of the RBF interpolation can beexpressed as
f�x� �Xni�1
λiϕ�kx − xik� � P�x� (4)
where f�x� is the vector function of mesh displacements to beinterpolated at any point x based on the base points xi, with n as thenumber of base points where the functionvalues are known; λi are theweighting coefficients for the base points. The symbol k · k denotesthe Euclidean norm between two vectors, andϕ� � is the chosen radialbasis function, which will be discussed later. In the case of meshdeformation, the base points for the RBF functions are the surfacemesh points. The procedure here is to calculate the meshdisplacement for each volume mesh point based on the motion ordeformation of all surface mesh points, which have been obtained inthe preceding section. It should be noted that an optional polynomialP�x� can be included in Eq. (4) to guarantee certain properties of theinterpolation. As an example, RBFs have been used extensively inCFD–CSD coupling. In that case, it is vital to conserve force,moment, and energy in the interpolation, and including a polynomialcan ensure this. However, in the case of mesh deformation, a localeffect is required rather than a global one, and so a polynomial is notnecessary.For a three-dimensional mesh-deformation problem, three
interpolation functions are needed, one for each coordinate. Theweighting coefficients λi are computed in such a way to ensure thatthe interpolated function values f�x� at all base points are recoveredexactly, which are equal to the surface mesh displacements. Thisrequirement can be expressed mathematically as
f�xi� � d�xi� (5)
whered is the vector of the knownmesh displacement at point i. If theequation is written for all surface mesh points, one has the followinglinear system of equations (the polynomial is not included here):
Aλx � dx Aλy � dy Aλz � dz (6)
and
dx � �Δxs1 ;Δxs2 ; : : : ;Δxsn �T dy � �Δys1 ;Δys2 ; : : : ;Δysn �T
dz � �Δzs1 ;Δzs2 ; : : : ;Δzsn �T
A �
26664ϕs1s1 ϕs1s2 · · · ϕs1snϕs2s1 ϕs2s2 · · · ϕs2sn... ..
. ... ..
.
ϕsns1 ϕsns2 · · · ϕsnsn
37775
In the basis function distance matrix A above, ϕsisj � ϕ�disij∕r�,where disij is the distance between surfacemesh point i and j, and r isthe support radius, which should be greater than the largest distanceamong all volume mesh points to the base points on the surface.There are many choices for the radial basis function to be used. In
the current study, the popular Wendland’s C2 function [20] is useddue to its elegant compact support property, which means that itautomatically ensures strictly symmetric positive definite for thebasis function matrix A [21]. In addition, the support radius isappropriately chosen, an ill-conditioned matrix A can be avoidedeven for a very large-scale problem. However, it should be noted thatsome radial basis functions can make the distance matrix ill-conditioned. The system equation [Eq. (6)] can be solved usingseveral methods, such as a direct method and iterativemethod. In thisstudy, a direct method based on lower-upper decomposition isemployed to solve the system of equations exactly, taking advantageof the fact that the distance matrix A is identical in all x, y, and zdirections. Some of the popular Wendland’s radial basis functionswith compact support are listed in Table 1.The aforementioned support radius is the distance from each center
at which the basis function decays to zero. Hence, the zone ofinfluence of each center is a sphere of radius r, and increasing rincreases the region over which the mesh deformation affectsthe surrounding mesh. Increasing this value thus results in an
SHENG AND ALLEN 709
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

increasingly global and smooth deformation but an increasinglypoorly conditioned basis matrix.After obtaining the weighting coefficients for all surface mesh
points, the displacement of volume mesh points can be calculatedwith Eq. (4). If this equation is written for each volume mesh point,the following system of equations can be obtained:
Δx � Bλx Δy � Bλy Δz � Bλz (7)
where
Δx � �Δxv1 ;Δxv2 ; : : : ;Δxvn �T Δy � �Δyv1 ;Δyv2 ; : : : ;Δyvn �T
Δz � �Δzv1 ;Δzv2 ; : : : ;Δzvn �T
and
B �
26664ϕv1s1 ϕv1s2 · · · ϕv1snϕv2s1 ϕv2s2 · · · ϕv2sn... ..
. ... ..
.
ϕvns1 ϕvns2 · · · ϕvnsn
37775
Here, in the evaluation matrix B, for the basis points,Δx,Δy, andΔzare the mesh displacements of volume mesh points in the x, y and zdirections, respectively. Equation (7), demonstrates that the solutionof the volume mesh displacement is actually a matrix multiplication,which is very computationally efficient to perform. It should be notedthat the B matrix is never computed and stored, but is applied on arow-by-row basis, i.e., Eq. (4) is used for each mesh point. Afterobtaining the mesh-deformation displacements on all volume meshpoints with the previous equations, the mesh coordinates are updatedto form a new deformed mesh for the CFD computations.
IV. Greedy Algorithm
A conventional RBFmethod would use all surface mesh points, asdescribed in Sec. III.B, to calculate the weighting coefficients andthen deform the volume mesh points. However, for large-scaleunstructured-grid problems, the number of surface mesh points mayreach several hundreds of thousands, which would result in a verylargeRBF system, and the cost to solve this systemof equations couldbe prohibitively high. In addition, if themesh deformation is requiredat each time step, such as in an unsteady rotor flow in forward flight,the computational costwould be unacceptable. Tomake conventionalRBF methods suitable for large-scale unsteady mesh deformations,the size of the system of equations or number of base surface meshpoints must be reduced. Fortunately, through a greedy-type data-reduction algorithm [11], it is possible to use significantly fewersurface mesh points as the base points to approximate the surfacedeformation. The typical procedure of a greedy algorithm may bedescribed as follows:1) Choose a subset of surface mesh points to start the greedy
algorithm.2) Deform the surface mesh points based on the reduced subset of
surface mesh points.3) Calculate the displacement error (residual) at all surface mesh
points.4) If the global displacement error is larger than a given criterion,
add the surface point with the largest displacement error to thesubset list.
5) If the global displacement error is smaller than a given criterion,then stop the search algorithm.6) Repeat steps 2 through 5.Clearly, this procedure is greedy because the surface mesh points
with the largest displacement error at each loop are selected as thebase points. The selection of base points in the greedy algorithmdepends on the definition of the global displacement error. A generaldefinition of the global displacement error on all surface mesh pointsis given as
Err ����������������������������������������Err2x � Err2y � Err2z
q(8)
where Errx, Erry, and Errz are displacement errors from x, y, and zdirections, respectively. In the present study, two ways to calculatethe displacement errors are investigated, and their influences on theaccuracy, robustness, and efficiency of the mesh deformation arecompared and investigated.
A. Real Surface Displacement Method
In the real surface displacement method, the displacement error ofa surface mesh point is the difference between the actual (exact)displacement of a surfacemesh point and the computed displacementof the same mesh point. The actual displacement of a surface meshpoint is either prescribed or obtained from a CSD code, whereas thecomputed (greedy) displacement of the surface mesh point iscalculated based on the reduced subset of base surface points selectedby the greedy algorithm. Because of the nature of the RBFinterpolation, only the surface points that are selected as the basepoints are fully recovered (no displacement error). Thus, the realsurface displacement has a straightforward physical meaning on howwell the deformed geometry is approximated using the greedyalgorithm. The real surface displacement errors in the x, y, and zdirections can be calculated as [11]
Errx � Δxreal − Δxgreedy Erry � Δyreal − ΔygreedyErrz � Δzreal − Δzgreedy (9)
where the subscript “real” denotes the exact displacements that areprescribed or obtained from the surface deformation of a CSD code,and “greedy” stands for the computed displacement using theinterpolation using the reduced dataset selected by the greedyalgorithm. Thus, either a maximum or an average displacement erroron all surface mesh points may be used to monitor the accuracy of adeformed surface geometry. Attention must be paid to the criterionselected to stop the greedy algorithm, in particular for large-scaleviscous mesh deformations. A typical greedy algorithm based on thereal surface displacement method in an unsteady problem may beexpressed as Algorithm 1.Shown in Fig. 2 is the reduced subset of surface mesh points for a
simple rotor geometry obtained by the real displacementmethod. It isseen that the displacement errors can be used as a monitor to the
Table 1 Popular Wendland’s radialbasis functions
C0 ϕ�ξ� � �1 − ξ�2C2 ϕ�ξ� � �1 − ξ�4�4ξ� 1�C4 ϕ�ξ� � �1 − ξ�6�35ξ2 � 18ξ� 3�C6 ϕ�ξ� � �1 − ξ�8�32ξ3 � 25ξ2 � 8ξ� 1�
Algorithm 1
Do time step � 1, N stepsCompute or read in surface deformationChoose an initial surface point as the starting base pointBase Point � 1Do while (displacement error criterion not satisfied)Perform RBF interpolation for all surface points based on reduced subset ofbase pointsEvaluate real displacement error at each surface pointSelect point with the largest displacement error and add it to the listBase Point � Base Point� 1End doCompute volume deformation using reduced subset of base pointsUpdate the volume meshCompute flow solutionEnd do
710 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

geometric error generated by the greedy algorithm for RBFinterpolation.
B. Constant Displacement Method
It is not difficult to understand that the quality of the final deformedmesh is very much depended on the reduced subset of surface meshpoints for the RBF interpolations. The philosophy of the realdisplacement method described previously is to build the subsetpoints solely based on the surface mesh points that would generatethe largest displacement errors with the RBF interpolations. Anotherway to calculate the subset of surface points is based on a constantdisplacement method, similar to the unit function method proposedby Rendall and Allen [11]. However in this method, the targetdisplacement is given based on the difference between the maximumdisplacement and the surface displacement calculated by the greedyalgorithm. The maximum displacement is precalculated from theprescribed motion or the CSD output data. Thus, the definition of theconstant displacement errors in x, y, and z directions are given as:
Errx � Δxmax − Δxgreedy Erry � Δymax − ΔygreedyErrz � Δzmax − Δzgreedy (10)
The advantage of the constant displacement method is similar to theunit functionmethod [11],whichwill result inmore base points beingselected on surfaces where the curvatures are high. This could bebeneficial in complex geometrieswheremore base points are selectedat the blade tip and the leading and trailing edges; see Fig. 3. Themajor advantage of this approach is that the base points can beprecalculated before the unsteady simulations because, unlike theprevious real displacement method, the base-point selection is notdirectly linked to the actual geometry. This gives a significant savingsin computational costs because the base-point selection by greedyalgorithms is very expensive. However, the drawback of this methodis the loss of the true physical meaning in the displacement errors,whichmakes itmore difficult to select the stop criterion for the greedyalgorithm. A typical algorithm for the constant displacement methodin an unsteady problem may be given in Algorithm 2.In the following, the criterion to stop both greedy algorithms will
be further discussed, and a new strategy to correct the surfacegeometry errors will be introduced.
C. Criterion for Greedy Algorithm
Clearly, the base-point selection is the most important part of theRBF interpolation methodology, which has a direct impact on theefficiency as well as the quality of the mesh-deformation method. Inthe real displacementmethod, the criterion for the greedy algorithm isdetermined based on the largest or mean displacement error, whichshould be equivalent to the finest mesh spacing generated in thecomputational domain. This is important to ensure the geometryintegrity and to avoid the negative control volumes in viscous flowcomputations. In the constant displacement method, because nophysical meaning is related to the displacement error, Rendall andAllen [11] suggested a fixed number of base points to stop the greedyalgorithm. In other words, if the number of selected base points islarger than a given number, the point selection algorithm will stop.Clearly, some numerical experiments are needed to have goodknowledge on the number of base points needed for a givengeometry.Consideration of the number of selected base points is presented later.
V. Parallelization Issue
The RBF mesh-deformation method does not require mesh-connectivity information, and this feature makes the method ideallysuited to parallelization. As discussed in the preceding sections, theRBF mesh deformation involves the following three major steps:1) Select the base surface points using one of the greedy
algorithms.2) Calculate the weight coefficient for each volume mesh point.3) Update the volume mesh point coordinates to form a new
deform computational mesh.As will be demonstrated later in Sec. VI, the majority of
computational costs are incurred in step 1, i.e., the greedy algorithmfor the base-point selection. In theory, one would wish to use parallelprocesses to speed up the base-point selection, i.e., to select a group ofbase points with the largest displacement errors in each processor at atime, rather than to select only one base point with the largestdisplacement error among all processors at a time. The problem withthe parallel base-point selection is that it may result in a larger subsetof base points for the same displacement (geometric) error than whatmight be generated in the sequential search mode. A larger subset ofbase points will increase the size of the RBF linear system ofequations and consequently increase the costs to compute theweighting coefficients and deform the mesh points in steps 2 and 3.This may increase the overall computational costs for the mesh-deformation method. For this reason, only steps 2 and 3 areimplemented in parallel mode. The step 1 for the base-point selection
Fig. 2 Original surface mesh and base points selected using real displacement errors.
Fig. 3 Original surface mesh and base points selected using constant displacement errors.
SHENG AND ALLEN 711
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

is still implemented in sequentialmode to ensure that the least amountof base points are selected for a given criterion.
VI. Results and Discussions
A. NACA 0012 Rotor in Sudden Transitional and Rotational Motions
To validate the performance of the mesh-deformation method, asimple two-dimensional meshmovement of a NACA 0012 rotor [22]is considered first, as shown in Fig. 4. The computational meshcontains mixed-element cells, with hexahedrons and prisms in theboundary layers and tetrahedral cells in the isentropic region off theblade surface. The blade is constructed by aNACA0012 airfoil at thecenter of the domain and surrounded by an interior cylinder surface todefine the outer fixed boundary. The diameter of the cylinder is fivetimes the chord length of the airfoil. The interior cylinder surface isembedded by another half-cylinder as the far-field boundary.The total number ofmesh nodes in the deformed region is 379,170,
with 25,121 nodes on the blade surface. The numerical tests includedthe mesh movements due to rigid body translation and rotation of theairfoil. To demonstrate the efficiency and robustness of the mesh-deformation approach, the mesh movements performed here arecompleted in just one step without intermediate and consecutivetransitions. Because the value of the support radius may influence thequality and robustness of the RBF approach, the support radius ischosen at a fixed value of one blade radius in the present study. Thecriteria to stop the base-point selection are set to 5 × 10−4 in bothAlgorithms 1, 2. For Algorithm 2, a maximum displacement iscomputed based on a characteristic length of 10 times the bladeradius.The RBF mesh-deformation method presents a different
computational problem than other methods, such as the tensionspring and linear elasticity analogies. In those approaches, a globalsystem must be solved, i.e., the size of the number of volume meshpoints, whereas the current approach the computational cost isdependent on solving a system the size of the number of surfacepoints controlling the motion (and then using the resulting weighting
coefficients to move each volume point), and this number issignificantly reduced due to the use of the greedy algorithm. Thegreedy algorithm makes a huge reduction of the surface mesh points(down to 2% or less of the original surface points) being used tocompute weighting coefficients. (More information on costs ispresented later.) Shown in Fig. 5 are deformed meshes after one-steptranslational movement of the airfoil in upward direction for adistance of 0.1Rcyl and 0.2Rcyl (Rcyl is the radius of the cylinder),respectively, where the interior cylinder surface is fixed. Comparingwith the original mesh, the deformed meshes preserve a validconnectivity and smoothness in the boundary layers even after such alarge step motion. The variation of the greedy algorithm residualswith respect to the number of base points selected is shown in Fig. 6.It is seen that the residual is reduced more quickly at the initial stageusing Algorithm 2 and then tends to the same level as Algorithm 1.Shown in Fig. 7 are the deformed meshes after one-step rotationalmovements of the airfoil by 20 and 40 deg in a counterclockwisedirection, respectively, where the interior cylinder surface is alsofixed.Again, smooth and valid deformedmeshes aremaintained aftera large-step rotational movement of the blade. Excellent meshorthogonal property is preserved inside the boundary layer withoutany skewed cells and negative volumes. A similar residual behavioron the greedy algorithms (Algorithms 1, 2) is observed in Fig. 8. Thenumerical tests conducted here indicate that the RBF interpolationmethod with the greedy algorithms presented is extremely robust indeforming unstructured viscous meshes enduring large and suddentransitional and/or rotational motion and deformation.The computational costs and selected base points for the mesh
deformation are compared in Table 2, where the cost unit is the CPUtime required for the CFD solution for one time step. Allcomputations are carried out in parallel using 16 processors on aLinux cluster. In general, computational costs are a little higher usingthe constant displacement error method (Algorithm 2) than using thereal displacement error method (Algorithm 1). This is becauseAlgorithm 2 tends to select more base points than Algorithm 1 for thesame convergence criterion. It should be noted that the efficiency ofAlgorithm 1 is dependent on mesh deformation or motion, wheremore base points will be selected for larger motions. However, themesh deformation and motion have less of an impact on Algorithm 2and therefore the computational cost. This feature may be beneficialin saving computational time for large-scale mesh deformations.However, the real challenge forAlgorithm2 is to select a convergencecriterion for differentmeshmotions that satisfies the requirements forall deformed meshes on the efficiency, accuracy, and integrity.
B. NACA 0012 Rotor in Cyclic Pitching Motion
In the previous case, the ability of the RBF mesh deformation isdemonstrated in deforming computational meshes with a one-steplarge transitional and rotational motion. The mesh-deformationmethod seems to be very robust but is not coupled with any CFDsolution process. The present case is to study the mesh-deformationmethod in CFD simulations for an unsteady rotor motion with theblade undergoing cyclic motion. There are two purposes to this
Algorithm 2
Choose initial surface pointBase Point � 1Do while (error criteria not satisfied)Perform RBF interpolation for all surface points based on reduced subset ofbase pointsEvaluate constant displacement error at each surface pointSelect point with the largest displacement error and add it to the listBase Point � Base Point� 1End doDo time step � 1, N stepCompute or read in surface deformationCompute volume deformation using preselected base pointsUpdate the volume meshCompute flow solutionEnd do
Fig. 4 NACA 0012 airfoil interior surface and unstructured volume mesh.
712 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

Fig. 5 One-step translational movements in 0.1Rcyl (upper) and 0.2Rcyl (lower).
0 100 200 300 400 500Number of base points
1e-05
0.0001
0.001
0.01
0.1
Gre
edy
resi
dual
translate 0.1Ch, Algorithm 1translate 0.2Ch, Algorithm 1
0 100 200 300 400 500Number of base points
1e-05
0.0001
0.001
0.01
0.1
Gre
edy
resi
dual
translate 0.1Ch, Algorithm 2translate 0.2Ch, Algorithm 2
Fig. 6 Variation of greedy algorithm residuals in translational movements.
Fig. 7 One-step counterclockwise rotations by 20 deg (upper) and 40 deg (lower).
SHENG AND ALLEN 713
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

numerical test. One is to verify that the rotor-blade cyclic motionperformed by the mesh-deformation method coincides with themotion by a rigid sliding interface in the U2NCLE code [14]. Thesecond purpose is to validate the efficiency of options (Algorithms 1,2) on a realistic unsteady motion in viscous flow computations. If therotor blade rotates around the rotational axis, the blade cyclic motioncan be expressed as [23]
φ�t� � φ0 � α1: sin�2πft� ϕ� � α2: cos�2πft� ϕ�θ�t� � θ0 � α3: sin�2πft� ϕ� � α4: cos�2πft� ϕ�ψ�t� � Ω:t (11)
where φ, θ, and ψ are the blade pitch, flapping, and azimuth angles,respectively;Ω is the angular rotating velocity; f is the frequency; ϕis the phase angle; φ0 and θ0 are the blade collective and coningangles, respectively; and αi�1 ≤ i ≤ 4� are the blade motion controlangles. In the current computation, the blade control angles are set asfollows: α1 � −7.65 deg and α2 � −0.96 deg, α3 � 0.0 deg andα4 � 0.0 deg. Therefore, only the cyclic pitching but no flappingmotion is considered in this case.To validate the efficiency and accuracy of the mesh deformation,
the blade motions and computed results are compared with thatobtained by using the sliding-interface method. The general flow-solver settings with the mesh deformation are the same as that withthe sliding-interface method, which can be summarized as follows:the inviscid flux is evaluated with a second-order Roe scheme, whilethe time advancement is carried out with a second-order temporalaccuracy using the Newton’s method. A series of Newtonsubiteration (3 ∼ 4) are performed to ensure the temporal accuracyfrom time step n to n� 1, where 6 ∼ 8Gauss–Seidel relaxations areused to converge the linear solution at each time step.All the unsteady computations (including the mesh-deformation
and sliding-interface methods) are started from a converged steady-state solution, which is obtained with a local CFL number using twoNewton iterations per time step for one rotor revolution. This solutionis considered to be sufficient as an initial solution for the unsteadycomputations. For themesh-deformationmethods, the support radiusand the criterion to stop greedy algorithm are chosen in the samewayas in the previous case. Notice that a maximum displacement isnormalized by a characteristic length of 10 times the blade length inAlgorithm 2. Although both algorithms work very well, they dodemonstrate different behavior in terms of efficiency.
Shown in Fig. 9 is the comparison of the deformed mesh after90 deg rotation in azimuth obtained by the mesh-deformation andsliding-interface methods. The results indicate an identical bladeposition and a mesh quality in the deformed mesh comparable to thesliding-interface method, including the boundary layers. Clearly, themesh-deformation approach has precisely repeated the blade surfaceand volumemotion as predicted by the sliding-interfacemethod. Thiscan be further demonstrated in Fig. 10 by comparing the force andmoment coefficients predictedwith both approaches. The normalizedrotor thrust coefficient (CT), pitching moment coefficient (CMX), rollmoment coefficient (CMY), and torque coefficients coefficient (CMZ)are in a good agreement with each other, except for a slightdiscrepancy on the peak thrust. It is also noticed that, with a smallergreedy criterion, the solutions of the two greedy algorithms quicklyapproach the solution of the sliding interface. An interestingphenomenon to note in Fig. 11 is that Algorithm 1 is able to maintaina constant level of surface errors at the specified value (left figure) butrequires different numbers of base points at each time step during thesolution process to satisfy this condition (right figure). However, inAlgorithm 2, because the subset of base points is preselected and notupdated in the solution process, the displacement errors generated byAlgorithm 2 cannot be maintained at a constant level throughout thecomputation, shown as the periodic pattern in Fig. 11. Thisphenomenon is important to understand the behavior of the twomethods, and explains why more base points are usually selected byAlgorithm 2 than Algorithm 1 for the given surface error criterion.The computational costs are compared in Table 3 between two
mesh-deformation algorithms for the NACA 0012 rotor in cyclicmotion. The computational costs are divided into threemajor groups:1) the greedy algorithm for the base-point selection, 2) surface andvolumemesh deformation, and 3) cost of the CFD solution only. Thenumbers shown in the table are the CPU times (in seconds) for therotor over one revolution of motion using 16 parallel processors. Itshould be noted that the base-point selection by Algorithm 1 isperformed at every time step, whereas the base-point selection byAlgorithm 2 is performed only once at the beginning of thesimulation. The cost ratio is defined as the sum of the CPU times ofthe greedy algorithm of the base-point selection (Algorithm 1) andthe surface and volumemesh deformations over the CPU time for theCFD solution only. It should be noted that the CPU time for the base-point selection in Algorithm 2 is ignored in the cost ratio because thisprocedure is performed outside the simulation loops. It is seen that thecomputational costs are quite different between two algorithms evenwith the same criterion. In general, the base-point selection by both
0 100 200 300 400 500Number of base points
1e-06
1e-05
0.0001
0.001
0.01
0.1
Gre
edy
resi
dual
rotate 20 deg, Algorithm 1rotate 40 deg, Algorithm 1
0 100 200 300 400 500Number of base points
1e-06
1e-05
0.0001
0.001
0.01
0.1
Gre
edy
resi
dual
rotate 20 deg, Algorithm 2rotate 40 deg, Algorithm 2
Fig. 8 Variation of greedy algorithm residuals in rotational movements.
Table 2 Computing time and greedy points selected in one time step
Case Criterion Base point (Algorithm 1/Algorithm 2) CPU time (Algorithm 1/Algorithm 1)
Translational move 0.1 chord length 5.0e−4 212∕290 1.99∕3.41Translational move 0.2 chord length 5.0e−4 289∕290 2.95∕3.41Counterclockwise rotate 20 deg 5.0e−4 193∕290 1.73∕3.41Counterclockwise rotate 40 deg 5.0e−4 259∕290 2.46∕3.41
714 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

greedy algorithms costs over 80% of the computational time in themesh-deformation process. The CPU times for the surface andvolumemesh deformation are about the same between Algorithms 1,2 if the same number of base points is selected. Overall, the cost ratios
for the mesh deformation range from 65 to 145% with Algorithm 1and 14 to 20% with Algorithm 2, compared to the cost of the CFDsolution in the current unsteady rotor flow simulation. Certainly,Algorithm 2 is more computationally efficient than Algorithm 1
Fig. 9 Comparison of mesh deformation method (upper) with sliding-interface method (lower).
0 60 360azimuthal angle (degree)
-0.002
0
0.002
0.004
CM
Y
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface
0 60 360azimuthal angle (degree)
-0.002
-0.0015
-0.001
-0.0005
0
0.0005
CM
Z
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface
0 60 360azimuthal angle(degree)
-0.005
0
0.005
0.01
0.015
0.02
0.025
CT
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface
0 60
120 180 240 300 120 180 240 300
120 180 240 300 120 180 240 300 360azimuthal angle(degree)
-0.006
-0.004
-0.002
0
CM
X
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface
Fig. 10 Comparisonsof normalized thrust (CT), pitchingmoment (CMX), rollmoment (CMY), and torque (CMZ) coefficients forNACA0012 rotor in cyclicmotion.
SHENG AND ALLEN 715
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

because the base-point selection by the greedy algorithm isperformed only once, even though the error is comparable to or lowerthan that of Algorithm 1.
C. M427 Main Rotor in Forward Motion
To demonstrate the efficiency and accuracy of the current meshdeformation for large-scale complex unsteady motions, a realisticBell M427 main rotor in forward flight [24] is investigated. Theobjective of this validation is to evaluate the performance andsuitability of the current mesh-deformation algorithm and strategyapplied to coupled CFD/CSD simulations for helicopter rotors inrealistic flight conditions. Both rigid-blade motion and deflectedblade motion are investigated with the current mesh-deformationmethodology. Again, computational results are compared with thesliding-interface method to ensure the accuracy of the blade motionand the deformed geometry.TheM427main rotor-blade geometry has a complex blade contour
and a flap fin in the middle of the blade, as shown in Fig. 12. Thecomputational mesh contains an interior surface embracing the rotorblade, which is served as the sliding interface for the rigidmotion andthe fixed outer boundary for the mesh deformation. The M427 mainrotor has the following control angles in forward flight: collectiveangleφ0 � 10.04 deg and coning angle θ0 � 2.619 deg. The bladecyclic motion is defined by Eq. (11), with the cyclic pitching anglesα1 � −7.65 deg and α2 � −0.96 deg and cyclic flapping anglesα3 � 3.211 deg and α4 � −0.421 deg.Themain rotor has four blades with a long blade radius of 5.625m,
a blade tip Mach number of 0.691, and an advanced ratio of 0.306 inthe forward flight. The computational mesh is built for a single rotorblade in a quarter-azimuthal space with 7,937,491 volume nodes,25,757,046 cells, and 668,702 surface points. A single blade is usedin the computational mesh, and so a free-wake model [25] is used toaccount for thewake effects generated by other rotor blades. Becausethe flow is turbulent, a very fine grid spacing (1 × 10−5) is used toprovide a y� value of 1 on all solid blade surfaces. In the currentunsteady simulations, three to four Newton iterations and six to eightGauss–Seidel relaxations are usedwith aminimum time step of 1 degof azimuth angle per time step. The computational mesh is deformed
at every time step corresponding to the blade deformation, where aconverged solution is reached after six to eight rotor revolutions.Computations for the M427 rotor in forward flight are performed
with both options (Algorithms 1, 2) at different convergence criteriato examine their efficiency, accuracy, and computational costs onmesh deformations. Shown in Fig. 13 are the deformed volumemeshes at instantaneous blade position of 90, 180, 270, and 360 degazimuth undergoing cyclic pitching and flapping, where the interiorcylindrical surface is served as the outer fixed boundary for thedeformed region. Because of the confined space within the interiorsurface, the volume mesh points are highly packed as the blade isflapped upward at 360 deg azimuthal position. Although the meshquality is not desirable in this situation, it does demonstrate therobustness of the current mesh-deformation method to handlecomplicated viscous mesh motion and deformation under very
0 60 120 180 240 300 360azimuthal angle (degree)
200
300
400
500
600
700
num
ber
of b
ase
poin
ts
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4
0 60 120 180 240 300 360
azimuthal angle(degree)
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008
max
imum
sur
face
err
or
ALG 1, criterion=1e-4ALG 1, criterion=2.5e-4ALG 1, criterion=5e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4
Fig. 11 Comparisons of maximum surface errors (left) and base points (right) for NACA 0012 rotor.
Table 3 Computational costs for NACA 0012 rotor in cyclic pitching
Case 1 2 3 4 5 6Option Algorithm 1 Algorithm 1 Algorithm 1 Algorithm 2 Algorithm 2 Algorithm 2Criterion 5e−4 2.5e−4 1e−4 5e−4 2.5e−4 1e−4
Maximum base points 278 330 533 283 406 652Greedy algorithm time (A) 778 1119 2297 2.20 3.82 7.80Mesh-deformation time (B) 209 245 299 216 274 324CFD solver time (C) 1584 1584 1584 1584 1584 1584Cost ratioa 62% 86% 145% 14% 17% 20%
aCost ratio: Algorithm 1 � �A� B�∕C; Algorithm 2 � �A� B�∕C.
Fig. 12 Bell 427 main rotor geometry and interior surface mesh.
716 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

restricted spaces. However, this situation can be easily alleviated byexpanding the outer boundaries for the deformed volume meshregion.To determine the requirements on the displacement error or the
number of base points for the current mesh deformation to satisfy thegeometric accuracy and blade motion, a series of numerical tests areperformed at various criteria of the displacement errors, similar to theprevious case conducted on the NACA 0012 rotor. Shown in Fig. 14are the normalized rotor thrust coefficient (CT), hub pitchingmomentcoefficient (CMX), hub rollmoment coefficient (CMY), and hub torquecoefficient (CMZ) obtained by both options (Algorithms 1, 2). Ingeneral, a smaller convergence criterion or displacement error thanthe previous case is required to accurately predict the forces andmoments for the M427 rotor in forward flight. This means that morebase points are selected to accurately preserve the blade geometry andmotion in complicated unsteady motions. As shown in Fig. 14, anerror criterion of 5 × 10−5 in Algorithm 1 or 1 × 10−4 in Algorithm 2is required to accurately predict the force and moment coefficients aspredicted by the sliding grid motion. The same interestingphenomenon as the previous case is noticed in Fig. 15. Thedisplacement error in Algorithm 1 is maintained constant at thespecified value, which requires different numbers of base points ateach time step to satisfy this condition. However, the displacementerror in Algorithm 2 cannot be maintained at the same levelthroughout the computation, as shown by periodic patterns in Fig. 15,because the subset of base points is preselected and not updatedthereafter.The computational costs using Algorithms 1, 2 at different criteria
are listed in Table 4. Both methods give comparable results, but thecost of using Algorithm 2 is significantly less than Algorithm 1. Themajor reason is that the cost of the greedy algorithm for base pointselection is very expensive. Even if using Algorithm 2, thecomputational costs increases rapidly with the number of base points(discussed later). Fortunately, computational results indicate that thenumerical accuracy for both blade geometry and motion are satisfied
at the criterion set forth in the simulations, with less than 25%of extracosts due to the mesh motion and deformation (Algorithm 2). Anoption to improve the efficiency of Algorithm 1 is to freeze the base-point selection for a certain time period during the simulation, forexample every 30 deg azimuth of the rotor motion, which wouldsignificantly reduce the over cost because this is the most expensiveprocess in the RBF mesh deformation.
D. Cost Analysis
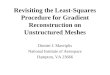
For the aforementioned M247 case, the costs in terms of operationsare now presented. The approximate cost scaling of the greedy pointselection algorithm, in termsof the number of surface points selected, is
Nop ∼XNseln�1�n3 � n:Nsurf� (12)
whereNsurf � 668; 702 here, and this variation is presented in Fig. 16(left) for up to 10,000 selected surface points,Nsel. Hence, as expected,the cost of the system-solution component of the algorithm tends toO�n4�, and the surface evaluation stage, to compute the error at eachsurface point, tends to O�n2�. Clearly, the surface update costoutweighs the system solution until the point where
XNseln�1
n3 � Nsurf
XNseln�1
n (13)
The approximate cost scaling of the volume mesh update scheme,in terms of the number of surface points selected, is
Nop ∼ N3sel � Nsel:Nvol (14)
where Nvol � 7; 937; 491 here, and this variation is presented inFig. 16 (right), again for up to 10,000 selected surface points. It is
90º azimuth angle 180º azimuth angle
270º azimuth angle 360º azimuth angle
Fig. 13 Cutting plane of deformed volume meshes at 90, 180, 270, and 360 deg azimuthal angles.
SHENG AND ALLEN 717
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

0 60 120 180 240 300 360
azimuthal angle(degree)
-0.001
-0.0005
0
0.0005
0.001
0.0015
0.002
CM
Y
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface, pith only
0 60 120 180 240 300 360
azimuthal angle(degree)
-0.0004
-0.0003
-0.0002
-0.0001
0
0.0001
0.0002
CM
Z
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface, pitch only
0 60 120 180 240 300 360
azimuthal angle(degree)
-0.0005
0
0.0005
CM
X
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface, pitch only
0 60 120 180 240 300 360
azimuthal angle(degree)
0.001
0.002
0.003
0.004
0.005C
T
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4sliding interface, pitch only
Fig. 14 Comparisons of normalized rotor thrust (CT), pitching moment (CMX), roll moment (CMY), and torque (CMZ) coefficients of M427 rotor inforward flight.
0 60 360
azimuthal angle (degree)
0
200
400
600
800
1000
1200
num
ber
of b
ase
poin
ts
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4
0 60 120 180 240 300120 180 240 300 360azimuthal angle(degree)
0
5e-05
0.0001
0.00015
0.0002
0.00025
0.0003
0.00035
max
imum
sur
face
err
or
ALG 1, criterion=5e-5ALG 1, criterion=7.5e-5ALG 1, criterion=1e-4ALG 2, criterion=1e-4ALG 2, criterion=2.5e-4ALG 2, criterion=5e-4
Fig. 15 Comparisons of maximum surface errors (left) and base points (right) for M427 rotor.
Table 4 Computational costs for M427 rotor in forward flight
Case 1 2 3 4 5 6Option Algorithm 1 Algorithm 1 Algorithm 1 Algorithm 2 Algorithm 2 Algorithm 2Criterion 1.0e−4 7.5e−5 5.0e−5 5.0e−4 2.5e−4 1.0e−4
Maximum base points 382 495 592 714 800 1003Greedy algorithm time (A) 3179 5261 9637 120 210 512Mesh-deformation time (B) 1075 1300 1339 648 1534 1786CFD solution time (C) 7279 7279 7279 7279 7279 7279Cost ratio �A� B�∕Ca 58% 90% 151% 9% 21% 25%
aCost ratio: Algorithm 1 � �A� B�∕C; Algorithm 2 � B∕C.
718 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

trivial to parallelize the mesh update stage, and this is done here, andso this figure shows the costs for serial and 100 core mesh updateprocesses for demonstration. Hence, as expected, the mesh updatestage, which is linear in Nsel, outweighs the system solution until
Nsel ������������������������������������������Nvol∕nprocessors�
p, and this helps determine an optimum
number of selected surface points. For larger meshes with a largenumber of processors available, it would make sense to also run thesystem solution in parallel, and this is not difficult.Clearly, the greedy point-selection process is significantly more
expensive than the mesh-movement process. If this algorithm is usedonly once, before an unsteady calculation, the cost is not thatsignificant, but if it is called every time step then the system solutionand surface update should be performed in parallel for speed; this hasnot be done here but is straightforward to achieve.
VII. Conclusions
An efficient and robust mesh-deformation method has beenpresented in this paper for unstructured viscous mesh deformations,particularly for unsteady rotorcraft aeromechanical problems. Thesurface mesh deformation is simplified by using a beam modalrepresentation, while the volume mesh deformation is performedwith an efficient radial-basis-function-based method. Two greedyalgorithms are examined to vastly reduce the base points required tosolve the radial-basis-function system of equations, one using theexact instantaneous surface motion at each stage of an unsteadycalculation, the other using a constant displacement functionselecting surface points once before a calculation, and theiradvantages and disadvantages are discussed and demonstrated in thecurrent applications. It is shown that the real displacement errormethod can maintain the surface error at the specified level, but thenumber of base points will change accordingly. The constantdisplacement error method selects the base point before thecomputation, which is significantly more computationally efficient,although it results in more base points being selected to ensure thegeometric accuracy. The current mesh-deformation method isdemonstrated on several unsteady motions, including a sudden andlarge step translational and rotational motion for the NACA 0012rotor and a realistic Bell aircraft M427 main rotor in forward flight.The computational results indicate that the method is extremelyrobust, efficient, and accurate in handling large-scale unstructuredviscous meshes undergoing unsteady motions including structuraldeformations. Most significantly, it has been demonstrated that thereduced set of surface points may be selected before an unsteadycalculation, and so the greedy algorithm does not have to beimplemented at every time step. This means that the meshdeformation only adds around 25% extra CPU time to the CFD
solution cost, but this could be further reduced by running the systemsolution stage each time step in parallel.
Acknowledgments
This research was supported by Bell Helicopter IndependentResearch and Development (IR&D) funding under “Development ofAdvanced Computational Fluid Dynamic Tool for Advanced RotorBlade Designs,” with Jim Narramore as the Technical Point ofContact. This support is gratefully acknowledged. Thanks also go toKenneth Miller for providing support to the High PerformanceComputing (HPC) cluster computer facility located at the Universityof Toledo.
References
[1] Dubuc, L., Cantariti, F.,Woodgate,M., Gribben, B., Badcock, K. J., andRichards, B. E., “A Grid Deformation Technique for Unsteady FlowComputations,” International Journal of Numerical Methods in Fluids,Vol. 32, No. 3, 2000, pp. 285–311.doi:10.1002/(SICI)1097-0363(20000215)32:3<285::AID-FLD939>3.3.CO;2-3
[2] Spekreijse, S. P., Prananta, B. B., and Kok, J. C., “ASimple, Robust andFast Algorithm to Compute Deformations of Multi Block StructuredGrids,” National Aerospace Lab. TP 2002-105, 2002.
[3] Potsdam, M. A., and Guruswamy, G. P., “A Parallel Multiblock MeshMovement Scheme for Complex Aeroelastic Applications,” 39th AIAAAerospace Sciences Meeting, AIAA Paper 2001-0716, Jan. 2001.
[4] Batina, J. T., “Unsteady Euler Airfoil Solutions Using UnstructuredDynamicMeshes,” AIAA Journal, Vol. 28, No. 8, 1990, pp. 1381–1388.doi:10.2514/3.25229
[5] Farhat, C., Degand, C., Koobus, B., and Lesoinne, M., “TorsionalSprings for Two-Dimensional Dynamic Unstructured Fluid Meshes,”Computer Methods in Applied Mechanics and Engineering, Vol. 163,Nos. 1–4, 1998, pp. 231–245.doi:10.1016/S0045-7825(98)00016-4
[6] Biedron,R. T., andThomas, J. L., “Recent Enhancements to the FUN3DFlow Solver For Moving-Mesh Applications,” 47th AIAA Aerospace
Sciences Meeting, AIAA Paper 2009-1360, Jan. 2009.[7] Yang, Z., and Mavriplis, D. J., “Unstructured Dynamic Meshes with
Higher-Order Time Integration Schemes for the Unsteady Navier–StokesEquations,” 43rdAIAAAerospace SciencesMeeting andExhibit,AIAA Paper 2005-1222, Jan. 2005.
[8] Liu,X.,Qin,N., andXia,H., “FastDynamicGridDeformationBasedonDelaunay Graph Mapping,” Journal of Computational Physics,Vol. 211, No. 2, 2006, pp. 405–423.doi:10.1016/j.jcp.2005.05.025
[9] Allen, C. B., “Parallel Universal Approach to Mesh Motion andApplication to Rotors in Forward Flight,” International Journal for
Numerical Methods in Engineering, Vol. 69, No. 10, 2007, pp. 2126–2149.doi:10.1002/(ISSN)1097-0207
Fig. 16 Cost scaling for point-selection algorithm (left) and mesh-update algorithm (right), both in terms of number of selected surface points.
SHENG AND ALLEN 719
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26

[10] Rendall, T. C. S., and Allen, C. B., “Unified Fluid-StructureInterpolation and Mesh Motion Using Radial Basis Functions,”International Journal for Numerical Methods in Engineering, Vol. 74,No. 10, 2008, pp. 1519–1559.doi:10.1002/(ISSN)1097-0207
[11] Rendall, T. C. S., and Allen, C. B., “Reduced Surface Point SelectionOptions for EfficientMeshDeformationUsingRadial Basis Functions,”Journal of Computational Physics, Vol. 229, No. 8, 2010, pp. 2810–2820.doi:10.1016/j.jcp.2009.12.006
[12] Rendall, T. C. S., and Allen, C. B., “Parallel Efficient Mesh MotionUsing Radial Basis Functions with Application on Multi-BladedRotors,” International Journal for Numerical Methods in Engineering,Vol. 81, No. 1, 2010, pp. 89–105.doi:10.1002/nme.2678
[13] de Boer, A., van der Schoot, M. S., and Bijl, H., “Mesh DeformationBased on Radial Basis Function Interpolation,” Computers and
Structures, Vol. 85, Nos. 11–14, 2007, pp. 784–795.doi:10.1016/j.compstruc.2007.01.013
[14] Sheng, C., “A Preconditioned Method for Rotating Flows at ArbitraryMach Number,” Modeling and Simulation in Engineering, Vol. 2011,2011, pp. 1–17.doi:10.1155/2011/537464
[15] Spalart, P., and Allmaras, S., “A One-Equation Turbulence Model forAerodynamic Flow,” 30th Aerospace Sciences Meeting and Exhibit,AIAA Paper 1992–0439, Jan. 1991.
[16] Bauchau, O., Bottasso, C., and Nikishkov, Y., “Modeling RotorcraftDynamics with Finite Element Multibody Procedures,” Mathematical
and Computer Modeling, Vol. 33, Nos. 10–11, 2001, pp. 1113–1137.doi:10.1016/S0895-7177(00)00303-4
[17] Rajmohan, N., “Application of Hybrid Methodology to Rotor in Steadyand Maneuvering Flight,” Ph.D. Dissertation, Georgia Inst. ofTechnology, Atlanta, Oct. 2010.
[18] Pouderoux, J., Tobor, I., Gonzato, J., and Guitton, P., “AdaptiveHierarchical RBF Interpolation for Creating Smooth Digital ElevationModels,” Proceedings of the `12th ACM International Symposium on
Advances in Geographical Information Systems, Association forComputing Machinery, New York, NY, USA, 2004, pp. 232–240.
[19] Barba, L. A., and Rossi, L. F., “Global Field Interpolation for ParticleMethods,” Journal of Computational Physics, Vol. 229, No. 4, 2009,pp. 1292–1310.doi:10.1016/j.jcp.2009.10.031
[20] Wendland,H., “Piecewise Polynomial, PositiveDefinite andCompactlySupported Radial Functions of Minimal Degree,” Advances in
Computational Mathematics, Vol. 4, No. 1, 1995, pp. 389–396.doi:10.1007/BF02123482
[21] Fasshauer, G., “Meshfree Approximation Methods with MATLAB,”Interdisciplinary Mathematical Sciences, World Scientific Publ.,Singapore, 2007, pp. 85–92.
[22] Caradonna, F. X., and Tung, C., “Experimental and Analytical Studiesof a Model Helicopter Rotor in Hover,” Vertica, Vol. 5, No. 2, 1981,pp. 149–161.
[23] Leishman, J. G., Principles of Helicopter Aerodynamics, 2nd ed.,Cambridge Univ. Press, New York, NY, 2006, pp. 171–211.
[24] Morillo, J. A., Summers, M., and Bridgeman, J. O., “Implementation ofDYMORE (CSD)/ OVERFLOW-2 (CFD) Loose Coupling Methodol-ogy at BHTI,” American Helicopter Society 66th Annual Forum, TheAmerican Helicopter Society, Alexandria, VA, May 2010.
[25] Sheng, C., Zhao, Q., Rajmohan, N., Sankar, L., Bridgeman, J., andNarramore, J., “AnUnstructured Hybrid CFDApproach for ComputingRotor Wake Flows,” 49th AIAA Aerospace Sciences Meeting, AIAAPaper 2011-1124, Jan. 2011.
W. K. AndersonAssociate Editor
720 SHENG AND ALLEN
Dow
nloa
ded
by G
EO
RG
E W
ASH
ING
TO
N U
NIV
on
Apr
il 2,
201
3 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.J
0521
26