EE 330 Final Project
Elevator Controller Design Nhat Pham & Brittany Duffy
1
Table of ContentsIntroduction- 1 -Design- 1 -Design Strategy- 3
-Verilog Implementation- 4 -Elevator- 4 -Input, Output, and
Register- 4 -Initialization- 6 -Elevator Test bench- 9 -Registers
and Wires- 9 -Initialization- 10 -Verilog Simulation- 12 -Verilog
Synthesis with RTL Compilation- 13 -Layout of Digital circuits with
Encounter- 14 -1.Running SoC Encounter- 14 -2.Importing Synthesized
Verilog- 14 -3.Floorplanning- 14 -4.Power Planning- 15
-5.Placement- 15 -6.Routing- 16 -7.Filler Cells- 17
-8.Verification- 18 -9.GDS Export of Layout from Encounter- 19
-10.GDS Import of Layout into Virtuoso- 19 -Debouncing Circuit- 21
-Conclusion- 21 -
IntroductionFor our EE 330 Final Project, we chose to develop a
design for an eight-floor elevator. The inputs/outputs are shown
below. The elevator displays the moving direction and the current
floor. In addition, the maximum weight in the elevator is 4500lb.
If the current weight is larger than 4500lb, the elevator will
alert automatically. A Boolean signal comes from the maximum weight
detector and will be set to 1 whenever the maximum weight is
exceeded. The door of the elevator should not kept open for longer
than 3 minutes. Otherwise, it will close automatically. The door
alert signal should normally be low but go high whenever the door
has been open for more than 3 minutes. This door alert signal will
be used by the mechanical part of the elevator to issue a close
door command. Whenever the door is open for more than 3 minutes, a
blinking 30mA lamp will come on. This blinking will happen at a
rate of approximately 1 blink every 2 seconds. In addition, there
is a sensor at each floor to sense whether the elevator has passed
the current floor. This sensor provides a 3-bit Boolean signal that
encodes the floor that has been passed. We assumed we were given a
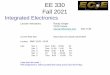
3-bit Boolean signal.DesignOur design consisted of five inputs:
Request Floor, Current Floor, Weight Sensor, Clock, and Reset along
with five system outputs: Complete, Direction, Current Floor,
Weight Alert, and Door Alert. Below is the diagram of our system:
Input [2:0]
Input [2:0]
Input [2:0]
Request Floor Current Floor
Weight Sensor
CLK
Reset
Complete
Direction
CurrentFloor
Weight Alert
DoorAlert1: Reach Floor0: Otherwise
1: Up0: Down
Output [2:0]
Input Clock
1: Weight Exceeded0: Otherwise
Input Reset
1: Open for 3 min0: Otherwise
Figure 1: System Diagram
The original design did not include the Weight Sensor; however,
we added a Weight Sensor input port to the system because the
Weight Alert output depend the corresponding Weight Sensor input.
Without the Weight Sensor input we will not able to check whether
the maximum weight is exceeded or not. Below in Table 1 you can
view the design specifications:Port NameTypeDescription
Request floorInput8bits
Current floorInput8bits
Weight SensorInput1: Exceeded max weight0: Otherwise
CLKInput1 bit
ResetInput1 bit
CompleteOutput1: Reach the request floor0: Otherwise
DirectionOutput1: up0: down
Current floorOutput8bits
Weight AlertOutput1: Overload0: Otherwise
Door AlertOutput1: Open for 3 min0: Otherwise
Table 1: Design Specifications
Design StrategyUsing the finite state machine approach, we
developed an efficient way for the elevator to reach each floor
(Figure 2). Having the elevator go up and down was just a small
design portion of this final project. We thought of the case when
multiple buttons are pressed at once, having the elevator handle
each floor one state at a time until it reaches its final
destination. Also, we created a door alert with the assumption that
the door is always open once it reaches a floor. Once the request
floor and the current floor are equal, the counter begins to count
the clock cycles until it reaches 3 minutes. This is when the door
alert becomes on. In addition, we had to encounter if the elevator
exceeded a certain weight. In this case, we chose the elevator to
alarm users with the weight alert. When the weight alert is on, the
elevator is not able to go up nor down, and therefore we assume
that the doors are open at all times when the weight alert is on.
This in turn causes the door alert to come on and begin its count
to 3 minutes. You may find additional cases stated later during the
test bench section. The Verilog Implementation section and
Initialization also have a better description of how we went about
executing each instance.11111110000000
Figure 2: Finite State Machine Illustration
Verilog ImplementationIn order to design our circuit-using
Cadence, we first wrote code describing how our design would work
using a Hardware Description Language (HDL). Below is the Verilog
code describing the entire circuit:ElevatorInput, Output, and
Register
Figure 3: Input, Output, and Registers
WeightSensor:Weightsensor represent an input from mechanical
part hardware that sense whether the elevator is overweight or not,
which corresponding to:1: When the weight in the elevator is
exceeded 4500lb.0: When the weight in the elevator is less than
4500lb.
[2:0] Requestflr:3-bit Boolean input corresponds to each floor
that the user is requesting.Request FloorBinary
Floor 03b000
Floor 13b001
Floor 23b010
Floor 33b011
Floor 43b100
Floor 53b101
Floor 63b110
Floor 73b111
[2:0] Currentflr:3-bit Boolean input from each floor sensor that
encodes each floor the elevator is currently on.Current
FloorBinary
Floor 03b000
Floor 13b001
Floor 23b010
Floor 33b011
Floor 43b100
Floor 53b101
Floor 63b110
Floor 73b111
Complete:Complete is an output port that will display whether
the elevator has reached the requested floor.1: Completed and
currently at the requested floor.0: Not complete and currently not
at the requested floor.
Direct:Direct is an output port that displays the direction of
the elevator motion.1: Elevator is going up.0: Elevator is going
down.
wAlert:wAlert represent the weight Alert output port that will
display an alarm when the weight in the elevator exceeds 4500lb.1:
Weight in the elevator has exceeded the maximum weight of 4500lb.0:
Weight in the elevator is less than the maximum weight.
drAlert:drAlert represents the door alert output port. The door
alert will display an alarm signal when the door is open for more
than three minutes. In the instructions given, the original system
diagram does not have an input port that provides the state of the
elevator door (being open or closed); therefore, we included an
additional door alert input. We did not want to make too many
variations to the problem, so we decided to make an assumption: if
the elevator stays on a floor for longer than three minutes the
door alert will go on, assuming the door is always open once it
reaches its destination floor or if the elevator is not moving.1:
Door is open longer than 3 minutes.0: No door alert
[2:0] Displayfloor:Displayfloor is an output port that
represents the current floor output on the system diagram. This is
a 3-bit Boolean that will display the floor that the elevator just
reached.Current Floor(OUTPUT)Binary
Floor 03b000
Floor 13b001
Floor 23b010
Floor 33b011
Floor 43b100
Floor 53b101
Floor 63b110
Floor 73b111
Initialization Counter
Figure 4: Counter CodeIn the final project instructions, one of
the tasks that we accomplished was to make sure the door did not
stay open longer than three minutes; however, there was no input
port given that we could relate back to check whether the door is
open or close. We then made an assumption that if the elevator
stays at a certain floor for more than three minutes, the door has
been open the entire time starting from when the elevator reaches
that floor. In the case when the elevator has been at a certain
floor for more than three minutes, the door alert will go high. To
accomplish this task, we kept track of the clock cycles, which we
used in conjunction with the counter technique that we learned in
previous homeworks. We registered an 8-bit Boolean to the counter
to ensure that we covered at least 180 cycles. Our clock of 1MHz
has one second for each period; therefore, we needed the total of
180 periods, which will equal three minutes. The counter will add
one every time the clock goes from 0 to 1 (positive edge), which
will track the time.
Counter Simulation:
Figure 5: Counter Simulation ResultWe can clearly see that the
door alert goes high when the counter reaches 3 minutes or 180
seconds. The Figure 6 shows our simulation result: Point Where Door
Alert Comes On
180sec = 3 minutes
Figure 6: Door Alert Simulation Result
Finite State Machine
Figure 7: Finite State Machine CodeOur main focus in this
project was determining how to move the elevator among all of the 8
floors. During our team discussion, we realize that this elevator
system works much like a finite state machine. For example, if the
elevator wants to move from floor 0 to floor 7, it has to go up and
pass every single floor until reach floor 7. We were instructed
that at each floor a sensor was there telling the user which floor
the elevator is currently on/currently passing; therefore, we
assumed each floor corresponds to a different state. Currentflr
< requestflr && weightsensor != 1In this case, we will
constantly check for the requested floor and compare it with the
current floor the elevator is on. If the request floor is larger
than the current floor, this means that we have to move up while
continuing to check for the current floor input and request floor
input. The elevator will only compare if the weight sensor is low,
which means the weight inside the elevator does not exceed 4500lb.
Currentflr > requestflr && weightsensor != 1With
basically the same scenario as described before, we will constantly
check for the requested floor and compare it with the current floor
the elevator is on. If the request floor is smaller than the
current floor, it means that the elevator has to move down while
checking for the current floor input and request floor input. The
elevator will only compare if the weight sensor is low (which in
this case it is). This means the weight inside the elevator does
not exceed 4500lb. Currentflr == requestflr && weightsensor
!= 1In this case, we will compare the request floor with the
current floor the elevator is on. When the current floor is equal
to the requested floor, the request will be complete. Once the
request is accomplished, the system will display a complete output.
We have to keep in mind that this will only happen when the weight
inside the elevator is under the maximum weight. Weightsensor ==
1One last and very important scenario is when the weight exceeds
4500lb. In this case, the elevator will not do anything but alarm
the user with the weight alert and stay at the current floor.
Elevator Test benchRegisters and WiresIn our process of
developing a test bench, we have to create a timescale delay that
allows the counter to reach 3 minutes. In addition, we want to make
our results easy view, so we used the timescale of 100ms/100ms. If
we had too small of a time scale, then the counter would take a
very long time to reach 3 minutes in real time. Figure 8: Registers
and Wires
InitializationBelow is our initialization for our test bench. In
order to ensure that our elevator Verilog code is working
correctly, we create a test for different scenarios that could
possibly happen when the user operates the elevator.
Figure 9: Test Bench Initialization
Movement TestThis motion test verifies that the elevator move up
and down upon user request. For example, if a user wants to go up
to the 7th floor from the basement (floor 0). The elevator will
begin to compare the current floor with the requested floor and
move up to floor 1 meanwhile displaying the direction which the
elevator is moving. Once the elevator has reached floor 1, the
system will display floor1 and compare floor 1 with requested floor
again. The system will repeat until the current floor is the same
as the requested floor. The system will then display the current
floor and issue a complete signal. The same concept will happen
during the traveling down scenario. A result is shown below to
demonstrate our test.
Figure 10: Elevator Movement Test BenchElevator constantly
checking for current floor
Display complete when reached requested floor.
Figure 11: Elevator Movement Test Bench Simulation Result
Test Weight AlertTo ensure safety, the elevator will always
check the sensor. In the case of the elevator weight exceeding
4500lb, the weight sensor will go high to let the system know that
the maximum weight is exceeded. The elevator will then sound weight
alert alarm and not move to its requested floor; it will say at its
current floor.
Figure 12: Weight Alert Test Bench
Weight alert also goes high.Weight sensor went high.
Figure 13: Weight Alert Test Bench Simulation Result
Verilog SimulationIn order to assure this code is giving the
correct outputs, we compared the outputs of each module to its
expected outputs. In the end, we determined that each module was
giving the correct output. Below is the waveform of the elevator
module generated according to the test bench we developed:Door
Alert goes high when reaching 3 minutes
Figure 14: Test Bench Simulation ResultVerilog Synthesis with
RTL CompilationWith the Verilog code written and verified for
correct output, we next had to design our circuit layout using RTL.
To begin, we set up all of the files synthesized by using the
terminal. The following topics were the basic flow of the design:1.
Design in HDL ( Verilog file )2. RTL Compiler ( Verilog file -->
Synthesized Verilog file ) 3. Encounter ( Synthesized Verilog file
--> Layout )4. Cadencea. Layout Import ( Encounter --> CIW
Import Stream)b. Netlist Import ( Synthesized Verilog file -->
Verilog Import ) 5. LVS VerificationOnce we loaded the Verilog file
for the Boolean function into the RTL Compiler, the following image
resulted after the synthesis update.
Figure 15: Synthesized Verilog
Layout of Digital circuits with Encounter1. Running SoC
EncounterIn the lab folder, we created a folder named encounter and
then entered the encounter folder. we began Encounter by entering
encounter in the command line. Figure 16 shows the GUI.
Figure 16: GUI
2. Importing Synthesized VerilogOnce Encounter was initiated, we
imported our synthesized HDL description file. But first, we set
the power nets for a later step by typing various commands in the
encounter terminal.
3. FloorplanningThe Encounter GUI displayed an empty die and the
information box in the bottom-right corner read Design is: In
Memory. The next step was to specify a floorplan for the layout.
Floorplanning is done to specify the dimensions of the layout and
spacing between the core (or area where the standard cells are
placed) and power/signal routing. We opened up the floorplanning
options by clicking on the Floorplan menu and selecting Specify
Floorplan. Figure 17 shows the floorplanning layout.
Figure 17: Floor Planning
4. Power PlanningIn this next section, we added power rings into
floor rings. To connect supply voltages to the standard cells,
power and ground need to be available on all sides of the die.
Adding power rings and specifying global net connections do
this.
Figure 18: Power Planning
5. PlacementNow we were ready to perform the placement. At the
end, the cells used in the design were placed so that they didnt
overlap and so that there was enough space for routing in between
them. We selected the Place menu and then Standard Cells. In the
main GUI window. We verified that the standard cells were placed by
selecting the Physical View Icon in the upper-right. Figure 19
shows the result.
Figure 19: Placement
6. RoutingThe built-in routing options within Encounter can now
be used to connect the supply nets and create interconnects between
the standard cells. Power and ground routing is performed with the
Special Route tool. This was found by selecting the Route menu and
then Special Route. In the dialog box that appears, we unselected
Block pins, Pad pins, and Pad rings. After clicking OK, we saw
horizontal and/or vertical metal power routing added to the design
(Fig 20). Once the power routing was complete, the remaining
connections between standard cells and the die I/O were routed
using the NanoRoute tool. Figure 21 shows the result.
Figure 20: Routing
Figure 21: NanoRouting
7. Filler CellsFiller cells were placed by selecting the Place
menu and then Physical Cell -> Add Filler. The filler cells fill
in blank regions in the core of the layout (Figure 22). These cells
provide continuity for nwell layers and power rails between placed
cells.
Figure 22: Filler Cells
8. VerificationBefore exporting the layout, we verified that
there were not any geometric errors that occurred during placement
or connectivity errors from routing. We verified by selecting
Verify Geometry and Verify Connectivity in the Verify menu. Reports
were then generated. Please see the following figures for
verification.
Figure 23: Geometric Verification
Figure 24: Connectivity Verification
9. GDS Export of Layout from EncounterOnce the layout was
complete in Encounter (post-routing and post-filler cells), we then
performed an export of the layout.
10. GDS Import of Layout into VirtuosoAfter creating a layout in
Encounter and creating the GDS file, we opened Virtuoso. We clicked
on the CIW (Virtuoso window where errors and messages appear) and
clicked File -> Import - > Stream. We translated the file to
import the design. As you can see in Figure 25, only a few warnings
were given. The layout in Virtuoso is shown in Figure 26. The LVS
was then ran.
Figure 25: Translate
Figure 26: Final LayoutDebouncing CircuitThe debouncing circuit
on any critical input is a great technique to eliminate the
interpretation of multiple input signals. For example, anytime a
switch is opened or closed, there is some chance that multiple
opening and closing will be counted; however, for our elevator
controller system the debouncing circuit is not necessary because
as long as input signals are given, the system will compare and
respond to each particular task at hand. ConclusionThis project was
extremely fun to work on because we were able to design a circuit
that can be extremely useful in the elevator industry. Throughout
the process we ran into various problems that took us a while to
develop solution for; however, once we overcame each problem we
learned a way to solve that problem for future reference. This
project helps us understand much more about Hardware Description
Languages in the working environment. As soon as we started the
analyzing process, we found that there were many problems that were
never clarified in the introduction. To finish the given task, we
developed our own understanding and assumptions of the problem and
ways to solve it. Ultimately, our design satisfied all the required
functions. Our Verilog simulation was identical to the theoretical
result, and finally our layout passed the DRC. Overall, we really
enjoyed this project and are quickly realizing what it is like to
be an electrical engineer.





![EE 330 Lecture 42 - Iowa State Universityclass.ece.iastate.edu/ee330/lectures/EE 330 Lect 42 Fall 2016.pdf · EE 330 Lecture 42 Digital Circuits • Elmore Delay ... Elmore delay[1]](https://img.pdfslide.us/doc/110x75/5b57fe847f8b9a4e1b8b664d/ee-330-lecture-42-iowa-state-330-lect-42-fall-2016pdf-ee-330-lecture-42-digital.jpg)