Embed Size (px)
Citation preview

Dynamic quadrature booster as an aid to system
Y.J. Fang D.C. Macdonald
Indexing terms: Quadrature boosters, Power pow, System stability
Abstract: Quadrature boosters (QB) have been widely used to control the power flow distribution between parallel transmission lines. The advent of very fast thyristo dvacuum switch tap changers makes the dynamic quadrature booster a powerful FACTS device for the improvement of the transient and dynamic stability of power systems. The basic; concepts of the dynamic QB operation, the modelling aspects of a multimachine power system in which dynamic QB are situated, the ideal control strategy and practical considerations are presented. Simulations show that in a small, simple, power system the QB can substantially suppress disturbances befoi-e swings in load angle have become large. In a large interconnected system the action is less successful.
1 Introduction
A quadrature booster (QB) is a series-connected device that directly modulates the transmitted power across a line in a power system. Normally a QB takes a voltage proportional to and in phase with the voltage between two lines of a three-phase system and inserts it in the third phase, so as to change the phase difference in voltage between the ends of the line in which the QB is situated, as shown in Fig. 1. If the line is one of a number of tie lines lihat are effectively in parallel the power flow in the line containing the QB is increased (or decreased), the remaining parallel lines carrying the balance. Quadrature boosters have been widely used in this context where one of a group of lines in parallel had a lower reactance than the others and tended to reach its thermal lim It before the remainder.
Traditionally, the quadrature voltage injection has been controlled by slow acting mechanical tap-changers and the QB is incapable of dynamic action. The pros- pect of very fast thyristor/vacuum switch tap changers [l] lifts the QB from a static to a dynamic role and util-
0 IEE, 1998 IEE Proceedings online no. 19981623 Paper first received 16th Ciecember 1996 and in revised form 21st July 1997 The authors were both with the Department of Electrical & Electronic Engineering, Jinperial College of Science, Technology & Medicine, Exhi- bition Road, London, SW7 2BT, United Kingdom Y.J. Fang is now with the Nanjing Automation Research Institute, Peo- ple's Republic of China
ities who have installed a QB for load redistribution reasons could obtain a dynamic controller merely by changing the mechanical tap changer for a fast acting equivalent.
. . . _
Fig. 1 One phase of a QB inserting ap .u . voltage in each phase
P + j Q Itja A'
I ' V ' " I V
Fig.2 One machine - infinite busbar system with a QB in between
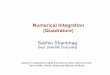
The principle of QB control action can be seen by examining the electrical output power P of a generator fed from an infinite busbar through a line of reactance X with a QB in series with X, as shown in Fig. 2. The power-angle characteristic can be written as eqn. 1, where V and E are the system and machine internal voltages, respectively, a is the quadrature voltage injec- tion in per unit, 6 is the machine rotor angle, X is the equivalent reactance joining V and E, and y = tan-' a is the phase shift angle introduced by the QB.
EV EV X X
P = - sin6 - -acosS
= EV X -d-- 1 + a2 sin(6 - y) (1)
If 6, the load angle of the generator with respect to V, the system voltage, stays constant it can be seen from eqn. 1 that the power in the line is a function of a. With an isolated generator the power level will in the longer term be set by the generator governor setting, the machine rotor assuming a new value of 6. How- ever, in the short term the booster control can be exer- cised to increase or reduce the power and provide a damping action.
For small signal analysis, the generator shaft dynam- ics can be written as in eqn. 2 while the generator out- put power given by eqn. 1 can be linearised to give eqn. 3, where Pm is the per-unit mechanical input power, H the inertia constant in seconds, %, the rated speed in radians per second, and D the natural damp-
41 IEE Proc-Gener. Transm. Distrib., Vol. 145, No. I , January 1998

ing coefficient.
dA6 EV - - cos So AS
2H d2AS WO dt dt X ___ - - D - -
EV X
+ - cosSoAa
( 3 )
An additional damping term can be obtained if the control law is chosen as Act = -K(dAGIdt), the voltage injection being made proportional to the rate of change of the rotor angle, commonly referred to as the machine speed.
It can also be seen from eqn. 1 that the phase shift- ing action of the dynamic QB results in a horizontal shift of the power-angle characteristic in the P-6 plane, as shown in Fig. 3. If there is a three-phase fault at the generator busbar at 6 = 6, and the fault is cleared at 6 = 6, as shown in Fig. 3a, the QB can be controlled to shift the P-6 curve to the left so that the generator out- put power is boosted to give its maximum possible sta- bilising ability and the first swing angle can be significantly reduced.
P
I I pc
t
Fig.3 P-6cuvve as shfted by the dynamic QB
It is unlikely that very large voltagelphase changes will be economic and the limit to the inserted voltage is likely to be of the order of 10-20% at the most. The dynamic QB would be effective when 6 is in the range of 30-50" which is in the vicinity of the operating point of many heavily loaded lines.
However, when 6, is high or the fault clearance angle 6, is large, as shown in Fig. 3b, the generator could move to the region where the electric power has a neg- ative derivative with respect to the power angle 6 and the dynamic QB with its limited voltage injection value would lose its effectiveness at improving system stabil-
42
ity. In [2], a solid-state, high speed, 360" phase shifter is envisaged to extend the time the electric power can offer its maximum possible stabilising ability by contin- uously shifting the P-6 curve after the electric power has reached its maximum value as shown in Fig. 3b.
Previous authors have envisaged the use of dynamic quadrature boosters for postfault conditions and for damping subsynchronous modes [3-81. Usually either continuous switching of thyristors or continuous con- trol of equally spaced taps have to be implemented in the dynamic QB controllers to achieve the desired over- all system performance. The resulting power electronics circuits are complicated.
This paper shows how the action of a dynamic quad- rature booster might be controlled to enhance system stability in a multimachine power system. A nonlinear design for a QB controller, using fuzzy sliding mode control, is proposed. It is shown that with generator rotor speed or area frequency as the input, continuous switching is not required and the QB output can be designed to give only three values of quadrature volt- age injection: maximum in both directions, and zero. Simulation of a small power system shows that both dynamic and transient stability can be greatly enhanced.
In a closely connected power system the QB cannot always be situated close to a particular generator, sys- tem areas may not be clearly defined and the rotor speedlsubsystem frequency signal is not a feasible con- trol input. A control strategy using line power as a con- trol input is developed. Simulation results of an NGC equivalent system show that a continuous QB control action can significantly improve system damping.
2 Mathematical modelling
An initial formulation was made including network transient terms. These terms are usually omitted in sta- bility calculations because of the complexity of model- ling and the high computational cost. In the steady state the QB is essentially performing in a way similar to a series capacitor, and a check was made to confirm that subsynchronous resonance does not occur. Also the use of an oversimplified model for a machine close to a fault [9] is likely to result in an incorrect calcula- tion of the generator speed, which is essential for the study of dynamic QB control.
Each generator is represented by a two-axis synchro- nous machine [9] in the form of a voltage source behind the stator resistance and machine subtransient reactance. This can be directly coupled with the net- work equations which are systematically formed by the use of general circuit theory [9]. This method has the advantage that the state equations required for step-by- step calculation are obtained directly. During a digital simulation a new value of machine voltage is calculated at each time step which represents the effect of chang- ing field current and the rotor and stator transients. When torsional modes are of interest a multi-inertia model of the generator shaft dynamics can be used.
Two time-constant models are used to represent the generator voltage regulators and governors as shown in Figs. 4 and 5 .
The characteristics of the QB can be written in phasor quantities as
V' = V(1 + j a ) 1 = I'(1 - p!) (4)
IEE Proc -Gener Transm Distrib , VoI 145, No 1, January 1998

V, I and V , I‘ being the voltage and current on each side of the QB. For balanced conditions, the two-axis form of eqn. 4 is
vi = v d avq vi = vq - aVd I d = I; - aI’ 4 I , = I; + all, ( 5 )
as shown in Fig. 6. The last two terms in eqn. 5 are treated as constant voltage and current sources which are updated at each time step.
=~ u(k) phase shifter - transients
I Vt Fig.4 Voltage regulator
power system w - L (w, -tlS/dtl
Fig. 5 Speed governor
A W - w , - wz ”
relay with dead zone fuzzy switching surface
c
_- . - a vq
-+- * Fig.6 QB representation in d-q axes U ( A w , A w )
fuzzy
I u Fig.7 QB switching systwn
The switching control is modelled with a first-order model of a gain and a small time constant shown in Fig. 7, where Ur is the reference signal and U is the feedback control signal.
At each time instant, the whole network consists entirely of time-invariant RLC elements, voltage sources and current sources. Standard electric network theory [9] involving general topological considerations is used to systematically formulate the state equations. Generally speaking, currents flowing through genera- tors, lines and some loads, voltages across capacitors, and machine variables such as generator speed and load angle are selected as state variables. The nonlinear differential equations of the whole system can be expressed in a matrix form as
where U(t) is the feedback control signal to the switch- ing system of QBs and is to be decided by the control law used.
When generator and network transients are neglected, the differential equations involving generator and network currents and capacitor voltages become
IEE Proc -Gener Transm Distrib , Vol 145, No I , January 1998
algebraic and are solved with the remaining differential equations.
3 Fuzzy-sliding-mode control
The dynamic QB is essentially a device whose effect is nonlinear, a tap-change producing a discrete angle change. Representation as a linear device assumes suc- cessive tap-changes in response to a disturbance. This may be possible with a semiconductor tap-changer but it is appropriate to consider variable structure control (VSC) whose action is also of a discrete switching nature. Thus control is exercised by discrete changes in the tap settings of the QB, with three possible voltage injections: the maximum in each direction and zero. The system is ‘bang-bang’ in nature with a central dead zone, the strength of the injection being given by its duration as the maximum voltage is always used [lo].
The design of such a system requires a profound understanding of its behaviour and is essentially heuris- tic: informed commonsense. The stability of such a nonlinear system is theoretically determinable but each such system needs individual justification. No attempt is made to assure stability here, other than observing the behaviour of the power system containing the QB when it is disturbed.
Linear optimal control theory was initially used to control a QB in a small system and this showed that the action of the rate of change of frequency across a line was a particularly powerful control in restoring stability. In a two-machine system such a signal repre- sents the acceleration of one machine with respect to the other. Here the frequency difference (or speed) across the line containing the QB, Am@) is measured at successive instants (k = I , 2, 3 , ...). Division of succes- sive differences by the sampling time T gives the accel- eration
(7) Aw(k) - A w ( k - 1)
T P(W =
Control is derived from the relative speed AW(k) and the acceleration D(k) as shown in Fig. 8, the fuzzy switching surface being given in Figs. 9 and 10. In Fig. 9a the phase plane, with the acceleration P(k) scaled by Fa to emphasise its importance, is on the ver- tical axis and relative speed on the base. Any point Pkk) represents the acceleration and speed and can be expressed in radial components
R(k) = d ( w k ) ) 2 + (Qw4)2 (8)
A disturbed state ends when R(k) is zero.
(9)
43

- Y
U 0 LL
I
a
8 ( k ) b
Fig.9 FUZZY logic a Phase plane b Membership functions
0 d r
R(k) Fig. 10 Fuzzy logic Membership functions
Control action is determined by the membership functions, Fig. 96 and Fig. 10. ,uR(k) is defined in Fig. 10 linearly increasing from 0 to 1 with increasing R(k) and then saturating. The fuzzy switching surface of Fig. 9b gives values to ,uN(k) and ,up@) in terms of qk) . Their significance is to indicate the direction of the action of the QB. For instance, when 8 is less than go", PLk) lies in the first quadrant of Fig. 9a and the ends of the power line have a relative speed which is increasing and p d k ) being greater than ,up(k) it is appropriate to increase the power flow in the line. This is expressed as the fuzzy switching surface
The control signal is given by
An artificial dead zone is also included to avoid exces- sive switching action. U,,, in eqn. 10 corresponds to
44
the limit of quadrature voltage injection, normally 20% at the most [ l l , 121.
A dynamic QB with this fuzzy sliding mode control switching gives maximum voltage injection at the beginning of the disturbance and no injection when the oscillation is well under control. In effect, this results in a nonlinear type of damping action and at the same time greatly simplifies the dynamic QB design.
4 OB control in a closely connected power system
The success of the dynamic QB in stability enhance- ment arises from its fast action with a delay that is small compared with the period of the oscillations it is suppressing. Naturally it is essential to have measure- ment signals that accurately represent the system dynamics and give the right QB action. The difference in generator rotor speedlarea frequency between two generators or areas linked by a transmission line con- taining the QB is a signal that results in an excellent control effect for both small disturbances and severe faults as will be shown in Section 5.1 with a three-node system, and the highly simplified QB design as described in Section 3.
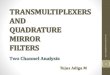
However, in a closely connected power system such an ideal signal does not exist because the subsystems are not clearly defined. A control input signal that is local to each QB is desirable. A natural choice is the power along the transmission line containing the QB. Phase compensation is then necessary. Two types of compensation are used in this paper and their transfer functions are shown in Fig. 11.
a Fig. 11 Phase compensation blocks a Type 1 b Type 2
b
When a fault occurs near the QB, the first swing sta- bility is not improved by the QB action using line power as a control input because the line power is zero during the fault. In this case, the QB action is inhibited during the fault period and improves the postfault sys- tem damping only when the fault has been cleared.
5 Numerical examples
5.7 Fuzzy sliding mode OB control in a simple power system A three machine test system is shown in Fig. 12. Each of the three lines has a QB able to provide kO.2p.u. phase shift voltage. The generator parameters are given in Table 1.
Time domain simulations are obtained first, for an increase of 10% in generator 1 bus bar load for 150ms (a small signal disturbance) and secondly, a lOOms three-phase fault at the same point. Simulations includ- ing all the transient terms and the distributed inertia of the generators showed that subsynchronous oscillations did not occur as they would have if controlled series capacitors had been used instead of dynamic QB. Sub- sequently, the generator was modelled as a single iner- tia and generator stator and network transients are neglected.
IEE Proc-Gener. Transm. Distrib., Vol 145, No I , January 1998

0.8011+
c TCQB3
0.2*j0.1
0.5 j 0.2
0.8-jO.25
Fig. 12 Three-machine te,rt system to a IOOMVA base
Table 1: Generator dalta: p.u. to machine rating
G I (2 and G3
130 MVA
0.00122
0.12
0.020
0.12
2.0
2.13
0.028
0.0603
1.8
1.93
4.0 0.00256
0.01
0.001
0.01
5.56
0.0875
0.05
0.22
'I 00 MVA
0.001
0.1
0.0212
0.125
'I .98
;!.09
0.027
0.0555
'I .97
'I .98
5.6825
0.00334 0.01
0.001
0.01
5.56
0.0796
0.1
0.3
Controller parameters are the same for both distur- bances with Fa = 0.01. For the three-machine test sys- tem, the response of the relative load angle between generators 1 and 3 when the three QBs are in or out of service is shown in Figs. 13 and 14. The switching con- trol signal for a fault is shown in Fig. 15.
From Fig. 13 it can be seen that the novel fuzzy slid- ing mode QB conwol can greatly enhance system damping so that thl: small signal oscillations can be almost completely eliminated. From Fig. 14 it is clear that when the system is subject to a severe fault, the QB action can change the transient stability almost beyond recognition. The control signal shown in Fig. 15 is a successive switching between f maximum quadrature voltage injection commands and lasts less than 1s. It is hoped. that other advantages related to variable structure control and fuzzy logic, such as
bances, can be carried over as well. The fuzzy sliding mode control strategy is suitable
for either a one-machine-infinite-bus system where the
insensitivity to parameter variations or external distur-
IEE Proc.-Gener. Transm. Dhtrib., Vol. 145, No. I , January 1998
generator rotor speed can be easily obtained, or a sys- tem where the subsystems are clearly defined so that the area frequency signals are available as control input signals.
-6.8r
-8.Ll I I I I
0 1 2 3 L time,s
Fig. 13 ESfect offuzzy sliding mode QB control Three machine system subject to a temporary increase in GI load -x- no QB control _______ fuzzy relay control
- 2 r
0 1 2 3 L time,s
Fig. 14 ESfect of fuzzy sliding mode QB control Three-machine system subject to a lOOms three-phase fault at G1 bus -x.- no QB control ~ fuzzy relay control
0 1 2 3 L
Fig. 15 ESfect of fuzzy sliding mode QB control Three-machine system subject to a lOOms three-phase fault at G1 bus _______ fuzzy relay control
time,s
Table 2: Quadrature booster data
TCQBI OB2 OB3
K 0.2 0.3 0.3 r, 0.1 0.1 0.1
4s

5.2 Continuous QB control in a closely connected power system A reduced model of the NGC system is shown in Fig. 16. All the transmission lines containing QB are real lines. 463-7, situated along three major power transfer corridors give dynamic control action, each taking the corresponding line power as control input. Compensation of type 1 is used for QB3-5 and that of type 2 is used for QB6 and QB7. Gains and time con- stants were obtained by trial and error. For QB3, K1 = 4.0, T1 = 0.1, 12 = 0.5. For QB4 and QB5, K1 = 8.0, TI = 0.1, 72 = 0.5. For QB6 and QB7, T3 = 0.175, T4 = 2.0.
QBI
39 L1
Fig. 16 NGC equivalent system
Simulation is made for a looins three-phase fault at node 3. All QB action is inhibited during the fault period so that the first swing stability is not affected by the QB.
Generator G4 is a very large equivalent machine. The response in terms of the relative rotor angles between GI, G2, G3 and G4 when QB3-7 are in and out of service is shown in Figs. 17-19.
It can be seen that the postfault damping is signifi- cantly improved by the control action of the QB using the local line power as input.
46
-25 I J
0 1 2 3 L 5 time, s
Postfault dumping improvement in the NGC equivalent system Fig. 17 lOOms three-phase fault at node 3 -x- no QB control ~ QB3-7 in service
V, I I
0 1 2 3 L 5 -101
time, s Postfault dumping improvement in the NGC equivalent system Fig. 18
lOOms three-phase fault at node 3 -x- no QB control ~ QB3-7 in service
-25L I I I
0 1 2 3 L 5 time,s
Postfault damping improvement in the NGC equivalent system Fig. 19 lOOms three-phase fault at node 3 -x- no QB control ~ QB3-7 in service
6 Conclusions
The development of fast tap changers opens up the possibility of dynamic QBs being used to increase sys- tem damping to prevent interarea oscillations and improve system first swing stability. The fuzzy sliding mode control, assuming the direct measurement of speed/frequency of generatorshubsystems close to the QB makes it possible to use a QB design with the fewest number of taps (f maximum and zero) and therefore with a much simplified switching circuit. Sim- ulation results of a model system show that this novel nonlinear control results in excellent system perform-
IEE Proc -Gener Transm Distrib , Vol 145, No 1, January 1998

ance improvement for both small disturbances and severe fault cases. However, the control input signals can be obtained only in a one-machine-infinite-bus sys- tem or a system where subsystems are clearly defined.
In a closely connected power system, a control strat- egy that uses continuous QB control action is proposed in which a local line power is directly measured for control. Postfault damping can be greatly enhanced and therefore this control strategy can be used effec- tively for damping interarea oscillations. The best con- trol strategy for improving first-swing stability by use of transmission line power measurement remains to be found.
The dynamic QB should be particularly attractive where a static action is required for power flow redistri- bution in the steady state. Damping action is obtaina- ble for the difference in cost between a static and a dynamic tap changer.
7 Acknowledgments
The authors wish to thank Dr S. Geeves of the NGC Technical Audit Department for interest in and encour- agement of the work and for supplying the reduced model of the NGC system. Dr Fang wishes to thank the British Council and the State Education Commis- sion of China for their financial support and the NGC for a bursary.
~
8
1
2
3
4
5
6
7
8
9
References
‘Tapping into a quick switch idea’, Elecfr. Rev., 26th November- 9th December 1993, pp. 21 EDRIS, A.: ‘Enhancement of first-swing stability using a high speed phase shifter’, IEEE Trans., 1991, PWRsd, ( 3 ) , pp. 1113- 1118 BAKER, R., GUTH, G., EGLI, W., and EGLIN, P.: ‘Control algorithm for a static phase shifting transformer to enhance tran- sient and dynamic stability of large power systems’, ZEEE Trans.,
SHARAF, A.M., and DORAISWAMI, R.: ‘Stabilising an a s . link by using static phase shifters’, ZEEE Trans., 1983, F’WRS-
IRAVANI, M.R., and MATHUR, R.M.: ‘Two countermeasures for damping torsional interactions and transient torques of tur- bine generators’, IEEE Trans., 1987, PWRS-2, (2), pp. 406412 OKELLY, D., and MUSGRAVE, G.: ‘Improvement of power system transient stability by phase shift insertion’, Proc. IEE, 1973, 120, (2), pp. 247-252 ARNOLD, C.P., DUKE, R.M., and ARRILLAGA, J.: ‘Tran-
1982, PwRs--IOl, (9), pp. 3532-3541
102, (4), pp. 788-796
sient stability improvement using thyristor controlled quadrature voltage injection’, ZEEE Trans., 1981, P-lW, ( 3 ) , pp. 1382-1388 IRAVANI, M.R., DANDENO, P.L., NGUYEG, K.H., ZHU, D., and MARATUKULAM, D.: ‘Applications of static phase shifters in power systems’, IEEE Trans.,. 1994, PWI%9, (3) ,
JALEELI, N., VAAHEDI, E., and MACDONALD, D.C.: ‘Multi-machine system stability’. IEEE PICA conference, 1977,
pp. 1600-1608
Canada, pp. 51-58 10 DECARLO, RA., ZAK, S.H., and MATTHEWS, G.P.: ‘Varia-
ble structure of nonlinear multivariable svstems: a tutorial’. Proc. IEEE, 1988, 76, (3) , pp. 212-232
11 HIYAMA, T., and LIM, C.M.: ‘Application of fuzzy logic con- trol scheme for stability enhancement of a power system’. IFAC international symposium on Power systems and power plant con- trol, 1989, South Korea
12 FANG, Y.J.: ‘Dynamic and transient system control using fast acting quadrature boosters’. PhD thesis, University of London, June 1996
IEE ProcGener. Xransm. Distrib., Vol. 145, No. 1, January 1998 41