Embed Size (px)
Citation preview

Efficient Distributed State Estimation ofHidden Markov Models over Unreliable Networks
Amirhossein Tamjidi1, Reza Oftadeh2, Suman Chakravorty1, Dylan Shell2
Abstract—This paper presents a new recursive Hybridconsensus filter for distributed state estimation on a HiddenMarkov Model (HMM), which is well-suited to multi-robotapplications and settings. The proposed algorithm is scal-able, robust to network failure and capable of handling non-Gaussian transition and observation models and, therefore,it is general. No global knowledge of the communicationnetwork is assumed. Iterative Conservative Fusion (ICF) isused to reach consensus over potentially correlated priors,while consensus over likelihoods is handled using weightsbased on a Metropolis Hastings Markov Chain (MHMC).The proposed method is evaluated in a multi-agent trackingproblem and a high dimensional HMM and it is shown thatits performance surpasses the competing algorithms.
I. INTRODUCTION
Estimation within robotic-sensor networks has manyapplications and, thus, has been extensively studied inrecent years [1], [2], [3]. In a mobile sensor network,robots carry sensors that make noisy observations of thestate of an underlying system of interest. The estimationis considered centralized if all the nodes send their rawobservations to a central node who then calculates anestimate based on the collective information [4]. Thisis not always possible owing to link failures as wellas bandwidth and energy constraints [5]. One viablealternative is Distributed State Estimation (DSE).
In DSE, the processor on each node (or robot) fuseslocal information with the incoming information fromneighbors and redistributes the fused result on thenetwork. The objective is to design both a protocolfor message passing between nodes and local fusionrules so that the nodes reach a consensus over theircollective information. Although the DSE algorithms arenot guaranteed to match the performance of the central-ized estimator all the time, their scalability, modularityand, robustness to network failure motivates the ongoingresearch. These features are important for the envisionedrobotic applications of such algorithms, such as multi-agent localization [6] and cooperative target tracking [7].
DSE algorithms can be categorized on the basis ofassumptions they make. Any DSE method makes assump-tions about one or more of the following aspects: the state(static [8] or dynamic [6]), state transition model (linear[9] or non-linear [10], [11], [12], [13]), type of noise
1Department of Aerospace Engineering, Texas A&M University2Department of Computer Science & Engineering, Texas A&M UniversityCorresponding author email: [email protected]
(Gaussian [8], [9] or non-Gaussian [14]), topology of thenetwork (constant or changing [15], [8]), connectivityof the network (always [10] or intermittent connection[15], [8]), agents’ knowledge about the network topology(global or local [15], [8], [10]) and finally the treatment ofmutual information between local estimate (exact solutionthrough bookkeeping [1] or conservative solutions thatavoid double counting [16], [17]).
The research on DSE for linear systems with Gaussiannoise is extensive (see [9], [18] for reviews). For nonlinearsystems with Gausssian noise, the distributed versions ofExtended Kalman Filters (EKF), Extended InformationFilters (EIF) and Unscented Kalman Filter (UKF) havebeen proposed [19], [20], [10], respectively. For nonlinearsystems with non-Gaussian noise, different flavors ofDistributed Particle Filter (DPF) methods were proposedby Mao and Yang [21].
For dynamic state systems within time-varying net-works, the connectivity constraint is a determining factorfor choosing the proper DSE method. If the networkremains connected, DSE methods can maintain equalityof each node’s priors and then perform consensus onlikelihoods only [22], [23]. We refer to this approach asConsensus on Likelihoods (CL). The advantage of CL isthat given enough time to reach consensus, it can matchthe centralized estimator’s performance. However, if thenetwork becomes disconnected, priors become differentand CL methods fail. In such scenarios, the prevailingapproach is to perform Iterative Conservative Fusion (ICF)on node posteriors [24], [16], [17]. ICF methods have aconservative fusion rule that avoids double counting at theexpense of down weighting the uncorrelated information.Consequently, they are inherently sub-optimal.
Researchers recently began combining ICF and CLmethods to benefit from their complementary features[19], [10], [15]: CL can reach consensus over uncorrelatednew information, while ICF can handle correlated priorinformation. In this paper we extend our previous method[15] to general finite-state systems with non-Gaussiannoise. We propose a Hybrid method that is a synergisticcombination of AT: CL and ICF. The contributions ofthe paper are:• The new Hybrid method shows unmistakable supe-
riority over ICF in applications with large numberof agents and time-varying networks that faceintermittent disconnection.

• The method handles non-Gaussian noise modelswhich is particularly useful for collaborative trackingand localization applications.
Hidden Markov Models (HMMs) are adopted as thegeneral means for describing the system whose state isbeing estimated. In Section II, the notation used in thispaper is explained as well as assumptions, along with thesystem model. Section III discusses some preliminarieson distributed state estimation, paving the way for the newmethod. Our proposed method is presented in Section IVand finally, we evaluate its performance in Section V.
II. NOTATION AND MODELING
The Network Topology: Assume that we have nhomogeneous agents associated with the nodes of a graph.These agents can communicate with each other under atime-varying undirected network topology Gk = 〈V, Ek〉where V and Ek are the set of graph nodes and edgesat step k respectively. The node corresponding to theith agent is denoted by vi. If (vi, vj) ∈ Ek, it meansthat agents i and j can communicate directly at stepk. The set N i represent neighbors of node vi that areconnected by an edge to vi. The set Ni = N i ∪ {vi}will also be used in some of the equations. The set CCikrepresents the set of agents that are path-connected toagent i at step k. For an arbitrary set with s ∈ N membersb = {bi1 , · · · , bis}, the index set Ib = {i1, · · · , is} con-tains the indices of b’s members. We use the abbreviatedform In = {1, 2, · · · , n}, and Ik = {1, 2, · · · , k} toindex the agents and time steps, respectively.
The Model: Consider a finite state HMM with thefollowing specification:• The HMM has ns possible states X ={S1, · · · , Sns
} and also, there are nz possibleobservation symbols Z = {O1, · · · , Onz
}.• The random variables Xk ∈ X and Zik ∈ Z
represent the state and observation made by agenti at step k, respectively. The realizations of thoserandom variables at step k are denoted as xk andzik.
• The transition model is a ns × ns matrix denotedas Pk|k−1 , p(Xk|Xk−1). All the agents possessthis model.
• AT: Each agent has an observation model, which isa ns×nz matrix denoted as p(Zik|Xk), i ∈ In. Theobservation models of different agents can differ.
• The prior, prediction, and posterior probabilities are1× ns random vectors
πk−1 , p(Xk−1|{zik}
i∈In
k∈Ik−1
),
πk , p(Xk|{zik}
i∈In
k∈Ik−1,Xk−1
),
πk , p(Xk|{zik}
i∈In
k∈Ik
),
respectively.The above HMM is well-defined for many distributedestimation applications including ones with dynamicstate and time varying observation models. For example,the following transition and observation models can berepresented in the above form:
Xk+1 = f(Xk+1,wk) wk ∼ p(Wk), (1)
Zik+1 = hi(Xk+1,vk) vk ∼ p(Vk), (2)
in which, Wk and Vk are random variables representingdynamics and observation noise. We further assume thateach agent has a processor and a sensor on-board. Sensorsmake observations every ∆t seconds and the processorsand the network can handle calculations based on messagepassing among agents every δt seconds. We assume thatδt� ∆t. We also assume that the agents exchange theirinformation over the communication channel which is freeof both delay and error. Note that the above specificationfor the HMM and the model may easily be extended toinclude control inputs but they are omitted as they arenot the focus this paper.
Henceforward, {Zik}i∈In
k∈Ikis the indexed family of all
the observations made by all the agents up to step k.Moreover, for each agent i, the variable Rij
k , j ∈ N i
denotes the information that node i receives from nodej, its neighbor at time k. The set Ri
k contains all theinformation that node i has received from its neighbors upto step k and Iik = Ri
k∪Zik represents all the informationcontent that is available to agent i at time k. (In general,in this paper, the information in the variable that bearsthe superscript i is a version local to the ith agent.Moreover, symbol η with or without any sub/superscriptis a normalizing constant.)
III. DISTRIBUTED STATE ESTIMATION
AT: In this section we will review some concepts inDistributed State Estimation that help us better understandthe details of the proposed method in the next section.We first define Recursive State Estimation in the contextof HMMs; then, we will discuss what we mean byCentralized Estimation in the context of networkedsystems. We proceed to define a CL class method calledDistributed Consensus Based Filtering which is particularto systems where agents have the same prior information.Given that network disconnection and early stopping ofthe consensus process results in different priors among theagents, we review Conservative Fusion and its iterativeversion as a remedy for such cases. After reading thissection, the reader will find it easier to understand thelogic behind the proposed method outlined in the nextsection.
In the context of HMMs, Recursive State Estimation isthe process of recursively computing the posterior proba-

bility of a random dynamic process Xk conditioned on asequence of measurements {zik}
i∈In
k∈Ik. Bayesian recursive
filtering, in a process with the Markov assumptions, hasthe form
p(Xk|zk) =1
ηp(zk|Xk)p(Xk|zk−1,Xk−1) (3)
=1
η
n∏i=1
p(zik|Xk)
∫p(Xk|Xk−1)p(Xk−1|zk−1)dXk−1.
Performing recursive estimation in a sensor networksetting and for an HMM can be done in one of thefollowing ways:
Centralized Estimation involves a single distinguishednode in the network that receives observations zIn
k ,{zik}i∈In from the rest. The above Bayesian filteringrecursion for step k of a finite state HMM consists offirst calculating the prediction πk according to
πk = πk−1Pk|k−1, (4)
then, updating via
πk =1
ηπkOk, (5)
where Ok is an ns × ns diagonal matrix of likelihoods,p(zIn
k |Xk).Distributed Consensus Based Filtering is based on
the insight that in (3) one can see that if all agentsshare the same prior information, they can recover thecentralized estimator’s performance if they can reach aconsensus over the product of measurement probabilities.Distributed averaging methods can be applied here as thenodes need to reach a consensus over the log of the jointmeasurement probabilities (log-likelihood),i.e.,
lk =1
nlog
n∏i=1
Oik =1
n
n∑i=1
logOik =1
n
n∑i=1
lik. (6)
Once consensus is reached, the updated estimate is
πk =1
η
prediction︷ ︸︸ ︷πk−1︸ ︷︷ ︸
prior
Pk|k−1 enlk︸︷︷︸likelihood
. (7)
Coming to some consensus over likelihoods can beachieved for the discrete state variables using a distributedaveraging method based on Metropolis-Hastings MarkovChains (MHMC). To avoid confusion we use m toindicate consensus iterations throughout this paper. On acommunication graph G one can use a message passingprotocol of the form
ψi(m+ 1) =∑|Ni|j=1γij(m)ψj(m), (8)
s.t.∑m
γij(m) = 1, ψi(0) = lik,
to calculate the average of the values on the graph nodesin which di(m) = |N i| is the degree of the node vi, and
γij(m) =
1
1+max{di(m),dj(m)} if (i, j) ∈ Em,1−
∑(i,n)∈E
γin if i = j,
0 otherwise.
(9)
With this messaging passing protocol,
limm→∞
ψi(m) = lk.
Note that for each node i, the γij’s depend only onthe degrees of its neighboring nodes. As stated earlier,once consensus has been reached over likelihoods, thecentralized estimate can be recovered. The prerequisite forthis method to work is that the network remains connected.This requirement, however, is too restrictive for manyapplications. Conservative Approximate Distributed Fil-tering is an approach where, instead of putting effort intokeeping the dependencies between agents’ information,a fusion rule is designed to guarantee that no doublecounting of mutual information occurs. This usuallyresults in the replacement of independent informationwith some form of conservative approximation. Such atreatment results in inferior performance, compared tothe exact distributed filter’s output that is degraded.
AT: Since Conservative Approximate DistributedFiltering relies on fusion rules that combine conservativeapproximation of local PMFs. , we need to clarify whatconstitutes a conservative approximation for a PMF.Then, understanding the mechanics of conservative fusionbecomes easier.
Conservative approximation of a Probability MassFunction (PMF) is possible under certain conditions. Theauthors in [25] introduced a set of sufficient conditionsfor a PMF p(X) to satisfy in order to be a conservativeapproximation of p(X), a second PMF. The conditionsare• the property of non-decreasing entropy:
H(p(X)) ≤ H(p(X)),
• the order preservation property so that,
p(xi) ≤ p(xj) iff p(xi) ≤ p(xj), ∀xi,xj ∈ X.
Conservative Fusion of two PMFs (CF) can beachieved for two probability distribution functionspa(X|Ia) and pb(X|Ib), with the Geometric Mean Den-sity Rule (GMD):
pc(X) =1
ηcpa(X|Ia)ωpb(X|Ib)1−ω
=1
ηcpa(X|Ia \ Ib)ωpb(X|Ib \ Ib)1−ωpa(X|Ia ∩ Ib),
(10)

in which, 0 ≤ ω ≤ 1. Note that in the above equation thePMFs are raised to the power of ω and multiplied togetherelement-wise. This rule never double counts mutualinformation, replacing independent components with aconservative approximation. The interesting property ofthis fusion rule is that it works without the knowledgeof the dependence of the two initial PMFs. This rulecan also be generalized to more than two PMFs. Forexample, in the context of this paper, node i calculatesa conservative approximation of the centralized estimateand stores it in πi. The GMD fusion of these estimatesis also a conservative approximation of the centralizedestimate.
πk =1
η
n∏i=1
(πik)ωi, s.t.
∑ni=1 ωi = 1. (11)
Remark 1. Several criteria have been proposed to choosethe ωi. One such criterion is [26]:
π = arg minπ
maxi{D(π‖πi)}, (12)
in which the D(π‖πi) is the Kullback-Leibler divergencebetween π and πi.
Remark 2. In [25], it is shown that raising a PMF to thepower of ω ≤ 1 reduces its entropy. From (11) it can beseen that applying the GMD rule reduces the entropy ofthe likelihood probabilities that are independent. This isundesirable and can be avoided by treating the likelihoodprobabilities separately.
Iterative CF (ICF) is achieved as follows. At firstiteration of consensus, m = 0, for each agent j, takethe current local estimate AT: πjk−1 and calculate theprediction πjk. Initialize the local consensus variable tobe
φj(0) =1
ηiπjkO
jk.
Let ω = {ωj}j∈INi(m) and find ω∗ such that
ω∗ = arg minωJ(1
η
∏j∈N i(m)
[φj(m)
]ωj),
s.t.∏
j∈N i(m)ωj = 1, ∀j, ωj ≥ 0,
(13)
where η is the normalization constant and J (·) is anoptimization objective function. Specifically, it can beentropy H(·) or the criteria in (12). The φis are thenupdated locally for the next iteration as
φi(m+ 1) =1
η∗
∏j∈N i(m)
[φj(m)
]ω∗j . (14)
It is straightforward to show that after reaching consensus,for all j ∈ CCik, local variables φj(m) converge to aunique φ∗, and moreover, φ∗ is a convex combination
of initial consensus variables of all the agents in the setCCik, AT: i.e. ,
limm→∞
φi(m) = φ∗ =1
η
∏j∈ICCi
k
[φj(0)
]ω∗j ,∀i ∈ CCik.
(15)To repeat the process iteratively, set πjk+1 = φ∗,∀j ∈CCik and repeat the whole process for step k + 1.
IV. HYBRID ICF AND CL
We propose a Hybrid approach that uses ICF to reachconsensus over priors and the Distributed ConsensusBased Filtering method (outlined above, which we referto as CL hereafter) for distributed averaging of localinformation updates. Our method is summarized inAlgorithm 1. Imagine a scenario consisting of n agents,observing xk, the state of a Markov chain at time k,that are communicating with each other through a time-varying network topology. Initially, the agents start withpriors {πi0}i∈In . At step k the chain transitions to the newstate xk and agents calculate their own local prediction{πik}i∈In (line 1 in the algorithm). Then they makeobservations {zik}i∈In , and compute the local likelihoodmatrices {Oik}i∈In (line 2 in the algorithm).
In the rest of the algorithm, the ICF approach is usedto find a consensus over the priors using (13) recursively.The CL approach is used to form the consensus over thenew information available to agent i from other agents itis path-connected to, i.e.,
∑j∈ICCi
k
lik. In line 12 of the
algorithm, |CCik| is the number of agents that form aconnected group with agent i, and can be determined byassigning unique IDs to the agents and passing these IDsalong with the consensus variables. Each agent keepstrack of the unique IDs it receives and passes them toits neighbors.
To better understand the benefit of the Hybrid method,we compare the estimator performances under centralized,ICF, and Hybrid schemes. The following set of equationscompares the estimates
CENπk+1 =1
ηCENπk
∏j∈In
Ojk, (16)
ICFπik+1 =1
η′
∏j∈ICCi
k
[ICFπjk]ω
ICFj
∏j∈ICCi
k
[Ojk]ω
ICFj , (17)
HYBπik+1 =1
η′′
∏j∈ICCi
k
[HYBπjk]ω
HYBj
∏j∈ICCi
k
Ojk. (18)
Remark 3. The value produced as a prediction fromthe centralized scheme is approximated by both the ICFand Hybrid methods. Hybrid’s performance gain overICF comes from the fact that, unlike ICF, it does notdown-weight observations. This improvement becomes

increasingly pronounced as number of agents increase,showing the scalibility of the Hybrid method.Remark 4. The above equations demonstrate why, unlikeICF, the Hybrid method is capable of recovering thecentralized estimate if, after a disconnection, the networkremains path-connected long enough thereafter. Assumethat a subset of agents resume connection at time kafter having being disconnected for some time. Theagents will have different priors at time k, and thustheir update steps are computed with either (17) for ICF,or (18) for Hybrid. In general, at this point, either ofthe posteriors can be closer to the centralized estimate.However, as time goes forward, only the Hybrid methodwill recover the centralized estimate if the system retainspath connectivity globally. This is because the priorsof the centralized estimate and the Hybrid methodreconcile due to the forgetting property of Markovchains AT: [27]. According to this property a recursiveestimator on a HMM will exponentially forget the initialdistribution of the HMM. This implies that after anextended interval of path connectivity, the mismatch oflocal priors becomes irrelevant and the Hybrid methodcan reap the benefit of its consensus based fusion partand match the performance of the centralized estimatorwhile ICF will continue fusing the local estimates witha conservative fusion rule and thus loss performancecompared to centralized and Hybrid estimators.Remark 5. The line of reasoning in the preceding remarkholds for connected components as well. This providesevidence for the effectiveness of the Hybrid estimator’sperformance modulo network connectivity, and thus itsrobustness to network failure.
V. EXPERIMENTS
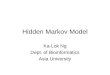
The first experiment is concerned with a decentralizedtarget pose estimation problem in a grid using multiple ob-servers connected through a changing topology network.Fig. 1 depicts the 2D grid in which a target performs arandom walk while six observers are trying to estimateits position. Each white cell is modeled as a single stateof our HMM representing the position of the target onthe grid. The observers’ motion is deterministic; four ofthem are rooks moving along the borders and the othertwo are bishops moving diagonally on the grid. In orderto detect the target, each observer emits a straight beam,normal to its direction of motion, as shown in the figure.The beam hits either the target or an obstacle. In theformer case, the observer senses the position of the targetbased on a discrete one dimensional Gaussian distributionover the states that the beam has traversed; in the lattercase, under the assumption of no false positives, theobserver produces a ‘no target’ symbol as an additionalstate (which is incorporated into the observation model
Algorithm 1: Hybrid Method
Input : πik−11 Use (5) to calculate πik2 Collect local observation zik and calculate Oik and lik3 Initialize consensus variables
φi(0) = πik, ψi(0) = lik
4 m = 05 while NOT CONVERGED do6 BROADCAST[ψi(m), φi(m)]7 RECEIVE[ψj(m), φj(m)] ∀j ∈ N i
8 Collect received data
Ci(m) = {φj∈Ni
(m)}, Mi(m) = {ψj∈Ni
(m)}
9 Do one iteration of AT: ICF on consensusvariables for local prior information Cim
φi(m+ 1) = ICF(Ci(m))
10 Do one iteration of MHMC on consensusvariables for new information
ψi(m+ 1) = MHMC(Mi(m))
11 m = m+ 1
12 Calculate the posteriors according to:
πik = e|CCjk|ψ
i(m)φi(m)
by setting zero probabilities in the likelihood matrix forthose states that beam has traveled through to hit a wall).
At each Markov transition, each observer carries out itsdecentralized estimation step for the position of the target,which is shared with other connected observers through acommunication network. The network topology has twocomponents; one has the rook observers and the otherone has the bishops. The observers in each componentare always connected while the link between the twocomponents is intermittent. All communications occur ata higher rate than Markov transition steps, which allowsthe connected nodes to reach consensus over the sharedinformation.
We evaluate the performance of the proposed Hybridmethod during the phase where the rooks becomedisconnected from bishops, and are then reconnectedafter some interval. For purposes of comparison, eachnode performs three estimation processes. In one instanceit uses our Hybrid method to fuse its prior along withthe received priors. In the second instance it uses theICF method to fuse its posterior along with the receivedposteriors. The third instance concerns a hypotheticalgod’s-eye-view centralized estimator, to give a baseline

Fig. 1. The grid map of the environment, dark cells depict obstacles;blue circles are trackers and the red circle is the ground truth location ofthe maneuvering target; the green circle depicts the AT: observation of anagent.
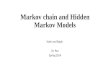
Fig. 2. Estimation performance in the tracking example
for comparison. To quantify differences, we use the AT:Bhattacharyya Coefficient [28] between the estimationresults and the centralized estimator. The Bhattacharyyacoefficient can be used to evaluate the similarity of twoprobability mass functions, π1(X), π2(X) as:
BC(π1(X), π2(X)) =∑
x∈X√π1(x)π2(x). (19)
In the case of P1 = P2, complete similarity,
BC(p1, p2) = 1, while BC(p1, p2) = 0 means completedissimilarity.
Fig. 2 compares the performance of the Hybrid and ICFmethods, showing that the proposed method outperformsCF and is able to recover performance very close tocentralized solution after reconnection. Based on theBhattacharyya coefficient, closeness between centralizedand decentralized estimates drops during the interval ofnetwork partition. This is expected, since observers donot have access to all the information available to thecentralized estimator. While the Hybrid method is able tostart to recover immediately after reconnection, ICF con-tinues with degraded performance even after reconnectionowing to the fact that it ignores the correlations.
Fig. 2 also gives a detailed view of the performanceof the Hybrid method and compares the estimationresults of observer 3, a rook, and observer 5, a bishop,during three different time steps. The shaded area showsthe time during which rooks are disconnected fromthe bishops. The higher difference between centralizedand decentralized estimate for the fifth observer can beexplained based on the fact that the bishop has lessinformation at its disposal. However, after reconnectionboth groups are able to converge to the same value, whichis very close to the centralized estimator.
In a second experiment we have evaluated the robust-ness of the proposed method for networks with differentlikelihoods of link failure. We report the Bhattacharyyacoefficient, and AT: Hellinger distance vs. link failureprobability for a general decentralized HMM with anetwork of size 20 and state size 30 with each noderoughly connected to 10% of the other nodes. We simulatethe system multiple times, each time for 150 time stepsbut with different probability of link failure. At thebeginning of each step, a 2 regular graph with 15 nodes isgenerated and, given a probability of failure for each link,some links in the graph will randomly be disconnected.The graph still remains connected some portion of thetime, but this depends on the degree and probabilityof failure. If the regularity degree goes down or theprobability of failure increases, more often than not, thegraph becomes disconnected. In practice, for p ≥ 0.05,consensus methods that rely on AT: full connectivity nolonger succeed since the network almost always suffersdisconnection at some point in time.
We ran our method for 150 steps for a range ofprobabilities of link failure and compared performanceswith the ideal centralized result (which is obtained byassuming full connectivity at all times). The performanceis evaluated by calculating the average value for theBhattacharyya coefficient and determinant ratio measureat all steps and for all receptors. Based on Fig. 3, forthe case considered in this experiment, our decentralized

CFCF
Fig. 3. Performance comparison between the proposed method and ICF.
estimator performs close to the ideal centralized one forp ∈ [0.0, 0.1], drastically outperforming ICF in all cases.This means that in the case considered here, our methodcan perform almost as well as the ideal estimator foran unreliable network. Obviously the performance canvary from one system to another and under differentnetwork topologies, but the results show that the methodcan recover the performance of the centralized methoddespite operating on an unreliable network and, moreover,substantially outperforms ICF. This latter fact has alsoalready been established theoretically.
VI. CONCLUSION
This paper proposes a distributed state estimator fordiscrete-state dynamic systems with non-Gaussian noisein networks with changing topology and those that do notremain connected all the time. Separating the process ofconsensus for the correlated and uncorrelated informationwas the key to achieving better performance compared toICF alone. Evaluating the proposed method on a multi-agent tracking application and a high-dimensional HMMdistributed state estimator problem showed substantialperformance improvement compared to the state of theart. We are able to achieve robustness and recoverperformance after a disconnection interval occurs.
REFERENCES
[1] H. Durrant-Whyte, M. Stevens, and E. Nettleton, “Data fusion indecentralised sensing networks,” in Proceedings of the 4th InternationalConference on Information Fusion, 2001, pp. 302–307.
[2] M. E. Campbell and N. R. Ahmed, “Distributed data fusion: Neighbors,rumors, and the art of collective knowledge,” IEEE Control Systems,vol. 36, no. 4, pp. 83–109, 2016.
[3] F. Boem, L. Sabattini, and C. Secchi, “Decentralized state estimationfor heterogeneous multi-agent systems,” in Decision and Control(CDC), 2015 IEEE 54th Annual Conference on. IEEE, 2015, pp.4121–4126.
[4] N. R. Ahmed, S. J. Julier, J. R. Schoenberg, and M. E. Campbell,“Decentralized bayesian fusion in networks with non-gaussian uncer-tainties,” Multisensor Data Fusion: From Algorithms and ArchitecturalDesign to Applications, p. 383, 2015.
[5] H. Zhang, J. Moura, and B. Krogh, “Dynamic field estimation usingwireless sensor networks: Tradeoffs between estimation error andcommunication cost,” Signal Processing, IEEE Transactions on, vol. 57,no. 6, pp. 2383–2395, June 2009.
[6] A. Simonetto, T. Keviczky, and R. Babuka, “Distributed nonlinearestimation for robot localization using weighted consensus,” in IEEEInternational Conference on Robotics and Automation, May 2010, pp.3026–3031.
[7] W. W. Whitacre and M. E. Campbell, “Cooperative estimation usingmobile sensor nodes in the presence of communication loss,” Journalof Aerospace Information Systems, vol. 10, no. 3, pp. 114–130, 2013.
[8] L. Xiao, S. Boyd, and S. Lall, “A scheme for robust distributedsensor fusion based on average consensus,” in Proceedings of the4th International Symposium on Information processing in sensornetworks. IEEE Press, 2005, p. 9.
[9] R. Olfati-Saber, “Distributed kalman filter with embedded consensusfilters,” in Decision and Control, and European Control Conference.CDC-ECC’05. IEEE, 2005, pp. 8179–8184.
[10] G. Battistelli, L. Chisci, and C. Fantacci, “Parallel consensus onlikelihoods and priors for networked nonlinear filtering,” IEEE SignalProcessing Letters, vol. 21, no. 7, pp. 787–791, 2014.
[11] C. V. Rao, J. B. Rawlings, and D. Q. Mayne, “Constrained stateestimation for nonlinear discrete-time systems: Stability and movinghorizon approximations,” IEEE transactions on automatic control,vol. 48, no. 2, pp. 246–258, 2003.
[12] F. Boem, R. M. Ferrari, T. Parisini, and M. M. Polycarpou, “Distributedfault diagnosis for continuous-time nonlinear systems: The input–output case,” Annual Reviews in Control, vol. 37, no. 1, pp. 163–169,2013.
[13] J. Hu, D. Chen, and J. Du, “State estimation for a class of discrete non-linear systems with randomly occurring uncertainties and distributedsensor delays,” International Journal of General Systems, vol. 43, no.3-4, pp. 387–401, 2014.
[14] O. Hlinka, F. Hlawatsch, and P. M. Djuric, “Distributed particle filteringin agent networks: A survey, classification, and comparison,” IEEESignal Processing Magazine, vol. 30, no. 1, pp. 61–81, 2013.
[15] A. Tamjidi, S. Chakravorty, and D. Shell, “Unifying consensus andcovariance intersection for decentralized state estimation,” in IntelligentRobots and Systems, IEEE/RSJ International Conference on, 2016, pp.125–130.
[16] Y. Wang and X. Li, “Distributed estimation fusion with unavailablecross-correlation,” Aerospace and Electronic Systems, IEEE Transac-tions on, vol. 48, no. 1, pp. 259–278, Jan 2012.
[17] J. Hu, L. Xie, and C. Zhang, “Diffusion kalman filtering based oncovariance intersection,” Signal Processing, IEEE Transactions on,vol. 60, no. 2, pp. 891–902, 2012.
[18] F. S. Cattivelli and A. H. Sayed, “Diffusion strategies for distributedkalman filtering and smoothing,” IEEE Transactions on automaticcontrol, vol. 55, no. 9, pp. 2069–2084, 2010.
[19] G. Battistelli and L. Chisci, “Stability of consensus extended kalmanfilter for distributed state estimation,” Automatica, vol. 68, pp. 169–178,2016.
[20] D. Casbeer and R. Beard, “Distributed information filtering usingconsensus filters,” in American Control Conference. ACC, June 2009,pp. 1882–1887.
[21] L. Mao and D. W. Yang, “Distributed information fusion particlefilter,” in Intelligent Human-Machine Systems and Cybernetics, SixthInternational Conference on, vol. 1, Aug 2014, pp. 194–197.
[22] O. Hlinka, O. Sluciak, F. Hlawatsch, P. M. Djuric, and M. Rupp,“Likelihood consensus and its application to distributed particlefiltering,” IEEE Transactions on Signal Processing, vol. 60, no. 8, pp.4334–4349, 2012.
[23] W. Li and Y. Jia, “Distributed consensus filtering for discrete-timenonlinear systems with non-gaussian noise,” Signal Processing, vol. 92,no. 10, pp. 2464–2470, 2012.
[24] G. Battistelli and L. Chisci, “Kullback–leibler average, consensus onprobability densities, and distributed state estimation with guaranteedstability,” Automatica, vol. 50, no. 3, pp. 707–718, 2014.
[25] T. Bailey, S. Julier, and G. Agamennoni, “On conservative fusion ofinformation with unknown non-gaussian dependence,” in InformationFusion (FUSION), 2012 International Conference on, 2012, pp. 1876–1883.
[26] J. Ajgl and M. Simandl, “Design of a robust fusion of probabilitydensities,” in American Control Conference (ACC), 2015. IEEE,2015, pp. 4204–4209.

[27] B. D. Anderson, “Forgetting properties for hidden markov models,”in Proc. AFOSWDSTO Workshop, 1997.
[28] A. Bhattacharyya, “On a measure of divergence between two multi-
nomial populations,” Sankhya: The Indian Journal of Statistics, pp.401–406, 1946.