Embed Size (px)
DESCRIPTION
Project Overview Automated Pill dispensing system that delivers pills based upon a schedule.Automated Pill dispensing system that delivers pills based upon a schedule. Can be monitored and controlled remotely via a web interface.Can be monitored and controlled remotely via a web interface. Able to be controlled locally using an optical rotary encoder and LCD screen.Able to be controlled locally using an optical rotary encoder and LCD screen.
Citation preview

ECE 477 Design Review ECE 477 Design Review Group 9 Group 9 Fall 2005 Fall 2005
Paste a photo of team members here, annotated with names of team members.
Tim Miller Clif Barnes Drew Heinrich Steven Kady

OutlineOutline• Project overview Project overview • Project-specific success criteriaProject-specific success criteria• Block diagramBlock diagram• Component selection rationaleComponent selection rationale• Packaging designPackaging design• Schematic and theory of operationSchematic and theory of operation• PCB layoutPCB layout• Software design/development statusSoftware design/development status• Project completion timelineProject completion timeline• Questions / discussionQuestions / discussion

Project OverviewProject Overview
• Automated Pill dispensing system that Automated Pill dispensing system that delivers pills based upon a schedule.delivers pills based upon a schedule.
• Can be monitored and controlled remotely Can be monitored and controlled remotely via a web interface.via a web interface.
• Able to be controlled locally using an optical Able to be controlled locally using an optical rotary encoder and LCD screen.rotary encoder and LCD screen.

Project-Specific Success CriteriaProject-Specific Success Criteria• Ability to dispense pills using a mechanical Ability to dispense pills using a mechanical
system, under the control of a microcontroller system, under the control of a microcontroller through PWM through PWM
• Ability to Display current status of system using Ability to Display current status of system using LCD and LEDs LCD and LEDs
• Ability to alert the user when pills have been Ability to alert the user when pills have been dispensed through audible and visible alarmdispensed through audible and visible alarm..
• Ability to dispense pills based on a user defined Ability to dispense pills based on a user defined schedule. schedule.
• Ability to control device/change settings through Ability to control device/change settings through Ethernet with embedded web server Ethernet with embedded web server

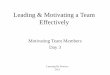
Block DiagramBlock Diagram
MC9S12NE64
LCD Display
Rotary Interface
Sensors
Web Interface
Dispensing Mechanism
User Control
TCP/IP
Motor Control
Status Data
Motor Position Data

Component Selection Rationale Component Selection Rationale • MicrocontrollerMicrocontroller
– Freescale MC9S12NE64CPVFreescale MC9S12NE64CPV• Ethernet connectivityEthernet connectivity• ExpandabilityExpandability• Power ConsumptionPower Consumption• Familiarity with ArchitectureFamiliarity with Architecture
• Stepper MotorStepper Motor– 403-1014-ND 403-1014-ND
• SizeSize• PrecisionPrecision

Packaging DesignPackaging Design• DurabilityDurability• SecuritySecurity

Schematic/Theory of OperationSchematic/Theory of Operation
+3.3VDC
D39
DIODE
C51.34uF
Vin1
Vout3
GND
2GN
D_T
4U20
MIC39100-WS
Vin1
Vout3
GND
2GN
D_T
4U19
MIC39100-WS
12
J8
9VDC
BT19V
9VDC Wall Wart
0.447uF
.447uF
D46
DIODE
D47
DIODE
+5VDC
•Power Circuit•9VDC Wall Wart•2 Low Dropout Regulators
•3.3V Regulated Output•5.0V Regulated Output•Battery Backup

Schematic/Theory of OperationSchematic/Theory of Operation
+5VDC
PA7/PA6
R12
10K
D48
DIODE
D53
DIODE
+5V
Coil B22
+5Va3
+5V4
GND5
Free Spin(*)6
DIR(*)7
Half-Step(*)8
Step(*)9
Coil A118
Coil A217
OSC116
OSC215
+5Vb14
C(*)13
B(*)12
A(*)11
Run(*)10
Coil B11
U10
EDE1204
D40
DIODE
+5V
1234
JP1
HEADER 4
D49
DIODE
1 2 3
6 5 4
SW3SW DIP-3
D41
DIODE
R1310K
Chip Inhibit1
Input 12
Output 13
GNDa4
GND5
Output 26
Input 27
Vc8
Vs s16
Input 415
Output 414
GNDb13
GNDc12
Output 311
Input 310
Chip Inhib it 29
U12
LD293R1410K
R2110K
D50
DIODER1510K
D51
DIODE
VCC
D52
DIODE
PK7
•Stepper Motor Control•2 Bipolar Stepper Motors•Use Motor Control IC coupled with a Dual H-Bridge•Use of Flyback Diodes to suppress current during coil switching•Dip Switch to manually choose motor speed

Schematic/Theory of OperationSchematic/Theory of Operation• User InterfacingUser Interfacing
R93.3K
PG4
+5V
PG3PG2
R103.3K
GND1PSHBTTN_12PSHBTTN_23OUT_A4OUT_B5+5V6
S1
GH6101-ND
PB5
PB1
PB6
R26
PB7
+5VDC
R2510K
PB2PB3
PJ1
+5VDC
PJ0
12345678910111213141516
J2
LCD HEADER
+5VDC
PB4
PB0
PH0
10K
LCD Interfacing
Optical Rotary Switch

Schematic/Theory of OperationSchematic/Theory of Operation
• Microcontroller CircuitMicrocontroller Circuit
C7
0.44uF
C110.22uF
3.3V
C8
0.22uF
MII_TXER/KWH6/PH61
MII_TXEN/KWH5/PH52
MII_TXCLK/KWH4/PH43
MII_TXD3/KWH3/PH34
MII_TXD2/KWH2/PH25
MII_TXD1/KWH1/PH16
MII_TXD0/KWH0/PH07
MII_MDC/KWJ0/PJ08
MII_MDIO/KWJ1/PJ19
ADDR0/DATA0/PB010
ADDR1/DATA1/PB111
ADDR2/DATA2/PB212
ADDR3/DATA3/PB313
VDDX114
VSSX115
ADDR4/DATA4/PB416
ADDR5/DATA5/PB517
ADDR6/DATA6/PB618
ADDR7/DATA7/PB719
MII_CRS/KWJ2/PJ220
MII_COL/KWJ3/PJ321
MII_RXD0/KWG0/PG022
MII_RXD1/KWG1/PG123
MII_RXD2/KWG2/PG224
MII_RXD3/KWG3/PG325
MII_RXCLK/KWG426
MII_RXDV/KWG5/PG527
MII_RXER/KWG6/PG628
KWG7
/PG7
29
SCI0
_RXD
/PS0
30
SCI0
_TXD
/PS1
31
SCI1
_RXD
/PS2
32
SCI1
_TXD
/PS3
33
SPI_
MIS
O/PS
434
SPI_
MOS
I/PS5
35
SPI_
SCK/
PS6
36
SPI_
SS(*)
/PS7
37
NOAC
C/PE
738
MOD
B/IP
IPE1
/PE6
39
MOD
A/IP
IPE0
/PE5
40
ECLK
/PE4
41
VSSX
242
VDDX
243
RESE
T(*)
44
VDDP
LL45
XFC
46
VSSP
LL47
EXTA
L48
XTAL
49
TEST
50
PL6
51
PL5
52
LSTR
B(*)/
TAGL
O(*)/
PE3
53
R/W
(*)/P
E254
IRQ(
*)/PE
155
XIRQ
(*)/P
E056
PL0/ACTLED84
PL1/LNKLED83
VDDR82
PL2/SPDLED81
PA7/ADDR15/DATA1580
PA6/ADDR14/DATA1479
PA5/ADDR13/DATA1378
PA4/ADDR12/DATA1277
PHY_VSSRX76
PHY_VDDRX75
PHY_RXN74
PHY_RXP73
PHY_VSSTX72
PHY_TXN71
PHY_TXP70
PHY_VDDTX69
PHY_VDD268
PHY_VSSA67
PHY_RBIAS66
VDD265
VSS264
PA3/ADDR11/DATA1163
PA2/ADDR10/DATA1062
PA1/ADDR9/DATA961
PA0/ADDR8/DATA860
PL3/DUPLED59
PL4/COLLED58
BKGRD/MODC/TAGHI(*)57
PJ6/
KWJ6
/IIC_
SDA
112
PJ7/
KWJ7
/IIC_
SCL
111
PT4/
TIM
_IOC
411
0
PT5/
TIM
_IOC
510
9
PT6/
TIM
_IOC
610
8
PT7/
TIM
_IOC
710
7
PK7/
ECS(
*)/RO
MCT
L10
6
PK6/
XCS(
*)10
5
PK5/
XADD
R19
104
PK4/
XADD
R18
103
VDD1
102
VSS1
101
PK3/
XADD
R17
100
PK2/
XADD
R16
99
PK1/
XADD
R15
98
PK0/
XADD
R14
97
VSSA
96
VRL
95
VRH
94
VDDA
93
PAD7
/AN7
92
PAD6
/AN6
91
PAD5
/AN5
90
PAD4
/AN4
89
PAD3
/AN3
88
PAD2
/AN2
87
PAD1
/AN1
86
PAD0
/AN0
85
MC9S12NE64CPV
U1
C20
0.22uF
C9
0.22uF
SW1
RESET
Y1
25 MHz
R2312.4K
R810K
C13
.22uF
3.3
R24
10K
3.3V
246
135
J7
BDM HEADER
R7
10M
C14470pF
C1615pF
C154700pF
C1715pF
C1
0.44uF
R62.2K

Schematic/Theory of OperationSchematic/Theory of Operation
• Ethernet InterfaceEthernet Interface– Utilizes NE64 onboard control signalsUtilizes NE64 onboard control signals– Magnetically Isolated RJ45 JackMagnetically Isolated RJ45 Jack
PHY_TXP
Ethernet Controller
C12
C
RD+
3.3VPHY_RXN
R2
49.9
R3
49.9RD-
PHY_RXP
RCT
TCT
TD-
TD+
PHY_TXN
TCT1
TD+2
TD-3
RD+4
RD-5
RCT6
LED1_AN7
LED1_CA8
LED2_AN9
LED2_CA10
RJ45 Jack
0810-1G1T-06
R27
49.9
R28
49.9

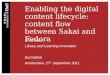
Schematic/Theory of OperationSchematic/Theory of Operation
• Feedback CircuitsFeedback Circuits
– 5 IR Sensors5 IR Sensors• 2 Spindle Position 2 Spindle Position
sensorssensors• 2 Spindle Drop 2 Spindle Drop
sensorssensors• Bin Full sensorBin Full sensor
4
3
1
2
A1
OPI1264B
4
3
1
2
A2
OPI1264B
4
3
1
2
A3
OPI1264B
4
3
1
2
A4
OPI1264B
R2210K
VCC
4
3
1
2
A5
OPI1264B
PA4
PA0
PA1
PA2
PA3
Spindle Drop Sensor
Spindle Drop Sensor
Bin Full Sensor
Spindle Position Sensor
Spindle Position Sensor

PCB LayoutPCB Layout

Software Design/Development StatusSoftware Design/Development Status
• Software DesignSoftware Design– Writing in C using Code WarriorWriting in C using Code Warrior– Command and Interrupt DrivenCommand and Interrupt Driven
• Development StatusDevelopment Status– Under ConstructionUnder Construction
• Motor ControlMotor Control• Web ServerWeb Server• Timing / SchedulingTiming / Scheduling

Project Completion TimelineProject Completion Timeline
• Software Software - 9 November- 9 November– Web ServerWeb Server - 9 November- 9 November– SchedulerScheduler - 2 November- 2 November– Motor ControlMotor Control - 26 October- 26 October
• PCBPCB - 2 November- 2 November• IntegrationIntegration - 16 November- 16 November• PackagingPackaging - 22 November- 22 November

Questions / DiscussionQuestions / Discussion