Embed Size (px)
Citation preview

IntroductionQuelques rappels de Mathematiques
Dynamique des Structures
Introduction

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Mecanique du Point
Mecanique des Milieux Continus : Solides Deformables, Fluides, ...
Mecanique des Solides Indeformables
Mecanique Quantique
Mecanique Relativiste
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Point de vue structure
Point de vue structure : connaıtre a chaque instant pour tout ou partie del’avion
la position de n’importe quel point
les efforts : efforts exterieurs, efforts interieurs (contraintes, liaisons),efforts moteurs
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Vision Milieux deformables (1/2)
Mecanique des Milieux Continus =⇒ Modeles Elements Finis
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Approche Milieux deformables (2/2)
Problematiques abordees comportement vibratoire : frequences propres et modes propres
reponse a des sollicitations donnees
perturbation des conditions de vol : depressions, trous d’air...
ingestion d’oiseaux au niveau des moteurs, pertes d’aubes au niveau des rouesaubagees dans les reacteurs
...
Difficultes sous-jacentes description de la cinematique : mouvements d’ensemble, grandes
transformations, petits mouvements...
description des efforts : aspects aleatoires...
caracterisation du comportement des materiaux −→ lois decomportement
modele de grandes tailles −→ methodes de reduction de modeles
couplage Fluide Structure : −→ couplage fort, couplage faible
...P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Approche Multicorps Indeformable
Decomposition de la structure etudiee en un ensemble de SolidesIndeformables
Informations recherchees mouvements de type solide rigide pour chaque solide indeformable :
translations et rotations
efforts de liaison entre les differents solides −→ dimensionnement desliaisons
eventuellement les efforts moteurs a imposer −→ dimensionnement desmoteurs
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Approche Multicorps Deformable
O
C
P
s
−→x 0
−→y 0
−→z 0
−→x 1
−→y 1
ξ
ξ
C0
C1
P0θ1
v(s, t)
α(s, t)
Translation, rotation etdeformation pour chaquesolide
Approche 1 : grandestransformations pour chaquesolide
Approche 2 : decompositiondu champ de deplacementu = ur + ue avecue ≪ 1
Approche 2 : deux visions possibles pour resoudre methode 1 : resolution par etape
determination de ur en negligeant ue =⇒ approche MulticorpsIndeformable classique
determination de ue en introduisant les forces d’inertie associees a ur
methode 2 : determination simultanee de ur et ue
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Modelisation Multicorps Indeformable (1/4)
Choix d’une representation dusysteme etudie
decomposition du systemeen un certain nombre desolides
liaisons entre les solides
efforts
choix d’une description desdifferents mouvementspossibles
P. COSSON DYSTR
efforts de liaison entre solides
efforts moteurs au niveau des verins
S4 S3
S2
S1S
Phase d’analyse

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Modelisation Multicorps Indeformable (2/4)
θ1
−→x 0
−→y 0
O
−→z 0
G1
a
Position du pendule definieavec θ1
Position du pendule definieavec (x , y)
−−→O G1 = x −→x 0 + y −→y 0
x2 + y2 = a2
P. COSSON DYSTR
remarque sur la description des mouvements possibles

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Modelisation Multicorps Indeformable (3/4)
aspect 1 : les efforts moteurs sont connus (”probleme direct”)
determination de la trajectoire de chaque solide
determination des efforts de liaison entre les differents solides pourdimensionner les elements assurant les liaisons entre les solides
⊲ mouvements des differents solides
⊲ efforts entre les solides au niveau des liaisons
Systeme etudie :
ensemble de solides indeformables
efforts exterieurs
connus
efforts imposes
par les
actionneurs
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Modelisation Multicorps Indeformable (4/4)
aspect 2 : les trajectoires sont connues (”probleme inverse”)
determination des efforts moteurs permettant d’obtenir ces trajectoires
determination des efforts de liaison entre les differents solides pourdimensionner les elements assurant les liaisons entre les solides
⊲ efforts a imposer au niveau des actionneurs
⊲ efforts entre les solides au niveau des liaisons
Systeme etudie :
ensemble de solides indeformables
efforts exterieurs
connus
trajectoires imposees
de certains solides
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Postulats de base
Les solides sont indeformables
Espacehomogene - isotrope - euclidien - non modifie par la presence de matiere
Tempscontinu - uniforme - monotone croissant - identique pour tous lesobservateurs
Massecaracteristique de la matiere - positive - invariante
Principe de causalitesi un phenomene nomme ”cause” produit un autre phenomene nomme”effet”, l’effet ne peut avoir lieu avant la cause
Determinismeunicite du mouvement pour des conditions initiales donnees pour toutsysteme physique
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
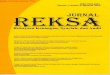
Enonce du Principe Fondamental de la Dynamique - Lois de NEWTON
Il existe un referentiel absolu
defini par
un Repere Absolu Ra
un temps absolu
pour lequel on a quel que soit le systeme materiel Σ considere
“−→f = m−→γ ”
Dans ce Referentiel Absolu, on peut ecrire pour tout point materiel M
M −→γ (M /Ra) =∑ −→
F ext→M
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Problematique du solide non ponctuel en mouvement (1/2)
P. COSSON DYSTR
b P
−→F 1
−→F 2
−→F 3
O
−→x 0
−→y 0
−→z 0
∑−→F ext→P = m−→γ (P /R0)
IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
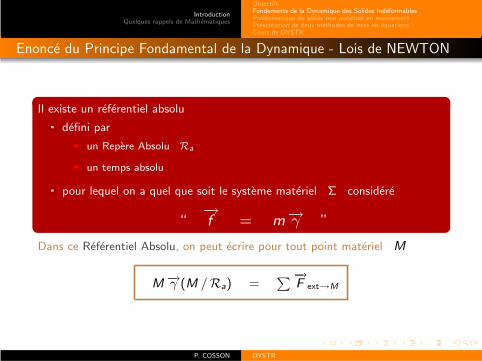
Problematique du solide non ponctuel en mouvement (2/2)
∑−→F ext→bras = m−→γ (G /R0) =
−→0
La somme des forces s’exercant sur la partie mobile est nulle.Pourtant il y a mouvement !!!
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Presentation de deux methodes de mise en equations (1/2)
P. COSSON DYSTR
∫
Σ−→γ (P /R0) dm
∫
Σ
−→AP ∧ −→γ (P /R0) dm
=
∑−→F ext→Σ
−→M(A ,
−→F ext→Σ)
−→Γ 23
−→F 23
−→Γ 12
−→Γ 01
dm
mise en equation par le Principe Fondamental de la Dynamique

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Presentation de deux methodes de mise en equations (2/2)
P. COSSON DYSTR
δ−→u (P /R0)
δA =∫
Σ−→γ (P /R0) . δ−→u (P /R0) dm = δW
−→Γ 23
−→F 23
−→Γ 12
−→Γ 01
dm
mise en equation par le Principe des Travaux Virtuels

IntroductionQuelques rappels de Mathematiques
ObjectifsFondements de la Dynamique des Solides IndeformablesProblematique du solide non ponctuel en mouvementPresentation de deux methodes de mise en equationsCours de DYSTR
Organisation du cours de DYSTR
Mise en equations
Description du mouvement : parametrage, cinematique
Description des efforts - Liaisons entre solides
Principe Fondamental de la Dynamique
Principe des Travaux Virtuels
Resolution
Resolution dans le cadre de l’hypothese des petits mouvements - Mecaniquedes Vibrations
[M]
X
+ [B]
X
+ [K ]X = F (t)
Resolution dans le cas general - Methodes numeriques
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Definition d’un espace vectoriel sur R
ensemble muni
d’une loi de composition interne, notee +∀ (a, b) ∈ E × E , a + b ∈ E
d’une loi de composition externe∀ a ∈ E et ∀ λ ∈ R , λ a ∈ E
−→x 0
−→y 0
−→a
−→b
−→a +−→b
A
BC −→w
λ−→w
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Dimension d’un espace vectoriel (1/2)
Soit V la famille (V1 , . . . Vi . . . , Vn) d’elements de E .
La famille V est une famille libre de l’espace vectoriel E si etseulement si
n∑
i=1
αi Vi = 0 ⇐⇒ αi = 0 ∀ i = 1 , . . . , n
La famille V est une famille generatrice de l’espace vectoriel E si etseulement si
∀ a ∈ E ∃(α1 , . . . , αn) ∈ Rn / a =
n∑
i=1
αi Vi
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Dimension d’un espace vectoriel (2/2)
E est un espace vectoriel de dimension finie si il existe une famillegeneratrice de dimension < ∞ .
Soit E un espace vectoriel de dimension finie. La dimension de E estdonnee par
la dimension de la plus grande famille libre d’elements de E
la dimension de la plus petite famille generatrice de E
Remarque : dans un espace vectoriel E de dimension 1 2 ou 3, quand ils’agit de l’espace vectoriel associe a un espace de points geometriques(droite, plan, espace), il est usuel de noter les elements de E
−→a
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
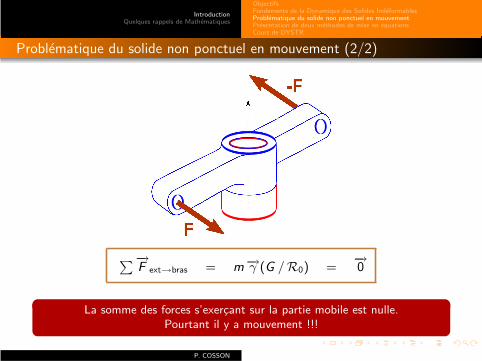
Base d’un espace vectoriel (1/2)
Soit E un espace vectoriel de dimension n . La famille V constituee desvecteurs (V1 , . . . Vi . . . , Vn) est une base de E si et seulement si toutelement de E est une combinaison lineaire des elements de V .
(V1 , . . . Vi . . . , Vn) ∈ En est une base de E
m
∀ α ∈ E , ∃(α1 , . . . αi . . . , αn) ∈ Rn / α =
n∑
i=1
αi Vi
(αi )1 ≤ i ≤ n sont les composantes du vecteur α sur la base V .
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Base d’un espace vectoriel (2/2)
Soit E un espace vectoriel de dimension n , (V1 , . . . Vi . . . , Vn) unebase de E . Tout element de E est parfaitement defini par la donnee de sescomposantes sur la base (V1 , . . . Vi . . . , Vn) . On notera
[ α ](V1 , ...Vi ... , Vn) =
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
α1
...
αi
...
αn
avec α =n
∑
i=1
αi Vi
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Orientation de l’espace
Soit E l’espace vectoriel de dimension 3 associe a l’espacedes points geometriques
regle du ”bonhomme d’Ampere”
regle du ”tire-bouchon”
regle des ”trois doigts de la main droite”
P. COSSON DYSTR
−→ı
−→−→k
−→e 1
−→e 2−→e 3
−→r 1
−→r 2
−→r 3

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Produit vectoriel (1/2)
Soit E l’espace vectoriel de dimension 3 associe a l’espace des pointsgeometriques , (−→e 1 , −→e 2 , −→e 3) une base orthonormee directe de E .
On appelle produit vectoriel l’application de E × E a valeurs dans Edefinie de la facon suivante :
E × E −→ E
(−→a ,−→b ) 7−→ −→a ∧
−→b
avec
−→a = a1−→e 1 + a2
−→e 2 + a3−→e 3
−→b = b1
−→e 1 + b2−→e 2 + b3
−→e 3
[
−→a ∧−→b
]
(−→e 1 ,
−→e 2 ,
−→e 3)=
∣
∣
∣
∣
∣
∣
∣
∣
a2 b3 − a3 b2
a3 b1 − a1 b3
a1 b2 − a2 b1
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Produit vectoriel (2/2)
interpretation
−→a
−→b
−→a ∧−→b
−→k θ
−→a ∧−→b = ‖−→a ‖ × ‖
−→b ‖ × sin θ ×
−→k
Proprietes
−→a ∧−→b = −
−→b ∧ −→a
−→a . (−→a ∧−→b ) = 0 =⇒ −→a ⊥ −→a ∧
−→b
Resultat−→a ∧ (
−→b ∧ −→c ) = (−→a .−→c )
−→b − (−→a .
−→b )−→c
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Produit mixte
Soit E l’espace vectoriel de dimension 3 associe a l’espace des pointsgeometriques. Le produit mixte est l’application de E × E × E a valeursdans R definie de la facon suivante :
E × E × E −→ R
(−→a ,−→b ,−→c ) 7−→ [−→a ,
−→b ,−→c ] = −→a . (
−→b ∧ −→c )
Propriete
[−→a ,−→b ,−→c ] = [
−→b ,−→c ,−→a ] = [−→c ,−→a ,
−→b ]
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Definition d’une application lineaire
Soient E et F deux espaces vectoriels definis sur R . l’application ude E a valeurs dans F est une application lineaire si et seulement si
∀ (x , y) ∈ E ×E et ∀ (λ, µ) ∈ R×R u(λ x+µ y) = λ u(x) + µ u(y)
Si E est un espace vectoriel de dimension finie egale a n , si(V1 , . . . Vi . . . , Vn) est une base de E , l’application lineaire u estparfaitement definie par la donnee de u(Vi ) pour i = 1 , . . . n .
x =n
∑
i=1
αiVi =⇒ u(x) =n
∑
i=1
αi u(Vi )
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Representation d’une application lineaire par sa matrice (1/2)
Soient E et F deux espaces vectoriels de dimension respective n et m ,u une application lineaire de E a valeurs dans F . On note
(V1 , . . . Vi . . . , Vn) une base de E ;
(W1 , . . . Wi . . . , Wm) une base de F ;
u(Vj) =m
∑
i=1
aij Wi ∀ j ∈ 1 , . . . , n
La matrice [A] de l’application lineaire u est definie par
[A] = [aij ] 1 ≤ i ≤ m et 1 ≤ j ≤ n
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Representation d’une application lineaire par sa matrice (2/2)
[A] =
a1j
amj
u(Vj)
W1
Wm
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Applications lineaires symetriques et antisymetriques (1/4)
Soient E et F deux espaces vectoriels de meme dimension n , u uneapplication lineaire de E a valeurs dans F . On note
(V1 , . . . Vi . . . , Vn) une base de E ;
(W1 , . . . Wi . . . , Wn) une base de F ;
u(Vj) =
n∑
i=1
aij Wi ∀ j ∈ 1 , . . . , n
[A] la matrice de l’application lineaire u
[A] = [aij ] 1 ≤ i ≤ n et 1 ≤ j ≤ n
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Applications lineaires symetriques et antisymetriques (2/4)
l’application lineaire u est une application lineaire symetrique si etseulement si sa matrice [A] est symetrique
[A]t = [A] ⇐⇒ aij = aji ∀ (i , j) ∈ 1 , . . . , n × 1 , . . . , n
l’application lineaire u est une application lineaire antisymetrique si etseulement si sa matrice [A] est antisymetrique
[A]t = − [A] ⇐⇒ aij = −aji ∀ (i , j) ∈ 1 , . . . , n×1 , . . . , n
consequenceaii = 0 ∀ i ∈ 1 , . . . , n
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Applications lineaires symetriques et antisymetriques (3/4)
Soit E l’espace vectoriel de dimension 3 associe a l’espace des pointsgeometriques. On pose
(−→e 1 , −→e 2 , −→e 3) une base orthonormee directe de E
u une application lineaire antisymetrique de E a valeurs dans E
mat [u , (−→e 1 , −→e 2 , −→e 3)] =
0 −r q
r 0 −p
−q p 0
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Applications lineaires symetriques et antisymetriques (4/4)
On note−→Ω le vecteur de E defini par−→Ω = p −→e 1 + q −→e 2 + r −→e 3
ϕ−→Ω
l’application lineaire de E a valeurs dans E definie de la faconsuivante
ϕ−→Ω
: E −→ E
−→a 7−→ ϕ−→Ω
(−→a ) =−→Ω ∧ −→a
Alors
ϕ−→Ω
= u
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Definition d’un espace affine
Soit E un espace vectoriel. L’espace affine E de direction E estl’ensemble verifiant les proprietes suivantes
∀ (A, B) ∈ E × E ∃ !V ∈ E / B = A + V
∀ A ∈ E et ∀ V ∈ E ∃ !B ∈ E / B = A + V
b
b
−→x 0
−→y 0
O
A
B−→a
A + −→a est un point de E
−−→A B est un vecteur de E
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Definition d’un champ vectoriel (1/2)
Soit E un espace affine, E l’espace vectoriel associe. On appelle champ devecteur sur E toute fonction f definie sur E a valeurs dans E .
Exemple
b
b
b
b
−→x 0
−→y 0
O
P
A1
−→F 1
A2
−→F 2
A3 −→F 3
f : E −→ E
P 7−→ f (P) =
3∑
i=1
−−→P A i ∧
−→F i
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Definition d’un champ vectoriel (2/2)
Champ de vecteurs uniformeun champ de vecteurs est dit uniforme lorsque la fonction f estconstante.
Champ de vecteurs affineun champ de vecteurs est dit affine lorsqu’il existe une application lineairede E a valeurs dans E verifiant :
∀ (P , −→x ) ∈ E × E f (P + −→x ) = f (P) + u(−→x )
Champ de vecteurs equiprojectifun champ de vecteurs est dit equiprojectif lorsqu’il verifie
∀ (P , Q) ∈ E2 [ f (Q) − f (P) ] .−→PQ = 0
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Exemple de champ de vecteurs affine et equiprojectif (1/2)
b
bb
b
b
−→x 0
−→y 0
O
P
QA1
−→F 1
A2
−→F 2
A3 −→F 3
f : E −→ E
P 7−→ f (P) =3
∑
i=1
−−→P A i ∧
−→F i
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
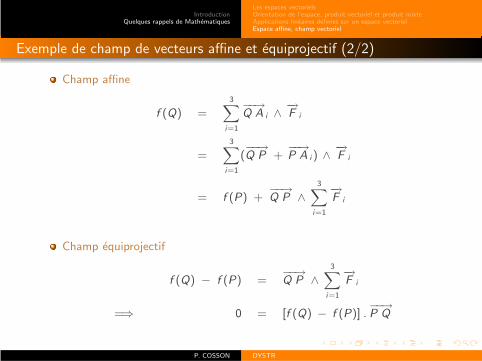
Exemple de champ de vecteurs affine et equiprojectif (2/2)
Champ affine
f (Q) =3
∑
i=1
−−→Q A i ∧
−→F i
=3
∑
i=1
(−−→Q P +
−−→P A i ) ∧
−→F i
= f (P) +−−→Q P ∧
3∑
i=1
−→F i
Champ equiprojectif
f (Q) − f (P) =−−→Q P ∧
3∑
i=1
−→F i
=⇒ 0 = [f (Q) − f (P)] .−−→P Q
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Propriete fondamentale des champs de vecteurs equiprojectifs
Soit f un champ vectoriel equiprojectif de E a valeurs dans E . Alors fest un champ affine et l’application lineaire associee a f est antisymetrique.
demonstration : cf. annexe sur les torseurs disponible sur le serveurpedagogique
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Torseurs (Champs de vecteurs equiprojectifs definis sur un espace dedimension 3)
Cas particulier des espaces affines de points geometriques de direction unespace vectoriel de dimension 3
Soit E un espace affine de points geometriques de direction un espacevectoriel de dimension 3.Soit f un champ de vecteurs equiprojectif. Il existe donc une applicationlineaire u antisymetrique verifiant
∀ (P , −→x ) ∈ E × E f (P + −→x ) = f (P) + u(−→x )
u etant une application lineaire antisymetrique definie sur un espace vectoriel
de dimension 3 , il existe un vecteur−→Ω verifiant
∀ −→x ∈ E u(−→x ) =−→Ω ∧ −→x
Par consequent, si f est un champ de vecteurs equiprojectif sur E , il existe
un vecteur−→Ω de E verifiant
∀ (P , −→x ) ∈ E × E f (P + −→x ) = f (P) +−→Ω ∧ −→x
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Torseurs (Champs de vecteurs equiprojectifs definis sur un espace dedimension 3)
On appelle torseur tout champ equiprojectif de vecteurs defini sur unespace affine E de points geometriques de direction un espace vectorielE de dimension 3
A tout torseur f , on peut associer un vecteur−→Ω de E verifiant
∀ (P , Q) ∈ E × E f (Q) = f (P) +−→Ω ∧
−−→P Q
A etant un point de l’espace affine E , le torseur f est completementdefini par la donnee de
f A =
−→Ω
f (A)
Ω et f (A) sont les elements de reduction du torseur f au point A .
f est defini par six variables au plus.
P. COSSON DYSTR
IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
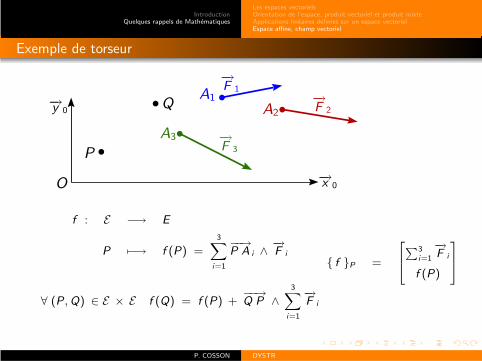
Exemple de torseur
b
bb
b
b
−→x 0
−→y 0
O
P
QA1
−→F 1
A2
−→F 2
A3 −→F 3
f : E −→ E
P 7−→ f (P) =3
∑
i=1
−−→P A i ∧
−→F i
∀ (P, Q) ∈ E × E f (Q) = f (P) +−−→Q P ∧
3∑
i=1
−→F i
f P =
∑3i=1
−→F i
f (P)
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Comoment de deux torseurs (1/2)
Soient f et g deux torseurs ayant pour elements de reduction aupoint A
f A =
−→R
f (A)
g A =
−→S
g(A)
Le comoment des torseurs f et g au point A est defini par
f A ⊗ g A =−→R . g(A) +
−→S . f (A)
ProprieteLe comoment des torseurs f et g est independant du point ou il estcalcule
P. COSSON DYSTR

IntroductionQuelques rappels de Mathematiques
Les espaces vectorielsOrientation de l’espace, produit vectoriel et produit mixteApplications lineaires definies sur un espace vectorielEspace affine, champ vectoriel
Comoment de deux torseurs (2/2)
f B ⊗ g B =−→R . g(B) +
−→S . f (B)
=−→R . (g(A) +
−−→B A ∧
−→S ) +
−→S . (f (A) +
−−→B A ∧
−→R )
=⇒ f B ⊗ g B = f A ⊗ g A + [−→R ,
−−→B A ,
−→S ] + [
−→S ,
−−→B A ,
−→R ]
Or
[−→R ,
−−→B A ,
−→S ] = [
−→S ,
−→R ,
−−→B A ] = (
−→S ∧
−→R ) .
−−→B A
et [−→S ,
−−→B A ,
−→R ] = [
−→R ,
−→S ,
−−→B A ] = (
−→R ∧
−→S ) .
−−→B A
avec −→S ∧
−→R = −
−→R ∧
−→S
d’ou f B ⊗ g B = f A ⊗ g A
P. COSSON DYSTR
Demonstration