Embed Size (px)
Citation preview

www.elsevier.com/locate/physc
Physica C 442 (2006) 9–12
Dynamics of superconductor bearings in a cryogenic failure
Amit Rastogi *, A.M. Campbell, T.A. Coombs
Department of Engineering, Cambridge University, Cambridge CB2 1PZ, UK
Received 23 December 2005; received in revised form 17 March 2006; accepted 28 March 2006Available online 2 June 2006
Abstract
The dynamics of superconductor bearings in a cryogenic failure scenario have been analyzed. As the superconductor warms up, therotor goes through multiple resonance frequencies, begins to slow down and finally touches down when the superconductor goes throughits transition temperature. The bearing can be modelled as a system of springs with axial, radial and cross stiffness. These springs gothrough various resonant modes as the temperature of the superconductor begins to rise. We have presented possible explanationsfor such behaviour.� 2006 Elsevier B.V. All rights reserved.
PACS: 74.25.Ha; 74.25.Qt; 74.81.Bd; 84.71.Ba
Keywords: Superconducting bearings; Levitation; Bearing stiffness and spin-down
1. Introduction
Superconducting bearings have been extensively ana-lyzed to explore their use in high speed machines such asflywheels [1–5] and in low speed devices like gyroscopesfor space applications [6] and micro-electromechanical sys-tems [7]. A distinct advantage of these bearings despitetheir low stiffness is that they are entirely passive, self-damping and incur negligible losses [1]. Many prototypemachines have been proposed wherein a typical set up con-sists of a stator element housing the superconducting pucksand a rotor element carrying reinforced magnetic ringsmade up from NdFeB [2,3]. In most of the designs, thebearings operate at liquid nitrogen temperatures of 77 Kand the superconducting element is field-cooled for opera-tional practicalities. The whole system is housed in a vac-uum chamber to reduce windage losses, to providethermal isolation and it also acts as containment for thespinning rotor. The bearing is expected to be robustenough against thermal and mechanical loads. There have
0921-4534/$ - see front matter � 2006 Elsevier B.V. All rights reserved.
doi:10.1016/j.physc.2006.03.136
* Corresponding author. Address: Aviza Technology, Ringland Way,Newport NP18 2TA, UK. Tel.: +44 1633 414188; fax: +44 1633 414141.
E-mail address: [email protected] (A. Rastogi).
been investigations of the bearing stiffness over a widerange of temperatures and it was reported by Hull et al.[6] that for small amplitudes, the bearing stiffness doesnot change and that the thermal loading below 77 K mar-ginally influences it. However, at higher temperatures theeffects of thermal loading are expected to become morepronounced. In a dynamic situation, the amplitude ofvibrations around the resonant modes of the rotor wouldbe considerably higher. The oscillations due to rotor whirland pitching will affect the balance of forces acting up onthe bearing. Our investigations are focused on the dynam-ics of the bearing during a cryogenic failure. We have con-sidered an extreme case where failure of the vacuum systemas well as the cryogenic cooling leads to a rapid warm up ofthe superconductor elements and a quick slow down of thespinning rotor. This results in the rotor going through itsresonant modes in conjunction with a change of bearingstiffness.
2. Experimental set-up
The bearing is housed in a bell-jar as shown in the pic-ture in Fig. 1. The melt-grown superconducting YBCOdisk with 33 mm diameter and 15 mm thickness is cooled

Fig. 1. A picture of the experimental set-up.
Fig. 2. The bearing modelled as a system of springs.
Fig. 3. Force–displacement curve of a bearing field-cooled at 77 K and aheight of 2 mm.
10 A. Rastogi et al. / Physica C 442 (2006) 9–12
in a liquid nitrogen bath. A ring magnet with 35 mm OD,25 mm ID, a thickness of 8 mm and a surface field of 0.4 Tis fixed to an aluminum holder. This rotor assembly weigh-ing about 64 gm is attached to a load plate and is held by asimilar ring magnet mounted over the shaft. The whole set-up can be moved up and down by a set-up motor. The loadplate is driven by another motor as shown in Fig. 1. Thebell-jar is pumped out to lower the vapor pressure of liquidnitrogen which decreases the temperature below 77 K. Asthe pumping continues, the liquid nitrogen level decreasesand the temperature of the YBCO disk begin to rise. Therate of temperature rise is proportional to the pumpingspeed. The YBCO disk is field-cooled at a distance of2 mm from the ring magnet to levitate the rotor. The rotoris then set spinning and the load plate is moved away leav-ing the rotor levitated and freely spinning. A digital phototachometer monitors the speed of rotation. Rotor speedduring a spin-down is plotted against spin-down time.
The force–displacement measurements were done on acommercially available Instron machine equipped with a250 N load cell and a data acquisition system. Forces aremeasured at various positions of the magnet with respectto the superconducting disk. Stiffness of the bearing canbe estimated from the slope of the force–displacementcurves.
3. Rotor dynamics and bearing characteristics
As mentioned before, in our experiments the rotor is lev-itated by field-cooling the YBCO disk. The bearing thusformed can be modeled as system of springs with its prin-cipal axes x, y and z shown in Fig. 2. The stiffness alongthe three axes is defined by the equation:
½K�y þ ½M �€y ¼ 0
where K and M are the stiffness and mass matrices. Thestiffness matrices are split into various components asfollows:
Kxx Kxy Kxz
Kyx Kyy Kyz
Kzx Kzy Kzz
264
375 �
Kxx 0 Kxz
0 Kxx Kxz
Kxz Kxz Kzz
264
375;
the eigenvalue matrix Keigen ¼K1
K2
K3
264
375
where Kxx, Kyy and Kzz are along the principal axes andKxz, Kzx, Kyz, Kzy, Kyz and Kxy are the cross-couplingterms. For axisymmetric bodies Kxx = Kyy, Kxz = Kyzand Kxy = 0, so we are left with three components viz.Kxx, Kzz and Kxz called radial, axial and cross-couplingstiffness respectively. The values of Kzz and Kxx are esti-mated from the force–displacement curves shown in Figs.3 and 4 and the cross-coupling stiffness Kxz is determinedfrom the axial force vs. radial displacement measurements[9]. At 77 K, Kxx = 0.4 N/mm, Kzz = 2.1 N/mm andKxz = 0.75 N/mm. The stiffness values are related to theresonant frequencies by the equation K ¼ mx2
res where xres
is the angular frequency at resonance. The eigenvalues cal-culated from the above-said stiffness components are

Fig. 4. Radial force vs. lateral displacement curve of a bearing field-cooledat 77 K and a height of 2 mm. Fig. 6. Spin-down and temperature rise curves showing two closely
occurring resonances.
A. Rastogi et al. / Physica C 442 (2006) 9–12 11
K1 = 2.3 N/mm, K2 = 0.75 N/mm and K3 = 0.55 N/mm.When the rotor is spun up and left to coast, it is expectedto pass through these frequencies.
The spin-down time also provides an estimate of thefrictional losses. The slopes of the spin-down curves (df/dt) are related to the coefficient of friction by the followingequation [8]:
l ¼ pR2
gRD
� �dfdt
� �
where R is the radius of the rotor, RD is the radius at whichthe drag force acts and df/dt is the decay rate.
4. Failure analysis
Fig. 5 shows a spin-down curve for a field-cooled bear-ing at 63 K. The first resonance occurs at 30 Hz while thenext resonance is spread around 18 Hz. The two reso-nances correspond to the stiffness values of 2.3 N/mmand 0.82 N/mm and related to the three eigenfrequencies
Fig. 5. Spin-down curve at 63 K.
representing axial, radial and tilt modes. The second reso-nance seems to contain radial and tilt modes as they areexpected to occur very closely [6]. The coefficient of frictionestimated from the decay rate (df/dt = 3.25 · 10�2 s�2) is1.75 · 10�4.
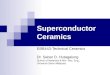
In the next experiment the YBCO disk is warmed upduring the spin-down to simulate cryogenic failure. Fig. 6shows the frequency decay along with the temperature rise.The decay rate in this case was 4.4 · 10�2 s�2, increased byalmost a third of that at a constant temperature of 63 Kbefore the rotor started to drop down around 11 Hz. Thetemperature rise rate was 3.3 K/min. There were two reso-nant frequencies occurring quite closely at 29 and 23 Hz. Inanother experiment shown in Fig. 7 the first resonance wasobserved at 32 Hz and as the temperature rose at a rate of6 K/min, two more resonances were observed at 26 Hz and18 Hz. The decay rate in this case was 6.3 · 10�2 s�2,almost double the rate at a constant temperature. In thefinal experiment shown in Fig. 8 the superconductorstarted warming up just before the resonance at a rate of
Fig. 7. Spin-down and temperature rise rate curves. Three resonanceswere observed at 18, 26 and 32 Hz.

Fig. 8. Spin-down and temperature rise rate curves. A broad resonancewas observed between 18–30 Hz.
Fig. 9. Force–displacement curves at 2, 5, 10 and 15 Hz for a field-cooledbearing at 77 K.
12 A. Rastogi et al. / Physica C 442 (2006) 9–12
7.4 K/min. The decay rate in this case was 6.9 · 10�2 s�2
and we observed a resonance width of more than 10 Hz.
5. Discussion
The dynamics of the bearing can be explained by con-sidering a system of springs. The stiffness componentsalong the axial (Kzz), radial (Kxx) and cross-coupling(Kxz) are related to the corresponding resonant frequen-cies. These components must be independent of the tem-perature of the superconductor forming the bearing aslong as the amplitudes of vibrations are small [9]. We haveobserved that the rotor goes through a broad resonancespread over 10 Hz or more and up to three resonancesbefore touching down at the critical transition temperaturearound 90 K.
During the resonance, the levitated rotor wobbles overthe superconductor and this wobbling is similar to a mag-net vibrating with a certain frequency over the supercon-ductor. In an experiment to simulate wobbling a similarmagnet was set vibrating in vertical direction for 500 cyclesat different frequencies with an amplitude of 0.25 mm overa superconductor which had been field-cooled at 77 K andat a height of 2 mm. Fig. 9 shows force–displacementcurves for 2, 5, 10 and 15 Hz. The experiment was per-formed on the Instron machine. During 500 cycles, forceswere measured against the vertical positions of the magnet.For clarity, the data for the first five cycles are presented.The purpose of this experiment is to show that if the mag-net wobbles with a higher frequency during resonance, thestiffness decreases from a nearly static value of 2.6 N/mm(at 2 Hz) to 1.55 N/mm at 15 Hz. This decrease would befurther amplified by the increasing temperature. Appear-ance of multiple resonances during warm up suggests asudden change in the stiffness of the bearing.
The trapped flux produces a restoring force along theradial direction and for small amplitudes of displacement
this force is elastic for small amplitudes of displacement.As the amplitudes approach a critical value dependent onthe critical current densities, this force enters a hystereticregime [10] and the trapped flux is displaced from its pin-ning position. During resonance, alongside this effect, ifthe temperature of the superconductor is also increasing,the trapped flux begins to soften allowing higher ampli-tudes of displacement and pushing the restoring force intothe hysteretic regime. This shows up as a frictional loss inthe spin-down curves in Figs. 5–8 and also reduces the lat-eral stiffness of the bearing.
Our investigations have shown that during a failure, therotor goes through various modes of resonance induced bychanging stiffness before it touches down. The frictionallosses increase with the increase in rate of temperature.
Acknowledgement
The authors would like to thank EPSRC, UK for sup-porting this work.
References
[1] J.R. Hull, Supercond. Sci. Tech. 13 (2000) R1.[2] P. Kummeth, W. Nick, G. Ries, H.-W. Neumuller, Physica C 372–376
(2002) 1470.[3] N. Koshizuka et al., Physica C 378–381 (2002) 11.[4] T.A. Coombs, A.M. Campbell, R. Storey, R. Weller, IEEE Trans.
Appl. Supercond. 9 (1999) 831.[5] A. Rastogi, T.A. Coombs, A.M. Campbell, IEEE Trans. Appl.
Supercond. 15 (2005) 2242.[6] J.R. Hull, S. Hanany, T. Matsumara, B. Johnson, T. Jones,
Supercond. Sci. Tech. 18 (2005) S1.[7] T.A. Coombs, I. Samad, D. Ruiz-Alonso, K. Tadinada, IEEE Trans.
Appl. Supercond. 15 (2005) 2312.[8] A. Rastogi, D.R. Alonso, T.A. Coombs, A.M. Campbell, IEEE
Trans. Appl. Supercond. 13 (2003) 2267.[9] J.R. Hull, A. Canzis, J. Appl. Phys. 86 (1999) 6396.
[10] T.H. Johansen, H. Bratsberg, Z.J. Yang, S.J. Guo, B. Loberg, J.Appl. Phys. 70 (1991) 7496.