Embed Size (px)
Citation preview

Research ArticleDynamic Response of Parallel Hoisting System underDrive Deviation between Ropes with Time-Varying Length
Guohua Cao12 Xiang Cai12 Naige Wang12 Weihong Peng3 and Jishun Li4
1School of Mechatronic Engineering China University of Mining and Technology Xuzhou 221116 China2Jiangsu Key Laboratory of Mine Mechanical and Electrical Equipment China University of Mining and TechnologyXuzhou 221116 China3School of Mechanics and Civil Engineering China University of Mining and TechnologyXuzhou 221116 China4State Key Laboratory of Heavy Mining Equipment Luoyang 471039 China
Correspondence should be addressed to Guohua Cao caoguohuacumteducn
Received 12 September 2016 Revised 6 December 2016 Accepted 21 December 2016 Published 29 January 2017
Academic Editor Carlo Trigona
Copyright copy 2017 Guohua Cao et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The dynamic responses of parallel hoisting system with time-varying length and rigid guidance under drive deviation areinvestigated considering tension and torsion characteristics of the ropes The variable-domain three-node elements of rope areemployed and the corresponding differential algebraic equations (DAEs) are derived using Lagrangersquos equations of the first kindThe slack situation of the rope is considered and the dynamic equations which are systems of DAEs are transformed to ordinarydifferential equations (ODEs) The dynamic responses of tension torsion and acceleration are analyzed considering radiusrsquo errorof the drums which indicates that the drive deviation between ropes can cause large influence on the tension difference and evencause one of the ropes to slack However the torsion of the corresponding rope is active And unreasonable discordance betweenropes should be controlled for the design and manufacture of drum on super deep parallel hoisting system
1 Introduction
Parallel hoisting system which has the advantage of largecarrying capacity small rotation of conveyance excellentsecurity performance andfine economic performanceworksat themanner that one conveyance is hoisted cooperatively byseveral cables [1] Parallel hoisting system is widely used dueto the increase of lifting heavy and large volume loads such aselevator hoisting system (Figure 1(a)) mine hoisting system(Figure 1(b)) and parallel suspension platform of verticalshaft in construction
The parallel hoisting system will vibrate subject to theexcitation sources including ripple of the motor turbulenceof transmission device abrasion of winding drum and theeccentricity of head sheave These vibrations will affect thestability of the conveyance and may also cause damage to theropes which will further lead to accidents
Dynamic characteristics of single rope hoisting sys-tem with time-varying length have been studied by many
researchers Zhu andNi investigated the linear lateral dynam-ics of beam and string with an arbitrarily varying lengthby Hamiltonrsquos principle and Galerkinrsquos method [2] Kacz-marczyk and Ostachowicz described the coupled lateralndashlongitudinal dynamic response of the cables in deep minehoisting system with a depth of 2085m and formulated adiscretemathematicalmodel by RayleighndashRitz procedure [3]Wang et al investigated the lateral response of the movinghoisting conveyance in cable-guided hoisting system [4] Allof these researches in hoisting system with single cable arethe foundations for the dynamic research of parallel hoistingsystem
As the application of parallel hoisting systems is increas-ing people are paying more and more attention on itsresearch Zhu and Ren developed a spatial discretizationand substructure method to accurately calculate the dynamicresponses of single and multiple suspension cables withlength-variant distributed-parameter components which
HindawiShock and VibrationVolume 2017 Article ID 6837697 10 pageshttpsdoiorg10115520176837697
2 Shock and Vibration
Conveyance
Hoisting ropes
Drum
Head sheave
Traction sheave
Guide sheave
Balance weight
Tail ropes
(a) Elevator hoisting system (b) Mine hoisting system
Figure 1 Parallel hoisting system
simplified the handle of boundary conditions [5] References[6ndash9] investigated the dynamics of cable-suspended parallelsystem but the vibrations of cables themselves are notconsidered So it could not get accurate results Shao et alinvestigated the dynamics of a sinking winch mechanismin the framework of nonsmooth dynamics considering theunilateral property of cable and presented a numerical sim-ulation method which is suitable for the dynamic analysis ofthe sinking winch mechanism [10] Du et al addressed thedynamic modeling of large CDPMs using a variable-domainfinite element method the effects of cable length variationand the resultingmass variation are also considered [1]Wanget al established the longitudinal vibration model of parallelhoisting system with tension autobalance device attached tothe ends of all hoisting ropes and showed the influence onlongitudinal response of different coefficients and excitations[11]
Finite element method (FEM) as a well-known and effi-cient numerical method has been widely used in engineeringproblems [12] It can be used to deal with the dynamicproblem of continuum [13] Stylianou and Tabarrok analyzedthe dynamic characteristic of an axially moving beam [14 15]Wang et al investigated three-dimensional vibrations of anunderwater geometrically nonlinear cable with a weight atthe lower end [16] Moustafa et al considered the modelingproblem of the dynamics of overhead cranes with flexiblecable and load hoisting or lowering during crane travel [17]All these researches are investigated by variable-domain FEM(Vd-FEM)The Vd-FEM does not need to find trial functionsto satisfy the boundary conditions while shape functionsare used as interpolation functions And the displacementboundary conditions at upper ends of cables can be satisfiedaccurately by modifying the global matrix properly
Wire rope for its complex helical structure will producetwist motion or torsion under axial load Costello derived thecoupled stiffness coefficient of wire rope which can be usedto express the relation between axial force and torsion withstrain [18] Thus when ropes vibrate longitudinally the tor-sional vibrations will also occurred The different upper ends
Front view Top view
Rigid guidance
Conveyance
Spring-damper
li(t)
120593c
OcOc
xc
ycyc
120579c
x
zc
Figure 2 Model of parallel hoisting system
excitations will cause different tension and torsion of ropesThe torsion difference will cause the conveyance rotatingaround the vertical axis and tension difference in ropes alsocauses the conveyance rotating around the horizontal axisSometimes the rotation of conveyance can be uncomfortablefor the passengers or even damage the guide devices In thispaper the dynamic responses of parallel hoisting systemwithtime-varying length and rigid guidance under drive deviationare investigated considering tension and torsion character-istics of ropes The variable-domain three-node elements ofrope are used and the corresponding differential algebraicequations (DAEs) are derived by Lagrangersquos equations of thefirst kind which are for working out several challengingproblems including the tensions and torsions between theconveyance and cables and the conveyance motion Thedynamic responses of parallel hoisting system are discussedby considering radiusrsquo error of drum
2 Model for Parallel Hoisting System
21 Description of Parallel Hoisting System Parallel hoistingsystem depicted in Figure 1 can be simplified as 119896 parallelropes with an attached conveyance which is restrained byrigid guidance where 119896 is the number of hoisting ropesas shown in Figure 2 Length of each rope is 119897(119905) at time 119905excluding the excitation at upper end The vertically trans-lating velocity and acceleration of ropes are V(119905) = 119897(119905) and119886(119905) = 119897(119905) where the overdot denotes time differentiationand the same representation is used as follows119890119894(119905) represents the longitudinal drive deviation on 119894thrope at upper end which might be caused by the radiusrsquoerror or irregular outline of drum 120579119888 and 120593119888 denote the angledisplacements of conveyance about vertical axis 119909119888 and hori-zontal axis 119911119888 as shown in Figure 2The following assumptionsconstrain the analysis (1) Guidance devices are always keep-ing in touch with rigid guidance under preload (2) the wholefriction can be neglected (3) the influence of lateral vibrationof rope on the system is small enough to be neglected (4) theropesrsquo mechanical parameters remain constant
22 Equations of Motion The kinetic energy of the 119896 ropesand conveyance is given by
Shock and Vibration 3
TM M
T
ui2jminus1
120579i2jminus1
ui2j
120579i2j
ui2j+1
120579i2j+1
ui2j+1
120579i2j+1
ui2j+2
120579i2j+2
ui2j+3
120579i2j+3
Figure 3 Three-node element of rope
119879 = 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899120588 (119863119906119894119863119905 + V)
2
d119909
+ 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899119869 (119863120579119894119863119905 )
2
d119909
+ 12119898119888 (119888 + V)2 +121198691198881199092
119888 + 121198691198881199112119888
(1)
where 119899 is the number of elements in each rope 120588 is densityof hoisting rope per unit length 119869 is the moment of inertiaof hoisting rope about its central axis and 119895 denotes the 119895thelement of the ropes119898119888 119869119888119909 and 119869119888119911 aremass and themomentof inertia about its vertical and horizontal axis of conveyancerespectively 119906119888 is the dynamic longitudinal displacement ofconveyance The operator 119863119863119905 is given by 119863119863119905 = 120597120597119905 +V(120597120597119909)
In (1) 119906119894 and 120579119894 are given as
119906119894 (119909 119905) = N119895 (119909 119897 (119905)) q119894119895 (119905) 120579119894 (119909 119905) = N119895 (119909 119897 (119905)) p119894119895 (119905)
119909119895 le 119909 le 119909119895+1 119895 = 1 2 119899(2)
where q119894119895(119905) = [1199061198942119895minus1 1199061198942119895 1199061198942119895+1]T and p119894119895(119905) =[1205791198942119895minus1 1205791198942119895 1205791198942119895+1]T are longitudinal and torsional dis-placement vectors N119895(119909 119897) = [1198731198951 1198731198952 1198731198953] is shapefunction matrix depending on 119897(119905) where 1198731198951 = 21198952 minus 119895 +119899119909(1minus4119895)119897+2(119899119909119897)21198731198952 = 4[119895minus1198952+119899119909(2119895minus1)119897minus(119899119909119897)2]and1198731198953 = 1 minus 3119895 + 21198952 + 119899119909(3 minus 4119895)119897 + 2(119899119909119897)2
The 119895th and (119895 + 1)th elements of 119894th rope are shownin Figure 3 in which 119879 and M are the tension and torsionbetween the two elements
Considering the dynamic displacement and static elasticdeformation the strain energy of the hoisting system isformulated as
119864119890= 119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
[(119879119888119894 + 12119879119889119894 ) 120576119894 + (119872119888119894 +12119872119889119894 )120601119894] d119909
+ 8 sdot 12119896119888 (1199031120579119888)2 + 4 sdot12119896119888 (1199032120593119888)2
(3)
where 120576119894 = 119906119894119909 and 120601119894 = 120579119894119909 denote the longitudinaland torsional strain respectively where the subscript 119909denotes partial differentiation with respect to 119909 and the
same representation is used as followsThe static tension andtorsion in 119894th rope can be expressed as
119879119888119894 = 120588 (119897 (119905) minus 119909) 119892 + 119898119888119892119896 (4)
119872119888119894 = 119879119888119894 119876119888119894119876119886119894 (5)
The dynamic tension and torsion can be given respec-tively as
119879119889119894 = 119876119886119894 120576119894 + 119876119887119894 120601119894 (6)
119872119889119894 = 119876119888119894 120576119894 + 119876119889119894 120601119894 (7)
in which 119876119886119894 and 119876119889119894 denote longitudinal and torsional stiff-ness coefficients of 119894th rope respectively 119876119887119894 and 119876119888119894 denotethe coupled stiffness coefficient [18] 119896119888 is the equivalent stiff-ness of guide devices 1199031 is the horizontal distance betweenthe center of conveyance and rigid guidance 1199032 is the verticaldistance between guide devices and the center of conveyance
Setting the initial position as the place of zero gravita-tional potential energy the gravitational potential energy ofsystem can be written as
119864119892 = minus119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
120588119892119906119894d119909 minus 119898119888119892119906119888 (8)
According to the viscoelastic properties of wire rope [19]the equivalent external nodal load on the 119895th element of 119894thrope is formulated as
f119890119906119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891119906119888N119879119895 d119909
f119890120579119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891120579119888N119879119895 d119909(9)
where 119891119906119888 = 120577119906(119876119886119894 120576119894119905 + 119876119887119894 120601119894119905) 119891120579119888 = 120577120579(119876119888119894 120576119894119905 + 119876119889119894 120601119894119905) and120577119906 and 120577120579 are longitudinal and torsional damping coefficientsrespectively
The global equivalent external nodal load can be obtainedassum f119890119906119895 andsum f119890120579119895 wheresum denotes the assembly operator ofthe Vd-FEM
The damping force of guide device on conveyance is givenas
119865119890120579119888 = minus81198881198881199031119888119865119890120593119888 = minus41198881198881199032119888 (10)
where 119888119888 is equivalent damping of guide devices
4 Shock and Vibration
Since 120593119888 is very small it can be obtained approximately bythe dynamic displacement of the lower ends of ropes as
1198921 = 120593119888 minus (11990612119899+1 minus 11990622119899+1)119889 = 0 (11)
where 119889 is the distance between adjacent ropesThe geometric relationships between dynamic longitudi-
nal displacement of conveyance and k ropes at lower ends aregiven as
1198922 = 119906119888 minus (11990612119899+1 minus 119889120593119888 (119896 minus 1)2 ) = 0119892119894 = 1199061198942119899+1 minus (11990612119899+1 minus (119894 minus 1) 119889120593119888) = 0
119894 = 3 4 119896(12)
The dynamic torsional displacements of lower ends ofropes can be expressed by the rotation angle of conveyanceas
119892119896+119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 119896 (13)
Substituting (1)ndash(10) into Lagrangersquos equations of the firstkind [20]
119889d119905120597119879120597119894 minus
120597119879120597119876119894 +
120597 (119864119890 + 119864119892)120597119876119894 = 119865119890119894 +
2119896sum119895=1
120582119895 120597119892119895120597119876119894 (14)
and using a standard assembly procedure of the FEM [12]the dynamic equations of k ropes and conveyance without theexcitations at upper ends can be obtained as
MQ + CQ + KQ = F + G119879120582 (15)
g (Q 119905) = 0 (16)
which is a system of DAEs whereQ = [11990611 12057911 11990621 12057921 1199061198962119899+1 1205791198962119899+1 119906119888 120579119888 120593119888]T is the displacement vector of all thenodes on 119896 ropes and three degrees of freedomof conveyance
M = [M119863 M119888 ] C = [ C119863 C119888 ] K = [ K119863 K119888 ] andF = [FT119863 FT119888 ]T are the matrixes of mass damping stiffnessand force M119863 C119863 K119863 and F119863 are the global matrixes ofropes assembled from element matrixes which are listedin the Appendix And M119888 = diag (119898119888 119869119888119909 119869119888119911) C119888 =diag(0 811988811988811990321 411988811988811990322) K119888 = diag(0 811989611988811990321 411989611988811990322) and F119888 =[119898119888(119892 minus 119886) 0 0]T g(Q 119905) is a 2k-order vector whichincludes the constraint equations (11)ndash(13) G = 120597g120597Q 120582 =[1205821 1205822 sdot sdot sdot 1205822119896]T are Lagrange multipliers
Considering the followingDAEs calculation according to(11)ndash(13) the 2119896 times [2119896(2119899 + 1) + 3]matrixG can be written asG = [G0 G1] where G0 is 2119896 times (4119899119896 + 3) matrix and G1 is2119896 times 2119896matrix
Rewriting the displacement vector as Q = [QT0 QT1 ]T
where Q0 is a 4119899119896 + 3 vector and Q1 is a 2119896 vector henceQ can be expressed byQ0 as
Q = UQ0 (17)
where U = [ IminusGminus11G0 ] and I is 4119899119896 + 3 identity matrix
Differentiating (17) twice with respect to t yields
Q = UQ0Q = UQ0
(18)
Substituting (17) and (18) into (15) and premultiplyingit by UT the dynamic equations of ropes and conveyancewithout excitations at upper ends are formulated as
MQ0 + CQ0 + KQ0 = F (19)
which is a system of ordinary differential equations (ODEs)where M = UTMU C = UTCU K = UTKU and F = UTF
When longitudinal excitations 1199061198941 = 119890119894(119905) and torsionalconstraint 1205791198941 = 0 are imposed on the upper ends of ropesthe dynamic equations should be converted into the form asfollows
MQ0 + C Q0 + KQ0 = F (20)
whereMC andK are obtained from M C and K by deletingthe 1 to 2119896 rows and the 1 to 2119896 columns and Q0 is obtainedfrom Q0 by deleting the 1 to 2119896 row And F is obtained formF by the operation that
F119886 = F119886+2119896 minus119896sum119901=1
M119886+21198962119901minus1 119890119901 (119905) minus119896sum119901=1
C119886+21198962119901minus1 119890119901 (119905)
minus 119896sum119901=1
K119886+21198962119901minus1119890119901 (119905) (21)
where 119886 = 1 2 4119899119896 + 3 minus 211989623 Rope Slack Condition Now consider a conveyancehoisted by two ropes the dynamics of the systemwill bemorecomplex if one of ropes is slack due to the deviation of drumsOne rope is completely slack or tight which is judged by thetension at the connection point of the conveyance Beforethe rope is completely slack the dynamic response can beobtained by the equations derived before But if the slack ropeis completely slack the constraint condition between ropesand conveyance will change
When one rope is slack it will not bear loads fromthe conveyance while the torsion still exists Then thedynamic torsional displacements of lower ends of ropes canbe expressed by the rotation angle of conveyance as
119892119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 (22)
If rope 1 was slack the relationship between dynamiclongitudinal displacement of conveyance and ropes at lowerends can be given as
1198923 = 120593119888 + 2119889 (11990622119899+1 minus 119906119888) = 0 (23)
Shock and Vibration 5D
ispla
cem
entl(t)
(m)
0
300
600
900
1200
1500
20 40 60 80 1000Time t (s)
(a)
0
2
4
6
8
10
12
14
16
18
Velo
city
(t)
(ms
)
20 40 60 80 1000Time t (s)
(b)
minus10
minus05
00
05
10
20 40 60 80 1000Time t (s)
Acce
lera
tiona(t)
(ms
2)
(c)
Figure 4 Prescribed movement profiles
For the convenient of dealing with the constraint condi-tion the sequence of elements in Q is transformed and theexpression of G0 can be expressed as
G014(2119899)+2 = G024(2119899)+2 = minus1G034(2119899)+3 = minusG034(2119899)+4 = 2119889
(24)
The process of transforming DAEs to ODEs and obtain-ing the solution is the same as above and it could be solvedby Newmark-120573method
3 Results and Analysis
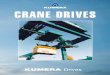
31 Parameters In mine hoisting system travelling distanceranges is large and continuously being increased For exam-ple in the South African gold mining industry the depth ofKloof Gold Mine shaft is 2085m and the hoisting distanceof South Deep Gold Mine has reached 3000m Now inChina new mines with shaft depths in the region of 1000ndash2000m based on parallel hoisting system have recently beenconsidered for examplemine shafts inChihong and Linyi Inthis section two-rope parallel hoisting system is discussedThe initial and maximum lengths of ropes are reset as 30mand 1566m respectively The downward movement profilesare shown in Figure 4
6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
Conveyance
Hoisting ropes
Drum
Head sheave
Traction sheave
Guide sheave
Balance weight
Tail ropes
(a) Elevator hoisting system (b) Mine hoisting system
Figure 1 Parallel hoisting system
simplified the handle of boundary conditions [5] References[6ndash9] investigated the dynamics of cable-suspended parallelsystem but the vibrations of cables themselves are notconsidered So it could not get accurate results Shao et alinvestigated the dynamics of a sinking winch mechanismin the framework of nonsmooth dynamics considering theunilateral property of cable and presented a numerical sim-ulation method which is suitable for the dynamic analysis ofthe sinking winch mechanism [10] Du et al addressed thedynamic modeling of large CDPMs using a variable-domainfinite element method the effects of cable length variationand the resultingmass variation are also considered [1]Wanget al established the longitudinal vibration model of parallelhoisting system with tension autobalance device attached tothe ends of all hoisting ropes and showed the influence onlongitudinal response of different coefficients and excitations[11]
Finite element method (FEM) as a well-known and effi-cient numerical method has been widely used in engineeringproblems [12] It can be used to deal with the dynamicproblem of continuum [13] Stylianou and Tabarrok analyzedthe dynamic characteristic of an axially moving beam [14 15]Wang et al investigated three-dimensional vibrations of anunderwater geometrically nonlinear cable with a weight atthe lower end [16] Moustafa et al considered the modelingproblem of the dynamics of overhead cranes with flexiblecable and load hoisting or lowering during crane travel [17]All these researches are investigated by variable-domain FEM(Vd-FEM)The Vd-FEM does not need to find trial functionsto satisfy the boundary conditions while shape functionsare used as interpolation functions And the displacementboundary conditions at upper ends of cables can be satisfiedaccurately by modifying the global matrix properly
Wire rope for its complex helical structure will producetwist motion or torsion under axial load Costello derived thecoupled stiffness coefficient of wire rope which can be usedto express the relation between axial force and torsion withstrain [18] Thus when ropes vibrate longitudinally the tor-sional vibrations will also occurred The different upper ends
Front view Top view
Rigid guidance
Conveyance
Spring-damper
li(t)
120593c
OcOc
xc
ycyc
120579c
x
zc
Figure 2 Model of parallel hoisting system
excitations will cause different tension and torsion of ropesThe torsion difference will cause the conveyance rotatingaround the vertical axis and tension difference in ropes alsocauses the conveyance rotating around the horizontal axisSometimes the rotation of conveyance can be uncomfortablefor the passengers or even damage the guide devices In thispaper the dynamic responses of parallel hoisting systemwithtime-varying length and rigid guidance under drive deviationare investigated considering tension and torsion character-istics of ropes The variable-domain three-node elements ofrope are used and the corresponding differential algebraicequations (DAEs) are derived by Lagrangersquos equations of thefirst kind which are for working out several challengingproblems including the tensions and torsions between theconveyance and cables and the conveyance motion Thedynamic responses of parallel hoisting system are discussedby considering radiusrsquo error of drum
2 Model for Parallel Hoisting System
21 Description of Parallel Hoisting System Parallel hoistingsystem depicted in Figure 1 can be simplified as 119896 parallelropes with an attached conveyance which is restrained byrigid guidance where 119896 is the number of hoisting ropesas shown in Figure 2 Length of each rope is 119897(119905) at time 119905excluding the excitation at upper end The vertically trans-lating velocity and acceleration of ropes are V(119905) = 119897(119905) and119886(119905) = 119897(119905) where the overdot denotes time differentiationand the same representation is used as follows119890119894(119905) represents the longitudinal drive deviation on 119894thrope at upper end which might be caused by the radiusrsquoerror or irregular outline of drum 120579119888 and 120593119888 denote the angledisplacements of conveyance about vertical axis 119909119888 and hori-zontal axis 119911119888 as shown in Figure 2The following assumptionsconstrain the analysis (1) Guidance devices are always keep-ing in touch with rigid guidance under preload (2) the wholefriction can be neglected (3) the influence of lateral vibrationof rope on the system is small enough to be neglected (4) theropesrsquo mechanical parameters remain constant
22 Equations of Motion The kinetic energy of the 119896 ropesand conveyance is given by
Shock and Vibration 3
TM M
T
ui2jminus1
120579i2jminus1
ui2j
120579i2j
ui2j+1
120579i2j+1
ui2j+1
120579i2j+1
ui2j+2
120579i2j+2
ui2j+3
120579i2j+3
Figure 3 Three-node element of rope
119879 = 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899120588 (119863119906119894119863119905 + V)
2
d119909
+ 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899119869 (119863120579119894119863119905 )
2
d119909
+ 12119898119888 (119888 + V)2 +121198691198881199092
119888 + 121198691198881199112119888
(1)
where 119899 is the number of elements in each rope 120588 is densityof hoisting rope per unit length 119869 is the moment of inertiaof hoisting rope about its central axis and 119895 denotes the 119895thelement of the ropes119898119888 119869119888119909 and 119869119888119911 aremass and themomentof inertia about its vertical and horizontal axis of conveyancerespectively 119906119888 is the dynamic longitudinal displacement ofconveyance The operator 119863119863119905 is given by 119863119863119905 = 120597120597119905 +V(120597120597119909)
In (1) 119906119894 and 120579119894 are given as
119906119894 (119909 119905) = N119895 (119909 119897 (119905)) q119894119895 (119905) 120579119894 (119909 119905) = N119895 (119909 119897 (119905)) p119894119895 (119905)
119909119895 le 119909 le 119909119895+1 119895 = 1 2 119899(2)
where q119894119895(119905) = [1199061198942119895minus1 1199061198942119895 1199061198942119895+1]T and p119894119895(119905) =[1205791198942119895minus1 1205791198942119895 1205791198942119895+1]T are longitudinal and torsional dis-placement vectors N119895(119909 119897) = [1198731198951 1198731198952 1198731198953] is shapefunction matrix depending on 119897(119905) where 1198731198951 = 21198952 minus 119895 +119899119909(1minus4119895)119897+2(119899119909119897)21198731198952 = 4[119895minus1198952+119899119909(2119895minus1)119897minus(119899119909119897)2]and1198731198953 = 1 minus 3119895 + 21198952 + 119899119909(3 minus 4119895)119897 + 2(119899119909119897)2
The 119895th and (119895 + 1)th elements of 119894th rope are shownin Figure 3 in which 119879 and M are the tension and torsionbetween the two elements
Considering the dynamic displacement and static elasticdeformation the strain energy of the hoisting system isformulated as
119864119890= 119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
[(119879119888119894 + 12119879119889119894 ) 120576119894 + (119872119888119894 +12119872119889119894 )120601119894] d119909
+ 8 sdot 12119896119888 (1199031120579119888)2 + 4 sdot12119896119888 (1199032120593119888)2
(3)
where 120576119894 = 119906119894119909 and 120601119894 = 120579119894119909 denote the longitudinaland torsional strain respectively where the subscript 119909denotes partial differentiation with respect to 119909 and the
same representation is used as followsThe static tension andtorsion in 119894th rope can be expressed as
119879119888119894 = 120588 (119897 (119905) minus 119909) 119892 + 119898119888119892119896 (4)
119872119888119894 = 119879119888119894 119876119888119894119876119886119894 (5)
The dynamic tension and torsion can be given respec-tively as
119879119889119894 = 119876119886119894 120576119894 + 119876119887119894 120601119894 (6)
119872119889119894 = 119876119888119894 120576119894 + 119876119889119894 120601119894 (7)
in which 119876119886119894 and 119876119889119894 denote longitudinal and torsional stiff-ness coefficients of 119894th rope respectively 119876119887119894 and 119876119888119894 denotethe coupled stiffness coefficient [18] 119896119888 is the equivalent stiff-ness of guide devices 1199031 is the horizontal distance betweenthe center of conveyance and rigid guidance 1199032 is the verticaldistance between guide devices and the center of conveyance
Setting the initial position as the place of zero gravita-tional potential energy the gravitational potential energy ofsystem can be written as
119864119892 = minus119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
120588119892119906119894d119909 minus 119898119888119892119906119888 (8)
According to the viscoelastic properties of wire rope [19]the equivalent external nodal load on the 119895th element of 119894thrope is formulated as
f119890119906119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891119906119888N119879119895 d119909
f119890120579119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891120579119888N119879119895 d119909(9)
where 119891119906119888 = 120577119906(119876119886119894 120576119894119905 + 119876119887119894 120601119894119905) 119891120579119888 = 120577120579(119876119888119894 120576119894119905 + 119876119889119894 120601119894119905) and120577119906 and 120577120579 are longitudinal and torsional damping coefficientsrespectively
The global equivalent external nodal load can be obtainedassum f119890119906119895 andsum f119890120579119895 wheresum denotes the assembly operator ofthe Vd-FEM
The damping force of guide device on conveyance is givenas
119865119890120579119888 = minus81198881198881199031119888119865119890120593119888 = minus41198881198881199032119888 (10)
where 119888119888 is equivalent damping of guide devices
4 Shock and Vibration
Since 120593119888 is very small it can be obtained approximately bythe dynamic displacement of the lower ends of ropes as
1198921 = 120593119888 minus (11990612119899+1 minus 11990622119899+1)119889 = 0 (11)
where 119889 is the distance between adjacent ropesThe geometric relationships between dynamic longitudi-
nal displacement of conveyance and k ropes at lower ends aregiven as
1198922 = 119906119888 minus (11990612119899+1 minus 119889120593119888 (119896 minus 1)2 ) = 0119892119894 = 1199061198942119899+1 minus (11990612119899+1 minus (119894 minus 1) 119889120593119888) = 0
119894 = 3 4 119896(12)
The dynamic torsional displacements of lower ends ofropes can be expressed by the rotation angle of conveyanceas
119892119896+119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 119896 (13)
Substituting (1)ndash(10) into Lagrangersquos equations of the firstkind [20]
119889d119905120597119879120597119894 minus
120597119879120597119876119894 +
120597 (119864119890 + 119864119892)120597119876119894 = 119865119890119894 +
2119896sum119895=1
120582119895 120597119892119895120597119876119894 (14)
and using a standard assembly procedure of the FEM [12]the dynamic equations of k ropes and conveyance without theexcitations at upper ends can be obtained as
MQ + CQ + KQ = F + G119879120582 (15)
g (Q 119905) = 0 (16)
which is a system of DAEs whereQ = [11990611 12057911 11990621 12057921 1199061198962119899+1 1205791198962119899+1 119906119888 120579119888 120593119888]T is the displacement vector of all thenodes on 119896 ropes and three degrees of freedomof conveyance
M = [M119863 M119888 ] C = [ C119863 C119888 ] K = [ K119863 K119888 ] andF = [FT119863 FT119888 ]T are the matrixes of mass damping stiffnessand force M119863 C119863 K119863 and F119863 are the global matrixes ofropes assembled from element matrixes which are listedin the Appendix And M119888 = diag (119898119888 119869119888119909 119869119888119911) C119888 =diag(0 811988811988811990321 411988811988811990322) K119888 = diag(0 811989611988811990321 411989611988811990322) and F119888 =[119898119888(119892 minus 119886) 0 0]T g(Q 119905) is a 2k-order vector whichincludes the constraint equations (11)ndash(13) G = 120597g120597Q 120582 =[1205821 1205822 sdot sdot sdot 1205822119896]T are Lagrange multipliers
Considering the followingDAEs calculation according to(11)ndash(13) the 2119896 times [2119896(2119899 + 1) + 3]matrixG can be written asG = [G0 G1] where G0 is 2119896 times (4119899119896 + 3) matrix and G1 is2119896 times 2119896matrix
Rewriting the displacement vector as Q = [QT0 QT1 ]T
where Q0 is a 4119899119896 + 3 vector and Q1 is a 2119896 vector henceQ can be expressed byQ0 as
Q = UQ0 (17)
where U = [ IminusGminus11G0 ] and I is 4119899119896 + 3 identity matrix
Differentiating (17) twice with respect to t yields
Q = UQ0Q = UQ0
(18)
Substituting (17) and (18) into (15) and premultiplyingit by UT the dynamic equations of ropes and conveyancewithout excitations at upper ends are formulated as
MQ0 + CQ0 + KQ0 = F (19)
which is a system of ordinary differential equations (ODEs)where M = UTMU C = UTCU K = UTKU and F = UTF
When longitudinal excitations 1199061198941 = 119890119894(119905) and torsionalconstraint 1205791198941 = 0 are imposed on the upper ends of ropesthe dynamic equations should be converted into the form asfollows
MQ0 + C Q0 + KQ0 = F (20)
whereMC andK are obtained from M C and K by deletingthe 1 to 2119896 rows and the 1 to 2119896 columns and Q0 is obtainedfrom Q0 by deleting the 1 to 2119896 row And F is obtained formF by the operation that
F119886 = F119886+2119896 minus119896sum119901=1
M119886+21198962119901minus1 119890119901 (119905) minus119896sum119901=1
C119886+21198962119901minus1 119890119901 (119905)
minus 119896sum119901=1
K119886+21198962119901minus1119890119901 (119905) (21)
where 119886 = 1 2 4119899119896 + 3 minus 211989623 Rope Slack Condition Now consider a conveyancehoisted by two ropes the dynamics of the systemwill bemorecomplex if one of ropes is slack due to the deviation of drumsOne rope is completely slack or tight which is judged by thetension at the connection point of the conveyance Beforethe rope is completely slack the dynamic response can beobtained by the equations derived before But if the slack ropeis completely slack the constraint condition between ropesand conveyance will change
When one rope is slack it will not bear loads fromthe conveyance while the torsion still exists Then thedynamic torsional displacements of lower ends of ropes canbe expressed by the rotation angle of conveyance as
119892119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 (22)
If rope 1 was slack the relationship between dynamiclongitudinal displacement of conveyance and ropes at lowerends can be given as
1198923 = 120593119888 + 2119889 (11990622119899+1 minus 119906119888) = 0 (23)
Shock and Vibration 5D
ispla
cem
entl(t)
(m)
0
300
600
900
1200
1500
20 40 60 80 1000Time t (s)
(a)
0
2
4
6
8
10
12
14
16
18
Velo
city
(t)
(ms
)
20 40 60 80 1000Time t (s)
(b)
minus10
minus05
00
05
10
20 40 60 80 1000Time t (s)
Acce
lera
tiona(t)
(ms
2)
(c)
Figure 4 Prescribed movement profiles
For the convenient of dealing with the constraint condi-tion the sequence of elements in Q is transformed and theexpression of G0 can be expressed as
G014(2119899)+2 = G024(2119899)+2 = minus1G034(2119899)+3 = minusG034(2119899)+4 = 2119889
(24)
The process of transforming DAEs to ODEs and obtain-ing the solution is the same as above and it could be solvedby Newmark-120573method
3 Results and Analysis
31 Parameters In mine hoisting system travelling distanceranges is large and continuously being increased For exam-ple in the South African gold mining industry the depth ofKloof Gold Mine shaft is 2085m and the hoisting distanceof South Deep Gold Mine has reached 3000m Now inChina new mines with shaft depths in the region of 1000ndash2000m based on parallel hoisting system have recently beenconsidered for examplemine shafts inChihong and Linyi Inthis section two-rope parallel hoisting system is discussedThe initial and maximum lengths of ropes are reset as 30mand 1566m respectively The downward movement profilesare shown in Figure 4
6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
TM M
T
ui2jminus1
120579i2jminus1
ui2j
120579i2j
ui2j+1
120579i2j+1
ui2j+1
120579i2j+1
ui2j+2
120579i2j+2
ui2j+3
120579i2j+3
Figure 3 Three-node element of rope
119879 = 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899120588 (119863119906119894119863119905 + V)
2
d119909
+ 119896sum119894=1
119899sum119895=1
12 int119895119897(119905)119899
(119895minus1)119897(119905)119899119869 (119863120579119894119863119905 )
2
d119909
+ 12119898119888 (119888 + V)2 +121198691198881199092
119888 + 121198691198881199112119888
(1)
where 119899 is the number of elements in each rope 120588 is densityof hoisting rope per unit length 119869 is the moment of inertiaof hoisting rope about its central axis and 119895 denotes the 119895thelement of the ropes119898119888 119869119888119909 and 119869119888119911 aremass and themomentof inertia about its vertical and horizontal axis of conveyancerespectively 119906119888 is the dynamic longitudinal displacement ofconveyance The operator 119863119863119905 is given by 119863119863119905 = 120597120597119905 +V(120597120597119909)
In (1) 119906119894 and 120579119894 are given as
119906119894 (119909 119905) = N119895 (119909 119897 (119905)) q119894119895 (119905) 120579119894 (119909 119905) = N119895 (119909 119897 (119905)) p119894119895 (119905)
119909119895 le 119909 le 119909119895+1 119895 = 1 2 119899(2)
where q119894119895(119905) = [1199061198942119895minus1 1199061198942119895 1199061198942119895+1]T and p119894119895(119905) =[1205791198942119895minus1 1205791198942119895 1205791198942119895+1]T are longitudinal and torsional dis-placement vectors N119895(119909 119897) = [1198731198951 1198731198952 1198731198953] is shapefunction matrix depending on 119897(119905) where 1198731198951 = 21198952 minus 119895 +119899119909(1minus4119895)119897+2(119899119909119897)21198731198952 = 4[119895minus1198952+119899119909(2119895minus1)119897minus(119899119909119897)2]and1198731198953 = 1 minus 3119895 + 21198952 + 119899119909(3 minus 4119895)119897 + 2(119899119909119897)2
The 119895th and (119895 + 1)th elements of 119894th rope are shownin Figure 3 in which 119879 and M are the tension and torsionbetween the two elements
Considering the dynamic displacement and static elasticdeformation the strain energy of the hoisting system isformulated as
119864119890= 119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
[(119879119888119894 + 12119879119889119894 ) 120576119894 + (119872119888119894 +12119872119889119894 )120601119894] d119909
+ 8 sdot 12119896119888 (1199031120579119888)2 + 4 sdot12119896119888 (1199032120593119888)2
(3)
where 120576119894 = 119906119894119909 and 120601119894 = 120579119894119909 denote the longitudinaland torsional strain respectively where the subscript 119909denotes partial differentiation with respect to 119909 and the
same representation is used as followsThe static tension andtorsion in 119894th rope can be expressed as
119879119888119894 = 120588 (119897 (119905) minus 119909) 119892 + 119898119888119892119896 (4)
119872119888119894 = 119879119888119894 119876119888119894119876119886119894 (5)
The dynamic tension and torsion can be given respec-tively as
119879119889119894 = 119876119886119894 120576119894 + 119876119887119894 120601119894 (6)
119872119889119894 = 119876119888119894 120576119894 + 119876119889119894 120601119894 (7)
in which 119876119886119894 and 119876119889119894 denote longitudinal and torsional stiff-ness coefficients of 119894th rope respectively 119876119887119894 and 119876119888119894 denotethe coupled stiffness coefficient [18] 119896119888 is the equivalent stiff-ness of guide devices 1199031 is the horizontal distance betweenthe center of conveyance and rigid guidance 1199032 is the verticaldistance between guide devices and the center of conveyance
Setting the initial position as the place of zero gravita-tional potential energy the gravitational potential energy ofsystem can be written as
119864119892 = minus119896sum119894=1
119899sum119895=1
int119895119897(119905)119899(119895minus1)119897(119905)119899
120588119892119906119894d119909 minus 119898119888119892119906119888 (8)
According to the viscoelastic properties of wire rope [19]the equivalent external nodal load on the 119895th element of 119894thrope is formulated as
f119890119906119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891119906119888N119879119895 d119909
f119890120579119895 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119891120579119888N119879119895 d119909(9)
where 119891119906119888 = 120577119906(119876119886119894 120576119894119905 + 119876119887119894 120601119894119905) 119891120579119888 = 120577120579(119876119888119894 120576119894119905 + 119876119889119894 120601119894119905) and120577119906 and 120577120579 are longitudinal and torsional damping coefficientsrespectively
The global equivalent external nodal load can be obtainedassum f119890119906119895 andsum f119890120579119895 wheresum denotes the assembly operator ofthe Vd-FEM
The damping force of guide device on conveyance is givenas
119865119890120579119888 = minus81198881198881199031119888119865119890120593119888 = minus41198881198881199032119888 (10)
where 119888119888 is equivalent damping of guide devices
4 Shock and Vibration
Since 120593119888 is very small it can be obtained approximately bythe dynamic displacement of the lower ends of ropes as
1198921 = 120593119888 minus (11990612119899+1 minus 11990622119899+1)119889 = 0 (11)
where 119889 is the distance between adjacent ropesThe geometric relationships between dynamic longitudi-
nal displacement of conveyance and k ropes at lower ends aregiven as
1198922 = 119906119888 minus (11990612119899+1 minus 119889120593119888 (119896 minus 1)2 ) = 0119892119894 = 1199061198942119899+1 minus (11990612119899+1 minus (119894 minus 1) 119889120593119888) = 0
119894 = 3 4 119896(12)
The dynamic torsional displacements of lower ends ofropes can be expressed by the rotation angle of conveyanceas
119892119896+119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 119896 (13)
Substituting (1)ndash(10) into Lagrangersquos equations of the firstkind [20]
119889d119905120597119879120597119894 minus
120597119879120597119876119894 +
120597 (119864119890 + 119864119892)120597119876119894 = 119865119890119894 +
2119896sum119895=1
120582119895 120597119892119895120597119876119894 (14)
and using a standard assembly procedure of the FEM [12]the dynamic equations of k ropes and conveyance without theexcitations at upper ends can be obtained as
MQ + CQ + KQ = F + G119879120582 (15)
g (Q 119905) = 0 (16)
which is a system of DAEs whereQ = [11990611 12057911 11990621 12057921 1199061198962119899+1 1205791198962119899+1 119906119888 120579119888 120593119888]T is the displacement vector of all thenodes on 119896 ropes and three degrees of freedomof conveyance
M = [M119863 M119888 ] C = [ C119863 C119888 ] K = [ K119863 K119888 ] andF = [FT119863 FT119888 ]T are the matrixes of mass damping stiffnessand force M119863 C119863 K119863 and F119863 are the global matrixes ofropes assembled from element matrixes which are listedin the Appendix And M119888 = diag (119898119888 119869119888119909 119869119888119911) C119888 =diag(0 811988811988811990321 411988811988811990322) K119888 = diag(0 811989611988811990321 411989611988811990322) and F119888 =[119898119888(119892 minus 119886) 0 0]T g(Q 119905) is a 2k-order vector whichincludes the constraint equations (11)ndash(13) G = 120597g120597Q 120582 =[1205821 1205822 sdot sdot sdot 1205822119896]T are Lagrange multipliers
Considering the followingDAEs calculation according to(11)ndash(13) the 2119896 times [2119896(2119899 + 1) + 3]matrixG can be written asG = [G0 G1] where G0 is 2119896 times (4119899119896 + 3) matrix and G1 is2119896 times 2119896matrix
Rewriting the displacement vector as Q = [QT0 QT1 ]T
where Q0 is a 4119899119896 + 3 vector and Q1 is a 2119896 vector henceQ can be expressed byQ0 as
Q = UQ0 (17)
where U = [ IminusGminus11G0 ] and I is 4119899119896 + 3 identity matrix
Differentiating (17) twice with respect to t yields
Q = UQ0Q = UQ0
(18)
Substituting (17) and (18) into (15) and premultiplyingit by UT the dynamic equations of ropes and conveyancewithout excitations at upper ends are formulated as
MQ0 + CQ0 + KQ0 = F (19)
which is a system of ordinary differential equations (ODEs)where M = UTMU C = UTCU K = UTKU and F = UTF
When longitudinal excitations 1199061198941 = 119890119894(119905) and torsionalconstraint 1205791198941 = 0 are imposed on the upper ends of ropesthe dynamic equations should be converted into the form asfollows
MQ0 + C Q0 + KQ0 = F (20)
whereMC andK are obtained from M C and K by deletingthe 1 to 2119896 rows and the 1 to 2119896 columns and Q0 is obtainedfrom Q0 by deleting the 1 to 2119896 row And F is obtained formF by the operation that
F119886 = F119886+2119896 minus119896sum119901=1
M119886+21198962119901minus1 119890119901 (119905) minus119896sum119901=1
C119886+21198962119901minus1 119890119901 (119905)
minus 119896sum119901=1
K119886+21198962119901minus1119890119901 (119905) (21)
where 119886 = 1 2 4119899119896 + 3 minus 211989623 Rope Slack Condition Now consider a conveyancehoisted by two ropes the dynamics of the systemwill bemorecomplex if one of ropes is slack due to the deviation of drumsOne rope is completely slack or tight which is judged by thetension at the connection point of the conveyance Beforethe rope is completely slack the dynamic response can beobtained by the equations derived before But if the slack ropeis completely slack the constraint condition between ropesand conveyance will change
When one rope is slack it will not bear loads fromthe conveyance while the torsion still exists Then thedynamic torsional displacements of lower ends of ropes canbe expressed by the rotation angle of conveyance as
119892119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 (22)
If rope 1 was slack the relationship between dynamiclongitudinal displacement of conveyance and ropes at lowerends can be given as
1198923 = 120593119888 + 2119889 (11990622119899+1 minus 119906119888) = 0 (23)
Shock and Vibration 5D
ispla
cem
entl(t)
(m)
0
300
600
900
1200
1500
20 40 60 80 1000Time t (s)
(a)
0
2
4
6
8
10
12
14
16
18
Velo
city
(t)
(ms
)
20 40 60 80 1000Time t (s)
(b)
minus10
minus05
00
05
10
20 40 60 80 1000Time t (s)
Acce
lera
tiona(t)
(ms
2)
(c)
Figure 4 Prescribed movement profiles
For the convenient of dealing with the constraint condi-tion the sequence of elements in Q is transformed and theexpression of G0 can be expressed as
G014(2119899)+2 = G024(2119899)+2 = minus1G034(2119899)+3 = minusG034(2119899)+4 = 2119889
(24)
The process of transforming DAEs to ODEs and obtain-ing the solution is the same as above and it could be solvedby Newmark-120573method
3 Results and Analysis
31 Parameters In mine hoisting system travelling distanceranges is large and continuously being increased For exam-ple in the South African gold mining industry the depth ofKloof Gold Mine shaft is 2085m and the hoisting distanceof South Deep Gold Mine has reached 3000m Now inChina new mines with shaft depths in the region of 1000ndash2000m based on parallel hoisting system have recently beenconsidered for examplemine shafts inChihong and Linyi Inthis section two-rope parallel hoisting system is discussedThe initial and maximum lengths of ropes are reset as 30mand 1566m respectively The downward movement profilesare shown in Figure 4
6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
Since 120593119888 is very small it can be obtained approximately bythe dynamic displacement of the lower ends of ropes as
1198921 = 120593119888 minus (11990612119899+1 minus 11990622119899+1)119889 = 0 (11)
where 119889 is the distance between adjacent ropesThe geometric relationships between dynamic longitudi-
nal displacement of conveyance and k ropes at lower ends aregiven as
1198922 = 119906119888 minus (11990612119899+1 minus 119889120593119888 (119896 minus 1)2 ) = 0119892119894 = 1199061198942119899+1 minus (11990612119899+1 minus (119894 minus 1) 119889120593119888) = 0
119894 = 3 4 119896(12)
The dynamic torsional displacements of lower ends ofropes can be expressed by the rotation angle of conveyanceas
119892119896+119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 119896 (13)
Substituting (1)ndash(10) into Lagrangersquos equations of the firstkind [20]
119889d119905120597119879120597119894 minus
120597119879120597119876119894 +
120597 (119864119890 + 119864119892)120597119876119894 = 119865119890119894 +
2119896sum119895=1
120582119895 120597119892119895120597119876119894 (14)
and using a standard assembly procedure of the FEM [12]the dynamic equations of k ropes and conveyance without theexcitations at upper ends can be obtained as
MQ + CQ + KQ = F + G119879120582 (15)
g (Q 119905) = 0 (16)
which is a system of DAEs whereQ = [11990611 12057911 11990621 12057921 1199061198962119899+1 1205791198962119899+1 119906119888 120579119888 120593119888]T is the displacement vector of all thenodes on 119896 ropes and three degrees of freedomof conveyance
M = [M119863 M119888 ] C = [ C119863 C119888 ] K = [ K119863 K119888 ] andF = [FT119863 FT119888 ]T are the matrixes of mass damping stiffnessand force M119863 C119863 K119863 and F119863 are the global matrixes ofropes assembled from element matrixes which are listedin the Appendix And M119888 = diag (119898119888 119869119888119909 119869119888119911) C119888 =diag(0 811988811988811990321 411988811988811990322) K119888 = diag(0 811989611988811990321 411989611988811990322) and F119888 =[119898119888(119892 minus 119886) 0 0]T g(Q 119905) is a 2k-order vector whichincludes the constraint equations (11)ndash(13) G = 120597g120597Q 120582 =[1205821 1205822 sdot sdot sdot 1205822119896]T are Lagrange multipliers
Considering the followingDAEs calculation according to(11)ndash(13) the 2119896 times [2119896(2119899 + 1) + 3]matrixG can be written asG = [G0 G1] where G0 is 2119896 times (4119899119896 + 3) matrix and G1 is2119896 times 2119896matrix
Rewriting the displacement vector as Q = [QT0 QT1 ]T
where Q0 is a 4119899119896 + 3 vector and Q1 is a 2119896 vector henceQ can be expressed byQ0 as
Q = UQ0 (17)
where U = [ IminusGminus11G0 ] and I is 4119899119896 + 3 identity matrix
Differentiating (17) twice with respect to t yields
Q = UQ0Q = UQ0
(18)
Substituting (17) and (18) into (15) and premultiplyingit by UT the dynamic equations of ropes and conveyancewithout excitations at upper ends are formulated as
MQ0 + CQ0 + KQ0 = F (19)
which is a system of ordinary differential equations (ODEs)where M = UTMU C = UTCU K = UTKU and F = UTF
When longitudinal excitations 1199061198941 = 119890119894(119905) and torsionalconstraint 1205791198941 = 0 are imposed on the upper ends of ropesthe dynamic equations should be converted into the form asfollows
MQ0 + C Q0 + KQ0 = F (20)
whereMC andK are obtained from M C and K by deletingthe 1 to 2119896 rows and the 1 to 2119896 columns and Q0 is obtainedfrom Q0 by deleting the 1 to 2119896 row And F is obtained formF by the operation that
F119886 = F119886+2119896 minus119896sum119901=1
M119886+21198962119901minus1 119890119901 (119905) minus119896sum119901=1
C119886+21198962119901minus1 119890119901 (119905)
minus 119896sum119901=1
K119886+21198962119901minus1119890119901 (119905) (21)
where 119886 = 1 2 4119899119896 + 3 minus 211989623 Rope Slack Condition Now consider a conveyancehoisted by two ropes the dynamics of the systemwill bemorecomplex if one of ropes is slack due to the deviation of drumsOne rope is completely slack or tight which is judged by thetension at the connection point of the conveyance Beforethe rope is completely slack the dynamic response can beobtained by the equations derived before But if the slack ropeis completely slack the constraint condition between ropesand conveyance will change
When one rope is slack it will not bear loads fromthe conveyance while the torsion still exists Then thedynamic torsional displacements of lower ends of ropes canbe expressed by the rotation angle of conveyance as
119892119894 = 1205791198942119899+1 minus 120579119888 = 0 119894 = 1 2 (22)
If rope 1 was slack the relationship between dynamiclongitudinal displacement of conveyance and ropes at lowerends can be given as
1198923 = 120593119888 + 2119889 (11990622119899+1 minus 119906119888) = 0 (23)
Shock and Vibration 5D
ispla
cem
entl(t)
(m)
0
300
600
900
1200
1500
20 40 60 80 1000Time t (s)
(a)
0
2
4
6
8
10
12
14
16
18
Velo
city
(t)
(ms
)
20 40 60 80 1000Time t (s)
(b)
minus10
minus05
00
05
10
20 40 60 80 1000Time t (s)
Acce
lera
tiona(t)
(ms
2)
(c)
Figure 4 Prescribed movement profiles
For the convenient of dealing with the constraint condi-tion the sequence of elements in Q is transformed and theexpression of G0 can be expressed as
G014(2119899)+2 = G024(2119899)+2 = minus1G034(2119899)+3 = minusG034(2119899)+4 = 2119889
(24)
The process of transforming DAEs to ODEs and obtain-ing the solution is the same as above and it could be solvedby Newmark-120573method
3 Results and Analysis
31 Parameters In mine hoisting system travelling distanceranges is large and continuously being increased For exam-ple in the South African gold mining industry the depth ofKloof Gold Mine shaft is 2085m and the hoisting distanceof South Deep Gold Mine has reached 3000m Now inChina new mines with shaft depths in the region of 1000ndash2000m based on parallel hoisting system have recently beenconsidered for examplemine shafts inChihong and Linyi Inthis section two-rope parallel hoisting system is discussedThe initial and maximum lengths of ropes are reset as 30mand 1566m respectively The downward movement profilesare shown in Figure 4
6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5D
ispla
cem
entl(t)
(m)
0
300
600
900
1200
1500
20 40 60 80 1000Time t (s)
(a)
0
2
4
6
8
10
12
14
16
18
Velo
city
(t)
(ms
)
20 40 60 80 1000Time t (s)
(b)
minus10
minus05
00
05
10
20 40 60 80 1000Time t (s)
Acce
lera
tiona(t)
(ms
2)
(c)
Figure 4 Prescribed movement profiles
For the convenient of dealing with the constraint condi-tion the sequence of elements in Q is transformed and theexpression of G0 can be expressed as
G014(2119899)+2 = G024(2119899)+2 = minus1G034(2119899)+3 = minusG034(2119899)+4 = 2119889
(24)
The process of transforming DAEs to ODEs and obtain-ing the solution is the same as above and it could be solvedby Newmark-120573method
3 Results and Analysis
31 Parameters In mine hoisting system travelling distanceranges is large and continuously being increased For exam-ple in the South African gold mining industry the depth ofKloof Gold Mine shaft is 2085m and the hoisting distanceof South Deep Gold Mine has reached 3000m Now inChina new mines with shaft depths in the region of 1000ndash2000m based on parallel hoisting system have recently beenconsidered for examplemine shafts inChihong and Linyi Inthis section two-rope parallel hoisting system is discussedThe initial and maximum lengths of ropes are reset as 30mand 1566m respectively The downward movement profilesare shown in Figure 4
6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
Table 1 System parameters used in calculation
Parameter Value120588 115 kgmJ 4518 times 10minus3 kgsdotm21198761198861 1198761198862 1746 times 108N1198761198892 1198761198892 1227 times 104Nsdotm2minus1198761198871 1198761198872 8539 times 105 Nsdotmminus1198761198881 1198761198882 7969 times 105 Nsdotm120577119906 120577120579 13 times 10minus4119889 035m119898119888 20 t119869119888119909 8313 times 103 kgsdotm2119869119888119911 1155 times 104 kgsdotm2119896119888 8 times 105Nm119888119888 67 times 104 Nsm1199031 11m1199032 08mR 25m
Following the regulations that are mentioned above forparameter symbols system parameters used in calculationare listed in Table 1 in which 119877 is the radius of drum
The longitudinal drive deviation 119890119894(119905) on 119894th rope could bedenoted as
119890119894 (119905) = 119890119904119894 (119905) + 119890119903119894 (119905) 119894 = 1 2 (25)
where 1198901199041(119905) = 119890119878 sin(1198991 sdot (119897(119905) minus 1198970)119877) and 1198901199042(119905) = 119890119878 sin(1198992 sdot(119897(119905)minus1198970)119877+120572) denote swing amplitude of noncircular drumrespectively The 119890119878 and 120572 are expressed as 119890119878 = 120581 sdot 119877 and120572 = 120589 sdot 120587 in which 120581 and 120589 are scale coefficients in this paper120581 = 0001 and 120589 = 0 The coefficients 1198991 and 1198992 denote degreeof defect distribution respectively in this paper 1198991 = 1 and1198992 = 2 1198901199031(119905) = 0 and 1198901199032(119905) = (119890119903119877)(119897(119905) minus 1198970) denote relativedeviation induced by radiusrsquo error of drum respectively The119890119903 is expressed as 119890119903 = 120585 sdot 119877 in which 120585 is a scale coefficient
32 Dynamic Response under Drive Deviation The dynamicresponses of the hoisting system are affected by many factorsbut the influence of the radiusrsquo error of the hoisting rope 119890119903is more important because it brings large tension differenceIn this paper the following parametric study will concentrateon the influence of the radiusrsquo error of the hoisting rope 119890119903and the dynamic responses are investigated In addition thevariable-domain finite element number 119899 = 5 is used forthe convergence of the solution and the results are shown inFigures 5sim8
As shown in Figures 5sim7 the tension and torsion of bothropes fluctuate greatly at the beginning because of hoistingacceleration and the fluctuation decreases with the hoistingvelocity at constant speed but resonances occur while thenatural frequency is close to the excitation frequency whichis shown in Figure 8 It is obvious that the longitudinal andtorsional frequencies about hoisting ropes system decrease asthe length increases but the rotational frequencies about con-veyance keep almost unchanged Intersection points between
Rope 1Rope 2
30
60
90
120
150
180
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
20 40 60 80 100 1200Time (s)
minus20
-10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
minus10
minus05
00
05
10
Tors
iona
l acc
eler
atio
n (r
ads
2)
(c)
Figure 5 (a) Tensions (b) torsions of the end ropes and (c)accelerations of conveyance calculated using 120585 = 00005
the natural frequencies and the excitation frequencies denotethe resonance locations It should be noted that there are
Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
Rope 1Rope 2
0
30
60
90
120
150
180
210
Tens
ion
of ro
pes (
kN)
20 40 60 80 100 1200Time (s)
(a)
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
000
025
050
075
100
125
150
(b)
LongitudinalHorizontal torsionVertical torsion
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 6 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 0001
multiple resonance locations during time interval 60sim90 swhich validate the results of Figures 5sim7 Although the tor-sion of ropes has approximately the same trend of vibrationwith tension in the beginning there is some difference thatthe torsions of two ropes increase even if the tension of onerope drops gradually or the rope is slack The reason forthis phenomenon is that the weight of rope along varyinglength goes up and the tension of upper ends of rope risesgradually therefore the torsions of the two ropes move upwhich also can be explained by (5) and (7) The accelerationsof conveyance change violently in the horizontal directionduring one rope alternating between the slack and tight states
The dynamic tension difference between the ropes withthe coefficient 120585 = 00015 (Figure 7) is changed more thanthat with the coefficient 120585 = 0001 (Figure 6) and 120585 = 00005(Figure 5) which indicates that the deviation between ropescaused by the winding radiusrsquo error of drum can bring largeinfluence to the tension difference It is obvious that even ifthe deviation was only 11000 of the radius the tension ofone rope would dramatically drop even close to zero which
means that there is an obvious tension imbalance betweentwo ropes It is worth noting that intermittent tension of oneropewould happen and last for a long time which is shown inFigure 6(a) if the deviation (for example 11000 of the radius)was inappropriate It should be emphasized that unreasonablediscordance between ropes would bring tension imbalanceand should be controlled during the design and manufactureof drum especially in super deep parallel hoisting system
4 Conclusions
This paper addresses the modeling of parallel hoisting sys-tem considering the drive deviation and the Vd-FEM andLagrangersquos equations of the first kind are used to derivethe equations of motion of the system The dynamic modelusing Vd-FEM proposed for parallel hoisting system canbe readily utilized to solve several challenging problemsincluding the slack or tight condition of ropes the tensionsand torsions between conveyance and ropes and the rotationof the conveyance
8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
Rope 1Rope 2
20 40 60 80 100 1200Time (s)
0
30
60
90
120
150
180
210
240Te
nsio
n of
rope
s (kN
)
(a)
000
025
050
075
100
125
150
Rope 1Rope 2
Tors
ions
of e
nd ro
pes (
kNmiddotm
)
20 40 60 80 100 1200Time (s)
(b)
LongitudinalHorizontal torsionVertical torsion
minus15minus12minus09minus06minus03000306091215
Tors
iona
l acc
eler
atio
n (times
10minus1
rad
s2)
minus20
minus10
0
10
20
Long
itudi
nal a
ccel
erat
ion
(times10
minus1
ms
2)
20 40 60 80 100 1200Time (s)
(c)
Figure 7 (a) Tensions (b) torsions of the end ropes and (c) accelerations of conveyance calculated using 120585 = 00015
Freq
uenc
y (H
z)
Time (s)10 20 30 40 50 60 70 80 90 100 110
Excitation frequency 1
Excitation frequency 2
051
152
253
354
455
55
Figure 8 Longitudinal torsional and excitation frequencies
It should be noted that the torsions of two ropes increaseeven if the tension of one rope drops gradually or the rope isslackThe drive deviation (only 11000 of the radius) between
ropes caused by the winding radiusrsquo error of drum will bringlarge influence to the tension difference and even lead to slackrope And unreasonable discordance between ropes shouldbe controlled for the design and manufacturing of drum onsuper deep parallel hoisting system
Appendix
The matrix of element mass damping stiffness and force islisted as follows
m119894119895 = 120588A1c119894119895 = 120588 (2A3 + 2VA1198792 minus VA2) + 120577119906119876119886119894 A1198792 + 120581120588VA11k119906119894119895
= 120588 (A6 + 2VA7 + 119886A1198792 + V2A14 minus V2A4 minus VA5)+ 119876119886119894 A4 + 120577119906119876119886119894 A7 + 120581 (120588VA12 + 120588V2A13)
Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
c119906119894120579119894119895 = 120577119906119876119887119894A1198792 k119906119894120579119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577119906119876119887119894A7f119906119894119895
= 120588V2A9 + 120588 (119892 minus 119886)A8 minus (120588119892119897 + 119898119888119892119896 )A9+ 120588119892A15 minus 120581120588V2A10
m120579119894119895 = 119869A1c120579119894119895 = 119869 (2A3 + 2VA1198792 minus VA2) + 120577120579119876119889119894 A1198792 + 120581119869VA11k120579119894119895
= 119869 (A6 + 2VA7 + 119886A1198792 + V2A20 minus V2A4 minus VA5)+ 119876119889119894 A4 + 120577120579119876119889119894 A7 + 120581 (119869VA12 + 119869V2A13)
c120579119894119906119894119895 = 120577120579119876119888119894A1198792 k120579119894119906119894119895 = 05 (119876119887119894 + 119876119888119894 )A4 + 120577120579119876119888119894A7f120579119894119895 = [minus (119898119888119896 + 120588119897) 119892A9 + 120588119892A15] 119876
119888119894119876119886119894
(A1)
where
120581 = 1 119895 = 1198990 others (A2)
The matrixes of coefficients are as follows
A1 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895d119909
A2 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895d119909
A3 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905d119909
A4 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119909d119909
A5 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909N119895119905d119909
A6 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119905d119909
A7 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895N119895119905119909d119909
A8 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895 d119909
A9 = int119895119897(119905)119899(119895minus1)119897(119905)119899
N119879119895119909d119909A10 = N119879119899
10038161003816100381610038161003816119909=119897(119905) A11 = N119879119899N119899
10038161003816100381610038161003816119909=119897(119905) A12 = N119879119899N119899119905
10038161003816100381610038161003816119909=119897(119905) A13 = N119879119899N119899119909
10038161003816100381610038161003816119909=119897(119905) A14 = int119895119897(119905)119899
(119895minus1)119897(119905)119899N119879119895N119895119909119909d119909
A15 = int119895119897(119905)119899(119895minus1)119897(119905)119899
119909N119879119895119909d119909(A3)
where the derivatives of shape function about t and x aregiven as
N119895119909 = [411989921199091198972 minus 119899 (4119895 minus 1)1198974119899 (2119895 minus 1)
119897 minus 811989921199091198972411989921199091198972 minus 119899 (4119895 minus 3)119897 ]
N119895119909119909 = 41198992
1198972 [1 minus2 1] N119895119905 = V119899119909
1198973 [(4119895 minus 1) 119897 minus 4119899119909 8119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 4119899119909] N119895119909119905 = 119899V1198973 [(4119895 minus 1) 119897 minus 8119899119909 16119899119909 minus 4 (2119895 minus 1) 119897 (4119895 minus 3) 119897 minus 8119899119909]
N119895119905119905 = 1198991199091198974[[[[
minus1198972119886 + 2119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 41198971198861198991199094 (1198972119886 minus 2119897V2 minus 21198972119886119895 + 4119897119895V2 minus 6119899V2119909 + 2119897119886119899119909)(minus31198972119886 + 6119897V2 + 41198972119886119895 minus 8119897119895V2 + 12119899V2119909 minus 4119897119886119899119909)
]]]]
T
(A4)
10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and Vibration
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported by the National Key Basic ResearchProgram of China (2014CB049401) the National NaturalScience Foundation of China (51475456) the FundamentalResearch Funds for the Central Universities (2014YC06)and the Priority Academic Program Development of JiangsuHigher Education Institutions (PAPD)
References
[1] J Du H Bao C Cui and D Yang ldquoDynamic analysis of cable-driven parallel manipulators with time-varying cable lengthsrdquoFinite Elements in Analysis and Design vol 48 no 1 pp 1392ndash1399 2012
[2] W D Zhu and J Ni ldquoEnergetics and stability of translatingmedia with an arbitrarily varying lengthrdquo Journal of Vibrationand Acoustics Transactions of the ASME vol 122 no 3 pp 295ndash304 2000
[3] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathematicalmodelrdquo Journal of Sound and Vibration vol 262 no 2 pp 219ndash244 2003
[4] J Wang G Cao Z Zhu Y Wang and W Peng ldquoLateralresponse of cable-guided hoisting system with time-varyinglength theoretical model and dynamics simulation verifica-tionrdquo Proceedings of the Institution of Mechanical Engineers PartC Journal ofMechanical Engineering Science vol 229 no 16 pp2908ndash2920 2015
[5] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructuremethodwith application tomoving elevator cable-car systemsmdashpart I methodologyrdquo Journal of Vibration andAcoustics Transactions of the ASME vol 135 no 5 10 pages2013
[6] S Kawamura H Kino and CWon ldquoHigh-speed manipulationby using parallel wire-driven robotsrdquo Robotica vol 18 no 1 pp13ndash21 2000
[7] E Ottaviano ldquoAnalysis and design of a four-cable-drivenparallel manipulator for planar and spatial tasksrdquo Proceedingsof the Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 222 no 8 pp 1583ndash15922008
[8] B Y Duan Y Y Qiu F S Zhang and B Zi ldquoOn design andexperiment of the feed cable-suspended structure for superantennardquoMechatronics vol 19 no 4 pp 503ndash509 2009
[9] M H Korayem and M Bamdad ldquoDynamic load-carryingcapacity of cable-suspended parallel manipulatorsrdquo The Inter-national Journal of AdvancedManufacturing Technology vol 44no 7-8 pp 829ndash840 2009
[10] X-G Shao Z-C Zhu Q-G Wang P C Chen B Zi andG-H Cao ldquoNon-smooth dynamical analysis and experimen-tal validation of the cable-suspended parallel manipulatorrdquoProceedings of the Institution of Mechanical Engineers Part CJournal of Mechanical Engineering Science vol 226 no 10 pp2456ndash2466 2012
[11] Y Wang G Cao Z Zhu J Wang and N Wang ldquo1483Longitudinal response of parallel hoisting system with time-varying rope lengthrdquo Journal of Vibroengineering vol 16 no 8pp 4088ndash4101 2014
[12] O C Zienkiewicz and R L Taylor The Finite Element Methodfor Solid and Structural Mechanics Butterworth-Heinemann2005
[13] L Meirovitch Principles and Techniques of Vibrations PrenticeHall Upper Saddle River NJ USA 1997
[14] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxially moving beam part I time integrationrdquo Journal of Soundand Vibration vol 178 no 4 pp 433ndash453 1994
[15] M Stylianou and B Tabarrok ldquoFinite element analysis of anaxiallymoving beam part II stability analysisrdquo Journal of Soundand Vibration vol 178 no 4 pp 455ndash481 1994
[16] P-H Wang R-F Fung and M-J Lee ldquoFinite element analysisof a three-dimensional underwater cable with time-dependentlengthrdquo Journal of Sound and Vibration vol 209 no 2 pp 223ndash249 1998
[17] K A F Moustafa E H Gad A M A El-Moneer and M I SIsmail ldquoModelling and control of overhead cranes with flexiblevariable-length cable by finite element methodrdquo Transactions ofthe Institute of Measurement and Control vol 27 no 1 pp 1ndash202005
[18] GA CostelloTheory ofWire Rope Springer ScienceampBusinessMedia Berlin Germany 1997
[19] J M Hamilton ldquoVibration-based techniques for measuring theelastic properties of ropes and the added mass of submergedobjectsrdquo Journal of Atmospheric and Oceanic Technology vol 17no 5 pp 688ndash697 2000
[20] S K Soltakhanov M P Yushkov and S A ZegzhdaMechanicsof Non-Holonomic Systems A New Class of Control SystemsFoundations of Engineering Mechanics Springer Science ampBusiness Media Berlin Germany 2009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of