Embed Size (px)
Citation preview

Dynamical Systems Analysis III:Phase Portraits
By Peter Woolf ([email protected])University of Michigan
Michigan Chemical Process Dynamics and Controls Open Textbook
version 1.0
Creative commons

Questions answered & questions remaining..
1) Create model of physical process and controllers2) Find fixed points3) Linearize your model around these fixed points4) Evaluate the stability around these fixed points
Questions:
• What about all of the other points? What happens when we are not at a fixed point?
• If there are multiple stable fixed points, how large are their ‘basins of attraction’?
• Is there a way to visualize this?• Is there a way to automatically do all of this?

€
dA
dt= 3A − A2 − AB
dB
dt= 2B − AB − 2B2
Nonlinear model
From last class…Linear approximation at A=0, B=0
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
3 0
0 2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
0
0
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=0, B=1
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
2 0
−1 −2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
0
2
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=3, B=0
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
−3 −3
0 −1
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
9
0
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=4, B=-1
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
−4 −4
1 2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
12
−2
⎡
⎣ ⎢
⎤
⎦ ⎥
unstable
unstablesaddle
stable
unstablesaddle

Linear approximation at A=0, B=0
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
3 0
0 2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
0
0
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=0, B=1
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
2 0
−1 −2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
0
2
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=3, B=0
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
−3 −3
0 −1
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
9
0
⎡
⎣ ⎢
⎤
⎦ ⎥
Linear approximation at A=4, B=-1
€
′ A
′ B
⎡
⎣ ⎢
⎤
⎦ ⎥=
−4 −4
1 2
⎡
⎣ ⎢
⎤
⎦ ⎥A
B
⎡
⎣ ⎢
⎤
⎦ ⎥+
12
−2
⎡
⎣ ⎢
⎤
⎦ ⎥
unstable
unstablesaddle
stable
unstablesaddle
A
B ?

What happens at A=3, B=1
A
B ?
(Not steady state)Check derivatives of nonlinear model
€
dA
dt= 3A − A2 − AB
dB
dt= 2B − AB − 2B2
€
dA
dt= 3(3) − (3)2 − (3)(1) = −3
dB
dt= 2(1) − (3)(1) − 2(1)2 = −3

A
B
Trajectories
A
time
B
time
3
2
1
0
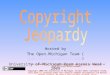
Phase Portrait

Fixed points
Vector field
Trajectory
Stable and unstable orbits
I: converge to fixed point
II: diverge
III: diverge
IV: diverge

Other possibilities
€
dx
dt= 2x − y + 3(x 2 − y 2) + 2xy
dx
dt= x − 3y − 3(x 2 − y 2) + 2xy
Another nonlinear system(Default example in PPLANE)
stable
unstable
Basin of attraction I
Basin of attraction II.1 Basin of
attraction II.2

Other possibilities
€
du
dt= u −
1
3u3 − w − 2
dw
dt= 0.1 1.5 + 2u − w( )
Another nonlinear system(FitzHugh-Nagumo model)
Limit cycle
unstable
Region I
Region II
Note: Locally unstable systems can be globally stable!

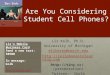
Other possibilities
€
dx
dt=10 x − y( )
dy
dt= 28x − y − xz
dz
dt= xy − 2.6667z
Another nonlinear system(Lorenz equations)
Chaotic system:3+ dimensionsNever converges to a point or cycle
Image from java app at http://www.geom.uiuc.edu/java/Lorenz/
Unstable fixed point

Other possibilities
€
dx
dt=10 x − y( )
dy
dt= 28x − y − xz
dz
dt= xy − 2.6667z
Image from java app at http://www.falstad.com/vector3d/
Unstable fixed point
(Same system shown in 3D with white balls following the trajectories)

Concepts from phase portraits extend to higher dimensions
• Fixed points, trajectories, limit cycles, chaos, basins of attraction
• Many real chemical engineering systems are high dimensional and very nonlinear.
€
dCA
dt=
F
VCAf − CA( ) − k1Exp
−ΔE1
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CA
2
dCB
dt=
F
V0 − CB( ) + k1Exp
−ΔE1
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CA
2 − k2Exp−ΔE2
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CBCA
dCC
dt=
F
V0 − CB( ) + k2Exp
−ΔE2
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CBCA
dT
dt=
F
VTf − T( ) +
−ΔH1
ρc p
⎡
⎣ ⎢
⎤
⎦ ⎥k1Exp
−ΔE1
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CA
2 +−ΔH2
ρc p
⎡
⎣ ⎢
⎤
⎦ ⎥k2Exp
−ΔE2
RT
⎡ ⎣ ⎢
⎤ ⎦ ⎥CBCA −
UA
Vρc p
T − Tj( )
dTj
dt=
F j
V j
Tjin − Tj( ) +UA
V jρc p
T − Tj( )
Example: CSTR with cooling jacket, multiple reactions, and one PID controller
€
dF j
dt= F jss + Kc T − Tset( ) +
1
τ I
xI + τ D
d(T − Tset )
dt
dxI
dt= T − Tset

What does this have to do with controls?
• Control systems modify the dynamics of your process to:– Move fixed points to desirable places– Make unstable points stable– Modify boundaries between basins– Enlarge basins of attraction

–Move fixed points to desirable places–Make unstable points stable–Modify boundaries between basins–Enlarge basins of attraction

How can a control system change the dynamics?
• Adding new relationships between variables
• Adding new variables (I in PID control)
• Adding or countering nonlinearity
• Providing external information

Take Home Messages
• Phase portraits allow you to visualize the behavior of a dynamic system
• Control actions can be interpreted in the context of a phase portrait
• Local stability analysis works locally but can’t always be extrapolated for a nonlinear system.