Embed Size (px)
Citation preview

1
DYNAMIC TRANSMISSION TUNING TESTBED FOR BAJA SAE CAR
MEIE 4701/4702
Technical Design Report
December 4, 2018
Department of Mechanical and Industrial Engineering
College of Engineering, Northeastern University
Boston, MA 02115
DYNAMIC TRANSMISSION TUNING TESTBED FOR
BAJA SAE CAR
Dynamic Transmission Tuning Testbed for Baja SAE Car
Final Report
Design Advisor: Prof. Andrew Gouldstone
Prof. Abhishek Kumar
Design Team Max Gieraltowski, Benjamin Lerman,
Kienan Mooney, Savannah Page Dylan Rogers

2
Design Team
Max Gieraltowski, Benjamin Lerman, Kienan Mooney, Savannah Page
Dylan Rogers
Design Advisor Design Advisor Prof. Andrew Gouldstone Prof. Abhishek Kumar
Abstract
A dynamometer is a device used for measuring the power output of a system. The project is primarily motivated by the need to address what the NU Baja SAE team has determined to be the limiting factor in the performance of its latest competition vehicle – transmission performance. To assist in the tuning and development of the continuous variable transmission (CVT), the capstone group designed and built a robust, instrumented dynamometer. A custom solution was needed since off the shelf systems are cost prohibitive. The dynamometer meets or exceeds several key needs identified by the team. Some of these criteria are a high level of repeatability, reduced cost compared to off the shelf systems, and the ability to simulate several dynamic events with more instrumentation and automation. At this time, all designs are final, and one unit has been fully fabricated, assembled, and tested including both mechanical and electrical systems. Software development is complete for the control system as well as the data processing. The system is ready for the arrival of the hysteresis brake; once it has arrived it can be installed, and regular use of the dynamometer can begin. The project has been completed successfully, providing the team with a tool which allows them to better understand operation of the CVT such that its performance can be optimized for years to come. Additional testing, such as custom brake thermal testing and CVT thermal testing can be performed, as well as engine performance analysis.

3
Table of Contents 1 Introduction 6 1.1 Problem Statement 6 1.2 Concept Development 6 1.3 Design Constraints 6 1.3.1 Integration with Current Drivetrain 6 1.3.2 Cost 6 1.3.3 Size and Ease of Use 6 1.4 Goals 7 2 Background 7 2.1 Baja SAE 6 2.2 Continuously Variable Transmissions 9 2.3 Dynamometers 10 2.4 Current Dynamometers 11 2.5 Other Baja SAE Teams 12 3 Design Considerations 13 3.1 Dynamometer Concepts 13 3.2 Power Absorber 13 3.2.1 Hysteresis 13 3.2.2 Water 14 3.2.3 Friction 15 3.2.4 Eddy Current 16 3.2.5 Inertia 16 3.2.6 AC/DC Generators 17 3.2.7 Powder 17 3.3 Decision Matrix 18 3.4 Chassis 18 3.4.1 Belt Tension 18 3.4.2 Chassis Construction 19 3.4.3 Rigid Anchoring 20 3.4.4 Heat Management 20 3.5 Controls and Electrical Systems 20 3.5.1 User Experience 20 3.5.2 Sensors 21 3.5.3 Control Outputs 22 3.5.4 Control Considerations 23 3.5.5 Microcontroller (MCU) Selection 24 4 Initial Designs 25 4.1 Power Absorber 25 4.1.1 Hysteresis Brake 25 4.1.2 Friction Brake 26 4.1.3 Torque Arm 26 4.2 Chassis 27 4.2.1 Belt Tension 27 4.2.2 Frame 28 4.2.3 Automatic Throttle 30 4.3 Modeling 31 4.4 Controls and Electrical Systems 31 4.4.1 Brake Drive Circuit 31 5 Final Designs 32 5.1 Power Absorber 32 5.1.1 Hysteresis Brake & Torque Arm 32 5.1.2 Friction Brake 32 5.2 Chassis 34 5.2.1 Belt Tension 34 5.2.2 Frame 35 5.2.3 Automatic Throttle 35

4
5.3 Modeling 36 5.4 Controls and Electrical Systems 37 5.4.1 Brake Drive Circuit 37 6 Testing and Analysis 38 6.1 Chassis 38 6.2 Controls and Electrical Systems 39 7 Future Work 42 8 Conclusion 43 9 Intellectual Property 43 9.1 Description of Problem 43 9.2 Proof of Concept 43 9.3 Progress to Date 43 9.4 Individual Contributions 44 9.5 Future Work 44 10 References 44
List of Figures
Figure 1: Northeastern University’s 2017 Baja vehicle during acceleration event 7 Figure 2: (Left) CVTech CVT, (Right) Gaged GX9 CVT 8 Figure 3: Engine speed vs vehicle speed for a CVT and a discrete gear transmission [1] 8 Figure 4: CVT operation [2] 9 Figure 5: (Left) chassis dynamometer, (Right) engine dynamometer [3, 4] 10 Figure 6: NU Baja dynamometer results 10 Figure 7: Current NU Baja dynamometer 11 Figure 8: Cornell’s custom engine dyno [7] (left) and Iowa’s custom chassis dyno[8] (right). 12 Figure 9: Sectioned view of a hysteresis power absorber [10]. 13 Figure 10: (Left) Diagram of water brake. (Right) Image of Dynomite Water Brake. [12] 14 Figure 11: An example of a caliper and disk brake system. [13] 14 Figure 12: An eddy current brake. The coils are seen in yellow. [14] 15 Figure 13: An inertia dynamometer with a large steel flywheel [16]. 16 Figure 14: AC generator dynamometer coupled to a small engine [18]. 16 Figure 15: Weldment dynamometer frame (left) and 80/20 dynamometer frame (right). 18 Figure 16: Flow chart describing standard operating procedure. 20 Figure 17: PID control scheme. 22 Figure 18: On-vehicle torque data measured on vehicle axle’s. 23 Figure 19: ESP32 SoC block diagram [20]. 24 Figure 20: Magtrol BHB-24 with blower. 25 Figure 21: Load cell and torque arm. 26 Figure 22: The engine mount subassembly with transparent components. Engine not shown. 27 Figure 23: The subassembly with the engine mounted. 27 Figure 24: First revision frame assembly with mounted casters. 28 Figure 25: First revision component layout. 28 Figure 26: Servo actuated pulley-based throttle. 29 Figure 27: SimuLink software model and torque output plot. 30 Figure 28: Brake drive circuit simulation schematic. 31 Figure 29: Hysteresis brake mounted in bearing carriers. 32 Figure 30: Friction brake assembly. 33 Figure 31: Caliper and rotor. 34 Figure 32: CAD image of engine mounting for belt tension adjustment. 35 Figure 33: Final frame design. 35 Figure 34: Throttle return assembly. 36 Figure 35: Simulink vehicle velocity output plots. 37 Figure 36: Required hysteresis brake torque during acceleration test. 37 Figure 37: Updated NL5 simulation results with desired brake current (blue) and actual current (orange). 38 Figure 38: Structural deformation. 38 Figure 39: Vibrational deformation. 39 Figure 40: Brake drive PWM waveform. 40

5
Figure 41: Servo PWM waveform. 41 Figure 42: Brake drive DC drive signal. 41 Figure 43: Load cell data. 41 Figure 44: RPM data. 42 Figure 45: Hysteresis brake current data. 42
List of Tables Table 1: Baja competition scoring breakdown 7 Table 2: Brake Selection Decision Matrix 17 Table 3: Control system measurements and sensor choices. 21 Table 4: Control system outputs. 21 Table 5: DC voltage measurements. 39

6
1. Introduction 1.1 Problem Statement The Northeastern University Baja SAE team implemented a custom continuously variable transmission (CVT) for the first time in the 2018 competition season. The transmission performed adequately; however, previous testing provided no conclusive insight into the operation of the clutches in various dynamic events. To assist in the tuning and development of the CVT, the capstone group will design and build a robust, instrumented dynamometer.
1.2 Concept Development The idea for this project stemmed from the performance of the Baja team in the 2018 competitions. The team experienced transmission problems in the endurance race of the Maryland competition, as well as having poor outcomes in the drivetrain events of hill climb, acceleration, and sled pull. The performance was determined to be due to a lack of knowledge in transmission tuning, as this was the first year running the custom system. The team currently uses an inertial dynamometer to simulate acceleration runs. This system does not appropriately simulate other dynamic events. The need to better understand the transmission in each loading scenario and to be able to tune for peak performance in such scenarios was the major motivation for this project. Secondary reasons for this project include improving safety, mobility and usability of the CVT testing method when compared to old dynamometers.
1.3 Design Constraints 1.3.1 Integration with Current Drivetrain The major design constraint of this project is the current CVT and engine. The sensors and brake must be able to operate within the same RPM range as the engine and transmission. The packaging must allow for CVT guarding matching that of the Baja vehicle. Additionally, the chassis must be able to withstand the vibrations produced by the engine and transmission.
1.3.2 Cost Dynamometers are often customized for their intended use as size, power requirements, and brake types vary greatly. Commercial retailers would be able to sell a custom dynamometer to meet the needs of the Baja team, but these are often expensive and ultimately out of the budget for the team. A made-to-order off the shelf dynamometer system is typically on the order of $20,000. A custom dynamometer can be built to perform the same as the off the shelf alternative for much cheaper.
1.3.3 Size and Ease of Use The dynamometer must be mobile and small enough to store in the team’s space when not in use. Previous dynamometers were large and cumbersome to move. The sensors and software used with the previous systems are difficult to learn, leaving only a select number of team members able to run the dynamometer. The new dynamometer must be more accessible for team members to use without specialized knowledge.

7
1.4 Goals The dynamometer has a series of specific requirements to meet the needs of the Baja team for current and future testing of their transmission. The system must be able to power itself and record data as a standalone unit, without being attached to the vehicle. When the dynamometer is used, the CVT is removed from the vehicle and placed onto the dynamometer for testing. The key metrics include angular velocities and torques on the engine shaft and CVT secondary shaft. It must also measure and record temperature of the CVT belt during operation. The conditions for operation must be similar to those that the CVT experiences during Baja competitions - focusing on acceleration, hill climb, and sled pull events. The dynamometer must also provide for a method to adjust CVT belt tension. Repeatability and ease of use are also important requirements for this system. The dynamometer must be able to perform tests and record data with high repeatability. This can be achieved through a rigid chassis that is able to anchor to the ground, automatic throttle control, and clear data outputs through a user-friendly interface.
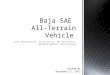
2. Background 2.1 Baja SAE Baja SAE is one of several collegiate design series (CDS) sponsored by the Society of Automotive Engineers (SAE). Baja SAE tasks college students with designing, building, and ultimately racing a four-wheel off-road vehicle. Three North American competitions are held each year, with additional notable events held in India and Brazil. At competitions, teams participate in several static and dynamic events (Table 1), accruing points out of a possible 1000. Static events include a cost report, sales presentation, and design presentation. Dynamic events include an acceleration event shown below in Figure 1, maneuverability course, suspension course, traction event, and a four hour endurance race [21].

8
Figure 1: Northeastern University’s 2017 Baja vehicle during acceleration event
Table 1: Baja competition scoring breakdown
All competitors are required to use the same engine, a Briggs & Stratton Model 19, governed to a maximum of 3850 RPM [21]. A stock engine pushes teams to focus on other areas of vehicle design, such as chassis, suspension, and drivetrain to outperform competitors.

9
2.2 Continuously Variable Transmissions Baja SAE teams almost exclusively use CVTs for a variety of reasons. For less competitive teams, CVTs are relatively easy to set up and use effectively, offering decent out of the box performance and less complexity compared to a sequential manual transmission like the one previously used by the NU Baja team. Two available off-the-shelf CVTs are shown in Figure 2. For competitive teams with greater manpower and budgets, CVTs can offer fantastic performance at the cost of time spent developing them.
Figure 2: (Left) CVTech CVT, (Right) Gaged GX9 CVT
CVTs offer a key advantage over discrete gear transmissions in that they keep engine RPM stable at peak power. From a stop, a CVT-equipped vehicle accelerates its engine to peak performance while the transmission shifts higher to keep increasing vehicle speed [1]. Figure 3 below shows a comparison of a discrete gear transmission and a CVT. While the discrete gear transmission is constantly in and out of peak power, the CVT allows the engine to remain at peak power.
Figure 3: Engine speed vs vehicle speed for a CVT and a discrete gear transmission [1]
A CVT comprises two clutches, primary and secondary, with a belt connecting them [1]. The belt rides between angled pulley faces on each clutch known as sheaves. Figure 4 below shows a diagram of a CVT shifting. At low engine speeds or with a stopped vehicle, the clutches are in the position on the left. As engine speed increases, the primary sheaves move towards one another, forcing the belt to slide up the angled faces to a higher radius. This effectively produces a taller ratio and forces the secondary sheaves to move apart, with the belt sliding down the sheaves to a smaller radius.

10
Figure 4: CVT operation [2]
While CVTs can be excellent choices, they do have some downsides. They are overall less efficient than discrete gear transmissions, with power losses occurring due to friction between the belt and sheaves as well as belt slip. It is important to note that this power loss manifests itself as heat, further reducing performance if it is not managed appropriately. Additionally, CVTs generally require more maintenance than a manual transmission as their components are more susceptible to wear and fatigue during operation. While off the shelf CVTs work well for many teams, those at the forefront of competition and innovation design and use custom CVTs. There are obvious advantages to a custom CVT. It can be designed to maximize performance for a single car while being as light and tunable as a team desires. Additionally, the ability to control the design of every component is crucial to making incremental improvements to overall performance. The 2018 season marks the NU Baja team’s first year with a custom CVT. 2.3 Dynamometers A dynamometer (dyno) is a device used for measuring the power output of a motor. Within the scope of vehicle testing, there are several types of dynamometers, mainly chassis dynos (Figure 5a) and engine dynos (Figure 5b). Chassis dynos, sometimes referred to as rolling roads, are made of rollers connected to an absorption unit. A vehicle is typically driven onto the rollers and secured in place, where it can then accelerate the rollers against the resistance provided by the absorber. During testing, engine power and torque can be measured and recorded as the vehicle operates. Engine dynos work in a similar fashion, except that they measure power and torque directly from the engine while it is not installed in the vehicle.
Figure 5: (Left) chassis dynamometer, (Right) engine dynamometer [3, 4]

11
For Baja SAE teams, a dynamometer is an invaluable tool for any team wishing to collect transmission data and improve their performance and design. Using the results of a dynamometer test, teams can make educated decisions on how to best tune their vehicle for competition. The results of one of the NU Baja team’s dyno tests in shown below in Figure 6. In this plot, the blue line represents engine speed while the red line represents secondary clutch speed. Using this data, the team can make changes to CVT setup and compare results until an optimal tune is found.
Figure 6: NU Baja dynamometer results
2.4 Current Dynamometer The team currently has a dynamometer that was built as a SIRF (Scholars Independent Research Fellowships) project several years ago (Figure 7) [23]. It is an inertia dynamometer, using a flywheel as resistance to load the transmission. In this figure, the Gaged GX9 CVT is installed and can be seen on the left. Underneath the engine on the right resides the flywheel. This flywheel was dimensioned specifically to replicate the energy needed to accelerate the vehicle. While significantly better than only on-car tuning, the current dynamometer has several drawbacks serving as the impetus for this project. It is difficult and awkward to move and anchor, features instrumentation that fails regularly, is less repeatable than desired, and only simulates acceleration.

12
Figure 7: Current NU Baja dynamometer
2.5 Other Baja SAE teams As continuous variable transmissions are the most used transmission across Baja SAE vehicles, dynamometers are common tools to improve performance. Many of the top performing teams utilize engine dynamometers to tune their CVTs for each dynamic event. Several other student-built dynos are shown in Figure 8. Due to budget constraints Cornell University designed and built their own custom dynamometer in 2013. This dynamometer implemented a large flywheel and some hall effect sensors and microcontrollers to measure transmission efficiency [7]. University of Iowa also tested their transmission with custom dynamometers. Initially a large flywheel was used as the power absorber in an engine dynamometer [8]. A later iteration used a large flywheel once again on a chassis dynamometer to measure the full drivetrain efficiency. Finally, University of Akron, Zips, used a water brake-based dynamometer to determine which transmission would best suit their vehicle needs [9].
Operator
Engine
CVT
Flywheel

13
Figure 8: Cornell’s custom engine dyno [7] (left) and Iowa’s custom chassis dyno[8] (right).
3. Design Considerations 3.1 Dynamometer Concepts
A dynamometer that is designed to be driven by a power source is called an absorption dynamometer. Most commonly seen dynamometers are used to quantify the engine performance of consumer or race vehicles. These types of dynamometers are driven by the vehicle’s wheels, transmission, or engine.
Dynamometers must provide a resistive force for the motor during operation. This resistive force can come from a variety of brakes: water brakes, eddy current brakes, electromagnetic brakes, inertial flywheels, or friction brakes. These brakes absorb power from the engine and provide a resistive torque during operation of the dynamometer.
To measure power the dynamometer includes sensors at the brake. These sensors record both angular velocity and torque transmitted by the shaft. The product of these two values gives real time power values throughout a dynamometer test. An integral part of the dynamometer is the data acquisition system which collects and displays information from sensors.
3.2 Power Absorber 3.2.1 Hysteresis Hysteresis brakes require a DC voltage and current to provide braking torque. The torque varies with the current and can be calibrated for control. Hysteresis brakes function by creating a magnetic field around a rotor, usually made of steel, to create a braking torque on the rotor that the input shaft is it coupled to. The rotor and shaft are surrounded by a pole structure. When the field coil is energized, it creates a magnetic field that opposes the rotor’s rotation [10]. The sectioned view is provided in Figure 9.

14
Figure 9: Sectioned view of a hysteresis power absorber [10].
These types of power absorbers can provide full torque at zero angular velocity, which allows for stalling of the transmission; this is important because this emulates how the vehicle is driven in dynamic events. The driver applies the brakes, while simultaneously opening the throttle slightly. Once the engine RPM reaches a desired level, they open the throttle fully while releasing the brakes. Hysteresis brakes do not have components that contact while spinning, so only bearing drag occurs which allows for the system to be low maintenance. Additionally, it is highly repeatable to produce braking torque of various magnitudes since the system can be calibrated to show what current produces what torque, independent of speed. The system is packaged in its own housing and must be attached to a flange on the dynamometer. Control systems are not contained inside the hysteresis brake. These brakes are readily available from vendors. 3.2.2 Water A water power absorber, seen below in Figure 10, uses water to provide a resistive torque on a shaft. The input shaft that is coupled to the transmission is also coupled to a rotor. The rotor is encased by a sealed housing which can be filled with varying volumes of water. As the rotor spins, it contacts water inside the housing. The larger the water volume, the larger the resistive torque. This viscous coupling exerts a force onto the rotor and the housing. The housing is mounted to a torque arm that allows for measurement of torque from the forces acting on the housing [11].
Figure 10: (Left) Diagram of water brake. (Right) Image of Dynomite Water Brake. [12]

15
As the rotor spins and contacts water, it produces heat. As a result, water must be consistently flowed through the housing to keep temperatures within an acceptable range. Fresh water is introduced by a manual or electronically controlled valve and hot water is exits through an outlet. The water in must be pressurized and maintain a minimum flow rate for successful operation. This type of power absorber produces no resisting torque at zero velocity and therefore cannot stall the transmission. An advantage of this absorber is that its size can be relatively small compared to its horsepower rating. The reaction time for water absorbers is slightly slower than for electrically controlled ones, such as the hysteresis brake. 3.2.3 Friction Friction brakes like the one in Figure 11 rely on mechanical friction between two surfaces to produce a resisting torque and heat. These brakes can function using a hydraulic brake caliper and disk or drum brake. To provide repeatable results, the braking system would have to be computer controlled. In the case of a hydraulic system, this would require electrical valving and pressure regulators, as well as a pressure source. A drum brake would require a linkage to produce an exact braking force with a strain gauge for a feedback loop. The system would have to self-adjust based on brake wear and manage heat through a cooling system.
Figure 11: An example of a caliper and disk brake system. [13]
3.2.4 Eddy Current Eddy current power absorbers like that of Figure 12 function by providing a resistive torque using induced eddy currents. An eddy current creates a magnetic field that opposes change in magnetic field thus reacting back to create a resisting torque and heat. The torque is dependent on current flow through the brake and speed of the rotor [15]. The power absorber can be mounted to a torque arm to measure resistive torque.

16
Figure 12: An eddy current brake. The coils are seen in yellow. [14]
These brakes produce zero torque at zero speed, so they are not capable of stalling the transmission. Additionally, they require air or water cooling to maintain nominal operating temperatures. These brakes are relatively maintenance free as there are no contacting spinning parts. Reaction time is very good when compared to water brakes. These brakes are readily available from vendors and are most commonly used on chassis dynamometers. 3.2.5 Inertia Inertia power absorbers as shown in Figure 13 use flywheels of known size and mass to provide a resistive load. This load cannot be changed during testing. Power is calculated by determining how quickly a known inertial mass can be accelerated. This type of absorber does not provide a variable resistive torque [17]. There is also an added danger with this system because of the amount of energy stored in a rotating flywheel which may violently fail if not designed or manufactured properly. This form of power absorber is the cheapest and simplest, and it cannot stall the transmission.
Figure 13: An inertia dynamometer with a large steel flywheel [16].
3.2.6 AC/DC Generator AC/DC generators like the one shown in Figure 14 can apply power to as well as absorb power from the transmission using alternating or direct current motors. Power absorbed by the brake is

17
converted into electricity and supplied back to the grid or dissipated into a load. The generator functions by using a rotor to induce an electrical current in a stator, which converts mechanical energy into electricity. By applying a current to the generator it acts as a motor and provides a resistive torque. This system can apply full torque at zero speed which allows for stalling of the transmission [19]. These generators are typically very expensive and require little to no maintenance. They can be controlled well with a fast response time.
Figure 14: AC generator dynamometer coupled to a small engine [18].
3.2.7 Powder Powder brakes function similarly to eddy current brakes. Powder brakes use a fine metallic powder placed between the rotor and stator of an eddy current brake. The rest of the brake functions as an eddy current brake described in section 3.2.4. The main difference between the two brake types is that powder brakes can produce maximum resistive torque at zero speed. Additionally, powder brakes cannot operate at high speeds due to frictional contact between the powder and stator, causing wear. These types of brakes have a low speed and power range and require maintenance as well as cooling.
3.3 Decision Matrix Following research on each type of power absorber, a decision matrix, provided below in table 2, was created to facilitate the selection of a power absorber. Criteria were weighted from 1 to 5 on a scale of importance, where 5 is most important. Cost was selected as the most important criteria due to the small budget allowed for capstone. Other important criteria include control and power absorbed to ensure that the absorber we purchase can be incorporated into the dynamometer and absorb the correct amount of power from the transmission. Water and hysteresis brakes are the top two scorers. The team will source quotes and lead times for both absorber types and make a final decision.
Table 2: Brake Selection Decision Matrix Criteria Weight 5 2 2 4 3 4 3
Brake Type Cost Power Req. Other Req. (air, water) Control Mass Power Absorbed Capable of Stalling
Hysteresis 3 3 3 4 3 4 5 Water 4 5 2 4 5 5 1
Eddy Current 3 3 2 3 3 3 1

18
Friction 5 5 2 1 5 2 5 Powder 1 4 3 3 1 3 1 Inertia 4 5 5 1 1 5 1
AC/DC Generator 1 1 1 2 3 5 5
Weighted Total
Hysteresis 83 Water 88
Eddy Current 61 Friction 81 Powder 49 Inertia 70
AC/DC Generator 61
3.4 Chassis 3.4.1 Belt Tension Belt tension is an important consideration for CVT tuning, as belts can be a significant source of power loss in the transmission. There are two types of losses that occur in the belt. Torque losses occur as a function of compression, tension, and deformation of the belt and speed losses occur as a function of speed loss from primary clutch to secondary clutch. The first is associated with the unintentional transformation of energy from the engine into heat via friction, while the second is associated with belt slip. Belt slip is a phenomenon that occurs when the belt speed does not match the speed of the primary clutch, resulting in an unintended drop in speed in the secondary. For this reason, it is vital to test a range of CVT belts at various tensions. The dynamometer must allow for the adjustment of belt tension between tests. This also provides the ability to test belts of various lengths if the adjustment range is sufficiently large. These two requirements indicate that the center to center distance between the two clutches must be able to be varied. The simplest design method that would allow for this adjustment is to mount the shafts on slots. In combination with a center to center jig, the shafts can be spaced to precise dimensions. An alternative to this design is to use a lead screw and linear slides to move the engine and set a center to center distance. This design would enhance usability and repeatability, due to the elimination of a center to center jig that must be applied and removed from the two shafts. The lead screw design would allow for “on the fly” center to center adjustments in much less time than if slots were used. 3.4.2 Chassis Construction The chassis must be rigid and portable in order to allow for safe, repeatable test results, while also allowing for transportation and storage. The chassis must be manufacturable in the capstone shop. It must also be able to protect the user from moving components, while allowing for proper thermal management.

19
There are a variety of materials and designs available for the chassis construction such as steel or aluminum weldments or 80/20 aluminum extrusions. Examples from previous NU Baja projects are provided in Figure 15. A weldment chassis is the most rigid, but is more difficult to manufacture because of the need for welding. An 80/20 chassis is more expensive and less rigid due to bolted joints; it is also easier to assemble. The chassis may also utilize caster wheels to make it portable for outdoor testing and indoor storage.
Figure 15: Weldment dynamometer frame (left) and 80/20 dynamometer frame (right).
3.4.3 Rigid Anchoring As mentioned in section 3.3.2, rigidity is important for the dynamometer to produce consistent and accurate data. Vibrations in the chassis can create noise in data recordings that may interfere with test results. Further, a non-rigid chassis may have a reduced lifespan. A design consideration for making the chassis rigid is to anchor it to the ground through a static anchor. If the test is to be performed on a concrete surface then a concrete anchor may be installed into the ground. The dynamometer can then be bolted directly into this anchor and fixed in place. 3.4.4 Heat Management Several components on the dynamometer generate heat during operation. The power absorber produces a large amount of heat that varies with the amount of energy dissipated. In the case of the water absorber, heat is managed via the water flow through the absorber. With a hysteresis brake, cooling water or compressed air must be supplied in order to maintain a sufficiently low operating temperature. If not, absorber life and the braking torque that it can apply both suffer. Additionally, the transmission produces significant heat during operation. This heat is measured and controlled throughout testing. The CVT is enclosed in a fashion similar to that seen in a Baja vehicle to provide realistic thermal conditions during testing. The dynamometer allows for the addition of venting in the CVT enclosure to validate heat management techniques and establish a steady state operating temperature.
3.5 Controls and Electrical Systems

20
3.5.1 User experience To ensure a sufficient level of repeatability, manipulation of the throttle and control of the applied load to the transmission must be computer controlled. The following procedure in Figure 16 was drafted to drive design decisions related to the instrumentation and controls.
Figure 16: Flow chart describing standard operating procedure.
Here, the self-test serves to enforce safe use of the system, preventing test executions until several conditions are met, including appropriate throttle position (off), engine status (off), and brake status (off). A similar procedure safely shuts down the system. Circuits are designed such that in the case of abrupt power loss, no unsafe conditions are introduced. 3.5.2 Sensors The system is responsible for recording key performance metrics while executing tests. Some of these metrics, such as power transmission efficiency, and dynamic event performance (speed), are calculated after the conclusion of the test, based on a combination of data recorded. Table 3 contains all the measurements the system is responsible for taking, as well as their signal type and the sensor used to record them.
Table 3: Control system measurements and sensor choices.

21
Measurement Sensor Signal Type
Engine RPM Hall Effect GPIO*
Secondary RPM Hall Effect GPIO*
CVT Ambient Temperature Thermistor Analog, single-ended
CVT Belt Temperature IR Serial communication
Throttle Position Potentiometer Analog, single-ended
Engine Torque Dynamic Torque transducer Analog, differential
Braking torque Load cell Analog, differential
*GPIO: general purpose input/output The load cell and dynamic torque transducer require precise differential measurements which need to be taken by an analog to digital converter (ADC) for sufficient resolution and accuracy. This provides significantly improved measurement quality. GPIO signals as well as serial communication for the IR sensor (I2C, SPI, etc.) can be connected directly to the microcontroller (MCU). 3.5.3 Control Outputs There are several outputs from the MCU that control system operation. They are listed in Table 4 with the actuator or component controlled, as well as the signal type used for control as generated by the MCU.
Table 4: Control system outputs. Output Actuator Signal Type
Brake Torque Brake (water or hysteresis) PWM*
Throttle Position Servo PWM*
*PWM: Pulse-width modulation To vary braking torque, different circuitry is required for the water brake and the hysteresis brake. A water brake’s output torque is controlled via flow rate, which is in turn controlled by a valve. In this case, it is likely that the PWM signal directly controls valve position via an integrated servo. Specific details of this implementation depend on the exact valve chosen if a water brake is used in the final design. A hysteresis brake requires a specific DC input voltage, and therefore cannot be controlled directly via a PWM signal. Instead, the PWM signal would be used for the control of a step-down voltage converter such as a buck converter to vary the voltage applied to the brake. 3.5.4 Control Considerations

22
There are at least two instances of closed loop control in the system. Both use the same PID controller as shown in Figure 17.
Figure 17: PID control scheme.
The first instance of this control is the control of the throttle actuator. In this case, the desired engine speed is the setpoint, with the data from the actual engine speed taking the place of the measured variable. The controller output dictates the throttle position. While the desired engine speed varies with time, it is a slow change in large discrete levels and can be accurately described by the following piecewise-linear function in the case of the acceleration event, for example.
The second instance controls the braking torque. Each dynamic event simulation has a different braking torque profile, where braking torque varies significantly with time. The exact form these profiles will take is not yet derived but is certainly complex. One example is the data in Figure 18, obtained from on-vehicle measurement of the torque applied to the vehicle’s axles during driving.

23
Figure 18: On-vehicle torque data measured on vehicle axles.
There are also some key mechanical and or electrical time constants within the system to consider. In the case of a hysteresis brake, the brake itself has a large inductance and is therefore slow to respond to changes in the input voltage, with a response time on the order of 400ms. The controller must not over compensate for this behavior, as it would cause instability and poor performance by constantly over-shooting the setpoint.
3.5.5 Microcontroller (MCU) Selection The Baja SAE team has experience with MCU-based on-vehicle data acquisition systems. To leverage this experience and certain existing hardware and software, the primary choice for the MCU is the ESP32-WROOM-32 from Espressif Systems. The ESP32 is a dual-core microprocessor comprising two Tensilica Xtensa LX6 32-bit cores running at up to 240MHz.

24
Figure 19: ESP32 SoC block diagram [20].
As evident from the Figure 19, there are sufficient serial communication modules (I2C, SPI, UART) as well as PWM modules and GPIO. Currently, the ESP32 being used is part of an off-the-shelf development board which adds additional functionality such as a small voltage regulator, lithium battery charger, and USB-to-Serial converter in a breadboard-compatible package. Beyond the USB-to-Serial converter, these additional features do not add meaningful functionality in this application and therefore the chip itself will be purchased individually and a custom PCB will be designed to more appropriately suit the project.
4. Initial Designs 4.1 Power Absorber 4.1.1 Hysteresis Brake After examining the options listed previously, the team has selected a hysteresis brake as the power absorber for the dynamometer, specifically the BHB-24 from Magtrol (Figure 20).

25
Figure 20: Magtrol BHB-24 with blower.
The BHB-24 can provide a maximum torque load of 75 ft-lb, a maximum RPM of 12,000, and 6,000W of continuous power absorption. In order to absorb this power, the brake must be connected to a blower (seen in Figure 20) that circulates cool air throughout its housing. The brake and blower together weigh approximately 150 lbs, and so special consideration will need to be taken to make moving them safe and easy. 4.1.2 Friction Brake The Briggs & Stratton Model 19 engine used in the Baja SAE competition produces a maximum of 15 ft-lb of torque throughout its operating range. After the reductions of the CVT at its lowest ratio, this value increases to 55 ft-lb. Since this exceeds the maximum torque output of the brake, it will be unable to stall the transmission. Because of this, a friction brake will be implemented to momentarily stall the transmission at the beginning of a test. Once a test has started, there is no need to stall the transmission, and the hysteresis brake will provide the resistive torque. The team is currently evaluating designs for a friction brake. 4.1.3 Torque Arm
To get a torque measurement from the brake, an S-type load cell will be used. This load cell will be securely mounted to the chassis on one end. From the other end a torque arm will extend to the underside of the brake, preventing the main body from rotating. This system can be seen in Figure 21 below with an example load cell colored light grey.

26
Figure 21: Load cell and torque arm.
4.2 Chassis 4.2.1 Belt Tension The dynamometer design will include a simple and easy to use solution for adjusting belt tension between tests. The current design is to place the engine on a moveable platform that can travel in one axis and lock in place. The travel of the engine will be ±3 inches in the direction perpendicular to its shaft. This will allow the primary clutch of the CVT to move towards or away from the secondary clutch, thereby varying the belt tension. The moveable platform is supported by four bronze bearings and travels on two 1inch diameter steel shafts. The platform is propelled by an ACME lead screw which can be powered using a wrench or electric drill. Figures 22 and 23 show all components of the subsystem. This subsystem bolts directly to the chassis. A steel rule can mount directly to the platform to indicate the linear displacement of the engine. A caliper can be used to check displacement as well. A shaft collar locks the lead screw from rotating once the distance is set.

27
Figure 22: The engine mount subassembly with transparent components. Engine not shown.
Figure 23: The subassembly with the engine mounted.
4.2.2 Frame The main structure of the dynamometer will be a truss frame capable of supporting the entire system. The NU Baja team has used both weldment and 80/20 extrusion frames in the past, and both options are being explored for this project. The first iteration is being modeled with 2” x 2” steel tube as a simple starting point for the design. A first revision of the frame can be seen in Figure 24 below.
Engine Plate
Engine Plate
Engine

28
Figure 24: First revision frame assembly with mounted casters.
The largest design consideration addressed in this first revision is the packaging of the main components of the assembly, including the engine, hysteresis brake, and CVT. The relative layout of the assembly was determined, seen in Figure 25, and structural members could be placed where necessary.
Figure 25: First revision component layout.
Hysteresis Brake
Engine
CVT
Frame

29
4.2.3 Automatic Throttle A large downfall of the current dynamometer is the human operated components. The throttle is engaged by pulling a long cable causing repeatability issues as well as putting an operator in the range of the flywheel. An automatic controlled throttle mechanism is key for a repeatable, reliable and safe system. To run this automatic throttle an HSB-9465SH servo motor was selected. This model operates at 6.0 to 7.4 Volts and provides a max torque of 187 oz/in. This model has a maximum angular travel of 120˚, allowing for full throttle engagement. Initial designs included a rigid bracket from the servo to the throttle to directly transfer rotation. However, fearing this would be too heavy for the servo, light weight pulley options were explored. With the servo mounted to the air filter cover, the cable could be redirected to pull the throttle. The assembly can be seen below in Figure 26.
Figure 26: Servo actuated pulley-based throttle.
Throttle Lever Servo
Pulley

30
4.3 Modeling The purpose of the dynamometer is to accurately simulate road conditions on the transmission and engine. To do this, the team must first determine what road conditions will be simulated. The first condition that the team is investigating is the acceleration of the vehicle on flat ground. Modeling of the vehicle traveling on flat ground is required to determine the transmission loading. MATLAB and SimuLink software are used to simulate the vehicle accelerating from a stop. This simulation (Figure 27) has an output of the torque on the secondary of the transmission. This calculated torque can then be used to power controls simulations to determine the correct current profile to be applied to the hysteresis brake.
Figure 27: SimuLink software model and torque output plot.
4.4 Controls and Electrical Systems 4.4.1 Brake Drive Circuit Because the torque the brakes provides is proportional to the DC current through its field coil, a constant current source that can be controlled via the microcontroller is needed. Because the microcontroller itself cannot provide the necessary current and voltage required to produce the maximum braking torque (2.4A, 24VDC), additional circuitry is required. It is straight forward for the microcontroller to produce a pulse-width-modulated (PWM) signal at some frequency with a variable duty cycle. This PWM signal is heavily filtered to produce a smooth DC voltage, which varies in amplitude based on the duty cycle. This DC voltage is used to control the current through the brake via a network of 3 transistors. Two transistors are connected as a Darlington pair, and provide the base current for the larger power transistor, which ultimately determines the brake current.

31
In order to evaluate the performance of the circuit, a simulation was conducted using NL5, a lightweight circuit simulation package which uses ideal components. Evident in Figure 28 below are the functional blocks which make up the brake drive circuit, namely the input signal, filter, Darlington pair, and power transistor.
Figure 28: Brake drive circuit simulation schematic.
V3, Vramp, and O2 make up the variable duty cycle PWM signal, as this cannot be directly produced by a signal generator in the simulation package. This signal drives the gate of transistor T4, which level shifts this PWM signal to a higher DC voltage VBUS. This is necessary because the microcontroller can only produce logic level (3.3V) signals which are not high enough in amplitude to drive the transistor network. R1, C1, and O1 provide the filtering, converting the PWM signal into a DC voltage, which drives the base of the Darlington pair which comprises T1 and T2. The output of this pair of transistors provides the base current for T3, the power transistor, which determines the current through the brake. The brake is modeled by two discrete components, a resistor in series with an inductor, whose values correspond to manufacturer-provided specifications. R_sense is a small value resistor (0.1 Ω) responsible for converting the current through the brake into a voltage such that it can be monitored by the microcontroller via an ADC. D1 prevents any inductive kick from current transients through the brake from damaging other circuit components.
5. Final Designs

32
5.1 Power Absorber 5.1.1 Hysteresis Brake and Torque Arm As previously discussed, the team selected the Magtrol BHB-24 Hysteresis Brake for this dynamometer (Figure 20). The brake is mounted on two custom machined bearing carriers that support it, but do not constrain rotation along its axis seen in Figure XXX. This allows braking torque to be measured using a load cell as a torque arm. The load cell is mounted tangentially to the brake at a known radius. Once braking torque is applied, the load cell experiences this torque as compression, and the braking torque can be monitored.
Figure 29: Hysteresis brake mounted in bearing carriers.
5.1.2 Friction Brake The final friction brake design was chosen due to is similarity to the brakes used on the Baja SAE vehicle for ease of use. Additionally, the design was chosen with adjustability in mind to allow for rotor and caliper testing on the dyno as well. The final design consists of two subassemblies, the caliper and the latching lever as seen below in Figure *.
Hysteresis brake
Bearing carrier
Load cell

33
Figure 30: Friction brake assembly.
The caliper subassembly includes a Wilwood PS-1 brake caliper, the same calipers used on the front on the 2017 and 2018 Baja vehicles. They have been shown to be robust and reliable. Additionally, the team has experience maintaining these calipers reducing the learning curve of the dynamometer. The caliper is mounted on a rigid 0.120” wall thickness 1” tube. This is attached to the frame by a slotted plate to allow for multiple caliper geometries. The rotor used is a stainless steel 400 EX mounted to the shaft using a B-Loc keyless bushing. The assembly can be seen below in Figure *.

34
Figure 31: Caliper and rotor.
The lever mechanism is linked to the caliper with a 12” stainless steel braided cable. The master cylinder is a Wilwood compact remote side mounted master. This master cylinder has a 5/8” bore and a 1.12” stroke. This is the same master cylinder used on the Baja vehicles, again for ease of use. This is mounted to the welded frame tube. With a pivot point on the frame, a lever the master can be compressed by a foot pedal. 5.1.3 Torque Arm
Fill this out. 5.2 Chassis 5.2.1 Belt Tension Belt tension is varied by moving the primary clutch towards or away from the secondary clutch. The engine, torque transducer, primary shaft, and primary clutch are all mounted on an aluminum carriage. This carriage has three transverse through holes for three steel shafts to pass through. These steel shafts support the weight of the carriage and any forces exerted onto it from the CVT. The steel shafts are mounted to the frame. The carriage slides along the shafts +/- 2 inches towards or away from the secondary clutch. Two of the shaft holes on the carriage have slits cut in them and bolts passed through them. These slits allow for the clamping of the carriage onto the shafts when the desired location is reached. This ensures that the carriage will not move during operation of the dynamometer.

35
Figure 32: CAD image of engine mounting for belt tension adjustment.
5.2.2 Frame
Figure 33: Final frame design.
The final frame, seen above in Figure X, was constructed from 2” x 2” 1018 steel box tube with a 0.120” wall thickness. This was chosen over 80/20 for its rigidity and robustness. The frame was MIG welded together and serves as a solid platform for all components to mount to. Handles were included to allow easy lifting of the dynamometer and anchor points allow the frame to be bolted to concrete anchors or staked into softer ground with rebar.
5.2.3 Automatic Throttle The final design for the automated throttle uses a HSB-9465SH servo motor with a maximum torque of 187 oz/in. and maximum angular travel of 120˚. Use a 1.25” diameter pulley directly on
Anchor Point
Handle

36
the servo splines. The servo is mounted to the air filter cover by an aluminum plate. With a spacer linked the governor cover, the pulley cable is redirected tangent to the throttle lever. Given the full travel of the throttle being just under an inch, the servo can fully actuate the lever. A throttle return spring was tested and adjusted to ensure full rebound when the servo was not engaged without putting an increase strain on the motor. The assembly can be seen below in Figure *.
Figure 34: Throttle return assembly.
5.3 Modeling MATLAB Simulink software was used to create accurate physical models of the Baja vehicle and the dynamometer. The models of the Baja vehicle are used to inform the hysteresis brake control during dynamometer operation. The Baja vehicle was modeled performing a flat ground acceleration, a hill climb, and a sudden deceleration. Additionally, real world data was collected on the vehicle as it drove over obstacles using torque transducers attached to axles. This data is also used to inform brake controls of the dynamometer. These models and empirically collected data allow for the dynamometer to test many dynamic events for the transmission. The models can be iterated on and developed to simulate other dynamic events.
Figure 35: Simulink vehicle velocity output plots.

37
5.4 Controls and Electrical Systems 5.4.1 Brake Drive Circuit As the physical model was updated, new torque profile plots such as the one for acceleration seen in Figure X below were produced. This required re-running the electrical simulation to confirm the circuit was able to meet the system needs. The output of the simulation is shown in Figure X, displaying excellent results in that the actual simulated current matches the set point nearly perfectly.
Figure 36: Required hysteresis brake torque during acceleration test.

38
Figure 37: Updated NL5 simulation results with desired brake current (blue) and actual current (orange).
6. Testing and Analysis 6.1 Chassis ANSYS workbench was used to verify the structural integrity of the frame. As the previous dynamometer showed signs of wear and buckling in the aluminum components, a structural analysis was critical to the new design. To combat this the frame was designed with 0.120” wall thickness 2” tube. FEA was performed included the weight of all components as well as the maximum force seen from the combustion stroke of the engine and moments from the CVTs and belts. The total deformation and the frame, in meters, can be seen below in Figure X.
Figure 38: Structural deformation.

39
As vibration was a major detriment of the previous dyno. The 80-20 frame lacked rigidity and fasteners often came loose. The weldment design removed the need for frame fasteners. Given the maximum RPM of 4,000, the largest frequency seen is 135 Hz. Modal analysis was performed using this frequency range. Frame resonance was not reached in this study. To ensure a thorough vibrational analysis, harmonic & transient analysis was also performed using the static engine weight of 55 lbs and dynamic stroke force of up to 22 pounds was used with a maximum frequency of 140 Hz. Under this worse-case scenario loading the maximum stress was only 17% of the yield stress and maximum deformation was 0.3mm.
Figure 39: Vibrational deformation.
6.2 Controls and Electrical System All functionalities of the control system were verified and tested to ensure they met the designed specifications. This included both hardware and software validation. Hardware validation began with measurement of all DC voltages to ensure they were at the correct levels. Table 5 below contains measured and specified values for all critical voltages.
Table 5: DC voltage measurements.
Once the voltage rails were verified, individual circuit performance was verified. This included the brake drive circuit, analog measurement circuit, serial communications, and other peripherals. The brake drive was verified by applying a PWM signal of known duty cycle via a signal generator, and the corresponding output current measured and verified. Analog measurement circuits were verified by applying a known input and measuring the output voltage and comparing the results. It was determined that both the load cell and torque transducer measurements were initially incorrect, as the low input impedance of the measurement circuit was loading down the bridges contained in both sensors leading to incorrect readings. The input impedance was increased from
Specified (V) Measured (V) Error12 12.5 4%7.4 7.35 1%3.3 3.3 0%1.65 1.67 1%

40
1 kΩ to 1 MΩ eliminating this problem. Serial communications were verified by using an oscilloscope to monitor data and clock lines to ensure accurate data transmission. Software validation involved running the system in an open-loop configuration, reducing the speed at which the software ran, and implementing features one by one. First, ADC communications were tested. A known voltage was applied to each channel, and the corresponding output measured to ensure accuracy. Following this, the PWM outputs for the servo and brake drive control were verified. The software commanded a duty cycle which was then measured using an oscilloscope. Figures X and X below show the resulting waveforms. The servo operates at a frequency of 50 Hz, with an on-time of 700-2300 µs. The brake drive operates at a higher frequency of 1 kHz, with a duty cycle varying from 0-100%.
Figure 40: Brake drive PWM waveform.
Figure 41: Servo PWM waveform.

41
Further brake drive verification was conducted, measuring the DC voltage at the base of the main power transistor to ensure it was correct. The output waveform can be seen in Figure X. The sawtooth nature is a result of insufficient filtering in the conversion of the PWM drive signal to a DC voltage and can be mitigated by decreasing the 3 dB frequency of the filter or reducing the frequency of the drive signal.
Figure 42: Brake drive DC drive signal.
At this point, a full system test was conducted since the most critical functions had been verified. This test verified hall effect sensor performance, engine kill switch functionality, thermistor and IR temperature sensor measurements, and load cell and torque transducer operation. Software validation was performed to ensure the data being recorded was being logged correctly on the system’s SD card for storage. Data from each test is written to a CSV file designed to work with a MATLAB data processing script, which processes raw data and plots and saves it for the user to analyze. Output data from a system test run without the hysteresis brake can be seen below in Figures X through X.
Figure 43: Load cell data.

42
Figure 44: RPM data.
Figure 45: Hysteresis brake current data.
7. Future Work The current state of the project allows for easy implementation of the incoming hysteresis brake. All critical mounting components have been designed with adjustability to allow for any slight variation in product dimensions. Once the brake is integrated, testing can begin to verify mathematical models and ensure all components operate as intended. The CVT case design will be passed on to members of the Northeastern Baja team to fabricate and mount to the system. As mentioned previously, the friction brake was a timely solution to misinformation regarding the hysteresis brake’s maximum torque and ability to stall. Ideally a reduction between the secondary and hysteresis brake would be used to bring the torque to a suitable range, however, there were no plausible off the shelf options. Given more time and resources, a custom highspeed gearbox could be designed and manufactured to achieve this goal and further simplify the control steps.

43
8. Conclusion The Baja Capstone team is acting on a need to create a safer, more reliable dynamometer for testing the SAE-supplied engine in dynamic drivetrain loading patterns. Doing so allows current and future NU Baja teams to more accurately tune the transmission for optimal performance. A magnetic hysteresis brake is the power absorption unit in the final design. One unit has been fully fabricated, assembled, and tested including both mechanical and electrical systems. Software development is complete for the control system as well as the data processing. The system is ready for the arrival of the hysteresis brake; once it has arrived it can be installed, and regular use of the dynamometer can begin. The project has been completed successfully, providing the team with a tool which allows them to better understand operation of the CVT such that its performance can be optimized for years to come. Additional testing, such as custom brake thermal testing and CVT thermal testing can be performed, as well as engine performance analysis.
9. Intellectual Property 9.1 Description of Problem Develop a custom dynamometer to accurately simulate drivetrain loading experienced in various competition events.
9.2 Proof of Concept An effective dynamometer will allow for the custom continuous variable transmission developed last year to be tuned for the best performance in each loading scenario. The implementation of a controllable brake to mimic varying torques will be able test the transmission for all dynamic events rather than just a standard acceleration run as the current inertia dynamometer does. This will allow the team to score better dynamically as well as in design, where validation testing is often a weak point. Additionally, a dynamometer equipped with proper torque transducers will be able to quantitatively measure drivetrain efficiency more accurately than on the car.
9.3 Progress to Date The scope of the project was narrowed down and background research on dynamometer was conducted. The gathered information on power absorbers were used in a decision matrix to determine optimal brake type. The water brake and hysteresis brake were selected for further exploration. Ultimately, the hysteresis brake was chosen. The schematics for the electrical and controls system were completed. Initial designs for the chassis, belt tensioner, automatic throttle and torque arm were started. A bill of materials was created and presented to advisors. A basic MATLAB model was created to simulate the braking torque required for an acceleration run. Gantt chart was updated to keep the group on schedule and determine critical components for future work.

44
9.4 Individual Contributions All group members have contributed to the project thus far. The members meet weekly to present research found and discuss plans for the next week. All members met with both advisors, Professor Gouldstone and Professor Kumar, to discuss scope and ultimate goals for the project. Each member has contributed to design decisions, CAD, and manufacture of the project. The schematics, wiring, and software development for the electrical and controls system were completed by Kienan Mooney. Max Gieraltowski designed and assembled the chassis and gas tank mounting. Ben Lerman created the mathematical MATLAB model of the system dynamics as well as designed the adjustable center to center mechanism. Savannah Page designed the automatic throttle and friction brake assembly. Dylan Rogers designed the mounted torque arm for the hysteresis brake assembly as well as updated the Gantt chart to keep the team on schedule. Furthermore, all members have contributed equally to report and presentation.
9.5 Future Work The missing hysteresis brake will be integrated and tested to confirm function and mathematical models. Additionally, a CVT case will be manufactured.
10. References [1] Nissan's Next Generation CVT. [Film]. Autoblog, 2011. [2] Yamaha Motor Corporation, "Easy-to-Use CVT Equipped Engines," [Online]. Available: global.yamaha-motor.com. [3] “Chassis Dynamometer.” Banks Power, 2005, http://assets.bankspower.com/mag_inline_images/1273/dyno-close.jpg. Accessed 9 Aug. 2018. [4] “Engine Dynamometer.” Ierace Automotive, May 2014, https://www.ieraceautomotive.com.au/wp-content/uploads/2014/05/Modular-1.jpg. Accessed 9 Aug. 2018. [5] Tobias Düser, Hans Olms, Anita Haase, Roland von Gavel, Christoph Schmidt, Uwe Schmidt, "Vehicle Chassis Dynamometer", Units under test, (Süddeutscher Verlag onpact, Munich 2011) page 7. [6] “Snowmobile Dyno Absorber.” DYNOmite Dynamometer, https://www.dynomitedynamometer.com/snowmobile-dyno/snowmobile-dyno.htm. Accessed 9 Aug. 2018. [7] M. Kilzer, “Data Acquisition Unit for A CVT Dynamometer ,” May-2013. [Online]. Available: https://people.ece.cornell.edu/land/courses/eceprojectsland/STUDENTPROJ/2012to2013/mjk277/mjk277_report_201305160224.pdf. [Accessed: Aug-2018]. [8] YouTube, 09-Feb-2011. [Online]. Available: https://www.youtube.com/watch?v=GRwAmQ9WsaE. [Accessed: 13-Aug-2018].

45
[9] E. Payne, “Design of an SAE Baja Racing Off-Road Vehicle Powertrain,” 2015. [Online]. Available: http://ideaexchange.uakron.edu/cgi/viewcontent.cgi?article=1146&context=honors_research_projects. [Accessed: Aug-2018]. [10] “Principles of Hysteresis.” Magtrol, https://www.magtrol.com/wp-content/uploads/hb-mhb.pdf. Accessed 9 Aug. 2018. [11] Narayan Rao, N., "The Basic Theory of Hydraulic Dynamometers and Retarders," SAE Technical Paper 680178, 1968, https://doi.org/10.4271/680178. [12] “Toroid Siamese-Rotor Water-Brake Absorber.” DYNOmite Dynamometer, https://www.dynomitedynamometer.com/absorber/dynamometer_water-brake_absorber.htm. Accessed 9 Aug. 2018. [13] “Dynamometer Description.” SportDevices, 25 Aug. 2003, http://www.sportdevices.co.uk/dyno/sp3_friction.htm. Accessed 9 Aug. 2018. [14] “Eddy-Current Power Absorption Unit.” Super Street, 25 Jul. 2011, http://www.superstreetonline.com/how-to/additional-tech/modp-1108-a-true-rolling-road/. Accessed 9 Aug. 2018. [15] M.A. Heald (1988) "Magnetic braking: Improved theory", American Journal of Physics 56: 521–2 [16] Morgan, Evan. “Inertia Dynamometer with Steel Flywheel.” Morgan Dyno Testing, Geocities.ws, http://www.geocities.ws/chchgrasskarts/Morgan.html. Accessed 9 Aug. 2018. [17] Maitree N. and Kunanoppadol J., “Design of Inertia Dynamometer for Single-Cylinder Engine,” in Proceedings of the 6th International Conference on Science, Technology and Innovation for Sustainable Well-Being, August 28-30, 2014, Siem Reap, Kingdom of Cambodia [Online]. Available: ResearchGate, https://www.researchgate.net/publication/277828732_Design_of_Inertia_Dynamometer_for_Single-cylinder_Engine. Accessed 23 Jul. 2018. [18] “AC Generator Dynamometer Coupled to a Small Engine.” DYNOmite Dynamometer, https://www.dynomitedynamometer.com/ac_dynamometer/ac-dynamometer.htm. Accessed 9 Aug. 2018. [19] Lutz, M., “DESIGN AND CONSTRUCTION OF ELECTRIC MOTOR DYNAMOMETER AND GRID ATTACHED STORAGE LABORATORY”, Colorado State University, 2011, https://dspace.library.colostate.edu/bitstream/handle/10217/48206/Lutz_colostate_0053N_10718.pdf?sequence=1

46
[20] “ESP32 SoC Block Diagram.” ESP32, http://esp32.net/images/_resources/ESP32_Function_Block_Diagram.svg. Accessed 9 Aug. 2018. [21] Baja SAE Collegiate Design Series Rules. [Online]. Available: http://www.bajasae.net/cdsweb/gen/DocumentResources.aspx. Accessed 27 Sept. 2018.
[22] Pepper, Robert. “Continuously Variable Transmission (CVT) Explained.” Practical Motoring, 16 July 2015, practicalmotoring.com.au/car-advice/continuously-variable-transmission-explained/. [23] Polnerow, D., & White, M. (2016, September 2). Characterizing the Efficiency of a Continuously Variable Transmission with Respect to Belt Tension [Scholarly project]. Retrieved October 12, 2018.

![[Please list the analysis conducted] - Baja SAEbajasae.net/content/2017-BajaSAE_Redesign_Comparison... · Web view2017 Baja SAE Design Comparison Document 2017 Baja SAE Design Comparison](https://img.pdfslide.us/doc/110x75/5ab1e61b7f8b9a284c8d1130/please-list-the-analysis-conducted-baja-view2017-baja-sae-design-comparison.jpg)


![[Please list the analysis conducted] - Baja SAE Baja SAE Redesign Comparison... · Web view2016 Baja SAE Design Comparison Document 2016 Baja SAE Design Comparison Document 2016 Baja](https://img.pdfslide.us/doc/110x75/5ab1e61b7f8b9a284c8d112e/please-list-the-analysis-conducted-baja-baja-sae-redesign-comparisonweb-view2016.jpg)