Embed Size (px)
Citation preview

ECE 477 Design Review ECE 477 Design Review Group 11 Group 11 Spring 2005 Spring 2005
Paul DullePat McLaughlin
Randy ScheifeleChad Bjorklund
David Meyer

OutlineOutline• Project overview Project overview • Project-specific success criteriaProject-specific success criteria• Block diagramBlock diagram• Component selection rationaleComponent selection rationale• Packaging designPackaging design• Schematic and theory of operationSchematic and theory of operation• Preliminary PCB layoutPreliminary PCB layout• Software design/development statusSoftware design/development status• Project completion timelineProject completion timeline• Questions / discussionQuestions / discussion

Project OverviewProject Overview
MAVerick (Motorized Assault Vehicle) is a mobile gun platform controlled by a cellular phone that has the ability to establish full-duplex communication with a command center in order to transmit control and status signals. It will contain a paintball gun attached to the platform which will fire at moving targets and have the ability to detect obstacles.

Project-Specific Success CriteriaProject-Specific Success Criteria
• ability to detect moving targets using an ultrasonic/IR sensor
• ability to identify and detect obstacles• ability to encode and send control signals
through a cellular phone to control the tank/gun• ability to receive and decode control signals from
the cellular• ability to send status information from the tank to
the controlling device

Block DiagramBlock Diagram

Component Selection RationaleComponent Selection Rationale
Mega8 Mega16 MC9S12C32MFU25
ATD converters 6 8 8PWM 3 4 6I/O Pins 23 32 58Frequency (MHz) up to 16 up to 16 up to 25Voltage Range (V) 2.7 - 5.5 2.7 - 5.5 2.97 - 5.5Price at digikey.com ($) 3.66 6.56 11.28
Microcontroller
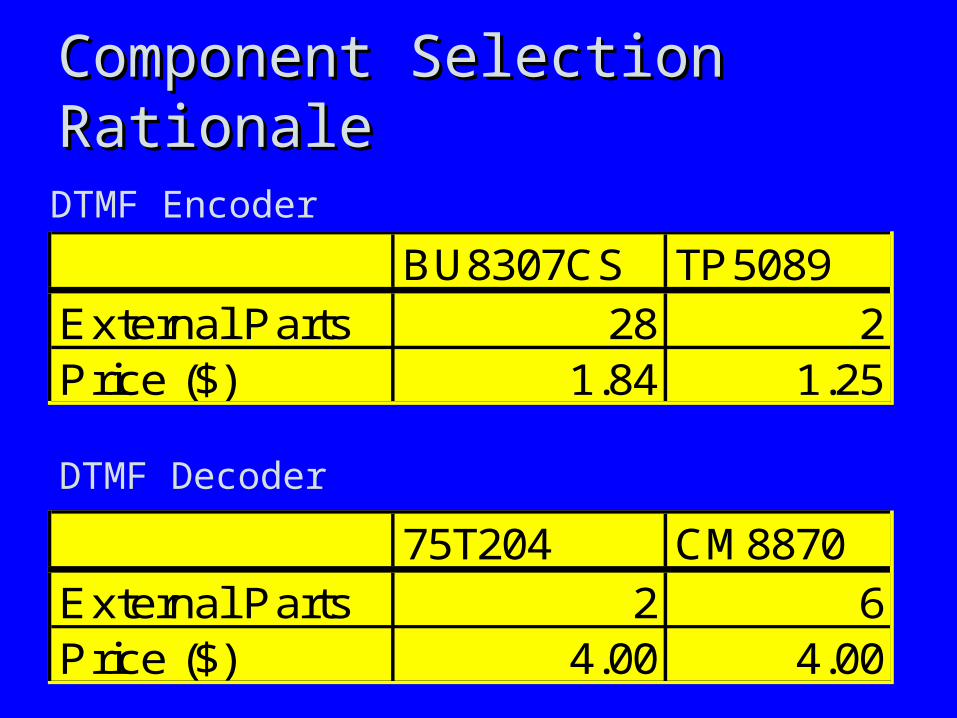
Component Selection RationaleComponent Selection Rationale
DTMF Encoder
DTMF Decoder
BU8307CS TP5089External Parts 28 2Price ($) 1.84 1.25
75T204 CM8870External Parts 2 6Price ($) 4.00 4.00

Component Selection RationaleComponent Selection Rationale
SRF04 SRF08 600 SmartRange (ft) 10 20 35Interface PWM I2C Initiate - EchoVoltage (V) 5 5 6 - 24Price ($) 36.00 59.50 55.00
Ultrasonic Sensor

Packaging DesignPackaging Design
The MAVerick will be packaged in the above pictured tank.
The turret will be removed and replaced by a paintball gun.
The circuit board and all wires will be housed inside of the tank.
All sensors will be mounted on the outside of the tank as seen in the next figure.

Length of Tank = 27”Width of Tank= 12”
Length of Paintball Gun = 19”The numbers on the drawing correspond to the components in the parts list.
Figure 1: Overhead view of tank concept drawing.

Width of base = 6”
Length of base = 6”
Height of base = 2”

1. 1. Atmel Mega16 MicroprocessorAtmel Mega16 Microprocessor 22 negligiblenegligible 13.1213.12
2. 2. Remote Control TankRemote Control Tank 11 88 59.0059.00
3. 3. Brass Eagle Marauder Paintball GunBrass Eagle Marauder Paintball Gun 11 1.31.3 33.4533.45
4. 4. Top Gun JoystickTop Gun Joystick 11 .8.8 32.4532.45
5. 5. Motokata Wireless Reversing & Parking SensorMotokata Wireless Reversing & Parking Sensor 44 .35.35 19.0019.00
6. 6. Ademco Infrared Motion SensorAdemco Infrared Motion Sensor 33 .45.45 24.6024.60
7. 7. DTMF Encoder ICS5089DTMF Encoder ICS5089 44 negligiblenegligible 5.005.00
8. 8. DTMF DecoderDTMF Decoder 44 negligiblenegligible 16.0016.00
9. 9. Senscomp Ultrasonic Sensor 615088Senscomp Ultrasonic Sensor 615088 11 .41.41 55.0055.00
10. 10. Senscomp Ultrasonic Housing 619395Senscomp Ultrasonic Housing 619395 11 negligiblenegligible 7.507.50
11. 11. Link ActuatorLink Actuator 11 .3.3 5.505.50
12. 12. Linksys Wireless-B Internet Video CameraLinksys Wireless-B Internet Video Camera 11 .38.38 106.91106.91
13. 13. Minebea Stepper MotorMinebea Stepper Motor 22 .4.4 7.907.90
Major Parts(more than $1) Number Total Weight(lbs.) Total Cost(US $)

Schematic/ Theory of OperationSchematic/ Theory of Operation• Motor ControlMotor Control

Schematic/ Theory of OperationSchematic/ Theory of Operation• Stepper Motor ControlStepper Motor Control

• DTMF CircuitsDTMF Circuits
Schematic/ Schematic/ Theory of Theory of OperationOperation

• Ultrasonic Ultrasonic SensorSensor
Schematic/ Schematic/ Theory of Theory of OperationOperation
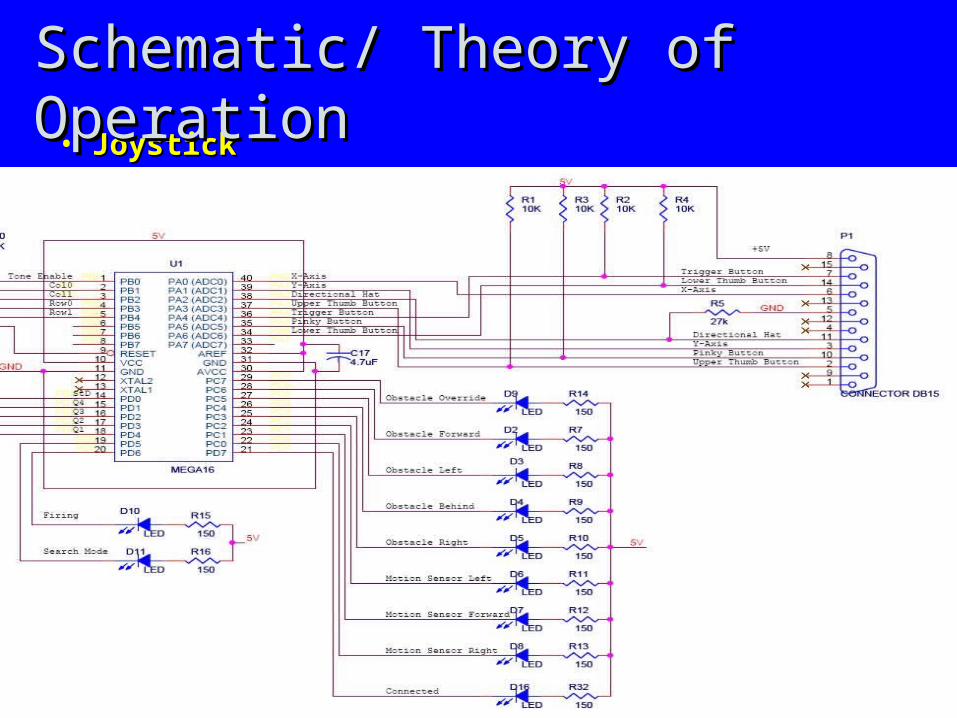
• JoystickJoystick
Schematic/ Theory of OperationSchematic/ Theory of Operation

Schematic/ Theory of OperationSchematic/ Theory of Operation• MicrocontrollerMicrocontroller

Schematic/ Theory of OperationSchematic/ Theory of Operation• HeadersHeaders

Preliminary PCB LayoutPreliminary PCB Layout• Command CenterCommand Center

Preliminary PCB LayoutPreliminary PCB Layout• TankTank

Software Software Design/Design/Development Development StatusStatus
• TankTank
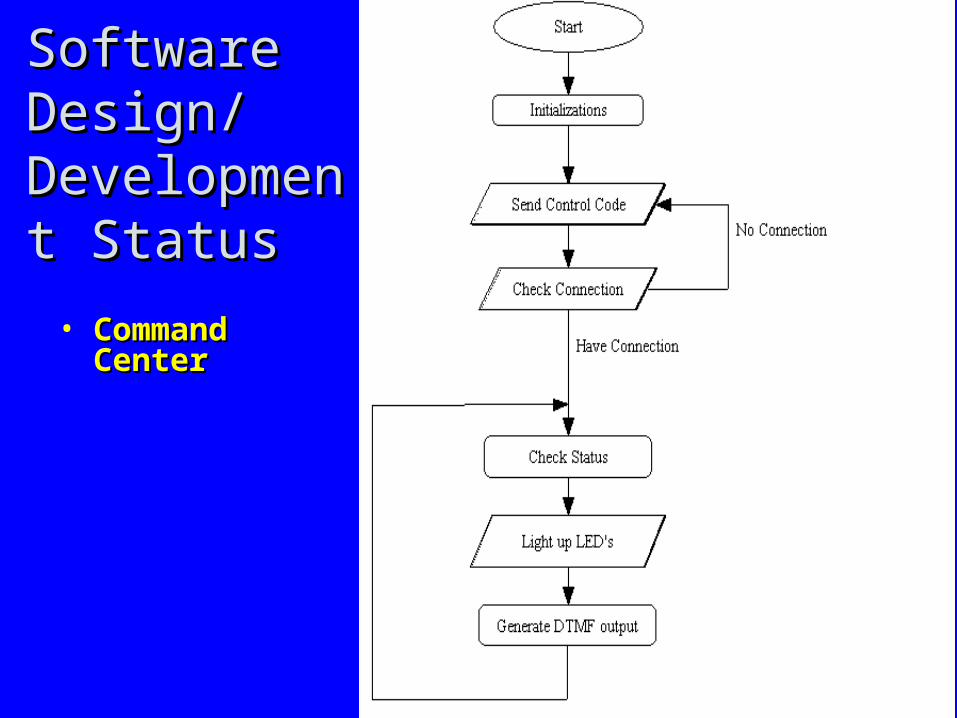
Software Software Design/Design/Development Development StatusStatus
• Command Command CenterCenter

Project Completion TimelineProject Completion Timeline
• PCB Layout – Done by March 7PCB Layout – Done by March 7thth
• Board Population – Done by March 24Board Population – Done by March 24thth
• Physical Construction – Done by March 31Physical Construction – Done by March 31stst • Software Development – Done by April 19Software Development – Done by April 19thth • Senior Design Report – Done by May 2Senior Design Report – Done by May 2ndnd

Questions / DiscussionQuestions / Discussion





![Factors influencing the adoption of open access scholarly communication in Tanzanian public universities Dulle, FW [1], Minishi-Majanja, MK [2], Cloete,](https://img.pdfslide.us/doc/110x75/56649e5f5503460f94b58df6/factors-influencing-the-adoption-of-open-access-scholarly-communication-in.jpg)























