Embed Size (px)
Citation preview

Dynamics and Control of a Six Degrees of Freedom
Ground Simulator for Autonomous Rendezvous and
Proximity Operation of Spacecraft
Sasi Prabhakaran Viswanathan1, Amit Sanyal 2 and Lee Holguin 3
Department of Mechanical and Aerospace Engineering,
New Mexico State University, Las Cruces, NM,88001-03
Ground simulation of spacecraft motion simulating all six degrees of freedom is
a challenging problem due to several features of the natural dynamics in space that
are difficult to reproduce on ground. Unlike terrestrial (aerial, land or underwater)
vehicles, space vehicles have an overwhelmingly large percentage of their total energy
in their translational motion. Dynamical coupling between the translational and rota-
tional degrees of freedom can significantly affect the attitude motion of spacecraft. The
attitude motion is particularly important for a spacecraft tasked to autonomously ren-
dezvous and capture or dock with a target object in space. Here we present a ground
simulator design for 6 DOF simulation of spacecraft engaged in autonomous rendezvous
and proximity operation(ARPO) with an unaided target space object. These opera-
tions are very risky and difficult to carry out in space, since the target’s motion is
not well known in advance. Ground simulation using 6 DOF motion simulation capa-
bilities can help reduce the risk of actual on-orbit ARPO missions. The novel design
"Autonomous Rendezvous and Proximity Operation ground Simulator (ARPOS)" pre-
sented here mimics all the six DOFs of rigid spacecraft with high fidelity. ARPOS has
the advantage of linear and spherical air bearings to reproduce the near frictionless
environment of an actual spacecraft in space.
1 Graduate Student, Department of Mechanical and Aerospace Engineering, [email protected] Assistant Professor, Department of Mechanical and Aerospace Engineering, [email protected] Graduate Student, Department of Mechanical and Aerospace Engineering, [email protected].
1
AIAA Guidance, Navigation, and Control Conference13 - 16 August 2012, Minneapolis, Minnesota
AIAA 2012-4926
Copyright © 2012 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Nomenclature
b = position vector of the pursuer spacecraft in a geocentric inertial frame
R = rotation matrix representing the attitude of the pursuer
� = translational (orbital) velocity of the pursuer in its body coordinate frame
= rotational (orbital) velocity of the pursuer in its body coordinate frame
�0 ! superscript ( b0, R0, �0, 0, b0g) represents target object or target spacecraft
a = (b0-b) relative inertial position vector of the target from the pursuer
x = (RT a) relative position vector expressed in the pursuer’s body frame
Q = (RTR0) attitude of the target resolved in the pursuer’s body frame
v = �0-QT (�+xx ) relative translational velocity of the target with respect to the
pursuer in the target’s body frame
! = (0-QT) relative angular velocity of the target with respect to
the pursuer in the target’s body frame
!g = angular velocity of the spacecraft model mounted on the ground simulator with respect to
the simulator base
g = angular velocity of the spacecraft model mounted on the ground simulator with respect to
ground reference frame
mb = mass of spacecraft model stage of the simulator
J b = moment of inertia of spacecraft model stage of the simulator
�g = angular momentum of the spacecraft model stage in the body frame
bg = position vectors of the centers of support of the two supported bodies in their corresponding
simulator supports in a lab-fixed inertial frame
x g = relative position between pursuer and target ARPOS expressed in inertial frame
2
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

I. Introduction
Various autonomous on-orbit operations such as assembly of large space structures, resupply
of orbital platforms and stations, exchange of crew in orbital stations [1], re-orbiting an orbiting
vehicle and On-Orbit Servicing [2] (OOS) can be grouped under Autonomous Rendezvous and
Proximity Operations (ARPO). An OOS task comprises of retrieval, reorienting and refueling of
target spacecraft [1][2]. Simulating the rendezvous and capture of tumbling spacecraft on ground
prior to an actual unaided ARPO mission is helpful in understanding real-time problems in motion
control, state estimation and guidance. Design and testing of control algorithms for spacecraft
through realistic simulation on the ground is technically challenging. The challenges include the
complexities of spacecraft dynamics with several nonlinearly coupled degrees of freedom of motion
and their energy distribution, the difficulty of obtaining global control schemes due to the non-linear
state space of motion and the presence of uncertainties in dynamics and measurements.
In this paper, we only consider realistic simulation of the dynamics with control inputs when the
dynamics models of both the pursuer and the target spacecraft are known and the measurements
are assumed to be accurate. The degrees of freedom (DOFs) for a multi-body spacecraft consist of
three translational degrees of freedom, three rotational or attitude degrees of freedom and internal or
shape degrees of freedom. Internal DOFs could include configuration variables of internal actuators
like reaction wheels, control-moment gyroscopes and proof mass actuators, as well as structural
vibration modes. Ground simulators that are designed to simulate partial or full range motion of
spacecraft have been in existence for several years. An excellent review of spacecraft simulators
using air-bearing supports is given in [3]. Spherical air-bearing testbeds, which provide a large
range of torque-free 3D attitude motion, have been used to test attitude maneuvers and attitude
control design [4–7]. Air-bearing pad that allows frictionless planar translational motion, have also
been used to demonstrate ARPO and formation flying maneuvers in ground tests [8–12].
Most of these simulations can be grouped into two categories:(1) those that can only simulate
attitude and internal motion since they are mounted on stationary support; and (2) those that
can only simulate planar motion since they constrain the spacecraft model to move on a plane.
However, the dynamics of a spacecraft model on such ground simulators is very different from that
3
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

of spacecraft in planetary orbit. Even the equilibria are different in these two situations, as can be
seen by comparing the dumbbell spacecraft model in central gravity [13–15] to the dumbbell model
in an attitude control simulator [16, 17]. The main problem with air-bearing tables is that they are
limited to simulating planar motion, which is adequate only for simulating the motion of spacecraft
in co-planar Keplerian orbits. Moreover, the planar translational motion does not lead to the same
dynamical coupling between translational and attitude motion as the 3D motion in space, as pointed
out in [8]. Agarwal et al. and Tsiotras et al. designed and developed 3 DOF and 5 DOF ground
simulators, respectively; to study spacecraft attitude dynamics, but these simulators cannot simulate
all the complex dynamic coupling between the several DOFs of spacecraft. Robotic manipulators
have also been used for simulating spacecraft motion in formation flying, with a spacecraft model
fixed to the manipulator arm, as in [18]. These robotic manipulators can simulate limited ranges of
3D translational motion and 3D attitude motion, but are susceptible to disturbances due to ground
vibrations and vibrations in the manipulator arm.
For spacecraft dynamics, the translational degrees of freedom contain most of the total energy of
motion. However, the nonlinear dynamics of a spacecraft in central gravity leads to complex dynamic
coupling between its translational, attitude and internal degrees of freedom. This dynamic coupling
in turn leads to energy transfer between these different degrees of freedom. The high percentage
of total energy in the translational DOFs implies that translational motion is not substantially
affected by energy transfer from and to the attitude and shape DOFs. On the other hand, such
energy transfer between the DOFs can significantly affect the attitude and internal motion. Changes
in the translational energy can significantly affect both attitude and internal motion, as seen during
atmospheric entry. Ground simulators designed to realistically simulate spacecraft motion need to
account for these facts. There are existing spacecraft ground simulators that can simulate 6 DOF
(translational and attitude) motion of spacecraft, like the one presented in [19]. For simulation
of ARPO between two satellites in orbit, the relative attitude motion of the spacecraft is more
important than the relative translational motion. This is because the relative translational motion
is primarily dictated by the orbital motions of the two satellites, while the relative attitude motion
is controlled to achieve desired proximity maneuvers. We present a novel design concept for a 6
4
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

DOF spacecraft ground simulator that can simulate the complex dynamical interactions between
the different degrees of freedom and can be used to test spacecraft control algorithms.
II. Dynamics of pursuer and tumbling target spacecraft
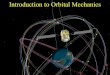
The target spacecraft is assumed to be non-cooperative with the pursuer and moves with un-
constrained motion in an orbit. The pursuer is tasked to rendezvous with the target as shown in
the Figure 1. At the terminal stage, the pursuer approaches the target in close proximity without
any relative motion between the two.
Fig. 1 Pursuer spacecraft chasing a tumbling target spacecraft
The global configuration of the pursuer spacecraft and target object is given by their respective
position vectors and orientations with respect to an inertial (reference) coordinate frame. Orienta-
tion is described by the rotation matrix transformation from a body-fixed coordinate frame to the
inertial coordinate frame; this gives a global and unique representation of the attitude motion. The
body coordinate frames for both the pursuer and the target have origins at their respective centers
of mass.
5
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

The translational and attitude motion kinematics for the two spacecraft are described as follows:
_b = R�; _R = R�; (1)
_b0 = R0�0; _R0 = R00�: (2)
In the above equations, (�)� denotes the skew-symmetric matrix corresponding to the linear cross-
product operator for 3D vectors; i.e., v�1 v2 = v1 � v2 for v1; v2 2 R3. Let m and J denote the
mass and inertia tensor of the pursuer spacecraft respectively, and let m0 and J0 denote the mass
and inertia tensor of the target object. The inertia tensors of both bodies are expressed in their
respective body frames. The dynamics of the pursuer spacecraft is expressed as:
m _� = m� � + Fg(b; R) + �c + �d; (3)
J _ = J� +Mg(b; R) + �c + �d; (4)
where �c; �c are the control force and control moment respectively, and �d; �d are the non-
conservative force and moment (respectively) acting on the pursuer spacecraft. The gravity force is
denoted by Fg(b; R) and the gravity gradient moment is given by Mg(b; R). The dynamics of the
target object (in its body coordinate frame) is expressed as:
m0 _�0 = m0�0 � 0 + F 0g (b0; R0) + �0g; (5)
J0 _0 = J00 � 0 +M0g (b0; R0) + �0g ; (6)
where �d0 and �d0 are the non-conservative force and moment on the target object. F 0g (b0; R0)
and M0g (b0; R0) are the gravity force and gravity gradient moment, respectively, acting on the
target. The non-conservative force and moment include the effects of gravity, atmospheric, solar,
and magnetospheric effects. Note that all forces and moments acting on these two bodies are resolved
in their respective body coordinate frames. It is assumed that there are no control inputs to the
target’s motion and the target is not communicating with the pursuer.
Relative Dynamics
Prior to autonomous rendezvous, the two spacecraft are assumed to be in proximity such that
the relative attitude of the target can be resolved in the pursuer’s body frame. For ease in design of
6
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

the control and estimation schemes, the relative motion between the pursuer and target spacecraft
are resolved in the body frame of the pursuer. To achieve the objectives of tracking the target
object’s motion, we assume that we have a guidance algorithm for the chaser that directs the chaser
to close in on the target and maintain a constant relative pose (position and orientation) with respect
to the target after a period of time from the start of the maneuver. This guidance algorithm provides
a desired or referenced state trajectory for the chaser spacecraft based on remote measurements of
the instantaneous states of motion of the target. For example, the guidance scheme given in [20],
creates a reference trajectory which the chaser tracks to reach the desired end state relative to the
target. In this paper, the desired end state is considered to be the target’s state after a given time
period from the start of the maneuver. The reference states of the chaser satellite is represented
using the following representations of SE(3) and se(3):
gr =
2664Rr br
0 1
3775 2 SE(3) and �r =
2664�r �r
0 0
3775 2 se(3); (7)
where the lower-left entry 0 on both matrices above denotes a row vector of three zeros. The
above representation is similar to the so-called Denavit-Hartenberg representation of transformations
between links in a chain of links in robots [21].
A subscript (�)r is used to denote a reference trajectory value for the chaser. Therefore, the
kinematics of the reference trajectory on SE(3) can be obtained as:
_gr = gr�r (8)
Let the target configuration at time tk = (k � 1)s, (s! time step) be represented by
g0k =
2664R0k b0k
0 1
3775Likewise, the pursuer’s configuration at time tk is
gk =
2664Rk bk
0 1
3775Define hk 2 SE(3) such that it describes the relative configuration between the chaser’s reference
configuration at time tk and the target’s configuration at time tk+1, as follows:
hk = g�1k;rg
0 (9)
7
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

To initialize this guidance scheme, we set the initial reference states of the chaser to be equal to
the chaser’s actual states at time t0; This method of initialization of the guidance scheme ensures
that there are no initial high transient control efforts generated by the feedback tracking scheme.
With the definitions of the tracking errors given in the nomenclature, we obtain a left-invariant
“error kinematics" on SE(3) as given by:
_q = q�; where q =
2664Q x
0 1
3775 and � =
2664!� �
0 0
3775 : (10)
These are trajectory tracking errors between the chaser’s desired (reference) state trajectory and its
actual states at a time instant in the interval [t0; tf ].
III. Autonomous Rendezvous and Proximity Operation ground Simulator [ARPOS]
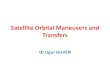
To simulate the complex dynamical interactions between the different degrees of freedom of
motion in a spacecraft with high fidelity, the proposed ground simulator, "Autonomous Rendezvous
and Proximity Operation ground Simulator (ARPOS)" presented here is composed of three stages,
namely (A) Planar Motion Stage, (B) Vertical Translation Stage (translational only), and (C) 3D
Attitude Stage as shown in the Figure 2. This design combines salient features of spherical air-
bearings and linear air-bearing tables to provide 3D translational and 3D rotational (attitude)
motion within hardware limits in limited laboratory floor space. This design is to facilitate: (a)
the realistic simulation of relative spacecraft motion during ARPO using ground experiments, and
(b) the design and testing of spacecraft control and navigation algorithms for ARPO through such
ground simulations. To meet the overall objectives, we ensure in our design that the complex
dynamical interactions between the different degrees of freedom of motion in a spacecraft in orbit
is closely emulated in our ground simulator design.
A. Planar Translation Stage
The planar motion stage serves as the mobile base and physically forms the lower part of
ARPOS. The remaining systems and sub-systems are built on this base platform. The entire system
sits on the horizontal stage and is allowed to float over a thin film of air on a smooth granite surface.
Three linear air bearing pads mounted rigidly to the base platform in a triangular configuration are
8
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Fig. 2 Schematic rendering of ARPOS showing its stages
powered by compressed air from three air tanks connected in series, providing near frictionless
smooth motion of ARPOS. The air tanks are secured and harnessed to each of the three linear
actuators, which provides the advantage of maintaining the ARPOS body symmetric about its
planar rotation axis and facilitates uniform mass distribution due to constant air discharge. The
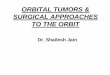
rotational and translational motion of ARPOS’ lower stage (horizontal and vertical traversing stages)
is achieved using three fan thrusters fixed to the base platform in a triangular configuration as in the
Figure 3. This linear stage can be independently controlled for planar translational and rotational
motion using a simple control scheme, which is described in the later sections.
B. Vertical Translation Stage
The vertical traversing stage of ARPOS is designed to provide vertical translation of the sus-
pended body along Z-axis. Three motorized linear actuators are rigidly fixed to the base platform
in a triangular configuration as in Figure 4, to take the load of the attitude stage (spherical bearing
and supported spacecraft model). The advantage of having linear actuation mechanism instead
9
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Fig. 3 Thruster configuration of the planar stage
of pneumatic mechanism is because of its finer resolution in the vertical translation motion and
weight reduction. ARPOS vertical translation stage does not need any gravitational force balancing
mechanism as in [19], since uniform gravity moment is counteracted by the active control scheme.
The vertical motion of all the three linear actuators is synchronized so that the vertical motion of
attitude stage is balanced.
C. Attitude Stage
The attitude stage of ARPOS is further sub-divided into:
1. Spherical Air-Bearing Stage
The spherical air-bearing would be mounted on vibration dampers as shown in the Figure 5 to
overcome any external disturbances caused by the motors of the linear actuator. These dampers
are fixed to the moving part of the linear actuator so that the spacecraft model suspended on the
spherical air bearing translates vertically. The spherical air bearing stage is fueled by pressurized
air from one tank located at the mobile platform, symmetric about the planar stage rotational axis.
10
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Fig. 4 Vertical Translation Stage
Fig. 5 Spherical air-bearing stage
2. Interchangeable Spacecraft Model Stage
A dumbbell-shaped spacecraft model found in ARPOS’s attitude stage as in the Figure 6, can
simulate 3D attitude motion and internal motion. The spherical air-bearing which supports the
interchangeable dumbbell-style spacecraft model allows full freedom in yaw and roll motion, and
11
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

a limited range of pitch motion. The spacecraft model stage has reaction wheels to produce the
Fig. 6 Attitude Stage of ARPOS
required attitude with its control unit mounted at one of its side plate. As the spacecraft model has
all the 6 DOFs of attitude and translational motion, the ARPOS simulator can mimic the dynamics
of a spacecraft in planetary orbit [22]. Mass and inertia properties of ARPOS’s spacecraft model
can be set to desired values by adjusting the weights on the side plate. So, the same simulator
can be used for testing different configuration. The spacecraft model is balanced by adjusting the
counter weights on either side of the side plates, which ensures stable equilibrium when the center
of gravity lies below the center of rotation [23].
IV. Experimental Testbed
Ground simulation of ARPO can be performed using ARPOS in a sophisticated experimental
testbed as in the Figure 7. The testbed is made of flat circular granite disk, leveled parallel to
the ground and mounted rigidly. The circular testbed provides enough surface area to perform the
ARPO experiments in laboratory environment. Two non-identical ARPOS simulator (differentiated
only by colors), are allowed to float on the granite surface, considering one as the target and the
other as chaser. Target ARPOS can be set to follow feasible motion on the granite surface to
any desired attitude and translational parameters. Chaser ARPOS is allowed to navigate the target
12
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Fig. 7 ARPOS Experimental Testbed
based on the tracking trajectory given by the guidance scheme to rendezvous and maintain a relative
position with respect to the target.
V. Dynamics of ARPOS
A. Attitude Dynamics of Simulator
Simulating the attitude dynamics of a spacecraft in orbit through ground simulations is more
challenging than simulating the relative translational dynamics for two spacecraft with a small
relative velocity (as expected during rendezvous and docking), since the attitude motion has strong
nonlinearities. Here we briefly describe how the proposed spacecraft simulator would simulate the
attitude dynamics of a spacecraft in orbit. For simplicity, we assume that the spacecraft model
mounted on the simulator can be modeled as a rigid body. Let mb > 0 and Jb 2 R3�3 > 0 denote
the mass and moment of inertia matrix for this spacecraft model. The configuration of the mobile
base of the simulator, which executes planar motion on the ground, can be expressed in terms of the
inertial position of its center of mass and its attitude angle � in its plane of motion. Let Rg denote
the attitude of the supported spacecraft model, given by the rotation matrix from a body-fixed
coordinate frame to the mobile base coordinate frame, and let !g 2 R3 be the corresponding body
angular velocity measured in the body-fixed frame by rate gyros. The attitude kinematics of the
13
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

supported model is then given by
_Rg = Rg!�g ; (11)
The attitude dynamics equations of motion for the supported model are:
_� = �� !g where � = RTg e3;
_�g = �g � (!g + _��) +mbg�� �+ �u;
(12)
where �g = Jb(!g + _��) is the angular momentum of the supported body in the body frame,
e3 = [0 0 1]T 2 R3 is the unit vector denoting the direction of gravity in inertial frame, g is
the acceleration due to gravity, � is the body vector from the center of support to the center of
mass, and �u 2 R3 is the control moment applied to the supported spacecraft model. The vector
� is the direction of gravity expressed in the body frame. Note that we do not assume that the
spacecraft model is mass-balanced on the spherical air-bearing support such that the center of mass
coincides with the center of support. This is a common assumption in spherical air-bearings used
for spacecraft attitude motion simulation, but is known to be difficult to achieve in practice [24].
The proposed ARPOS simulator design does not impose this constraint on the spacecraft model
being supported.
B. Translational Dynamics of Simulator
A brief description of how two ARPOS simulators would simulate the relative translational
motion between two spacecraft, with one simulating a pursuer spacecraft and the other simulating
a target, is provided here. Let bg 2 R3 and b0g 2 R3 denote the position vectors of the centers of
support of the two supported bodies in their corresponding simulator supports in a lab-fixed inertial
frame, where b0g is the position of the body representing the target and bg is the position of the
body representing the chaser. We assume that we have feedback of the target body’s position and
velocity relative to the chaser, as is the case in an unaided docking or capture maneuver. Let the
orientation of the mobile base of the chaser body in the lab-fixed inertial frame be
R� =
26666664cos � � sin � 0
sin � cos � 0
0 0 1
37777775 ;
14
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

where � is measured counter-clockwise from the inertial x-axis. Let �g 2 R3 and vg 2 R3 denote the
translational velocity of the supported body simulating the chaser, represented in the body frame
of the simulator base and in the inertial frame respectively. Then we have
vg = R��g; or �g = RT� vg: (13)
If xg = bg � b0g denotes the relative position between the ARPOS supported bodies in the inertial
frame, then the relative velocity is:
_xg = _bg � _b0g = R��g � v0g ; (14)
where v0g = _b0g is the translational velocity of the target body represented in the inertial frame, which
can be obtained from the measured (or estimated) relative velocity of target body with respect to
the chaser body, and the known velocity of the chaser simulator. Note that the velocities vg and v0g
have z-components that are separately actuated by the vertical traversing stages of the two ARPOS
simulators.
VI. ARPOS Attitude and Translational Control
A. Attitude Control
In contrast to the ARPOS attitude dynamics (12), the attitude dynamics of a rigid spacecraft
is given by equation (4) if the spacecraft is controlled (chaser spacecraft) or equation (6) if the
spacecraft is not controlled (target spacecraft). In general, the attitude dynamics of a rigid spacecraft
can be written as
_�s = �s � s +Mg(b; R) + �c + �d; (15)
where �s = Jss, Js is the spacecraft moment of inertia matrix, s is the total angular velocity of
the spacecraft in its body frame, Mg(b; R) is the gravity gradient moment, �d is the sum of other
external moments, and �c is the control torque applied to the spacecraft. Here we assume that we
know these quantities; in particular, the control torque may be obtained from a known control law.
Note that s contains coupling terms from the translational (orbital) motion of the spacecraft due
to the orbital angular velocity. The idea behind simulating the attitude dynamics with the proposed
15
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

simulator is to ensure that the total angular velocity of the supported spacecraft model approaches
the angular velocity of the orbiting spacecraft being simulated, i.e., !g + _��! s.
Since the attitude � of the planar motion stage can be independently controlled, _� and �u can be
controlled so that the attitude dynamics (12) is as close to the attitude dynamics (15) as desired. The
following result gives a control scheme for the attitude dynamics of an ARPOS simulator tracking
the attitude dynamics of a controlled chaser spacecraft.
Theorem 1. The control laws
�u = L(s � !g � _��) + Jb(!�g s) +Mg(R) + �0 + �c �mbg���; (16)
_� = 0; (17)
ensure that the angular velocity !g + _�� of the supported body in ARPOS tracks s asymptotically.
Proof: Define the total angular velocity of the supported body on the simulator as
g = !g + _��: (18)
We use the candidate Lyapunov function
V =1
2(g � s)
TJb(g � s): (19)
Taking a time derivative of this function and substituting the attitude dynamics equations (12) and
(15), as well as the control law (16), we get
_V = �(g � s)TL(g � s) + _��T
hJb(g � s)� s
i: (20)
Substituting the angular velocity control law (17) in the expression (20), we get
_V = �(g � s)TL(g � s); (21)
which is negative definite in the angular velocity error. This proves the result.
According to the control law (17), the planar motion stage (base) can have a constant planar
attitude (zero turn rate _�). Note that this design eliminates dynamical coupling from the attitude
motion of the supported body to the translating base, but keeps the coupling from the translation to
the attitude motion of the supported body.
16
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

B. Translational Control
For translational control of the ARPOS ground simulators, we consider a maneuver in which
the chaser positions itself at a constant relative position from the target as a precursor to docking
or capture maneuvers. Let this desired constant relative position vector be denoted p. A simple
velocity control law to achieve this positioning is given by:
_xg = vg � v0g = � (xg � p) ) vg = v0g � (xg � p); (22)
where > 0 is a constant scalar gain. This can then be converted to a force control law in the body
frame of the chaser simulator’s mobile base, as follows:
f = mRT� _vg = mRT
� ( _v0g � _xg); (23)
which requires knowledge of the acceleration _vg0 of the target. Substituting for _X from (22), this
control law can be expressed as
f = mRT�
�_v0g � 2(xg � p)
�: (24)
The acceleration _v0g can be estimated from the observed velocity of the target simulator when sim-
ulating unaided (uncooperative) capture. The force control law (24) gives the x- and y-components
force (body-frame), on the planar motion stage of the simulator. The z-component of f is the force
provided to the vertical traversing stage for the vertical motion of the attitude stage and supported
body.
VII. Conclusion
This paper describes a ground simulator design and simulator control laws for simulating au-
tonomous rendezvous and proximity operations (ARPO) of spacecraft. The simulator and control
laws can be used to realistically simulate six degrees of freedom motion of rigid spacecraft engaged
in ARPO during ground simulations. Control laws for controlling relative translational motion
between a target and a chaser spacecraft, and the attitude motion of the spacecraft, ensure that
the spacecraft models supported by these simulators can accurately mimic the motion of spacecraft
engaged in ARPO. Future extensions of this work will be to supplement these control laws with guid-
17
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

ance and navigation schemes for closed-loop control of these simulators during ground simulations
of spacecraft ARPO.
Reference
[1] Fehse, W., Automated Rendezvous and Docking of Spacecraft [Cambridge Aerospace Series] , Cambridge
University Press, 2003.
[2] King, D., “SPACE SERVICING: PAST, PRESENT AND FUTURE,” Proceeding of the 6th Interna-
tional Symposium on Artificial Intelligence and Robotics Automation in Space, AIAA, Canada, 2001.
[3] Schwartz, J., Peck, M., and Hall, C., “Historical Review of Air-Bearing Spacecraft Simulators,” AIAA
Journal of Guidance, Control and Dynamics, Vol. 26, No. 4, 2003, pp. 833–842.
[4] Shen, J., McClamroch, N. H., and Bloch, A. M., “Local Equilibrium Controllability of the Triaxial
Attitude Control Testbed,” 2002, pp. 528–533.
[5] Shen, J., Sanyal, A. K., and McClamroch, N. H., “Asymptotic Stability of Multibody Attitude Systems,”
Stability and Control of Dynamical Systems with Applications, Boston, 2003, D. Liu and P. J. Antsaklis,
Eds., Birkhäuser.
[6] Agrawal, B. and Rasmussen, R., “Air-Bearing Based Satellite Attitude Dynamics Simulator for Control
Software Research and Development,” Proc. SPIE Conference on Technologies for Synthetic Environ-
ments, 2004, pp. 204–214.
[7] Kim, B.-M., Velenis, E., Kriengsiri, P., and Tsiotras, P., “Designing a Low-Cost Spacecraft Simulator,”
IEEE Control Systems Magazine, 2003.
[8] Tasker, F. and Henshaw, C. G., “Managing Contact Dynamics for Orbital Robotic Servicing Missions,”
AIAA SPACE 2008 Conference and Exposition, San Diego, CA, Sept. 2008.
[9] Yoshida, K., “Engineering test satellite VII flight experiment for space robot dynamics and control:
Theories on laboratory test beds ten years ago, now in orbit,” The Int. Journal of Robotics Research,
Vol. 22, No. 5, 2003, pp. 321–325.
[10] Choset, H. and Kortenkamp, D., “Path planning and control for free-flying inspection robot in space,”
Journal of Aerospace Engineering , Vol. 12, No. 2, 1999, pp. 74–81.
[11] Matsunaga, S., Yoshihara, K., Takahashi, T., Tsurumi, S., and Ui, K., “Ground experiment systems
for dual-manipulator-based capture of damaged satellites,” Proc. IEEE Int. Conference on Intelligent
Robots and Systems, Piscataway, 2000, pp. 1847–1852.
[12] Hall, J. S. and Romano, M., “Novel robotic spacecraft simulator with mini-control moment gyroscopes
and rotating thrusters,” Proc. IEEE/ASME Int. Coference on Advanced Intelligent Mechatronics, San
18
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26

Antonio, TX, Sept. 2007, pp. 1–6.
[13] Sanyal, A., Shen, J., and McClamroch, N., “Dynamics and Control of an Elastic dumbell Spacecraft in
a Central Gravitational Field,” Proceeding of 42nd IEEE conference on Decision and Control, Maui,
Hawaii , 2003, pp. 2798–2803.
[14] Sanyal, A., Shen, J., and McClamroch, N., “Control of a dumbbell Spacecraft using Attitude and Shape
Control Inputs Only,” Proceeding of American Control Conference, Boston, 2004, pp. 1014–1018.
[15] Sanyal, A. K., Shen, J., Bloch, A. M., and McClamroch, N. H., “Stability and Stabilization of Relative
Equilibria of Dumbbell Bodies in Central Gravity,” AIAA Journal of Guidance, Control and Dynamics,
Vol. 28, No. 5, 2005, pp. 833–842.
[16] Shen, J., McClamroch, N. H., and Bloch, A. M., “Local Equilibrium Controllability of the Triaxial
Attitude Control Testbed,” Proc. 41st IEEE Conference on Decision and Control , 2002, pp. 528–533.
[17] Shen, J., Sanyal, A. K., and McClamroch, N. H., “Asymptotic Stability of Multibody Attitude Systems,”
Stability and Control of Dynamical Systems with Applications, Boston, 2003.
[18] Aghili, F., “A Robotic Testbed for Zero-G Emulation of Spacecraft,” Proc. 2005 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems, 2005, pp. 1033–1040.
[19] Gallardo, D., Bevilacqua, R., and Rasmussen, R., “Advances on a 6 Degrees of Freedom Testbed for Au-
tonomous Satellites Operations,” Proceeding of AIAA Guidance, Navigation, and Control Conference,
Portland, Oregon, 2011.
[20] Sanyal, A., Holguin, L., and Viswanathan, S. P., “Guidance and control for spacecraft autonomous
chasing and close proximity maneuvers,” 7th IFAC Symposium on Robust Control Design, Denmark,
2012, submitted.
[21] Craig, J., Introduction to Robotics Mechanics and Control , 2005.
[22] Sanyal, A. K. and Baghaei, R., “Realistic Ground Simulation of Spacecraft Motion using Spacecraft
Simulators,” Proceedings of IEEE Conference on Control Applications, Sept. 2008.
[23] Kim, J. J. and Agarwal, B., “Automatic mass balancing of air-bearing-based three-axis rotational
spacecraft simulator,” Journal of Guidance, Control, And Dynamics, Vol. 32, No. 3, 2009.
[24] Schwartz, J. L., Peck, M. A., and Hall, C. D., “Historical Review of Air-Bearing Spacecraft Simulators,”
AIAA Journal of Guidance, Control and Dynamics, Vol. 26, No. 4, 2003, pp. 833–842.
19
Dow
nloa
ded
by S
asi P
rabh
akar
an V
isw
anat
han
on M
arch
9, 2
013
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/6
.201
2-49
26