Embed Size (px)
Citation preview
ECE 477 Final Presentation Team 18 Spring 2013
Derek Pesyna, Tim Brown, Evan Foote, Doug Wile
Outline
• Project overview• Block diagram• Design challenges• Individual contributions• Project demonstration• Questions / discussion
Project Overview
Humble Hubble is a self-aiming telescope. This telescope will obtain its global position and the local time via GPS. It will then automatically orient itself to point at a user selected target (star) using a variety of onboard sensors.
Underlying motivation:
A desire to combine a knowledge and passion for electrical and computer engineering with an interest in astronomy to create a useful and educational product.
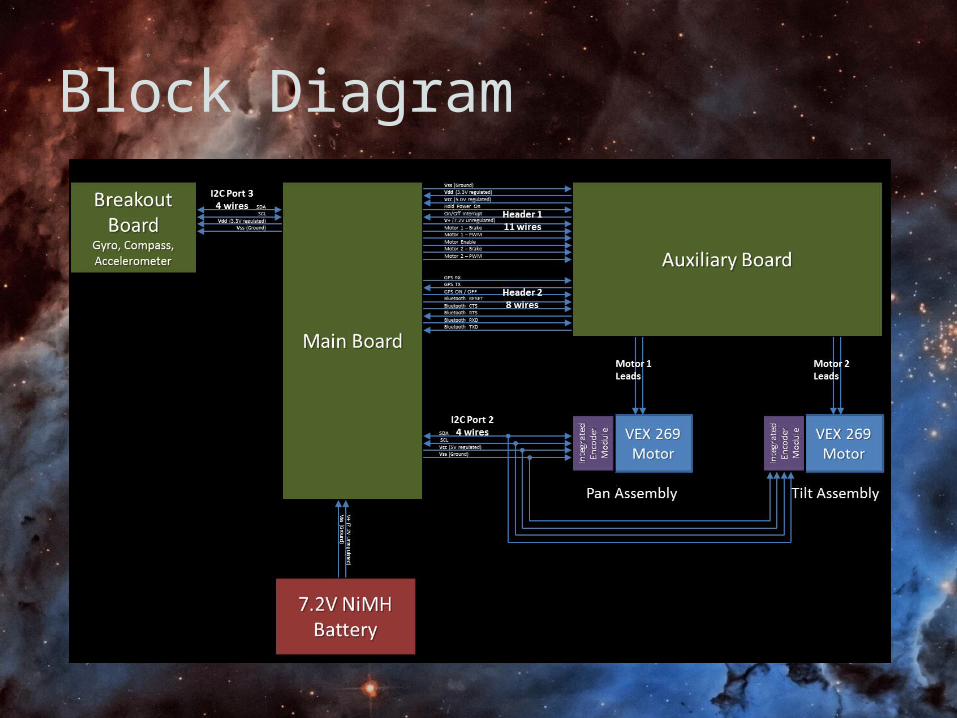
Block Diagram
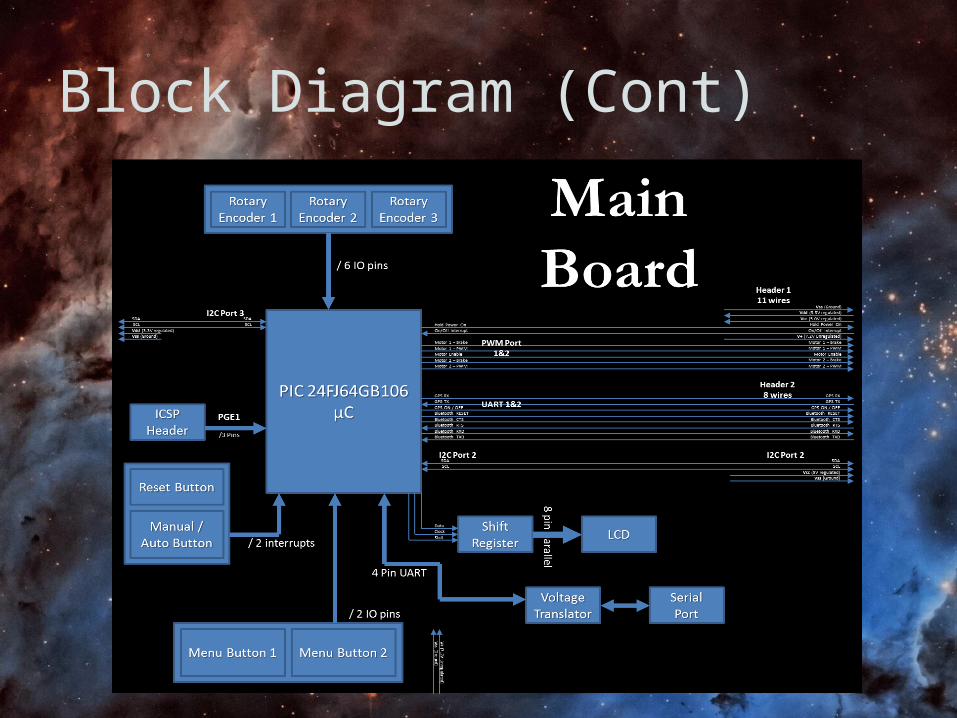
Block Diagram (Cont)
Design Challenges
• Digital sensors in small form factor• Components replaced after PCB• Several components sensitive to EMR (Bluetooth,
GPS, compass)– Break PCB into three separate boards
• GPS signal not always available– Include manual mode
• Sensors prone to error (EMI, device gets bumped during operation, etc)– Include calibration mode to offset the error
Individual Contributions
• Team Leader – Doug Wile• Team Member 2 – Tim Brown• Team Member 3 – Derek Pesyna• Team Member 4 – Evan Foote
Team Leader – Doug Wile
• PCB Layout• Celestial Coordinates vs Horizon
Coordinates research• Star data consolidation• Microcontroller software
Member 2 – Tim Brown
• Microcontroller Selection• Pin assignment• PCB Footprints• Microcontroller software
Member 3 – Derek Pesyna
2 Major Contributions:• Packaging and Design – CAD Model and built
mount• Android ‘Humble Hubble’ Application –
Programmed and Debugged Bluetooth communication application

Member 4 – Evan Foote
• Researched Major Components• Helped Design Circuit, Board Layout• Soldered PCBs
Project Demonstration1. An ability to establish a coordinate system based
on the telescope's absolute global position via a GPS chipset, and relative orientation based on an accelerometer and electronic compass.
2. An ability to compensate for combined variations in the Earth's gravitational and magnetic field, and variations in telescope geometry and mounting configurations via electronic user calibration: centering the optics on a desired target from a list of one or more prominent celestial bodies (i.e. the Moon, Polaris, Venus or other predetermined bright objects).
Project Demonstration (Cont)3. An ability to retrieve celestial coordinates and
targets via Bluetooth from an external host.
4. An ability to automatically move and point the telescope at the designated target using feedback loops from integrated motor encoders.
5. An ability to allow the user to manually override the telescope's target coordinate using an onboard electronic control interface, and to display information regarding headings on an onboard LCD.
Video Link: PSSC Demo Video
Questions / Discussion