Embed Size (px)
Citation preview

Effect of skew, pole count and slot count on brushless motor radial force, cogging torque and back EMF
D.C. Hanselman
Indexing terms: Brushless motors, Permanent magnet motors, Cogging torque
Abstract: Permanent magnet brushless motors are increasingly being used in high performance applications. In many of these applications the acoustic noise and torque ripple characteristics of the motor are of primary concern. Because of this concern, it is important to understand the influence of the motor geometrical parameters of skew amount, pole count and slot count on the resulting motor characteristics of radial force, cogging torque and back EMF. While these relationships are understood intuitively and have been explored experimentally and predicted numerically, they have not been confirmed analytically for motors having any combination of skew amount, pole count and slot count. The paper fills this void by exploring these relationships analytically using a Fourier series. The influence of skew amount, pole count and slot count on motor radial force, cogging torque and back EMF are shown to confirm prior experimental and numerical results. More importantly, the derived analytical results provide valuable insight into the implications of common motor design choices.
List of principal symbols
R(.) = radial force T(.) = cogging torque @(.) = magnetic flux E(.) = back EMF N, = number of magnet poles on the rotor surface N, = number of slots 8 = mechanical position, e.g. 8 = 0 to 8 = 2 x is one
shaft revolution w = d8/dt, mechanical angular velocity 0, = 2x/Nm1 angular pole pitch 6, = 2x/N,., angular slot pitch a = normalised skew amount, e.g. a = 1 is a one-
slot pitch skew 0 IEE, 1997 IEE Proceedings online no. 19971205 Paper first received 27th August 1996 and in revised form 13th February 1997 The author is at 5708 Barrows Hall, University of Maine, Orono, ME 04469-5708, USA
L, = motor stack length Nt = number of turns per coil.
1 Introduction
Permanent magnet brushless motors are increasingly being used in high performance applications. In many of these applications the acoustic noise and torque rip- ple characteristics of the motor are of primary concern. As a result, a great deal of study has been devoted to identifying the sources, characteristics and minimisa- tion of acoustic noise [l-61 and torque ripple[7-181 While these works provide extremely valuable insight, none of them identifies the underlying fundamental influence of skew amount, pole count and slot count on the forces that create acoustic noise and torque rip- ple. For example, in [l-31 finite element analysis is used to study the influence of rotor geometry and magnet properties that lead to minimal stator force variations. In [4-61 stator structural resonances and modal shapes are studied to determine how rotor-stator force distri- butions create vibration in the stator.
Cogging torque and mutual torque ripple constitute the two primary sources of torque ripple. Of these, cog- ging torque is created by stator slots interacting with the rotor magnetic field, while mutual torque ripple is created by a mismatch between excitation current and the shape of the motor back EMF. Therefore, minimis- ing torque ripple requires that the cogging torque and motor back EMF be studied. Based on this under- standing, torque ripple has been studied from a variety of viewpoints. For example, the use of stator excitation currents to cancel cogging torque is discussed in [7, 81. Using predicted magnetic field distributions work in [9- 1 I ] shows the influence of geometric dimensions such as magnet width and slot opening on cogging torque production. In addition, techniques are developed in [ 12-14] to predict cogging torque based on descriptions of the motor magnetic field distribution.
Rather than repeat the analyses illustrated by these and other references, this work starts with the assump- tion that the radial and tangential forces acting on the stator repeat from tooth to tooth as demonstrated in [2]. Then, using a Fourier series description of per- tooth quantities, the net radial force, cogging torque and back EMF of a complete motor are found by superimposing the contributb,ns from all teeth. By fol- lowing this unique approach, the key influences of skew amount, pole count and slot count on net radial force, cogging torque and back EMF are identified and analysed. Moreover, an approximation of the magnetic
325 IEE Proc-Electr. Power Appl., Vol. 144, No. 5. September 1997

field distribution in the motor is not required because this work identifies and analyses the invariant relation- ships that are not a function of any particular magnetic field distribution. For example, [13-161 state or show that a one-slot pitch skew eliminates cogging torque no matter what the field distribution is.
The goal of this paper is to provide an analytical basis for facts and observations that have been shown experimentally in the past but have not been described analytically in a rigorous fashion. Examples include: (a) that a one-slot pitch skew eliminates cogging torque [13-161; (6) that the rotor can experience a net radial force if the number of slots is odd [17]; and (e) that skewing decreases the harmonic content of the back EMF [7].
After making assumptions in the following Section, the influence of skew on per-tooth quantities is identi- fied. Then the net radial force, cogging torque and back EMF are in turn found and analysed. Finally, conclusions are drawn.
2 Fundamental assumptions and concepts
To facilitate the analysis conducted here, the following assumptions are made:
The motor is constructed with an airgap where flux flows radially from the rotor to the stator. * The rotor surface and inside stator bore are circular and concentrically centred. * Stator slots and teeth are uniformly shaped and uni- formly distributed about the inside stator bore.
Rotor magnetic poles are uniformly shaped and dis- tributed around the circumference of the rotor and each provides an identical magnetic field distribution. * End effects are negligible and the magnetic field dis- tribution due to the rotor magnets contains no axial component. * Skewing varies linearly along the axial dimension of the motor. * The stator teeth are rigid. Radial and tangential forces experienced by the teeth cause negligible defor- mation and no change in the magnetic field distribution within the motor.
There is no stator current excitation. No assumption about rotor construction is made here. The rotor may have surface mounted magnets of any common shape, or it may have buried magnets. This work starts with the assumption that the radial force, cogging torque and flux associated with a radial cross- section of a single tooth can be written in terms of a Fourier series. The analysis conducted here deals with Fourier series in a general sense. As a result, computed Fourier series coefficients based on computed magnetic field distributions are not required, but could be used if the characteristics of a specific motor geometry are desired.
Consider the unskewed rotor-stator structure shown in Fig. 1. In the Figure, y signifies the displacement between the centre of a tooth and the centre of a mag- net face. Using the Figure it is easily shown that the radial force on a stator tooth is periodic with period y = 2n or one pole pitch Om = 2nlN, in the mechanical position, where N, is the number of magnet poles fac- ing the airgap around the rotor. At point (i) in the Fig- ure, the stator tooth is centred over a rotor magnet in
326
the aligned position where maximum radial force is exerted on the tooth. At point (ii), the unaligned posi- tion, minimum radial force is exerted. Similar to point (i), point (iii) once again exhibits maximum radial force, although the direction of flux flow is opposite that at point (i). Based on this insight, the radial force on a single tooth is an even function of y and can be written as the Fourier series
00
R(r ) = C R n c o s ( n r ) (1) n=O
I1 I (I1 1 (Ill)
radial
- tangentiai Fig. 1 Simple rotor-stator sketch (i) y = 0 (ii) y = n (iii) y = 2 ~ c
Referring again to Fig. 1, the cogging torque experi- enced by the tooth is also periodic with period y = 2n. At points (i) and (iii) the cogging torque is zero because the tooth is aligned with magnetic poles on the rotor. Zero cogging also appears at point (ii) since the tooth is balanced at the unaligned position. Between points (i) and (ii) cogging is negative since the tooth will try to return to point (i). Similarly, between points (ii) and (iii) cogging is positive since the tooth will try to move to point (iii). Based on this description, the cogging torque on a single tooth is an odd function of y and can be written as the Fourier series
00
n= I
Referring to Fig. 1 yet again, the flux passing through a single tooth is periodic with period y = 4x, or two pole pitches 0 = 28, At point (i) the flux is maximum in the upward direction. At point (iii) the flux is maxi- mum in a downward direction, and at point (ii) the flux is zero. Given this description, the tooth flux can be written as
( 3 ) n=l
In summary, the radial force, cogging torque and flux of a single stator tooth can all be written in terms of Fourier series. In the following Section these results will be extended to the skewed case.
3 The effect of skew
Eqns. 1-3 describe an unskewed motor. In the skewed case these equations must be modified to take into account the linearly varying phase shift as a function of axial distance. To illustrate this, let eqns. 1-3 be described by the general Fourier series
00
A, cos(n$) + Bn sin(n$) (4) n=O
IEE Proc -Electr Power A p p l , Vol 144 No 5, September 1997

Then divide eqn. 4 by the stack length L,$, to normalise it per unit axial length and let it describe a radial cross- section of the motor at its axial midpoint where z = 0. As a result z = *L,/2 are the axial ends of the motor. Using these ideas, eqn. 4 becomes
At other points along the axial length of the motor, the radial force, cogging torque and flux have the same shape as eqn. 5 , but are shifted in phase by the amount of skew at any given point Assuming that the total skew is a, in q co-ordinates, eqn. 5 can be rewritten for any point z as
The total force, torque or flux on a single tooth is given by the integration of this expression along the axial motor length,
F ( $ ) = J.Ls’z f ( d I , x ) d z - L , / 2
n = O
where sinc(x) = sin(x)lx. This expression is remarkably simple. It shows that skewing amplitude modulates the original Fourier series (eqn. 4) by a sinc function. In other words, the original Fourier series is lowpass fil- tered by a sinc function frequency response. This fact appears in [15, 161, but was never identified as being significant. As shown later, the sinc function plays a key role in this analysis.
Using eqn. 7, eqns. 1-3 can be rewritten to include skew and in terms of mechanical position 6’ as
00
(9) n=O
w
+(e) = +ns,,2 cos(nN,O/2) (10) n= 1
where
S, = sinc(nNmaOS/2) (11) in which 6’: = 2 d N , is the angular slot pitch, N, is the number of slots and a is the normalised skew, e.g. a = 1 is a one-slot pitch skew over the axial motor length.
Before considering eqns. 8-10, it is convenient to identify the zeros of eqn. 11, as any harmonics that fall on the zeros are eliminated. For the above, these zeros occur at
nN,a g -- NS
when 4 is an integer
4 Radial force
Consider the motor cross-section shown in Fig. 2.
IEE Proc -Electr. Power Appl., Vol. 144, No. 5. September 1997
Eqn. 8 describes the radial force between the tooth labelled 0 and the rotor. The net radial force on the rotor is the vector sum of that between all teeth and the rotor. Because of the assumed symmetry, the radial force between the kth tooth and the rotor has the same shape as that of tooth 0, but is offset in phase by its spatial distance from tooth 0. That is, the radial force between the kth tooth and the rotor can be written as
M
n=O
k = 0,1, * . . , N , - 1
hg.2 4-pole, 12-slot motor cross section
where 6, = 2dN, is the angular slot pitch. Eqn. 13 gives the magnitude of the radial force. The corresponding angle is simply k0,. Knowing the magnitude and angle of all radial force components, the net radial force on the rotor in the x-direction is given by the vector sum
N, -1
k=O 00
= R,S,X, cos(nN,O) (14) n = O
where N,-I
X , = co~(nN,kO,) cos(kO,) (15) k O
In a similar manner the y-direction net radial force is N, -1
k 0 00
= R,S,Y, sin(nNm8) (16) n = O
where N, -1
Y, = sin(nNmkO,) sin(k0,) (17) lC=O
From eqns. 14 and 16 it is clear that the net radial force components are closely related to the radial force per tooth Fourier series (eqn. 8). Summing over all
321

teeth adds another amplitude modulation term, eqns. 15 and 17, respectively, for the x- and y-directions.
Using eqns, 14 and 16 along with eqns. 11, 12, 15 and 17, it is possible to determine the conditions under which the net radial force on the rotor is zero. R, rep- resents the Fourier series coefficients describing the attraction between a single tooth and the rotor. Assum- ing that these coefficients are predetermined, the net
ce is zero if S, is zero for all n 2 1, if X, and Y, are zero for all values of n, or if the products X,S, and Y,S, are zer all n> 2 1. Using eqn. 12, the first of these con s does not occur in a practical motor since it would require that N, alN, be an inte- ger, For example, to satisfy this constraint in a motor having a one-slot skew the number of magnet poles N, must be some of the number of slots N,. Therefore, the on1 provided by skewing alone is the inherent attenuation provided by the sinc function frequency response.
Of the two other possible constraints, it is possible for X , and Y, to be zero for all n. These two expres- sions are zero whenever there is symmetry between the
net poles and the stator teeth. Stated mathe- there is zero net radial force on the rotor
gcd(fl?n,Ns) > 1 (18) where gcd(.;) is the greatest common divisor of its arguments. In particul hen gcd(NmtN,) = p and p > 1, there is periodicity repeats every 360lp degre s around the rotor peri For example, in the 4-po e, 12-slot topology illustrated in Fig. 2, gcd(4, 12) = 4,
that there is periodicity every 36014 = 90
et poles is always even, whenever the number of
slots is even, as eqn. 18 is always satisfied in this case. On the other hand, when the number of slots is odd, the rotor experiences a net radial force whenever eqn. 18 is violated. For example, in a d-poie, 15-slot
15) = 1 and a net radial force appears. hand, in a 6-pole, 21-slot motor, gcd(6,
In those cases where a net radial force appears, it is
to the force since these indices indicate the relative speed at which the net radial force rotates with the rotor. Moreover, because the harmonic amplitudes of
s frequency increases and lowpass filtering, higher
fer amplitude forces. The
1"
21) = 3 and zero net radial force appears.
cia1 to know the har ic indices that con
00th functions
indices correspond harmonics that contribute to net radial force satisfy
o not exist for all vahes they equally spaced. For example, in a +pole, 15-slot
11, 19, 26, ... >, alternates between 7 and motor, the harmonics that 23, 43, 56, 76, indices alternates examples, the first CO harmonic is equal to N,. However, this is s true. For an 8-pole, 27-slot motor, the harm at satisfy eqn. 19 are y1 E (10, 17, 37, 44, ).._ $, where the first contributing
328
harmonic is equal to 10, not 8. As a final point, it is true in general that the sum of the two numbers describing the alternating differences between indices equals the number of slots, i.e. 7 + 8 = 15, 13 + 20 = 33 and 7 + 20 = 27, respectively, for the examples cited above.
For convenience, let q+ and q- be the sets of all n that satisfy eqn. 19 with a plus and minus sign, respec- tively. Similarly, let q be the set of all n that satisfy eqn. 19. Evaluating eqns. 15 and 17 at the points in q gives the amplitude modulation factors
(20 )
X , = Ns/2 for n E T,I (21)
yn = { Ns/2 for n E r- -Ns /2 for n E r+
and
These expressions show that when a net radial force harmonic appears, one-half of the teeth effectively con- tribute their per-tooth force harmonic to the amplitude of the net radial force harmonic in eqns. 14 and 16.
5 Cogging torque
Consider the motor cross-section shown in Fig. 2 again. Eqn. 9 describes the cogging torque experienced by the tooth labelled 0. As before, the cogging torque experienced by the kth tooth is
00
~ ~ ( 0 ) =
k = 0,1, . . . , Ns - 1
T,S, sin[nN,(Q - M,)] n=O
(22) The net cogging torque is the algebraic sum over all teeth,
N,-l 00
T,,~(o) = T ~ ( o ) = C ~ , ~ , ~ , s i n ( n i \ ; , ~ ) k=O n = O
( 2 3 ) where
N, -1
k=O
Using eqns. 23 and 24 along with eqns. 11 and 12, it is possible to investigate how the cogging torque of individual teeth contributes to the net cogging torque experienced by the rotor. Because net cogging torque is an algebraic sum, the per-tooth harmonics that appear in the net cogging torque satisfy the simple relationship
Moreover, once the lowest n that satisfies eqn. 25 is found, the remainder are simply multiples of it; all other harmonics are zero. For example, in the 4-pole, 12-slot case shown in Fig. 2, n E (3, 6, 9, ... >. For this case, the first contributing harmonic at n = 3 corresponds to a frequency at nNm/2 = 6 times the fundamental electrical frequency, which agrees with intuition since there are six slots per electrical period. In the 6-p0le, 21-slot motor that was shown earlier to have zero net radial force, the harmonic indices that create net cogging torque are n E (7, 14, 21, ... }, while the cogging torque harmonic indices for the 4-pole, 15- slot motor that exhibits net radial force are n E { 15, 30,
Motors having an integral slot pitch, i.e. NJN, = p , where p is an integer, have a first cogging torque
gcd(n",Ns) = Ns (25)
45, ...}.
IEE Proc -Electr Power Appl, Vol 144 No 5 September 1997

harmonic index of p, which is the worst case (e.g. for N , = 4, N, = 12, p = 3). C)n the other hand, motors having a fractional slot pitch, where N, and N, share no common factor, have a first cogging torque harmonic index of IVY, which is the best case (e.g. for N , = 4, N, = 15, p = 15). When N, and N, share a common factor, i.e. when gcd(N,,N,) = p and p > 1, there is periodicity that repeats every 360/p degrees around the airgap and the first cogging torque harmonic index appears at N,/p, which lies between the best and worst cases (e.g. for N, = 6, N,, = 21, p = 3). For this reason, 3-phase motors having 64 magnet poles, e.g. 6, 12, 18, ... magnet poles, tend to have more significant cogging torques than motors with other magnet pole counts.
A comparison of eqn. 18 with eqn. 25 shows that, if N, and N, share a common factor p > 1, the motor exhibits zero net radial force but has a first cogging torque harmonic index of NJp. However, if N, and N, do not share a common factor, the motor exhibits nonzero net radial force but has a first cogging torque harmonic index of N,. Thus, a motor having zero net radial force inherently exhibits cogging torque at a lower frequency than one exhibiting nonzero net radial force. There simply is no way to juggle the pole and slot counts to eliminate net radial force and minimise the cogging torque. These facts have been demon- strated numerically in [17].
A comparison of eqn. 12 with eqn. 25 shows how skew influences net cogging torque. For example, when there is a one-slot skew the zeros of the sinc function, eqn. 12, become those integers 4 satisfying
When eqn. 25 is satisfied, eqn. 26 is also. Thus, the net cogging torque harmonics that exist according to eqn. 25 appear at the zeros of the sinc function, and all cogging torque harmonics are cancelled, thereby confirming the fact that cogging torque is ideally eliminated by a one-slot pitch skew.
Based on the above reasoning, it can be shown that a skew of llp of a slot pitch, where p is an integer, cancels the pth net cogging torque harmonic and every pth one thereafter that exists by eqn. 25. So, for example, if the 4-pole, 12-slot case shown in Fig. 2 having cogging torque harmonic indices of n E (3, 6, 9, ... } is skewed by 1/2 slot pitch, the harmonics at (6, 12, ... } are cancelled by the skew, but those at (3, 9, ...} remain with the third harmonic attenuated by sinc(d2) = 2/z = 0.64. Thus the only way to eliminate the first and usually largest contributing harmonic to the cogging torque is by using a one-slot pitch skew.
Finally, for those indices where eqn. 25 is satisfied, the amplitude modulation factor @( 0) becomes
which implies that when a per-tooth cogging torque harmonic contributes to a net cogging torque harmonic, all N, teeth contribute equally.
6 BackEMF
@ ( e ) = N, (27)
Back EMF is generated by the rate of change c f flux linkage in a coil with respect to time. In the simplest case, a coil of Nt turns appears around one tooth. For example, consider a coil around tooth 0 in Fig. 2 where the turns travel into slot 0 and out of slot 1. The back
EMF generated by this coil is
where Q(B) is given in eqn. 10 and w = dO/dt. The back EMF generated by coils around other teeth are expressed similarly given the flux in the kth tooth
n=l
k = 0,1, ..., Ns - 1 (29 1 Substituting eqn. 29 into eqn. 28 gives the back EMF generated by a coil around the kth tooth
k = 0,1, . . . , N, - 1 (30) Since any general coil can be decomposed into a sequence of single-tooth coils [18], eqn. 30 can be used to find the back EMF of any coil by summing over the teeth enclosed by the coil, i.e.
k € K
- n=l
(31) where K is the set of teeth enclosed by the coil. The influence of skew is readily apparent in this expresdion. S,, = sinc(nN, ~ 0 4 4 ) lowpass filters the back EMF; no matter how the coil is wound. Thus, there is no way to eliminate the impact of skew on the back EMF by choosing a particular winding arrangement.
The zeros of Snn appear at
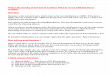
Fig. 3 Trapezoidal buck EMF against skew amount
when q is an integer. Therefore, for the motor shown in Fig. 2, with N, = 4, N, = 12 and an a = 1 slot pitch skew, all multiples of the 6th harmonic are cancelled. When there is an a = 1/2 slot pitch skew, all multiples of the 12th harmonic are cancelled. To further illustrate the impact of skew, consider the motor shown in Fig. 2 with a full pitch coil of Nt turns going into slot 0 and out of slot 3. Using the assumption that the back EMF of this coil is trapezoidal without skew, Fig. 3 shows the back EMF filtering provided by skew amounts of 0, 1/2, 1 and 2 slot pitches. Clearly the
329 IEE Pro?.-Electr. Power Appl , Vol. 144, No 5, September 1997

skew smoothes the corners of the trapezoid, leading to mutual torque ripple when driven by conventional rectangular pulse currents.
Finally, let the bandwidth of the sinc function be defined by its first zero, i.e. when q = 1 in eqn. 32. Then the first harmonic to appear at or beyond the bandwidth is
( 3 3 ) 2Ns “a
n=-
To minimise the back EMF filtering provided by the sinc function, n in eqn. 33 should be as large as possible. Clearly this can be accomplished by minimising the skew amount a, or by increasing the number of slots relative to the number of magnet poles NJN,. This last relationship promotes motor construction having multiple slots per pole per phase.
7 concsusions
The above analysis has shown the fundamental influence of skew amount, pole count and slot count on radial force, cogging torque and back EMF. While these relationships have been known qualitatively in the past, this work provides an analytical foundation for them that in turn allows further insight to be gained. The analysis was conducted assuming that the motor was mechanically and magnetically symmetric. As a result, a real motor will have net radial force, cogging torque and back EMF harmonics not predicted above. However, their amplitude will be small relative to those predicted above if the motor is constructed with the precision common to high performance motor manufacturing. The predicted harmonic content of the net radial force was shown to have a noninteger harmonic relationship to the per- tooth harmonics, whereas the harmonic content of the cogging torque has a simple harmonic relationship to its per-tooth harmonics. Furthermore, it was shown that having an odd slot count reduces cogging torque by increasing the frequency at which they appear, but often leads to the appearance of net radial force. While the analysis conducted here was not based on the predicted magnetic field distribution in a motor, such data could certainly be used. In fact, since the analysis presented here relies only on the magnetic field of a single unskewed tooth, only a small fraction of a motor cross-section need be modelled. Moreover, only two dimensional modelling is needed since the three dimensional effects of skew are taken into account in
the analysis. These two features significantly simplify the process of collecting data to be analysed.
8
1
2
3
4
5
6
7
8
9
References
RAHMAN, B.S., and LIEU, D.K.: ‘The origin of permanent magnet induced vibration in electric machines’, Trans. ASME, J. Vib. Acoust., 1991, 113, pp. 476481 LEFEVRE, Y., DAVAT, B., and LAJOIE-MAZENC, M.: ‘Determination of synchronous motor vibrations due to electro- magnetic force harmonics’, IEEE Trans., 1989, MAG-25, (4), pp. 2974-2976 JANG, G.H., and LIEU, D.K.: ‘Vibration reduction in electric machines by interlocking of the magnets’, IEEE Trans., 1993,
BENBOUZID, M.E.H., REYNE, G., DEROU, S., and FOG- GIA, A.: ‘Finite element modeling of a synchronous machine: electromagnetic forces and mode shapes’, IEEE Trans., 1993,
VERDYCK, D., and BELMANS, R.J.M.: ‘An acoustic model for a permanent magnet machine: modal shapes and magnetic forces’, IEEE Trans., 1994, LA-30, (6) , pp. 1625-1631 CHANG, S.C., and YACAMINI, R.: ‘Experimental study of the vibrational behavior of machine stators’, IEE Proc. B, 1996, 143, ( 3 ) , pp. 242-250 JAHNS, T.M., and SOONG, W.L.: ‘Pulsating torque minimiza- tion techniques for permanent magnet AC motor drives ~ a review’, IEEE Trans., 1996, IE-43, (2), pp. 321-330 HANSELMAN, D.C.: ‘Minimum torque ripple, maximum effi- ciency excitation of brushless permanent magnet motors’, IEEE Trans., 1994, IE-41, (3), pp. 292-300 ACKERMANN, B., JANSSEN, J.H.H., SOTTEK, R., and VAN STEEN, R.I.: ‘New technique for reducing cogging torque in a class of brushless DC motors’, IEE Proc. B, 1992, 139, (4), KID. 3 15-320
MAG-29, (2), pp. 1423-1426
MAG-29, (2), pp. 20162018
10 YI, T., and SLEMON, G.: ‘Reduction of cogging torque in per- manent magnet motors’, IEEE Trans., 1988, MAG-24, (6), pp. 2901-2903
11 ISHIKAWA, T., and SLEMON, G.: ‘A method of reducing rip- ple torque in permanent magnet motors without skewing’, IEEE Trans., 1993, MAG-29, (2), pp. 2028-2031
12 ZHU, Z.Q., and HOWE, D.: ‘Analytical prediction of cogging torque in radial-field permanent magnet brushless motors’, IEEE Trans., 1992, MAG-28, (2), pp. 1371-1374
13 DE LA REE, I., and BOULES, N.: ‘Torque production in per- manent-magnet synchronous motors’, IEEE Trans., 1989, IA-25, (l), pp. 107-112
14 DEODHAR, R.P., STATON, D.A., JAHNS, T.M., and MILL- ER, T.J.E.: ‘Prediction of cogging torque using the flux-MMF diagram technique’, IEEE Trans., 1996, IA-32, (3) , pp. 569-575
15 KIM, K.H.,, SIM, D.J., and WON, J.S.: ‘Analysis of skew effects on cogging torque and BEMF for BLDCM’. IEEE IAS Conf. Rec., Dearborn, MI, Sept. 1991, pp. 191-197
16 PRINA, S.R., and TAFT, C.K.: ‘The design of brushless DC motors having smooth rotor back iron’. Incremental motion con- trol systems and devices Symposium, IMCSD 90, San Jose, CA, June 1990, pp. 75-100
17 WILLIAMS, M.M., ZARIPHOPOULOS, G., and MACLEOD, D.J.: ‘Performance characteristics of brushless motor slot/pole configurations’. Incremental motion control sys- tems and devices Symposium, IMCSD 94, San Jose, CA, June 1994, pp. 145-153
18 MILLER, T.J.E., and RABINOVICI, R.: ‘Back-EMF waveforms and core losses in brushless DC motors’, IEE Proc. Electv. Power AppL, 1994, 141, (3), pp. 144-154
330 IEE Proc-Electr. Power Appl., Vol. 144, No. 5, September 1997