-
4.3.2015
1
Understanding Mechanical
System Requirements
EES 472 Electric Drives
Assoc. Prof. Dr. Mutlu BOZTEPE Ege University, 2015
Motivation
How can the ASD accelerate and decelerate the load to
give desired speed profile
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
2
-
4.3.2015
2
Systems With Linear Motion
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
3
Rotating Systems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
4
-
4.3.2015
3
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
5
Rotating Systems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
6
-
4.3.2015
4
Calculation of Moment of Inertia J of a Uniform Cylinder
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
7
Accelaration, Speed and Position, Power and Energy
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
8
-
4.3.2015
5
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
9
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
10
-
4.3.2015
6
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
11
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
12
-
4.3.2015
7
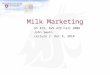
Frictional Torque
Need for a high force (torque) in the beginning (from rest) to
set an
object in motion. This friction is called stiction.
Once in motion, the friction may consist of a component
called
coulomb friction which remains independent of speed
magnitude
(always opposes rotation) or
another component called viscous
friction which increases
linearly with speed.
In general the friction torque has
all aforementioned components.
However it can be linearized
for an approximate analysis
as shown dotted line in which
characteristics is similar to that
of viscous friction.
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
13
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
14
-
4.3.2015
8
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
15
Torsional Resonances
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
16
-
4.3.2015
9
Mechanical - Electrical Analogy
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
17
Electrical Analogy of Motor & Load
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
18
-
4.3.2015
10
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
19
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
20
-
4.3.2015
11
Coupling Mechanisms
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
21
Conversion between Linear and Rotary Systems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
22
-
4.3.2015
12
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
23
Gears
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
24
-
4.3.2015
13
Gears (contd)
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
25
Optimum gear ratio to minimize Tem
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
26
Tem and load acceleration!
-
4.3.2015
14
Types of Loads
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
27
Centrifugal loads
Tork ~ speed2
Power ~ speed3
Types of Loads
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
28
Constant Torque loads
Tork =constantPower ~ speed
-
4.3.2015
15
Types of Loads
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
29
Squared power loads
Tork ~ speedPower ~ speed2
Types of Loads
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
30
Constant power loads
Tork beyond a certain speed rangevaries inversely with
speedPower =constant
-
4.3.2015
16
Four-Quadrant Operation
In many high performance systems, drives are required to operate
in
all quadrants of torque-speed plane.
In order to control the load speed rapidly, it may be necessary
to
operate the system inn the regenerative breaking mode.
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
31
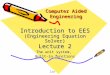
Steady-state stability
The equilibrium point A is termed as stable if the operating
point
restores itself after small disturbance in the motor or
load.
Assume that disturbance casuses a reduction of m in speed.
At new speed motor torque is greater than load torque,
consequently
motor will accelerate and operation will be restores to point
A.
Therefore the drive is steady-state stable at point A.
For point B, a decrease in speed causes load torque is greater
than
motor torque, drive decelerates and operating point moves away
from
point B. Thus, point B is unstable point.
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
32
-
4.3.2015
17
Steady-state stability Alternative approach
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
33
Let a small perturbation in speed, m results in T and Tl
perturbations.
Removing average quantitites and rearranging the terms gives
For small perturbations, the speed-torque curves of motor and
load can be assumed to be straight lines. Thus,
where dT/dw terms are the slopes. By substituting these Eq. into
above Eq. gives
Solution of this 1st order differential equation.
For m 0
Dynamic Operation
How the operating point changes with time
Important for High Performance Drives
Speed change: rapid and without any oscillations
Requires good controller design
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
34
-
4.3.2015
18
Summary
What are the MKS units for force, torque, linear velocity,
angular
velocity, speed, and power?
What is the relationship between force, torque, and power?
Show that torque is the fundamental variable in
controllingspeed
and position.
What is the kinetic energy stored in a moving mass and
arotating
inertia?
What is the mechanism for torsional resonances?
What are the various types of coupling mechanisms?
What is the optimum gear ratio to minimize the torque required
from
the drive to accelerate a load?
What are the torque-speed and the power-speed profiles for
various
types of loads?
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
35
Problems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
36
-
4.3.2015
19
Problems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
37
Problems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
38
-
4.3.2015
20
Problems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
39
Problems
EE472 Electric Drives, Dr. Mutlu Boztepe, Ege University, 2015
40