Embed Size (px)
Citation preview

APS/123-QED
Effective elastic theory of smectic-A and -C liquid crystals
Hiroto Ogawa∗Department of Physics, Tohoku University,
Sendai, 980-8578, Japan
(Dated: April 17, 2007)
We analytically derive the effective layer elastic energy of smectic-A and smectic-C liquid crystalsby adiabatic elimination of the orientational degree of freedom from the generalised Chen-Lubenskymodel. In the smectic-A case, the effective layer bending elastic modulus is calculated as a function ofthe wavelength of the layer undulation mode. It turns out that an unlocking of the layer normal andthe director reduces the layer bending rigidity for wavelengths smaller than the director penetrationlength. In the achiral smectic-C case, an anisotropic bending elasticity appears due to the couplingbetween the layer displacement and director. The effective layer bending rigidity is calculated asa function of the angle ϑ between the layer undulation wave-vector and the uniform director field.We compute the energetically most favorable angle θ, which varies from 0 to 90 depending on thetilt angle, undulation wave-length and other parameters. We then demonstrate the reorientation ofdirector and the anisotropic wave propagation in the presence of an oscillatory wall and a vibratingcylindrical source respectively, by means of a hydrodynamic simulation.
PACS numbers: 61.30.Dk, 42.70.Df, 46.40.Cd, 62.20.Dc
I. INTRODUCTION
Liquid crystals have many fascinating physical proper-ties, because they have both the molecular position andthe molecular orientation as degrees of freedom [1]. Thismultiplicity gives rise to interesting phase transition be-haviors, including the tricritical and the Lifshitz pointin the phase diagram with single liquid crystal compo-nent [2], where respectively, the first and second ordertransitions are switched [3, 4], and three phases (i.e., thenematic, smectic-A (Sm-A) and smectic-C (Sm-C)) co-exist [5, 6]. To explain the phase behavior around thenematic-Sm-A-Sm-C (NAC) Lifshitz point theoretically,there has been a variety of models devised [7–12]. deGennes [7] and Chu and McMillan [8] introduced a tiltangle and an in-plane director as new degrees of freedomrespectively. Chen and Lubensky [9] took fourth orderdensity gradient terms in the model free energy. Ben-guigui [10] and Huang and Lien [11] adopted a smectic-Cscalar order parameter together with a smectic-A orderparameter. Grinstein and Toner [12] also used the two-dimensional in-plane director component to describe thefree energy. Among them, the Chen-Lubensky modelis supported by not a few X-ray scattering experiments[13–15].
In the smectic phase, the layer order and the direc-tor often cause a frustration. In chiral liquid crystals,geometrical incompatibility of a uniform smectic orderand a helical director configuration leads to a rich va-riety of defect phases [16]. They can be discussed withthe Landau-de Gennes model, utilizing an analogy withsuperconductors in the magnetic field, where the smec-
∗Electronic address: [email protected]
tic order parameter, the director vector and the chiralityare identified with the wave function of the supercon-ducting particle, the electromagnetic vector potential andthe external magnetic field, respectively [17]. The twist-grain-boundary (TGB) phase is the simplest defect phasewhere the groups of planes, containing parallel screw dis-locations, are regularly stacked with the dislocations inadjacent planes tilted each other at a constant angle, andfinite length smectic slabs are inserted between the dis-location planes [18, 19]. The Chen-Lubensky model, ahigher order extension of the Landau-de Gennes model, isagain successful in explaining of the structure and phasetransition of the TGBA and TGBC phase, which havethe Sm-A-like and Sm-C-like slabs respectively [20, 21].More complex defect structures such as cholesteric andsmectic blue phases have been discovered [16]. The cubicsmectic blue phase (Sm-BPI) is comprised of a three-dimensional cubic disclination lattice, whose lattice con-stant is in the order of the light wavelength [22, 23]. Theisotropic smectic blue phase (Sm-BPIso) has fluid-likerheological properties and the detailed structure is com-pletely unknown [24]. Such novel defect structures couldbe understood with the Landau-de Gennes and Chen-Lubensky models presented above. However, these phe-nomenological models are not appropriate for theoreticalexplanations of these phases, because of the highly com-plex spatial structure together with the quite intricatefree energy. DiDonna and Kamien make use of a simplerphenomenological model to discuss the stability of thecubic blue phase [23]. In their Landau-Peierls form, thedirector is assumed to be parallel to the layer normal.However, a tilt of the director from the layer normal isreported to weaken the layer bending elasticity in the nu-merical simulation of the TGBA phase [25], and to changethe structural symmetry of the smectic blue phases inthe experimental study [26]. Such anomalous properties

2
in the TGB and the smectic blue phases have their originin a nontrivial elastic mechanism of the undulated smec-tic layer, combined with the director degree of freedom.So a modification of the Landau-Peierls model, accommo-dating the director elasticity of smectic-A and smectic-Cphases, would help the understanding of the complex lay-ered structures. In addition, the Landau-Peierls modelhas the same layer compression and bending elastic en-ergy forms as those of the other layered materials such aspolymers and surfactant system [27, 28]. So character-istic features of liquid crystals are not very apparent inthe quite simplified Landau-Peierls model. The directorin liquid crystals should affect the layer elasticity, whilepolymers do not posses an orientational degree of free-dom especially in the weak segregation limit [29]. Thusit is worthwhile to derive the intermediately simple modeldirectly from the Chen-Lubensky free energy, eliminat-ing the variation of the director degree of freedom, toclafity the role of the director elasticity in smectic liquidcrystals.
Dynamics of smectic-C layers is also an interestingtopic of liquid crystals [1, 30–33]. The director com-ponent parallel to layer (c-vector) plays an importantrole on the static and dynamic pattern formation dueto the anisotropic elasticity and interaction with flowfield [34, 35]. Shear flow reorientates the c-vector and re-sults in a novel target pattern with disclination [35, 36].On the other hand, an oscillatory wave travelling per-pendicular to the layer normal also rotates the c-vector,because of the static coupling between the layer displace-ment and the director, together with the rotational vis-cosity [1, 37]. With the static and dynamic couplings,the c-vector can be aligned in a certain direction, even ina uniform oscillatory wave. It might be useful for appli-cation, for instance, mechanically-active optical devicesand sensitive acoustic sensors [37–40].
This paper is organized as follows. In Section II, wereview the original Landau-de Gennes model and derivethe effective elastic energy of the Sm-A phase. The anal-ysis is extended to the Sm-A and Sm-C phases with thegeneralized Chen-Lubensky model in Section III. Next weconduct a hydrodynamic simulation for the Sm-C layerin Section IV. We conclude in Section V.
II. LANDAU-DE GENNES MODEL FORSMECTIC-A PHASE
In this section, we briefly review the Landau-de Gennesmodel for Sm-A phase, and then calculate the effectivelayer elastic energy in terms of the layer displacementfield. The physical meaning of the results are discussedqualitatively.
Smectic liquid crystals can be described by the den-sity modulation Ψ(r) and the director n(r). The densityfield Ψ(r) is a complex order parameter with the absolutevalue being the amplitude of the smectic order and thephase describing the layer displacement [17]. The anal-
ogy between liquid crystals and superconductors leads tothe phenomenological Landau-de Gennes model for theSm-A liquid crystals
F = Flayer + Fcpl + FFrank, (1a)
Flayer =∫
dr[τ |Ψ|2 +
g
2|Ψ|4
], (1b)
Fcpl =∫
dr12
[B‖ |(n · ∇ − iq0)Ψ|2 + B⊥ |n ×∇Ψ|2
],
(1c)
FFrank =∫
dr12
[K1(∇ · n)2 + K2(n · ∇ × n)2
+K3(n ×∇× n)2]. (1d)
The double-well potential Flayer describes the Nematic-Sm-A (NA) transition. The dimensionless temperature τis positive (negative) above (below) the NA point. Theconstant B is the layer compression elastic coefficientwhich adjusts the layer width to the equilibrium valued = 2π/q0. The Frank elastic constants Ki (i = 1, 2, 3)correspond to the splay (i = 1), the twist (i = 2) and thebend (i = 3) deformations, respectively.
We consider a perturbation of the uniform Sm-A struc-ture far below the NA point, to see the effect of the direc-tor tilt from the layer normal. For this purpose, we setB‖ = B⊥ ≡ B and K1 = K2 = K3 ≡ K to simplify thediscussion. A more general case is considered in the nextsection for the Chen-Lubensky model. The amplitude ofthe smectic layer order is the equilibrium value at lowtemperature, so we assume
Ψ(r) = Ψ0 exp[iq0(z − u(r))](
Ψ0 =√
τ
g
), (2)
where the z-axis is set along the equilibrium layer normal,and the layer displacement field u(r) is introduced. Thedirector n can be divided into its spatial average and thedeviation:
n(r) = ez + δn(r). (3)
The free energy components Fcpl and FFrank are
Fcpl =∫
drBΨ2
0q20
2|∇u + δn|2 , (4a)
FFrank =∫
drK
2|∇δn|2 , (4b)
where |∇δn|2 = (∂iδnj)2 (repeated indices are summedup). We next derive the linear effective free energy whichcontains only the layer displacement field u(r). To dothis, the director is adiabatically eliminated with theequation,
(1¯− nn) · δF
δn= 0. (5)
The factor 1¯− nn ensures the normalization |n|2 = 1,
and δnz = 0 because |ez + δn| = 1. Using (4a), (4b) and

3
(5), We obtain
δnj = − BΨ20q
20
BΨ20q
20 + Kq2
iqju. (6)
(j = x, y)
Thus the effective free energy is
Feff =12
∫q
[BΨ2
0q20q2
‖ + κ(q)q4⊥ + κ(q)q2
⊥q2‖
]|u|2 .(
κ(q) ≡ K
1 + λ2q2
)(7)
where the penetration length λ =√
K/B/(Ψ0q0) [18].Eq.(7) is identical with the Landau-Peierls free energyexcept for the Lorenzian wave number dependence of thelayer bending elastic coefficient κ(q), and the third crossterm which is higher order contribution [2, 38]. We callthe z-axis and in-plane (x- and y-) axes as the paralleland perpendicular direction respectively (Fig.1).
The deformation wave-number dependence of the layerrigidity κ(q) is interpreted qualitatively. We considerthe pure undulation case with a constant layer thicknessq‖ = 0. This condition is, in fact, a sufficiently goodapproximation for describing experiments [38]. The di-rector variation is parallel to the deformation of the smec-tic layer as seen in (6). This means that only the splaypart |q · δn|2 is nonzero in the three Frank elastic con-tributions. Since the Landau-de Gennes model (1a) hasno layer bending elastic term in the Ψ-dependent part,the effective elasticity comes solely from the splay elas-tic term. In fact, if the director n coincides with thelayer normal m, the splay term is turned into the layerbending elastic energy:
K
2
∫dr (∇ · n)2 =
K
2
∫drH2. (8)
Here we donate the mean curvature of the smectic layerby H. The behavior of κ(q) is explained by comparison
of the deformation scale q−1⊥ and the director correlation
length λ (Fig.1).
(a) q−1⊥ À λ (b) q−1
⊥ . λ
||(= z)
(= x, y)
FIG. 1: Schematic representation of the undulated layerstructure of the Sm-A phase. (a) The director is almost per-pendicular to the layer if q−1
⊥ À λ, (b) while the director andthe layer normal are decoupled at q−1
⊥ . λ.
When the layer deformation scale is much longer thanthe director coherent length λ, the director is locked tothe layer normal. Oppositely, when the undulation wave-length q−1
⊥ is shorter than the penetration length λ, thedirector cannot follow the layer deformation, and thesplay term less contributes to the layer elasticity. We notethat κ(q) can be written also as a function of the root ofthe mean squared (RMS) tilt angle α =
√〈α2〉. With the
smooth undulation u(r) = u0 cos (q⊥ · r) (q⊥ ¿ λ−1),
κ(α) =K
1 +(√
2αλ/u0
)2/3. (9)
The detailed derivation is given in Appendix A. The ef-fective layer bending rigidity decays with the averagedtilt angle α. It implies that the coupling between m andn is certainly essential.
In fact, for any Ψ, the locking term is found in thecoupling term (1c) which we decompose into the paralleland perpendicular parts as
Fcpl =12
∫dr
[B‖
∣∣∣∣n ·(−i∇Ψ0 + Ψ0n(|∇φ| − q0) + Ψ0|∇φ|(m − n)
)∣∣∣∣2+B⊥
∣∣∣∣n ×(−i∇Ψ0 + Ψ0|∇φ|m
)∣∣∣∣2]
(10)
where the complex order parameter is described by theamplitude and the phase: Ψ(r) = Ψ0(r) exp(iφ(r)), andthe gradient of the phase component defines the layernormal vector m(r) = ∇φ/|∇φ|. In the parallel part,
the first term favors a uniform smectic modulation am-plitude, the second is the layer compression energy andthe last term locks the director along the layer normal.Thus in general, even if the layer deformation scale is

4
much larger than the director penetration length λ, theeffective elasticity could be weak at the nonuniform smec-tic amplitude or layer width. In the perpendicular part,on the other hand, the first term is again the amplitudehomogenizing contribution, and the second term reducesthe director component perpendicular to the layer nor-mal (c-vector) as long as the coefficient B⊥ is positive.Therefore, the tilted director smectic-C phase is stablewith a negative B⊥, as we shall see in the next section.
III. GENERALIZED CHEN-LUBENSKY MODELFOR SMECTIC-A AND -C PHASES
In this section, we introduce the Chen-Lubensky modelin the generalized way. Then the effective elastic energyis calculated for both the Sm-A and Sm-C phases. After aphysical interpretation of the Sm-A energy, the effectivelayer bending elasticity of the Sm-C phase is discussedwith some approximations. The resultant anisotropy ofthe bending elasticity is characterized by the angle ϑ be-tween the c-vector and the layer bending direction. Thestate diagrams for the easiest bending angle θ are stud-ied. The free energy as a function of ϑ is also calculated.
A. Generalized Chen-Lubensky model
One can extend the Landau-de Gennes free energy toreproduce the achiral Sm-C phase by adding higher ordergradient terms. The Chen-Lubensky model is given inthe most generalized form:
F = Flayer + F(2)cpl + F
(4)cpl + FFrank, (11a)
Flayer =∫
dr[τ |Ψ|2 +
g
2|Ψ|4
], (11b)
F(2)cpl =
∫dr
[(C‖ninj + C⊥δ⊥ij
)(DiΨ)(DjΨ)∗
],
F(4)cpl =
∫dr
[D‖ |ninjDiDjΨ|2
+D‖⊥
((ninjDiDjΨ)
(δ⊥klDkDlΨ
)∗+ c.c.
)+D⊥
∣∣δ⊥ijDiDjΨ∣∣2] , (11c)
FFrank =∫
dr12
[K1(∇ · n)2 + K2(n · ∇ × n)2
+K3(n ×∇× n)2], (11d)
where the covariant derivative Di = ∂i − iq0ni andδ⊥ij = δij − ninj is the perpendicular projection oper-ator. The free energy components Flayer and FFrank areidentical with those of the Landau-de Gennes model (1a).F
(2)cpl corresponds to Fcpl in (1a). The elastic constants are
C‖ and C⊥ for the gradient second order term F(2)cpl , D‖,
D‖⊥ and D⊥ for the fourth order contribution F(4)cpl . The
multiple elastic constants in the same order is due to themolecular uniaxiality. The physical meaning of the co-
cr~ cr
mr nrα α αcosd
FIG. 2: Schematic representation of the c and c vector definedby the layer normal vector m and the director n. It is obviousthat c → −c in the small tilt limit α → 0.
variant derivative is as follows (Fig.2). With the uniform-amplitude density wave profile Ψ(r) = Ψ0e
iφ(r) and thelayer normal vector m ≡ ∇φ/|∇φ|, the covariant differ-entiation of the equilibrium tilted smectic density func-tion is DΨ = i|∇φ|(m−n cos α)Ψ ≡ ic|∇φ|Ψ, where α isthe angle between n and m, and c is the layer normal vec-tor component perpendicular to the molecular orienta-tion, which coincides with the minus of so-called c-vectorat the small molecular tilt (α ¿ 1). The contribution ofc in the second-order coupling term Fcpl is found onlyin the perpendicular part, because C‖|n · DΨ|2 = 0 andC⊥|n × DΨ|2 = C⊥Ψ2
0|∇φ|2c2. Therefore the nonzeroc-vector Sm-C phase is equilibrated with a combinationof a negative C⊥ and stabilizing fourth-order covariantderivative terms.
The scattering function is readily calculated
S(q) =S0τ
τ + D‖(q‖ − q0)4 + (C‖ + 2D‖⊥q2⊥)(q‖ − q0)2 + D⊥(q2
⊥ − q20⊥)2
, (12)
where we set τ = τ − C2⊥/(4D⊥), q2
0⊥ = −C⊥/(2D⊥). The relations of the present generalized model to other

5
TABLE I: Relationships between the generalized Chen-Lubensky model and the other existing models with the correspondingparameter lists.
model type parameter listoriginal Chen-Lubensky model [9] D‖ = D‖⊥ = 0, D⊥ 6= 0model of [41] D‖ = D‖⊥ = D⊥ 6= 0model of [42] (in the vicinity of q‖ = q0) C‖ = 4D‖q
20 , D‖, D‖⊥, D⊥ 6= 0
Landau-de Gennes model C‖ = B‖/2, C⊥ = B⊥/2, D‖ = D‖⊥ = D⊥ = 0
Chen-Lubensky models are shown in Table I. One canobtain the original Chen-Lubensky model if D‖ = D‖⊥ =0 and D⊥ 6= 0. With C‖ = B‖/2, C⊥ = B⊥/2 and
D‖ = D‖⊥ = D⊥ = 0, the Chen-Lubensky model isreduced to the Landau-de Gennes model (1a).
Sm-A-Sm-C (AC) transition is characterized by thesign of the second order elastic constant C⊥. The Sm-A(C) phase is the equilibrium state if C⊥ is positive (neg-ative). In the Sm-C phase, the equilibrium director tiltsagainst the layer normal at an angle α,
α = tan−1
(1q0
√−C⊥
2D⊥
), (13)
and the density modulation profile is given as
Ψ(r) = Ψ0 exp[iq0
n3(z − u(r))
]. (14)
Next we consider a perturbation of the generalizedChen-Lubensky model. The deformation of the smec-tic layer order parameter Ψ(r) is expressed by the layerdisplacement field u(r). The director perturbation is nowgiven by
δn(r) = n(r) − N , (15)
where N is the equilibrium director and equals(sinα cos ψ, sinα sin ψ, cos α). The azimuthal angle ψis the Goldstone mode in the Sm-C phase. Thedensity modulation profile takes the form Ψ(r) =Ψ0 exp [iq0 (z − u(r)) /N3] instead of (14). Before calcu-lating the variation of the free energy, we use the reducedrepresentations
F =K3
2F , (16a)
F =∫
drf , (16b)
f = fcpl + fFrank. (16c)
The equilibrium condition (5), equivalent to n ‖δF /δn, reads
δF
δn1− N1 + δn1
N3 + δn3
δF
δn3= 0 (17a)
δF
δn2− N2 + δn2
N3 + δn3
δF
δn3= 0. (17b)
The perturbation expansion requires
γiδF
δn3
(0)
=δF
δni
(1)
− γiδF
δn3
(1)
− δni
N3
δF
δn3
(0)
= 0 (i = 1, 2),
(18)
where γi = Ni/N3 (i = 1, 2), and O(n) means the nthorder perturbative part of the variable O in terms of
δn and u. Expressions for(δF /δn
)(0)
and(δF /δn
)(1)
are calculated in Appendix B. Eq.(18) has two possiblesolutions. The Sm-A phase (N = e3) is obtained if(δF /δn3
)(0)
6= 0, otherwise the Sm-C phase with thedirector tilt angle α (13). Stability of each solution isdetermined by the sign of C⊥ as previously stated in thissubsection.
B. Effective Sm-A free energy
The Sm-A case is quite simple: γ1 = γ2 = 0, N3 = 1.From the normalization 2δn3 = −δn2, the leading orderof the coupling energy is obtained with the second orderexpansion of u and δn⊥ = (δn1, δn2),
fcpl = 2C⊥
2δn2
⊥ + 2δn⊥ · ∇⊥u + (∇⊥u)2
+2D‖
(∇2
‖u)2
+ 4D‖⊥∇2‖u
(∇2
⊥u + ∇ · n)
+2D⊥(∇2
⊥u + ∇ · n)2
. (19)
The reduced elastic coefficients are defined by O ≡OΨ2
0q20/K3 (O = C‖, C⊥, D‖, D‖⊥, D⊥). The first and
second terms are basically identical with those of Landau-de Gennes free energy (1a). The inner product δn⊥ ·∇⊥uis the m-n locking term. As for the fourth density gradi-ent contribution, we note that the n-perpendicular layerbending elastic term ∇2
⊥u is always contained in fcpl as-sociated with the splay term ∇·n, due to the covarianceof the free energy. Thus coupling between the layer meancurvature and the director splay terms are derived in a

6
systematic covariant manner as in [43]. The director elas-
tic energy does not appear in the parallel part(∇2
‖u)2
,because the nonzero n-longitudinal derivative of n breaksdown the normalization of the director.
Following the same procedure as in Sec. II, the effec-tive free energy is calculated as
δni(q) = −2i(C⊥ + D‖q
2‖ + D⊥q2
⊥)
2C⊥ + D′q2⊥ + q2
qiu (i = 1, 2), (20)
δn3(r) = 0, (21)
F = K3
∫q
[C‖q
2‖ + D‖q
4‖ + 2D‖⊥q2
‖q⊥ + D⊥q4⊥
+1
2C⊥ + D′q2⊥ + q2
×
C⊥q2⊥
D
′q2⊥ + q2
− 2q2
⊥
(D‖q
2‖ + D⊥q2
⊥
)×
(2C⊥ + D‖q
2‖ + D⊥q2
⊥
)]|u|2, (22)
where∫q [· · · ] ≡
∫dq[· · · ]/(2π)3 is the momentum inte-
gration, κ1 ≡ (K1 − K3)/K1 is the reduced splay modu-lus, and D
′ ≡ 2D⊥ + κ1. We note that the twist Frankenergy K2 does not appear in the effective free energyF . This is because δn⊥ ‖ q⊥ (see (20)), and only thesplay term contributes to the pure layer bending elas-tic energy (q‖ = 0). The layer compression term, onthe other hand, has no director contribution, becausethe layer width strain energy should be the quadraticform of ∂zu + δnz, and δnz, being higher order term,is neglected. Next we compare the previous Landau-deGennes and the present Chen-Lubensky model briefly, tounderstand the role of the fourth order gradient term.By setting D‖ = D‖⊥ = κ1 = 0, Eq.(22) is reduced to asimpler form
F = K3
∫q
[C‖q
2‖ +
C⊥ + 2D⊥C + D⊥q2⊥
2C⊥ + 2D⊥q2⊥ + q2
q4⊥
+C⊥ + D⊥q2
⊥
2C⊥ + 2D⊥q2⊥ + q2
q2‖q
2⊥
]|u|2. (23)
The profile of the corresponding layer bending modulus
is depicted in Fig.3. This is identical with the effectiveLandau-de Gennes free energy (7) if D⊥ vanishes. Inthe Landau-de Gennes case, the effective layer bendingelasticity decays to zero in the short wavelength limit, be-cause the layer bending elasticity owes only to the direc-tor splay energy, and the director deformation vanishesas q⊥ → ∞ (20). Now in the Chen-Lubensky model,however, the effective undulation elasticity in the shortwavelength limit is 2D⊥/(2D⊥ + 1), which could be in-terpreted as the layer bending modulus only from thedensity contribution. In fact, the fourth gradient termsin (19) contain the layer bending elastic contributions in-dependent of the director perturbation. The surface ten-sion terms (∇⊥u)2 and ∇⊥u · δn⊥ are cancelled because
O
1
)0()(
κ
κ ^q
^C~~ ^q
2)1~2(
~2+^
^
DD
FIG. 3: Plot of the effective layer undulation modulus κ(q3 =0, q⊥) in (23). Roughly, the Lorenzian-like curve with the
offset (∼ D⊥) decays with the characteristic wave number
∼p
C⊥. The fourth density gradient terms are typicallyquite small than the second order terms.
of the free energy invariance under a rotation around thelayer in-plane axes.
C. Effective Sm-C free energy
Next we calculate the effective free energy for the Sm-C phase. Using the tilt angle condition δF (0)/δn3 =−4
C⊥ + 2D⊥q2
0
((1/N2
3 ) − 1)
/N3 = 0, the perturbedequation of state is given in the matrix form
Mδn⊥ = v, (24a)
M =(
D′q21 + N2
3
(1 + γ2
1
)q2 + 2γ2
1A + κ2Q22 D
′q1q2 + N2
3 γ1γ2q2 + 2γ1γ2A − κ2Q1Q2
D′q1q2 + N2
3 γ1γ2q2 + 2γ1γ2A − κ2Q1Q2 D
′q22 + N2
3
(1 + γ2
2
)q2 + 2γ2
2A + κ2Q21
),
(24b)
v = 2i
(Eγ1 − N3dq1
Eγ2 − N3dq2
)u, (24c)

7
where we use the first order terms of the normalizationcondition δn3 = −γ1δn1−γ2δn2. We also introduced theabbreviations
κ1 ≡ (K1 − K3)/K3, (25a)κ2 ≡ (K2 − K3)/K3, (25b)
A ≡ C‖ + 4D⊥q20 + 2D‖⊥q2
0
((1/N2
3 ) − 1), (25c)
E ≡ 4D⊥q20q3
N3− AN · q, (25d)
D′≡ N2
3
(2D⊥ + κ1
), (25e)
qi ≡ qi − γiq3 (i = 1, 2), (26a)
Qi ≡ qi − NiN · q (i = 1, 2), (26b)
d ≡ D‖⊥ (N · q)2 + D⊥ (N × q)2 . (26c)
The reduced Frank elastic constant κ1 is found in theequation of state (24a) only through the form combinedwith D⊥ (25e). It means that the splay Frank elasticityand the perpendicular fourth order density gradient havea similar layer bending elastic contribution, agreeing withthe Sm-A case (23). The smectic free energy is invariantunder a uniform displacement, and the solution of theequation of state (24a) for q = 0 is N · δn⊥ = δn3 =0. This is nothing but the uniform rotational c-vectorGoldstone mode.
Inverting the matrix M , we obtain the expression forthe director deformation
(δn1
δn2
)=
2iu
DC
(ED
′q2 + 2N3dAγ2
)(γ1q2 − γ2q1) + EN2
3 γ1q2 − N3dq2Q1 − Eκ2Q1Q3 − N3dκ2Q1 (N × q)2(
ED′q1 + 2N3dAγ1
)(γ2q1 − γ1q2) + EN2
3 γ2q2 − N3dq2Q2 − Eκ2Q2Q3 − N3dκ2Q2 (N × q)2
,
(27)
where the determinant of M is given by
DC =(D
′+ N2
3 κ2
)q2 (N × q)2 + D
′κ2 (N × q)4
+2D′A (γ1q2 − γ2q1)
2 + 2Aκ2Q23
+2N2⊥q2A + N2
3 q4. (28)
Now in the Sm-C phase, the director perturbation is notparallel to the deformation wave vector even in the pureundulation case (q3 = 0). So not only the splay Frankelastic energy but also the twist and bend terms havecontributions to the layer bending elastic energy. Thesplay term |q · δn|2 favors the state with q ⊥ δn (we callit the q ⊥ δn state), and both the twist and the bend-ing terms the q ‖ δn state. In such a layered smecticphase with the spontaneously broken layer normal direc-tion and with the rotational c-vector Goldstone mode,the three Frank elastic terms, being originally isotropic,have anisotropic energy contributions, together with themolecular anisotropic fourth order coupling constants.The leading order terms of D‖, D⊥ and D‖⊥ elastic ener-gies are (∇2
‖u)2, (∇2⊥u+∇·n)2 and (∇2
‖u)(∇2⊥u+∇·n),
which favor N ⊥ q, N ‖ q and the intermediate staterespectively (B1a).
Anisotropy due to the c-vector is apparent in the pureundulation case (q3 = 0). Let ϑ be the angle between thec-vector and q⊥. The effective free energy is calculated
with (27) and Appendix C,
F =K3
2
∫q⊥
f =K3
2
∫q⊥
q4⊥|u|2 (κu(x) + κn(q, x)) ,
(29a)
κu(x) =2
N23
D‖N
4⊥x2 + 2D‖⊥N2
⊥x(1 − N2
⊥x)
+D⊥(1 − N2
⊥x)2
, (29b)
κn(q, x) =2Dn1(x)k2
⊥ + 2Dn2(x)N2⊥
Dn3(x)k2⊥ + Dn4(x)N2
⊥, (29c)
Dn1(x) = −2
D⊥ +(D‖⊥ − D⊥
)N2
⊥x2 (
1 − N2⊥x
)×
1 + κ2
(1 − N2
⊥x)
, (29d)
Dn2(x) = x
N2
3 + D′ (
1 − N2⊥x
)−4N2
3
(D⊥ + (D‖⊥ − D⊥)N2
⊥x)
×1 + κ2
(1 − N2
⊥x)
,
−4
D⊥ +(D‖⊥ − D⊥
)N2
⊥x2
(1 − x) , (29e)
Dn3(x) =
N23 + D
′ (1 − N2
⊥x)
1 + κ2
(1 − N2
⊥x)
,
(29f)
Dn4(x) = 2
D′(1 − x) + κ2N
43 x + N2
3
, (29g)

8
where we define x = cos2 ϑ, and the dimensionless wave-number k⊥ ≡ N3q⊥/
√A is introduced. As pointed out
before, the effective layer bending elasticity contains thetwo components: κu(x) is the density contribution with-out the director deformation, and κn(q⊥, x) comes fromthe director elasticity. The director part has a character-istic length-scale as in the Sm-A case. The characteristicdeformation wave number λ−1
A ≡√
A/N3 consists of thetilt-angle dependent fourth density gradient contribution,as well as the second order gradient contribution (25c).Taking the Landau-de Gennes limit Di → 0 (i =⊥, ‖⊥, ‖)and α → 0, λA is reduced to the parallel penetrationlength λ‖.
D. State diagram for Sm-C phase
In the following, we examine the energetically favoredangle θ between the layer undulation wave vector q⊥ andc-vector.
We first consider the one Frank constant case: K1 =K2 = K3. In this case, the calculation and evaluationof the free energy become quite simple with no otherapproximation. The free energy (29a) is
D⊥N23
q4⊥|u|2
f = 2N4⊥
(D‖D⊥ − D2
‖⊥
)x2 + D⊥
(1 − N2
⊥x)
+ 2D‖⊥N2⊥x
−
(2N2
⊥ + k2⊥
) (−2N4
⊥D2‖⊥x2 + D⊥
(1 − N2
⊥x)
+ 2D‖⊥N2⊥x
)− 2N2
3 N2⊥D⊥x
2k2⊥D⊥ (1 − N2
⊥x) + 4D⊥N2⊥ (1 − x) + 2N2
⊥ + k2⊥
(30)
One can show that the free energy is a convex function of x throughout 0 ≤ x ≤ 1.
N23 D⊥
4N4⊥q4
⊥|u|2f
′′(x) = D‖D⊥ − D2
‖⊥ +2AN2
⊥ + N23 q2
⊥(1 + 2D⊥
)(2N2
⊥ + k2⊥) − 2N2
⊥D⊥ (k2⊥ + 2) x
3
×(
1 + 2D⊥
) (2N2
⊥ + k2⊥
)D‖⊥ −
(k2⊥ + 2
)D⊥
2
, (31)
because a stability of the smectic layer requires the in-equality det(D) ≡ D‖D⊥ − D2
‖⊥ > 0 (see Appendix D),
and(1 + 2D⊥
) (2N2
⊥ + k2⊥
)> 2D⊥N2
⊥(2 + k2
⊥). Thus
the behavior of the free energy minimum is determinedonly by f
′(0), f
′(1) and det(D).
N23
2N2⊥q4
⊥|u|2f
′(0) =
2(k2⊥ + 2N2
⊥) (
D‖⊥ − D⊥ + 2D⊥D‖⊥ − D2⊥
)+ N2
3(1 + 2D⊥
)2
(2N2⊥ + k2
⊥), (32a)
D⊥N23
N2⊥q4
⊥|u|2f
′(1) = 2D‖⊥ − D⊥ + 4N2
⊥
(D‖D⊥ − D2
‖⊥
)−
D2‖⊥
(2N2
⊥ + k2⊥
)D⊥ (2 + k2
⊥)
+
(2N2
⊥ + k2⊥
) (1 + 2D⊥
) (2N2
⊥ + k2⊥
)D‖⊥ −
(2 + k2
⊥)D⊥
2
D⊥ (2 + k2⊥)
(1 + 2D⊥
)(2N2
⊥ + k2⊥) − 2N2
⊥ (2 + k2⊥) D⊥
2 .
(32b)

9
We note that the dimensionless wave-number k⊥ ≡N3q⊥/
√A is a function of D‖⊥ and D⊥. There are three
possible cases for the first derivative f′(x):
(i) f′(0) > 0 (so f
′(1) > 0)
The minimum of the free energy is at θ = 90(ii) f
′(0) < 0 and f
′(1) > 0
The favored angle θ exists between 0 and 90.(iii) f
′(0) < 0 and f
′(1) < 0.
The free energy minimum is at θ = 0, and the directortends to be aligned to the layer bending direction.
The three-dimensional state diagrams for D‖, D‖⊥ andD⊥ with different q⊥s are given in Fig.4 and Fig.5. Thefixed parameters are set to be typical values and usedin followings if not specified: the inversed layer widthq⊥ = 2 × 107cm−1 and the reduced parallel layer com-pression modulus C‖ = 4 × 1012cm−2, being of orderof the inversed parallel penetration length λ−2
‖ [18, 44].
We limit the possible parameter range of
Di
to 0 <
Di < 1.0 (i =‖, ‖⊥,⊥), because of the free energy stabil-ity, the relation D⊥ ∼ d2/(λ⊥N⊥)2, and the feasibilityof the Landau-de Gennes model (Di = 0) in the Sm-Aphase. In fact, one of the scattering experiments showsthat D‖⊥, D‖ ' 0 and D⊥(∼ 10−4) ¿ 1 [15], where onlythe trivial θ = 90 state is expected to be observed asthe previous work implies [34, 45]. However, dependingon the material, one could obtain a wide range of theparameter sets within 0 < Di . 1.0. State boundariesare determined by the first derivative of the free energyconditions (1) f
′(0) = 0, (2) f
′(1) = 0, and the stability
plane (3) det(D) = 0, where each number corresponds tothe number of the planes in Fig.4 and Fig.5. The threedomains (i), (ii) and (iii) can be identified with the signsof f
′(0) and f
′(1) when D‖⊥ = D‖ = 0 and D⊥ → +0.
Before entering discussions, we again note that thesmectic layer elasticity consists of the density and theFrank elastic energies and the coupling energy betweenthe layer normal and the director. We shall explain allthe following results with the combination of the threeelastic contributions above.
For any tilt angle α, the state diagrams for q⊥ ≤ 2 ×106cm−1 are roughly independent of q⊥, and are quitedifferent from that of q⊥ = 2× 107cm−1. This is becausethe characteristic wave number λ−1
A ∼ 106−7cm−1, sothe squared dimensionless wave number k2
⊥ in (32a) and(32b) is negligible for the wavelength corresponding toq⊥ . 2 × 106cm−1. The state diagram in the limit ofα → 0 at any q⊥ is identical with the figure for α = 10and q⊥ = 2×106cm−1 (Fig.4(a)). In this case, the planes(1) and (2) are outside the practical parameter rangeof
Di
, and the stable angle is θ = 90 everywhere.
Thus the preferred undulation wave vector q⊥ is alwaysperpendicular to the c-vector in the small director tiltof the Sm-C phase, as expected in [45]. For α = 10,on the other hand, the topology of the state diagramis different at the short wavelength q⊥ = 2 × 107cm−1.
(a) α = 10, q⊥ = 2 × 106cm−1 (b) α = 10, q⊥ = 2 × 107cm−1
^D~
^||~D
||~D
O
0.1
0.1
0.1
(3)
o90=θ
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θ
oo 900 <<θ
(c) α = 20, q⊥ = 2 × 106cm−1 (d) α = 20, q⊥ = 2 × 107cm−1
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θ
oo 900 <<θ
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θoo 900 <<θ
(e) α = 30, q⊥ = 2 × 106cm−1 (f) α = 30, q⊥ = 2 × 107cm−1
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θoo 900 <<θ
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θoo 900 <<θ
(2)
FIG. 4: State diagrams with the reduced constants D⊥, D‖⊥
and D‖ for α ≤ 30 in the one Frank constant approxima-tion K1 = K2 = K3. We use the inversed layer periodq0 = 2 × 107cm−2 and the reduced parallel layer compres-
sion elastic constant C‖ = 4 × 1012cm−1“
∼ λ−2‖
”
as a set of
typical values [18, 44]. The first derivative planes f′(0) = 0,
f′(1) = 0 and the stability plane det(D) = D⊥D‖ − D2
‖⊥ = 0are donated by the plane (1), (2) and (3) respectively. The
planes (2) in (a)-(e) appear in the region D‖⊥ > 1, outside
the possible parameter range, so that f′(1) > 0 everywhere
in the state diagrams except for (f).

10
(a) α = 40, q⊥ = 2 × 106cm−1 (b) α = 40, q⊥ = 2 × 107cm−1
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θoo 900 <<θ
(2)
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)
(3)
o90=θoo 900 <<θ
(2)
(c) α = 50, q⊥ = 2 × 106cm−1 (d) α = 50, q⊥ = 2 × 107cm−1
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)(3)
o90=θoo 900 <<θ
(2)
(2)(3) o0=θ
^D~
^||~D
||~D
O
0.1
0.1
0.1
(1)(3)
o90=θoo 900 <<θ
(2)
(2)(3) o0=θ
FIG. 5: State diagrams for α = 40 and 50. The fixedparameter q0 and C‖ are the same values as in Fig.4. Atα = 40, the plane (2) approaches the stability plane (3)as the deformation wave number q⊥ grows. At α = 50 ifpossible, the plane (2) enters the stable region det(D) > 0,and a θ = 0 domain emerges.
The plane (1) enters the possible range 0 < D⊥ < 1and the nontrivial 0 < θ < 90 state could be stable.However, this stable 0 < θ < 90 domain is realized bycomparatively large value of D⊥, and with deformationwave number almost atomic scale, so that 0 < θ < 90might be difficult to be achieved in a practical situationwith α = 10. For α ≥ 20, the plane (1) is always insidethe domain 0 < Di < 1 even in the long wavelengthlimit q⊥ → 0, as proved with (32a). The q⊥ ∼ λ−1
Acrossover at α = 30 now involves the entrance of theplane (2), while the θ = 0 state is unstable because ofthe negative det(D). At α = 40, the plane (2) intersectsthe plane (1) and approaches the stability plane (3) asq⊥ increases. However the θ = 0 state is yet to be stablesince the plane (2) does not cross the plane of stability(3). In experiment, the largest tilt angle α that has beenreported to our knowledge is 37 [46]. So the possiblestable θ state might be limited to 0 < θ ≤ 90, as wesee from the diagrams for α ≤ 40. Nevertheless, if theα = 50 molecular tilt can be achieved, there exists thestable θ = 0 state, which is slightly more favorable forlarger q⊥.
In each state diagram, the behavior of the preferredangle θ is quite sensitive to D⊥ compared with the otherfourth density gradient term coefficients D‖⊥ and D‖.This is because the elasticity of the c-vector, being almostthe same as c-vector, is dominated by the elastic termswith D⊥, as we see in the previous subsection. The ratiobetween C⊥ and D⊥ is uniquely determined by the tiltangle α (see (13)), and the value of the D⊥ controls thepreference of q⊥ ‖ N . Thus the stable angle θ changesfrom θ = 90 to 0 < θ < 90 and θ = 0 as D⊥ grows.The D‖⊥ and D‖ dependence are weaker than that ofD⊥, but their dependence can be confirmed in Fig.4 andFig.5. In Fig.5(c) and Fig.5(d), the θ = 0 state transitsto the 0 < θ < 90 state with the increment of D‖. Thestate behavior at each tilt angle α becomes more diversefor the shorter wavelengths. Inspection of (23) and (29a)shows that the layer bending elasticity has both the den-sity terms (∇2
‖u)2, (∇2⊥u)2 and (∇2
‖u)(∇2⊥u)2, and the
Frank elastic contribution. The ratio of the director elas-tic contribution is controlled by the m-n locking (19).However, the director cannot be locked to the smecticlayer with the spatial deformation scale smaller than thedirector coherent length λi (i =‖,⊥), being of the sameorder as λA. In such a deformation scale, the isotropicFrank elastic contribution to the layer elasticity becomesweak, and the anisotropic density contribution is rela-tively large. This anisotropy is generated and enhancedby the c-vector. Therefore the tilt angle dependence ofthe phase behavior is remarkable, In fact, the nontrivialstate 0 < θ < 90 and θ = 0 appears at higher α.
We next consider the case for arbitrary Frank constantsintroducing a few approximations for the free energy. Weexpand the free energy in terms of y ≡ N2
⊥x because thedirector tilt angle against the layer normal is reported tobe less than about 40 [46]. In the long wavelength limitq → 0, (29a) is reduced to
N23
2q4⊥|u|2
f = β0 + β1y + β2y2, (33a)
β0 = D⊥, (33b)
β1 = 2D‖⊥ +N2
3 (1 + κ2)N2
⊥
−2D⊥
1 +
2N23 (1 + κ2)
N2⊥ (1 + κ1)
, (33c)
β2 = D⊥ + D‖ − 2D‖⊥ +N2
3
2N2⊥ (1 + κ1)
×
[(1 + κ2)
κ1
(1 + N2
3
)− 2κ2N
23
N2
⊥
−κ2 (1 + κ1)
+2D⊥ (1 + κ2)N2
⊥ (1 + κ1)(2 − 3κ1 + 6κ2N
23
)+2D⊥ (1 + 3κ2) − 4D‖⊥ (1 + κ2)
],(33d)

11
where we neglect the higher order terms of Di ∼d2/ (N⊥λi)
2 (i =‖, ‖⊥, ⊥). The typical values of themolecular length d and the penetration length λi are 30Aand ≥ 200A respectively [18, 44]. Assuming the smalltilt N2
⊥ ¿ N23 and the small density elastic constants
D‖, D‖⊥, D⊥ ¿ 1, the coefficient of the first order termβ1 is positive. It means that the free energy f(y) takesits minimum at y = 0 (ϑ = 90) or y = 1/N2
3 (ϑ = 0).Note that the θ = 90 state is always the minimum aslong as β2 is positive. Otherwise, β2 being negative, thefree energy minimum depends on the each parameter. Ifκ1 = 0, N2
⊥ → 0 and Di → 0, the θ = 0 state gives theminimum for a large κ2 > 0.
We next take the short wavelength limit. Althoughthe assumption for the continuum model is broken downin the q⊥ → ∞ case, the short wavelength behavior isstill useful for a qualitative analysis by comparing withthe long wavelength limit. The small wavelength limit isvery simple:
N23
2q4⊥|u|2
f =(D‖ − 2D‖⊥ + D⊥
)×
(y +
D‖⊥ − D⊥
D‖ − 2D‖⊥ + D⊥
)2
+D‖D⊥ − D2
‖⊥
D‖ − 2D‖⊥ + D⊥. (34)
In some material, D‖⊥ ¿ D‖, D⊥ [15]. In this case, thefree energy is always a convex function of y, and takes itsminimum at θ = 0 or 0 < θ < 90 depending on the tiltangle α. Crossover of the long and the short wavelengthbehavior occurs at q⊥ ∼ λ−1
A , from the inspection of theeffective layer elastic energy (29a).
Next we present the numerical diagrams for the pre-ferred angle θ based on the non-approximated free en-ergy (29a) to discuss the detailed state behavior. Typicalstate diagrams in terms of D⊥ and D‖ is shown in Fig.6.According to the experiment [15], the coupling constantD‖⊥ is expected to be small, so we set it to 0.01, compar-ing with the parameter range 0 < Di . 1 (i =‖, ⊥). Theother parameters are α = 30, q⊥ = 2 × 105cm−1 andκ1 = κ2 = 0. The higher sensitivity of the state diagramon D⊥ than that of D‖ is consistent with Fig.4 and Fig.5.
In the following, we discuss the dependence on thetilt angle α, the undulation wavelength q⊥, the densityelastic constants and the Frank moduli. The undulationlength scale dependence is depicted in Fig.7. Both thestate boundaries and the contour lines are almost thesame for q⊥ ≤ 2 × 106cm−1. At q⊥ = 2 × 107cm−1,the contour lines move to lower D⊥, and the lower pre-ferred angle θ ≤ 45 state is stable within the possi-ble parameter range of Di (i =‖, ⊥). The crossoveraround q⊥ ∼ 106−7cm−1 agrees with Fig.4 and Fig.5.Fig.8 is the tilt angle dependence of the state diagram.The behavior of the state boundary is again in accor-dance with Fig.4 and Fig.5. At α = 40 and 50, there
appears the stable lower-θ domains before the crossoverq⊥ = 2 × 105cm−1 ¿ λ−1
A . However, the θ = 0 domainis not in the possible parameter space of D⊥ and D‖.With higher value of D⊥, much lower θ state becomesstable. As the α increases, the contour lines approachthe D⊥ = 0 line gradually, not abruptly around the cer-tain value like the undulation wave number q⊥. Absenceof the characteristic tilt angle is obvious with inspectionof the dimensionless state boundary conditions (32a) and(32b).
Next we study the dependence on the ratios betweenthe Frank constants. Fig.9 gives the state diagrams forK1/K3 and K2/K3 being 1/2 and 2. The dependenceon κ1 is much smaller than that on κ2. This can beexplained as follows. Vanishing splay energy ∇ · δn = 0,being satisfied with q⊥ ⊥ δn, can be achieved at anyϑ: once the two vectors N and q⊥ are given, one canalways take δn compatible with N ⊥ δn and δn ⊥ q⊥,while vanishing the twist energy N ·(q⊥ × δn) = 0, beingequivalent to vanishing the volume of the parallelepipedof N , q⊥ and δn, can be achieved only if q⊥ ⊥ N orq⊥ ‖ δn. Thus the small κ1 and large κ2 dependence areexhibited in the state diagrams. We discuss the effect ofκ1 and κ2 on the energetically favored angle θ further inthe next paragraph.
The state diagram for the reduced Frank elastic mod-uli κ1 and κ2 is also calculated. Fig.10 is a typical statediagram. The density layer bending elastic constants areset to be D⊥ = 0.5, D‖⊥ = 0.01 and D‖ = 0.1. Anexperiment result tells that D‖⊥ is small [15]. We setD⊥ ' 0.5, being about on the state boundary of θ = 90or less, so that we would obtain the sensitive state behav-ior. This parameter set will be used in the following ifnot specified. In Fig.10, the θ = 90 state dominates andthe small 0 < θ < 90 domain lies at small κ2 except forκ1 → −1. The effect of κ2 is quite simple. Stability ofthe twist term favors q⊥ ‖ N or q⊥ ‖ δn, being equiv-alent to the θ = 0 or θ = 90 respectively. Therefore,for small α, the θ = 90 state is stable due to the q⊥-δnlocking term as in the Sm-A phase. The previous statediagrams Fig.9 also show this behavior. Next we moveon to the κ1 dependence. For small α, the q⊥-δn lock-ing term set q⊥ ‖ δn as in the Sm-A phase. Thus thesplay Frank elastic energy clearly favors larger θ, sincethe splay deformation owes to the director componentprojected along the deformation vector q⊥ (see Fig.18,and the detailed calculation is found in Appendix E).This energetic preference accounts for the growth of theθ = 90 domain at small α and large κ1, but this κ1 de-pendence is small due to the splay energy is proportionalto α2 at small tilt angle, agreeing with Fig.10. On theother hand, at low κ1, the splay elasticity is weaken andthe twist and bend terms become dominant relatively.Stabilizing the twist term and the q⊥-δn locking termrequires θ = 90 at small α. This is again consistent withFig.10, and the two kinds of the state diagrams Fig.9 andFig.10 are compatible each other. The undulation scale

12
α = 30, q⊥ = 2 × 105cm−1,
D‖⊥ = 0.01, κ1 = κ2 = 0
(deg) 90
75 60 45 30 15
0 0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
FIG. 6: Typical state diagram in terms of D⊥ and D‖. A
set of parameters is D‖⊥ = 0.01, κ1 = κ2 = 0, α = 30 and
q⊥ = 2 × 105cm−1. The preferred angle can be less than 45
depending on the density elastic constant. We use the sameline style in the following state diagrams. All the followingfigures obey the legend.
(a) q⊥ = 2 × 104cm−1 (b) q⊥ = 2 × 106cm−1
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
(c) q⊥ = 2 × 107cm−1
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
FIG. 7: The wavelength dependence of the preferred angle.Not only the state boundaries but the contour lines hold al-most the same positions for q⊥ ≤ 2 × 106cm−1 and changeabruptly at q⊥ = 2×107cm−1, agreeing with Fig.4 and Fig.5.The parameter set is the same as in Fig.6 except for q⊥.
(a) α = 20 (b) α = 40
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~Do90=θ
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
(c) α = 50
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
FIG. 8: The tilt angle dependence of the state behavior. Thecontour lines gradually move to the lower D⊥ region as αincreases. The parameter set is the same as in Fig.6 exceptfor α. The θ = 0 domain does not appear even at α = 50.The stable θ = 0 state emerges with higher D‖⊥.
(a) κ1 = −0.5, κ2 = 0 (b) κ1 = 1, κ2 = 0(K1/K3 = 0.5, K2/K3 = 1) (K1/K3 = 2, K2/K3 = 1)
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
(c) κ1 = 0, κ2 = −0.5 (d) κ1 = 0, κ2 = 1(K1/K3 = 1, K2/K3 = 0.5) (K1/K3 = 1, K2/K3 = 2)
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
0 0.2 0.4 0.6 0.8 1 0
0.2
0.4
0.6
0.8
1
^D~
||~D
FIG. 9: State diagram of the preferred angle with differentratios of the Frank elastic moduli. The twist κ2 dependenceis larger than the splay κ1 dependence. The contour linesmove to the large D⊥ region with κ1 geting away from 0,and/or with the increment of κ2.
dependence is shown in Fig.11. As we have seen before,the state diagrams for lower wave number q⊥ ≤ λ−1
A isalmost the same, and changes at q⊥ = 2 × 107cm−1.The density contribution to the effective layer elasticityis dominant at a higher wave number q⊥ ≥ λ−1
A . Thedensity contribution to the layer elasticity favors N ‖ q⊥because D⊥ is larger than the other D‖⊥ and D‖ in thepresent parameter set. Thus the low preferred angle be-comes more favorable as the undulation scale q−1
⊥ be-comes smaller than the characteristic length scale λA. Infact, the lower θ domain shrinks with the smaller value ofD⊥ = 0.2 (Fig.11(c)). In the q⊥ = 2× 107cm−1 state di-agram (Fig.11(b)), the 0 < θ < 90 domain grows mostextensively at κ1 ' 0. This is because the stability ofthe θ < 90 state is suppressed at larger and smaller κ1
as mentioned above. Finally, Fig.12 shows the tilt angledependence of the κ1-κ2 state diagram. Stable θ = 90state at κ1, κ2 → −1 for high α is due to the dominantbend Frank elastic contribution. Minimizing the bendterm |N × (q⊥ × δn)|2 = |δn|2 |N · q⊥|
2 reads N ⊥ q⊥,so that the θ = 90 state is favored both at small andlarge α. Around κ1 = 0, the lower θ domain is enlargedat a higher tilt angle (α & 40). The mechanism is basi-cally the same as one at q⊥ = 2 × 107cm−1 (Fig.11(b)),and the D⊥ elasticity is also enhanced by the growth ofthe molecular tilt angle and the c-vector (Fig.2). Thiseffect accounts the larger domain of the 0 ≤ θ < 90state (Fig.12), while such nontrivial wide domain doesnot appear with lower D⊥ (Fig.12(d)). In this way thelow θ domain is extended to the higher twist elasticityκ2. However, in the twist dominant case, the possible

13
α = 30, q⊥ = 2 × 105cm−1,
D⊥ = 0.5, D‖⊥ = 0.01, D‖ = 0.1
0 2 4 6 8 10
0
2
4 6
8
10
1~κ
2~κo90=θ
FIG. 10: State diagrams in terms of the reduced Frank elasticconstants κ1 and κ2. The small κ1 dependence and the largeκ2 effect are clear. The θ = 90 state is dominant except forsmall twist κ2.
(a) q⊥ = 2 × 106cm−1 (b) q⊥ = 2 × 107cm−1
0 2 4 6 8 10
0
2
4 6
8
10
1~κ
2~κ
0 2 4 6 8 10
0
2
4 6
8
10
1~κ
2~κ
(c) q⊥ = 2 × 107cm−1, D⊥ = 0.2
0 2 4 6 8 10
0 2 4 6 8 10
1~κ
2~κ
FIG. 11: State diagrams in terms of the reduced Frank elasticconstants κ1 and κ2 with different undulation wave-numbers.While the state behavior with the narrow 0 < θ < 90
domain has little change for q⊥ ≤ 2 × 106cm−1, the large0 < θ < 90 domain appears at q⊥ = 2× 107cm−1. The plotfor q⊥ = 2 × 107cm−1 with lower D⊥ is depicted in (c).
(a) α = 20 (b) α = 40
0 2 4 6 8 10
0
2
4 6
8
10
1~κ
2~κo90=θ
0 2 4 6 8 10
0
2
4 6
8
10
1~κ
2~κ
(c) α = 50 (d) α = 50, D⊥ = 0.2
0 2 4 6 8 10 0 2 4 6 8 10
1~κ
2~κo90=θ
o90=θ
o0=θ
oo 900 <<θ
0 2 4 6 8 10
0 2 4 6 8 10
1~κ
2~κ
FIG. 12: State diagrams in terms of the reduced Frank elasticconstants κ1 and κ2 with different tilt angles. The qualitativestate behavior is the same at the small tilt angle α ≤ 30.The narrow 0 < θ < 90 domain gradually disappears asα → 0. For α = 40, the 0 < θ < 90 state minimizes thefree energy even at higher κ2 around κ1 ' 0. For α = 50, astable θ = 0 domain emerges at κ1 ' 0 and higher κ2. Thepreferred angle changes discontinuously only at the θ = 0-θ = 90 state boundaries. The lower D⊥ diagram is plottedin (d).
α = 30, q⊥ = 2 × 105cm−1,
D⊥ = 0.5, D‖⊥ = 0.01, D‖ = 0.1κ1 = κ2 = 0
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
FIG. 13: Plot of the free energy f(ϑ) as a function of theangle between the c-vector and the undulation wave-numbervector. The plot is normalized by f(ϑ = 0).
(a) q⊥ = 2 × 106cm−1 (b) q⊥ = 2 × 107cm−1
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
FIG. 14: Plots of the free energy for different wave numbers.For q⊥ ≤ 2 × 106cm−1 the free energy takes its minimum atϑ = 90 and the difference of the maximum and the mini-mum is in the same order of the free energy itself, while thepreferred angle at q⊥ = 2× 107cm−1 lies in 0 < θ < 90 andthe energy barrier is a few percent.
(a) α = 20 (b) α = 40
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
(c) α = 50
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
FIG. 15: The tilt angle dependence of the free energy f(ϑ).The value at ϑ = 90 becomes relatively high and the pre-ferred angle decreases as the tilt angle increases.
two twist minima q⊥ ‖ N and q⊥ ‖ δn are incompatiblewith each other because of the normalization conditionN · δn = 0, so, as κ2 increases, the 0 < θ < 90 statebecomes definitely split into the two extremes θ = 0 andθ = 90 states, and the transition between θ = 0 andθ = 90 states is discontinuous, which is consistent with

14
(a) κ1 = −0.5, κ2 = 0 (b) κ1 = 1, κ2 = 0(K1/K3 = 0.5, K2/K3 = 1) (K1/K3 = 2, K2/K3 = 1)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
(c) κ1 = 0, κ2 = −0.5 (d) κ1 = 0, κ2 = 1(K1/K3 = 1, K2/K3 = 0.5) (K1/K3 = 1, K2/K3 = 2)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
FIG. 16: Plots of f(ϑ) for different Frank constants. The en-ergy barrier increases with the growth of κ1, and the preferredangle decreases continuously with the decline of κ2.
(a) α = 40, κ1 = 0, κ2 = −0.5 (b) α = 50, κ1 = 0, κ2 = 6(K1/K3 = 1, K2/K3 = 0.5) (K1/K3 = 1, K2/K3 = 7)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
0 0.2 0.4 0.6 0.8
1 1.2
0 30 60 90
F(ϑ
)/F
(ϑ=
0)
ϑ (deg.)
FIG. 17: Plot of the free energy (a) with the combination ofthe lower θ conditions, and (b) with the discontinuous θ tran-sition. (a) The free energy barrier can be enhanced by themultiple lower θ conditions. (b) The preferred angle is deter-mined by the comparison with the two local minima f(ϑ = 0)and f(ϑ = 90).
(a) ϑ = 0 (b) ϑ = 90
z
x
z
x
FIG. 18: Layer undulation and the director configuration as-suming the nonzero constant tilt angle α between m and n.The splay Frank elastic energy costs at ϑ = 0 more than atϑ = 90, because of the director component projected to thezx-plane.
Fig.12(c). Conversely, for small κ2, the stability of theintermediate state with 0 < θ < 90 becomes large.
We also present the plots of the free energy f(ϑ). Atypical behavior of the free energy is shown in Fig.13.The normalization is taken with the value at ϑ = 0. Thedifference between the maximum and minimum is of thesame order as the free energy itself. Thus the θ = 90state is certainly preferred under the thermal fluctua-tion and the small external field. The undulation wavenumber dependence is plotted in Fig.14. As discussedpreviously, the ϑ dependence of the free energy is notchanged for q⊥ ≤ 2 × 106cm−1, and the ϑ = 90 stateis indeed stable. At q⊥ = 2 × 107cm−1, on the otherhand, the stable state is turned into 0 < θ < 90. Theincrement of f(90) is because of the density elasticityterm with D⊥. However, the energy barrier is a few per-cent of the absolute value. So the free energy minimummight be disturbed by the internal thermal noise and anexternal force. The tilt angle dependence is depicted inFig.15. The minimum θ decreases as the tilt angle grows.The free energy barrier is again small for α = 40, butthe stability of the preferred angle is large at higher tiltangle (Fig.15(c)). The density contribution to the layerbending rigidity with D⊥ again increases f(90). Thefree energy behavior is changed also with the differentFrank constants (Fig.16). The energy barrier grows asthe splay Frank elastic term is dominant. This is be-cause the splay energy stabilizes the θ = 90 state at asmall tilt angle α, as we have seen above. The preferredangle slightly declines with decrease of the twist Frankconstant, agreeing with the previous state diagram Fig.9.Finally, we present some interesting free energy behaviors(Fig.17). The stability of the lower preferred angle canbe enhanced by the combination of the multiple stablelow θ conditions, compared Fig.17(a) with Fig.15(b) andFig.16(c). The nontrivial state behavior of Fig.12(c) isunderstood with the plot of the free energy (Fig.17(b)).The discontinuous θ transition is due to the coexistenceof the two local minima.
E. Discussion
We next compare our calculation with the previouswork. Hatwalne and Lubensky [45] derived the elasticfree energy for the smectic-C phase in a more elegantway making use of the symmetry and covariance of themodel free energy. The resulting representation in thecase N = (Nx, 0, Nz) is
F =12
∫q
(Bq2
z + Kxq4x + 2Kxyq2
xq2y + Kyq4
y
)|u|2
(35)

15
We can obtain the layer compression coefficient by settingq1 = q2 = 0 and q3 → 0 in (C3d),
B =2K3
N23
−N2
3
(4D⊥q2
0 − A)
+2
N23
(4D⊥q2
0 − AN23
)2
2A +(2D⊥ + κ1
)N2
3
. (36)
We note that the layer compression elasticity stems fromthe Frank elastic director contribution κ1 as well as thedensity contribution in the smectic-C case (N⊥ 6= 0),because a change of the layer width is associated withthe change of the director tilt against the layer normalsince the director n is not parallel to the layer normal m(see (C1)).
As for the layer bending elasticity, the effectiveChen-Lubensky model (C3d) cannot be written in theHatwalne-Lubensky q2-dyadic form (35), because in gen-eral the anisotropic layer bending elasticity should beexpressed as
F =12
∫q
(Bq2
3 + q4⊥K(ϑ)
)|u|2. (37)
Still we can give some representations for Kx and Ky inthe simple form,
Kx = K(ϑ = 0) =2K3D⊥ (κ1 + 1)
N23
(2D⊥ + κ1 + 1
) , (38a)
Ky = K(ϑ = 90) =K3
N23
2D‖N
4⊥ + N2
3
(1 + κ1N
23
).
(38b)
The two elastic constants contain both the density andthe director contributions as pointed out in the previousresearches [45].
We conclude this section comparing the above resultsfor smectic-C liquid crystals with other layer formingmaterials. Diblock copolymers, chemically connectingtwo different homopolymers, do not possess the definitemolecular orientational degree of freedom especially inthe weak segregation regime [27, 29]. The same speciesaggregate locally due to the entropic and/or enthalpicattraction, while in the long range scale, the entropic re-pulsive interaction arises because of the polymer chainlength. These two interaction accounts the various si-multaneous spatial structures in mesoscale, includingthe lamellae, the hexagonal cylinders, and the sphericalcubes. The free energy of A/B-diblock copolymer is
F =∫
dr
[τ
2ψ2 +
g
4ψ4 +
C
2|ψ|2
]+
α
2
∫∫drdr
′[G(r, r
′)(ψ(r) − ψ)(ψ(r
′) − ψ)
],
(39)
where the order parameter ψ is the density differencebetween A species and B species, and its spatial averageis denoted by ψ. The dimensionless temperature τ ∝(T −Tc)/Tc and g describes the degree of the A/B phaseseparation, and the local and long-range entropic elasticcoefficients are C and α respectively. The kernel of thelong-range part is defined by ∇2G(r, r
′) = −δ(3)(r−r
′).
Inserting the density profile ψ(r) = A cos q(z−u(r)), weobtain the effective layer elastic energy as a functional ofthe layer displacement field u(r) [47]
F =|τ |C3g
∫dr
[4q2
c
(∇‖u
)2 +(∇2u
)2], (40)
where the effective dimensionless temperature τ =τ + 2
√Cα, the inversed layer width qc = 4
√α/C,
and the temperature-dependent density amplitude A =2√|τ |/3g. The higher harmonic terms are neglected.
Thus the anisotropic elasticity should not occur. Onthe other hand, in surfactant systems, the liner am-phiphilic molecule is basically normal to the surfactantlayer [28, 48]. This is similar to the smectic-A phase ofliquid crystals rather than the smectic-C phase. Thusamphiphilic system without the c-vector again does nothave an in-plane anisotropic coupling. However in somecases the surfactant molecules may be aligned at a cer-tain nonzero tilt angle against the layer normal [49–51].Such systems might have an anisotropic layer elasticityas in the present smectic-C liquid crystal case.
IV. HYDRODYNAMICS OF SMECTIC-CLAYERS
In this section, we consider the transverse wave prop-agation in the liquid crystalline smectic layers which os-cillate in the layer normal direction, and travels perpen-dicular to the layer normal. The wave frequency is muchlower than the molecular time scale (∼ 108Hz), so thatthe permeation effect which changes the layer width isnegligible [1]. Also we could perform contractions of somefast relaxed degrees of freedom, namely the density ρ, thelocal energy ε, the velocity along the layer in-plane direc-tions, the pressure P , and the c-vector Ω in this timescale ∼ 10−4s.
According to the unified hydrodynamic description [1,30], a set of the hydrodynamic equations in the constanttemperature with no external field is
∇ · v = 0, (41a)∂u
∂t− vz = 0, (41b)
−Bzβγ∂γvβ = −νhz, (41c)
ρ0∂vz
∂t= −δF
δu− Bzzβ∂βhz + ηzβγδ∂γ∂δvβ ,
(41d)
where hz is the torque acting on the c-vector and Bαβγ
is the coupling constant between the torque and the ve-

16
TABLE II: Parameters and their typical scales in the dynamic equation (44) [1, 46, 52, 53].
parameter description typical scale
ρ0 averaged molecular density ∼ 1g/cm3
u(r) layer displacement field ∼ 10−7 − 10−8cmµ0 isotropic viscosity ∼ 1Poiseµ1 rotational viscosity ∼ 1Poiseqi undulation wave number ∼ 10−5cmω undulation frequency ∼ 104HzB = CiΨ
20q
20 (i =⊥, ‖) layer compression elastic constant ∼ 106dyn/cm2
(second order density elastic constant)DiΨ
20q
20 (i =⊥,⊥‖, ‖) layer bending elastic constant ∼ 10−6dyn
(fourth order density elastic constant)Ki (i = 1, 2, 3) Frank elastic modulus ∼ 10−6dyn
locity. The first equation is the incompressibility con-dition originated from the equation of continuity. Thesecond and third equation are the relaxation equation ofthe layer permeation and the rotational c-vector moderespectively. The last equation is derived consideringthe momentum conservation essentially equivalent to theNavier-Stokes equation. We write the reduced equationof motion as
ρ0∂2u
∂t2= µβγ∂β∂γ
∂u
∂t− δF
δu. (42)
In the smectic-C phase, the model free energy has thestatic elastic coupling of the layer displacement field uand c-vector as mentioned in Sec.III. Now there exists thedynamical viscous coupling of the velocity and the molec-ular orientation in the second term of (42). Anisotropicviscosity tensor µβγ (β, γ=1, 2) indeed depends on thec-vector. It is straight forward to speculate the form ofµβγ ,
µβγ = µ0 δβγ + µ1nβnγ , (43)
where µ0 and µ1 are the isotropic and ”pure” anisotropicviscosities respectively. The isotropic and rotationalviscosities are reported to be of the same order (∼1Poise) in the experimental studies [46, 52]. In the
smectic-A limit, it is reduced to one independent in-plane isotropic viscosity µβγ = µ0 δβγ = ηzβγz. Wethen add the oscillatory source term s(r, t). We con-sider the oscillating wall and cylindrical sources s(r, t) =s0 cos(ωt)δ(x) and s0 cos(ωt)δ(x)δ(y) respectively, to ex-amine the anisotropy in the Sm-C phase. This vibratingforce could be anything including the oscillatory objectand the electric field. In the former case, the directoris assumed to be aligned in parallel to the source in-terface. The linear approximated dynamic equation inFourier space is
ρ0∂2u
∂t2= −
[(µ0 δβγ + µ1NβNγ)qβqγ
∂
∂t
+(Bq2
‖ + K(ϑ)q4⊥
)]u + s(q, t), (44)
where the one dimensional wall and two dimensionalcylindrical source term s(q, t) = 4π2s0 cos(ωt)δ(2)(q⊥)and 2πs0 cos(ωt)δ(qz). The thermodynamic force δF/δu∗
is essentially written in the linear form L(q)u =(Bq2
‖ + K(ϑ)q4⊥
)u.
We next derive the nondimensionalized dynamic equa-tion. The characteristic parameter set is listed in TableII.
The reduced dynamic equation is
ρ0ξ4
K3τ2
∂2u
∂t2= −ξ2ηc
K3τ
(η0q
2 + η1 (N · q)2) ∂u
∂t
−(
B0
K3q20
Bq2z + K(ϑ)q4
)u +
sξ4q0
K3, (45)
where the nondimensionalization is taken with t = τ t,ωτ = ω, uq0 = u, qiξ = qi, ηi = ηcηi (i = 0, 1), B = B0B
and K(ϑ) = K3K(ϑ). All the nondimensional constantsare of order ∼ 1. We set the characteristic scales accord-ing to Table II: τ = 10−4s, ξ = 10−5cm, ηc = 1Poise andB0 = 106dyn/cm2. In this parameter set, the scale of
each term in (45) is ρ0ξ4/K3τ
2 ∼ 10−6, ξ2ηc/K3τ = 1,and B0/K3q
20 ∼ 1. Thus the inertia term can be ne-
glected and the final form of the dimensionless dynamicequation is
ζ∂u
∂t+ L(q)u = s, (46)
where the effective viscosity ζ = q2(η0 + η1 cos2 ϑ
),
and the normalized external force s is given bys = s0(q) cos(ωt). The reduced amplitude s0 is4π2s0q0ξ
4δ(qy)δ(qz)/K3 and 2πs0q0ξ4δ(qz)/K3 in the os-
cillatory wall and the vibrating cylinder case respectively.

17
The solution of the time evolution is
u(q, t) =A
ζ(λ2 + ω2
) (λ cos ωt + ω sin ωt − λ exp λt
),
(47)
where the Lyapunov exponent λ = L/ζ and the initialcondition is set to be u(q, 0) = 0.
Visualization of the wave propagation is depicted inFig.19, Fig.20 and Fig.21. Unphysical infinite wavelengthmode is excluded. We use the parameter set: C‖ = 4 ×1012cm−2, D⊥ = D‖⊥ = D‖ = 0.1, κ1 = κ2 = 0, ω =5 × 104Hz, and α = 30. The reference c-vector tiltsagainst the x-axis at 40. The same parameter set is usedin the following if not specified. The layer displacementis shown with the brightness, and the director changeis indicated with the unit arrow. The dumped directordegree of freedom is governed by the layer displacementfield through (27). While the layer displacement scaleis ∼ 10−7cm−1, the director orientation angle is about10−3−10−4rad, which can be observed in experiment [54,55].
In Fig.19, the director reorientates in the planar oscil-lation. The director change is so small that the energeticpreference at θ = 90 is not clear because of the topologi-cal constraint of the one-dimensional vibrating source.
Anisotropic wave propagation is obvious under a twodimensional cylindrical source (Fig.20). The favored an-gle θ = 90 is confirmed. This agrees with the experi-mental study [34], and the free energy analysis (Fig.4).The wave velocity is faster in the rigid direction c ‖ q⊥,than in the soft orientation c ⊥ q⊥. The anisotropiclayer displacement wave travels in the micrometer scalewith the present parameters, which is indeed expectedto be measurable in experiment through the director ori-entation. Finally, we see the dependence of the balanceof the static and dynamic contributions. In Fig.21, thesnapshots with the different anisotropic viscosities are de-picted. The fast and slow propagation velocities differ asη1 increases. However, the small anisotropy exists onlydue to the static coupling (Fig.21(a)).
We conclude this section with the remark that boththe director reorientation and the anisotropic wave prop-agation is strongly affected by the internal tilted directordegree of freedom, and could be observed within the ex-perimental resolution.
V. CONCLUSION
In this paper, we analytically derive the effective gen-eralized Chen-Lubensky model by the adiabatic elimina-tion of the director relaxation. For the smectic-A phase,the director unlocking from the layer normal is confirmedat an undulation wavelength shorter than the director co-herent length. The effective layer bending elastic modu-lus is written as a function of the unlocking angle α, and
(a) t = 1.2 × 10−4s (b) t = 1.8 × 10−4s
x
y
O 40
co
10-4cm
(c) t = 2.4 × 10−4s (d) t = 3.0 × 10−4s
uq0-1 10
FIG. 19: Snapshot of the layer oscillation under a planarsource. The brightness indicates the local layer displacementand the arrow represents the deviation of the director fromthe ground state. The arrow length is set to be unity. We setC‖ = 4 × 1012cm−2, D⊥ = D‖⊥ = D‖ = 0.1, κ1 = κ2 = 0,
ω = 5 × 104Hz, and α = 30.
(a) t = 1.2 × 10−4s (b) t = 1.8 × 10−4s
x
y
O40
co
(c) t = 2.4 × 10−4s (d) t = 3.0 × 10−4s
FIG. 20: Anisotropic wave propagation is shown in the pres-ence of an isotropic oscillatory source. The wave front is el-liptic with the long axis parallel to the reference director c.
decays with the increment of α. This agrees with theargument in the previous work [25]. Then in smectic-Cphase, on the other hand, not only the director unlockingbut the anisotropic elasticity is arouse due to the emer-gence of the c-vector. Preferred angle θ between the layerbending orientation and the c-vector varies from 0 to

18
(a) η0 = 1Poise, η1 = 0Poise (b) η0 = 1Poise, η1 = 1Poise
(c) η0 = 1Poise, η1 = 2Poise
FIG. 21: Anisotropic viscosity dependence of the wave prop-agation. Even for η1 = 0, small anisotropy could be foundnear the source.
90 depending on the layer elastic constants, the Frankconstants, the tilt angle, and the undulation wavelength.The favored angle θ is determined by the combinationof the density and Frank elasticity and the coupling be-tween them. We also compared smectic liquid crystalswith other layer forming materials.
Next we discuss the hydrodynamics of smectic-C lay-ers using the effective elastic energy derived above.Anisotropic wave propagation from the isotropic oscil-
latory source and the director reorientation in the simpleundulation in one direction are confirmed. These effectis within the reach of experiment. By converting the me-chanical undulation to the optical information throughthe director reorientation, here arises a new possible ap-plication of liquid crystals for a sensitive mechanical sen-sor.
In all, we studied macroscopic elastic properties bycontraction of orientational degrees of freedom. Thisgives an example of nontrivial phenomena which ariesfrom the multiple degrees of freedom in soft condensedmatter.
Acknowledgments
The author thanks Nariya Uchida, ToshihiroKawakatsu, Hiroaki Honda and Takashi Shibatafor valuable discussions, nice suggestions, insightfulcomments, and carefully reading the manuscript. Thiswork is supported financially by the twenty-first centuryCOE program of Tohoku University.
zn m
xu=u0cos(qx)
zn m
xu=u0cos(qx)
FIG. 22: Schematic representation of the smectic layer undera sinusoidal undulation. Here exist the small unlocking angleα between the layer normal and the director, which accountsthe weak bending elastic modulus.
APPENDIX A: EFFECTIVE LAYER BENDING ELASTIC MODULUS AS A FUNCTION OF m-nUNLOCKING ANGLE
Here in this appendix we give a better representation of the effective layer bending elastic modulus (9), as a functionof the root of the mean square (RMS) of the angle α between the layer normal and the director. This might lead usto a more quantitative understanding of the previous numerical result on the mean curvature of layers in the TGBphase [25].
First we suppose a single Fourier layer undulation mode u(r) = u0 cos(qx) (Fig.22). The wave-number vector isalong the x-axis. With the help of (6), the undulation is followed by the deformation of m and n
nx =1
1 + (λq)2qu0 sin(qx), (A1a)
mx = qu0 sin(qx), (A1b)ny = my = 0, (A1c)nz = mz = 1. (A1d)

19
In a small deformation, the tilt angle α is given by
α ' mx − nx =(λq)2
1 + (λq)2qu0 sin(qx). (A2)
The RMS α is readily calculated
α =1√2
u0λ2q3
1 + (λq)2' 1√
2u0λ
2q3, (A3)
where the smooth undulation condition q ¿ λ−1 is assumed in the last line. We note that the tilt angle is roughlyproportional to the cube of the wave-number, and the characteristic length is a combination of the penetration lengthand the undulation amplitude
(λ2u0
)1/3. Thus the wave-number dependent effective layer bending rigidity is nowwritten as a function of α
κ (α) =K
1 +(√
2αλ/u0
)2/3. (A4)
The same method can be applied for the Sm-A phase also in the Chen-Lubensky model.
APPENDIX B: VARIATIONS OF THE FREE ENERGY WITH RESPECT TO THE DIRECTOR
Here we present the detailed calculations. Inserting (15) into (11a) using Ψ(r) = Ψ0 exp [iq0 (z − u(r)) /N3] insteadof (14), we obtain
fcpl =2C‖
N23
(δn3 − n · ∇u)2 +2C⊥
N23
(1 − n2
3 + 2n3n · ∇u − 2∂zu + (∇u)2 − (n · ∇u)2)
+2D‖
1
N23
(nn : ∇∇u)2 +q20
N43
(δn3 − n · ∇u)4
+4D‖⊥
nn : ∇∇
N3u
(∇2 − nn : ∇∇
N3u + ∇ · n
)+
q20
N43
(δn3 − n · ∇u)2(1 − n2
3 + 2n3n · ∇u − 2∂zu + (∇u)2 − (n · ∇u)2)
+2D⊥
(∇2 − nn : ∇∇
N3u + ∇ · n
)2
+q20
N43
(1 − n2
3 + 2n3n · ∇u − 2∂zu + (∇u)2 − (n · ∇u)2)2
,
(B1a)
fFrank = |∇δn|2 + κ1 |∇ · δn|2 + κ2 |N · ∇ × δn|2 , (B1b)

20
where the reduced coefficients O ≡ OΨ20q
20/K3 (O = C‖, C⊥, D‖, D‖⊥, D⊥), κ1 ≡ (K1 − K3)/K3 and κ2 ≡ (K2 −
K3)/K3 are used. The variations with respect to the director n(r) are
δF
δni=
δF
δni
(0)
+δF
δni
(1)
(i = 1, 2, 3), (B2a)
δF
δn1
(0)
=δF
δn2
(0)
= 0, (B2b)
δF
δn1
(1)
= −2
2D⊥ (∂1 − γ1∂3) ∂1 + ∇2
δn1 − 4D⊥ (∂2 − γ2∂3) ∂1δn2
−2κ1∂1∇ · δn − 2κ2 (N2∂3 − N3∂2) (N ×∇) · δn
+4
N3
C⊥ + 2D⊥q2
0
(1
N23
− 1)− D⊥
(∇2 − NN : ∇∇
)− D‖⊥NN : ∇∇
∂1u,
(B2c)
δF
δn2
(1)
= −4D⊥ (∂1 − γ1∂3) ∂2δn1 − 2
2D⊥ (∂2 − γ2∂3) ∂2 + ∇2
δn2
−2κ1∂2∇ · δn − 2κ2 (N3∂1 − N1∂3) (N ×∇) · δn
+4
N3
C⊥ + 2D⊥q2
0
(1
N23
− 1)− D⊥
(∇2 − NN : ∇∇
)− D‖⊥NN : ∇∇
∂2u,
(B2d)
δF
δn3
(0)
= − 4N3
C⊥ + 2D⊥q2
0
(1
N23
− 1)
, (B2e)
δF
δn3
(1)
= −2[2γ1
N23
A − C⊥ − 2D⊥q2
0
(1
N23
− 1)
+ 2D⊥ (∂1 − γ1∂3) ∂3 + γ1∇2
]δn1
−2[2γ2
N23
A − C⊥ − 2D⊥q2
0
(1
N23
− 1)
+ 2D⊥ (∂2 − γ2∂3) ∂3 + γ2∇2
]δn2
−2κ1∂3∇ · δn − 2κ2 (N1∂2 − N2∂1) (N ×∇) · δn
−4[
1N2
3
A − C⊥ − 2D⊥q2
0
(1
N23
− 1)
N · ∇u
− 2N3
C⊥ + D⊥q2
0
(3
N23
− 1)− D⊥
(∇2 − NN : ∇∇
)− D‖⊥NN : ∇∇
∂3u
],
(B2f)
where A = C‖ +4D⊥q20 +2D‖⊥q2
0
(1/N2
3 ) − 1, O(0) and O(1) mean the zeroth and first order parts of O respectively
in terms of u and δn, and the higher order terms are neglected. The equations of state are obtained with thesubstitution of (B2b)-(B2f) into (18).
APPENDIX C: CALCULATION OF THE SMECTIC-C FREE ENERGY
Here we calculate the effective free energy of the smectic-C phase within the linear approximation. It might beuseful to note that from (27)
δn3 = − 2iu
DC
ED
′(γ1q2 − γ2q1)
2 + EN2⊥q2 + dq2N3Q3 + Eκ2Q
23 + dκ2N3Q3 (N × q)2
,
(C1)
δn · q = − 2iu
DC
N3dq2 (N × q)2 + 2N3dA (γ1q2 − γ2q1)
2 + Eq2Q3
+Eκ2Q3 (N × q)2 + N3dκ2 (N × q)4
. (C2)

21
For brief, we separate (11a) by the order of perturbation δn.
F =K3
2
∫q
(f (0) + f (1) + f (2)
), (C3a)
f (0) =2|u|2
N23
− (N · q) E + 4D⊥q2
0q3Q3 + D‖ (N · q)4
+2D‖⊥ (N · q)2 (N × q)2 + D⊥ (N × q)4
, (C3b)
f (1) = −4iu∗
(Eδn3
N23
+dδn · q
N3
)
= −8 |u|2
DC
[(ED
′
N23
+ 2d2A
)(q2γ1 − q1γ2)
2 + q2
E2N2
⊥N2
3
+ d2 (N × q)2
+2Edq2
N3Q3
+κ2
EQ3
N3+ d (N × q)2
2 , (C3c)
f (2) = q2 |δn|2 +2A
N23
|δn3|2 + 2D⊥ |δn · q|2 . (C3d)
We finally obtain the total effective free energy with the equilibrium relation 2f (2) + f (1) = 0. (Differentiate g(xi) =g(0) + g
(1)i xi + g
(2)ij xixj with respect to xk) Expression for the layer deformation with the constant layer width q3 = 0
is (29a).
APPENDIX D: DERIVATION OF D⊥D‖ − D2‖⊥ > 0
Here we prove the relation D⊥D‖ − D2‖⊥ > 0 to guarantee the convexity of the effective free energy as a function
of x = cos2 ϑ in the one Frank constant case (31). This relation, actually, holds for an arbitrary set of Frank elasticmoduli, because the inequality is based on the stability of the smectic layer. With the density profile Ψ = Ψ0 exp(q ·r),the q-dependent part of the Chen-Lubensky Hamiltonian (11a) is
F =∫
drΨ20
[D‖Q
4‖ + 2D⊥‖Q
2‖Q
2⊥ + D⊥Q4
⊥
], (D1)
where the constant term is ignored, and the effective momenta Q2‖ = (q‖ − q0)2 + q2
0‖ and Q2⊥ =
q2⊥ − q2
0⊥, the characteristic wave number q20‖ =
(C‖D⊥ − C⊥D⊥‖
)/
[2
(D⊥D‖ − 2D2
⊥‖
)]and q2
0⊥ =(C‖D⊥‖ − C⊥D‖
)/
[2
(D⊥D‖ − 2D2
⊥‖
)], and the projected wave-number vector q‖ = (n · q)n, q⊥ = −n × (n × q)
are utilized. Positive definiteness of (D1) requires
D⊥D‖ − D2⊥‖ > 0, (D2a)or
D⊥D‖ − D2‖⊥ > 0. (D2b)
This condition is necessary for the positivity of (31).
APPENDIX E: SPLAY FRANK ENERGY AS A FUNCTION OF ϑ
We calculate the splay energy for given tilt angle α and the angle ϑ between c and q⊥. Let the x-axis be parallelto the deformation wave vector q⊥. The director vector is n = (sin α cos ϑ, sinα sinϑ, cos α). Assuming the smoothlayer undulation q⊥ ¿ λ−1, the director deformation perfectly follows the layer normal vector. Undulated directorconfiguration is obtained by operating the rotation matrix about the y-axis Ry
Ry =
cos qx 0 − sin qx0 1 0
sin qx 0 cos qx
, (E1)

22
to the reference director n. Thus the spatially averaged splay energy is expressed as⟨∇ · (Ryn)2
⟩=
q2
2(sin2 α cos2 ϑ + cos2 α
). (E2)
Stability of the θ = 90 state grows as the splay Frank elasticity dominates. However this effect of the splay term iscomparably weak, due to the factor sin2 α.
[1] P. G. de Gennes, The Physics of Liquid Crystals (OxfordUniversity, London, 1974).
[2] P. M. Chainkin and T. C. Lubensky, Principles of Con-densed Matter Physics (Cambridge University Press,Cambridge, England, 1995).
[3] P. H. Keyes, H. T. Weston, and W. B. Daniels, Phys.Rev. Lett. 31, 628 (1973).
[4] A. Aharony, R. J. Birgeneau, J. D. Brock, and J. D.Litster, Phys. Rev. Lett. 57, 1012 (1986).
[5] R. Shashidhar, B. R. Ratna, and S. K. Prasad, Phys.Rev. Lett. 53, 2141 (1984).
[6] Y. Drossinos and D. Ronis, Phys. Rev. A 33, 589 (1986).[7] P. G. de Gennes, Mol. Cryst. Liq. Cryst. 21, 49 (1973).[8] K. C. Chu and W. L. McMillan, Phys. Rev. A 15, 1181
(1977).[9] J. Chen and T. C. Lubensky, Phys. Rev. A 14, 1202
(1976).[10] L. Benguigui, J. Phys. (Paris). Colloq. 40, C3 (1979).[11] C. C. Huang and S. C. Lien, Phys. Rev. Lett. 47, 1917
(1981).[12] G. Grinstein and J. Toner, Phys. Rev. Lett. 26, 2386
(1983).[13] S. Witanachchi, J. Huang, and J. T. Ho, Phys. Rev. Lett.
50, 594 (1983).[14] C. R. Safinya, L. J. Martinez-Miranda, M. Kaplan, J. D.
Litster, and R. J. Birgeneau, Phys. Rev. Lett. 50, 56(1983).
[15] L. J. Martinez-Miranda, A. R. Kortan, and R. J. Birge-neau, Phys. Rev. Lett. 56, 2264 (1986).
[16] H. S. Kitzerow and C. Bahr, eds., Chirality in LiquidCrystals (Springer-Verlag, New York, 2002).
[17] P. G. de Gennes, Solid State Commun. 10, 753 (1972).[18] S. R. Renn and T. C. Lubensky, Phys. Rev. A 38, 2132
(1988).[19] J. W. Goodby, M. A. Waugh, S. M. Stein, E. Chin,
R. Pindak, and J. S. Patel, Nature 337, 449 (1989).[20] T. C. Lubensky and S. R. Renn, Phys. Rev. A 41, 4392
(1990).[21] M. Ismaili, A. Anakkar, G. Joly, and N. Isaert, Phys.
Rev. E 61, 519 (2000).[22] E. Grelet, B. Pansu, M. Li, and H. T. Nguyen, Phys.
Rev. Lett. 86, 3791 (2001).[23] B. A. DiDonna and R. D. Kamien, Phys. Rev. Lett. 89,
215504 (2002).[24] J. Yamamoto, I. Nishiyama, M. Inoue, and H. Yokoyama,
Nature 437, 525 (2005).[25] H. Ogawa and N. Uchida, Phys. Rev. E 73, 060701(R)
(2006).[26] E. Grelet, B. Pansu, and H. T. Nguyen, Phys. Rev. E 64,
010703(R) (2001).
[27] T. Ohta and K. Kawasaki, Macromol. 19, 2621 (1986).[28] G. Gompper and S. Klein, J. Phys. II (France) 2, 1725
(1992).[29] L. Leibler, Macromol. 13, 1602 (1980).[30] P. C. Martin, O. Parodi, and P. S. Pershan, Phys. Rev.
A 6, 2401 (1972).[31] A. Buka and L. Kramer, eds., Pattern Formation in Liq-
uid Crystals (Springer New York, 1996).[32] A. N. Pargellis, P. Finn, J. W. Goodby, P. Panizza,
B. Yurke, and P. E. Cladis, Phys. Rev. A 46, 7765 (1992).[33] T. Carlsson, F. M. Leslie, and N. A. Clark, Phys. Rev. E
51, 4509 (1995).[34] D. Johnson and A. Saupe, Phys. Rev. A 15, 2079 (1977).[35] P. E. Cladis, Y. Couder, and H. R. Brand, Phys. Rev.
Lett. 55, 2945 (1985).[36] C. Chevallard, T. Fisch, and J. M. Gilli, J. Phys. II
(France) 7, 1261 (1997).[37] N. Clark, Appl. Phys. Lett. 35, 688 (1979).[38] N. Clark and R. B. Meyer, Appl. Phys. Lett. 22, 493
(1973).[39] S. V. Yablonskii, K. Nakano, M. Ozaki, and K. Yoshino,
JETP Lett. 77, 140 (2003).[40] S. Uto, E. Tazoh, M. Ozaki, and K. Yoshino, J. Appl.
Phys. 82, 2791 (1997).[41] I. Luk’yanchuk, Phys. Rev. E 57, 574 (1998).[42] A. Kundagrami and T. C. Lubensky, Phys. Rev. E 68,
060703 (2003).[43] F. C. MacKintosh and T. C. Lubensky, Phys. Rev. Lett.
67, 1169 (1991).[44] L. Navailles, R. Pindak, P. Barois, and H. T. Nguyen,
Phys. Rev. Lett. 74, 5224 (1995).[45] Y. Hatwalne and T. C. Lybensky, Phys. Rev. E 52, 6240
(1995).[46] A. Meiboom and R. C. Hewitt, Phys. Rev. Lett. 34, 1146
(1975).[47] K. Yamada and T. Ohta, Eurphys. Lett. 73, 614 (2006).[48] K. Chen, C. Jayaprakash, R. Pandit, and W. Wenzel,
Phys. Rev. Lett. 65, 2736 (1990).[49] S. A. Safran, M. O. Robbins, and S. Garoff, Phys. Rev.
A 33, 2186 (1986).[50] Z. Wang and C. Gong, Phys. Rev. B 54, 17067 (1996).[51] H. Kuhn and H. Rehage, Phys. Chem. Chem. Phys. 2,
1023 (2000).[52] B. Tamamushi, Rheol. Acta 13, 247 (1974).[53] H.-Y. Chen and D. Jasnow, Phys. Rev. E 61, 493 (2000).[54] Y. Galerne, Phys. Rev. A 24, 2284 (1981).[55] L.-Y. Kuo, K.-L. Lee, and J.-J. Wu, Jpn. J. Appl. Phys.
45, 8775 (2006).


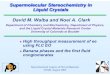










![Structural defects in smectic c* liquid crystals...smectic liquid crystalline solids [4-6] well crystalline solids. However, if long range distortions are induced, as in the case of](https://img.pdfslide.us/doc/110x75/60b41ce3df80f90374193325/structural-defects-in-smectic-c-liquid-crystals-smectic-liquid-crystalline.jpg)















