Embed Size (px)
Citation preview
sop
Dynamic Optimization
Dr. Abebe Geletu
Ilmenau University of TechnologyDepartment of Simulation and Optimal Processes
(SOP)
www.tu-ilmenau.de/simulationSeite 1

sop
Chapter 1: Introduction
www.tu-ilmenau.de/simulationSeite 2
"A system is a self-contained entity with interconnected elements, process and parts. A system can be the design of nature ora human invention."
A system is an aggregation of interactive elements.
• A system has a clearly defined boundary. Outside this boundary is the environment surrounding the system.• The interaction of the system with its environment is the most vital aspect. • A system responds, changes its behavior, etc. as a result of influences (impulses) from the environment.
1.1 What is a system?

sop Seite 3 www.tu-ilmenau.de/simulation
Course ContentChapters1. Introduction2. Mathematical Preliminaries3. Numerical Methods of Differential Equations4. Modern Methods of Nonlinear Constrained Optimization Problems5. Direct Methods for Dynamic Optimization Problems6. Introduction of Model Predictive Control (Optional)
References:

sop www.tu-ilmenau.de/simulationSeite 4
1.2. Some examples of systems
• Water reservoir and distribution network systems• Thermal energy generation and distribution systems • Solar and/or wind-energy generation and distribution systems• Transportation network systems• Communication network systems• Chemical processing systems• Mechanical systems• Electrical systems• Social Systems• Ecological and environmental system• Biological system• Financial system• Planning and budget management system• etc
sop Seite 5 www.tu-ilmenau.de/simulation
Space and Flight Industries
Dynamic Processes:• Start up• Landing• Trajectory control

sop Seite 6 www.tu-ilmenau.de/simulation
Chemical Industries Dynamic Processes:• Start-up• Chemical reactions• Change of Products • Feed variations• Shutdown

sop Seite 7 www.tu-ilmenau.de/simulation
Industrial Robot
Dynamische Processes:
• Positionining
• Transportation

sop www.tu-ilmenau.de/simulationSeite 8
1.3. Why System Analysis and Control?
• study how a system behaves under external influences• predict future behavior of a system and make necessary preparations• understand how the components of a system interact among each other• identify important aspects of a system – magnify some while subduing others, etc.
1.3.1 Purpose of systems analysis:

sop www.tu-ilmenau.de/simulationSeite 9
Strategies for Systems Analysis
• System analysis requires system modeling and simulation simulation
• A model is a representation or an idealization of a system.• Modeling usually considers some important aspects and processes of a system.• A model for a system can be:• a graphical or pictorial representation• a verbal description• a mathematical formulationindicating the interaction of components of the system
sop www.tu-ilmenau.de/simulationSeite 10
1.3.1A. Mathematical Models
• The mathematical model of a system usually leads to a system of equations describing the nature of the interaction of the system.
• The model equations can be: time independent steady-state model equations time dependent dynamic model equationsIn this course, we are mainly interested in dynamical systems.
• These equations are commonly known as governing laws or model equations of the system.
Sytems that we evolove with time are known as dynamic systems.

sop www.tu-ilmenau.de/simulationSeite 11
• Linear Differential Equations
• Example RLC circuit (Ohm‘s and Kirchhoff‘s Laws)
•
BuAxx
1.3.2. Examples of dynamic models
vuLBC
LLR
Av
iv
i
CC
,0
1 ,
01
1 ,x , x
vLv
i
C
LLR
v
i
CC
0
1
01
1

sop www.tu-ilmenau.de/simulationSeite 12
• Nonlinear Differential equations
)),(),(()( ttutxftx
1.3.2. Examples of dynamic models

sop www.tu-ilmenau.de/simulationSeite 13
• Nonlinear Differential equations
)),(),(()( ttutxftx
0)(15)(20
0105)(
220)(155
13233
2232
311
iiiiRi
iiiiR
Viii
1.3.2. Examples of dynamic models

sop www.tu-ilmenau.de/simulationSeite 14
1.3.1B Simulation
• studies the response of a system under various external influences – input scenarios
• for model validation and adjustment – may give hint for parameter estimation
• helps identify crucial and influential characterstics (parameters) of a system
• helps investigate: instability, chaotic, bifurcation behaviors in a systems dynamic as caused by certain external influences• helps identify parameters that need to be controlled
sop www.tu-ilmenau.de/simulationSeite 15
1.3.1B. Simulation ...
• In mathematical systems theory, simulation is done by solving the governing equations of the system for
various input scenarios.
This requires algorithms corresponding to the type of systems model equation.
Numerical methods for the solution of systems of equations and differential equations.
sop www.tu-ilmenau.de/simulationSeite 16
1.4 Optimization of Dynamic Systems
• A system with degrees of freedom can be always manuplated to display certain useful behavior.
• Manuplation possibility to control• Control variables are usually systems degrees of freedom.
We ask: What is the best control strategy that forces a system display required characterstics, output, follow a trajectory, etc?
Optimal ControlMethods of Numerical Optimization
sop Seite 17 www.tu-ilmenau.de/simulation
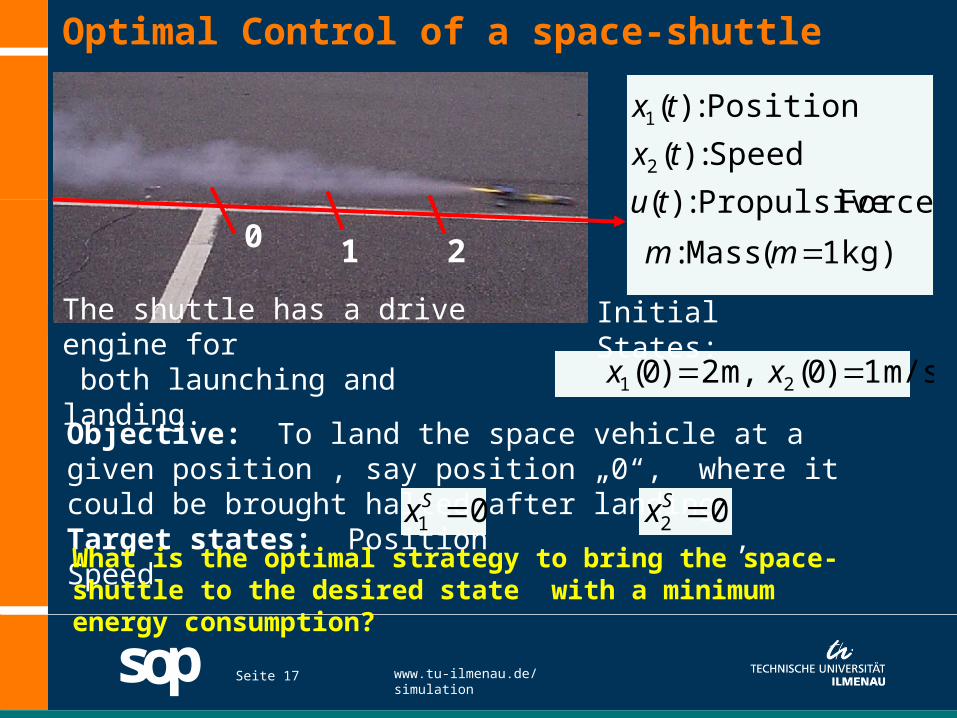
Optimal Control of a space-shuttle
0 1 2
Force Propulsive:)(
Speed:)(
Position:)(
2
1
tu
tx
tx
kg) 1( Mass: mm
Initial States:
m/s1)0( m,2)0( 21 xxThe shuttle has a drive engine for both launching and landing.
Objective: To land the space vehicle at a given position , say position „0“, where it could be brought halted after landing.Target states: Position , Speed01 Sx 02 SxWhat is the optimal strategy to bring the space-shuttle to the desired state with a minimum energy consumption?

sop Seite 18 www.tu-ilmenau.de/simulation
Optimal Control of a space-shuttle
0 1 2
Force Propulsive:)(
Speed:)(
Position:)(
2
1
tu
tx
tx
kg) 1( Mass: mm
Model Equations:
)()()(
)()(
2
21
txmtamtu
txtx
Then
)(1
)(
)()(
2
21
tum
tx
txtx
ux
x
x
x
1
0
00
10
2
1
2
1
Hence BuAxx Objectives of the optimal control:
• Minimization of the error: )();( 2211 txxtxx SS •Minimization of energy: )(tu
sop Seite 19 www.tu-ilmenau.de/simulation
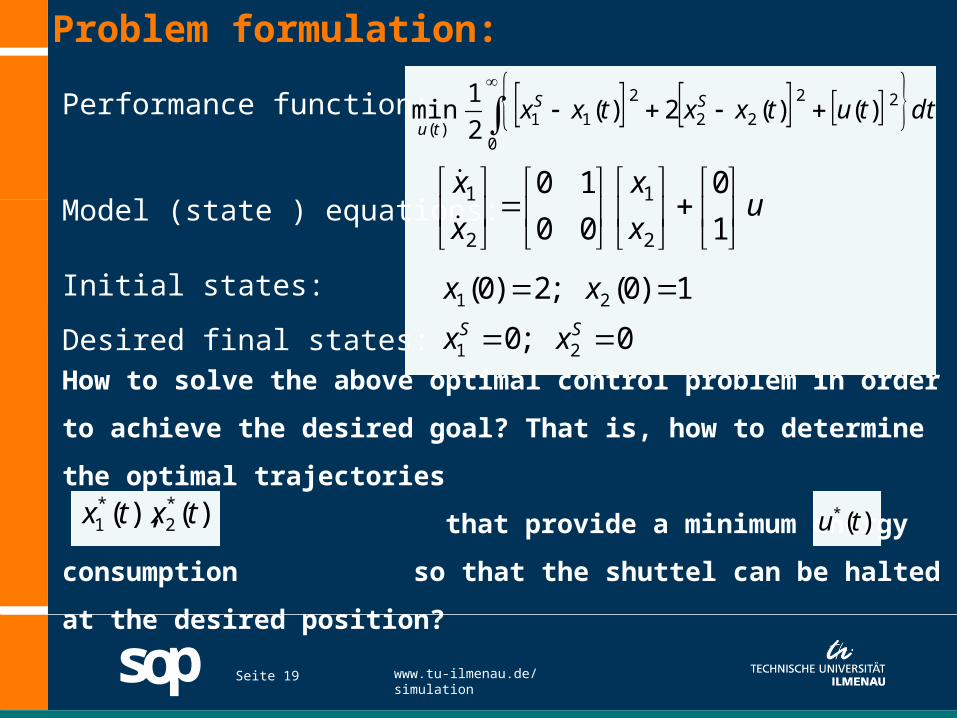
Problem formulation:
Performance function:
0
22
22
2
11)(
)()(2)(2
1min dttutxxtxx SS
tu
Model (state ) equations: ux
x
x
x
1
0
00
10
2
1
2
1
Initial states:
0;0
1)0(;2)0(
21
21
SS xx
xx
Desired final states:
How to solve the above optimal control problem in order to achieve
the desired goal? That is, how to determine the optimal trajectories
that provide a minimum energy consumption so
that the shuttel can be halted at the desired position?
)(),( *2
*1 txtx )(* tu

sop Seite 20 www.tu-ilmenau.de/simulation
Optimal Operation of a Batch Reactor

sop Seite 21 www.tu-ilmenau.de/simulation
Optimal Operation of a Batch Reactor
Some basic operations of a batch reactor
• feeding Ingredients
• adding chemical catalysts
• Raising temprature
• Reaction startups
• Reactor shutdown
TC
Tsoll
Chemical ractions: CBAorder1st order 2nd
Initial states: 0)0(,0)0(mol/l,1)0( CBA CCC
Objective: What is the optimal temperature strategy, during the operation of the reactor, in order to maximize the concentration of komponent B in the final product?
Allowed limits on the temperature: KTK 398298

sop Seite 22 www.tu-ilmenau.de/simulation
Mathematical Formulation: Objective of the optimization: )(max
)(fB
tTtC
BC
BAB
AA
CTkdt
dC
CTkCTkdt
dC
CTkdt
dC
)(
)()(
)(
2
22
1
21
RT
EkTk
RT
EkTk
2202
1101
exp)(
exp)(
KTK 398298
0)0(,0)0(mol/l,1)0( CBA CCC
ftt 0
Model equations:
Process constraints:
Initial states:
Time interval:
This is a nonlinear dynamic optimization problem.
sop www.tu-ilmenau.de/simulationSeite 23
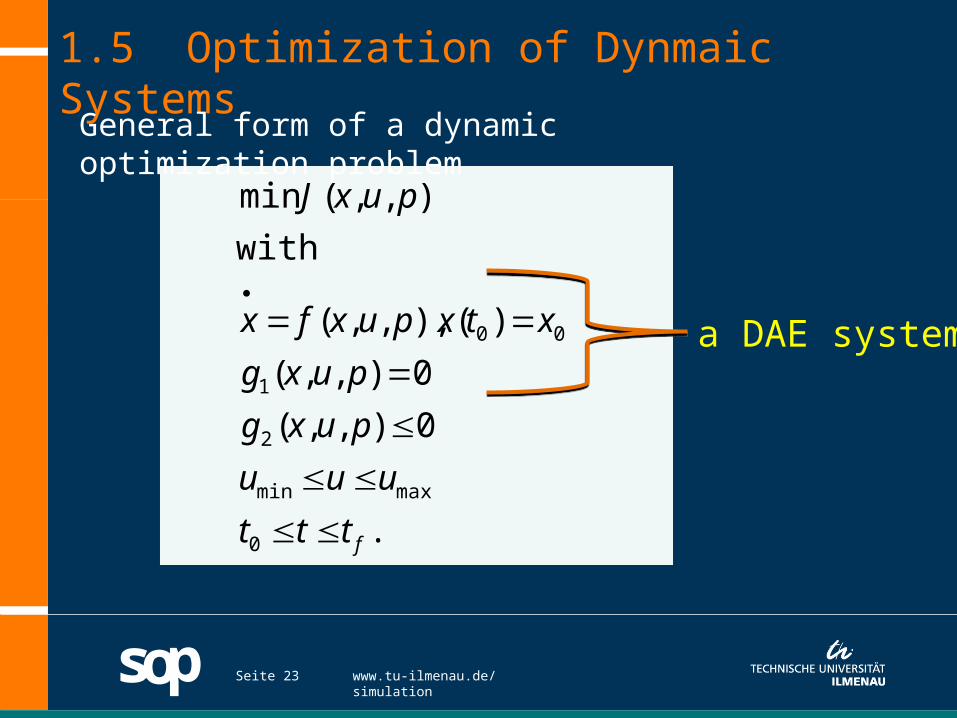
1.5 Optimization of Dynmaic Systems
.
0),,(
0),,(
)(),,,(
with
),,(min
0
maxmin
2
1
00
fttt
uuu
puxg
puxg
xtxpuxfx
puxJ
a DAE system
General form of a dynamic optimization problem
sop www.tu-ilmenau.de/simulationSeite 24
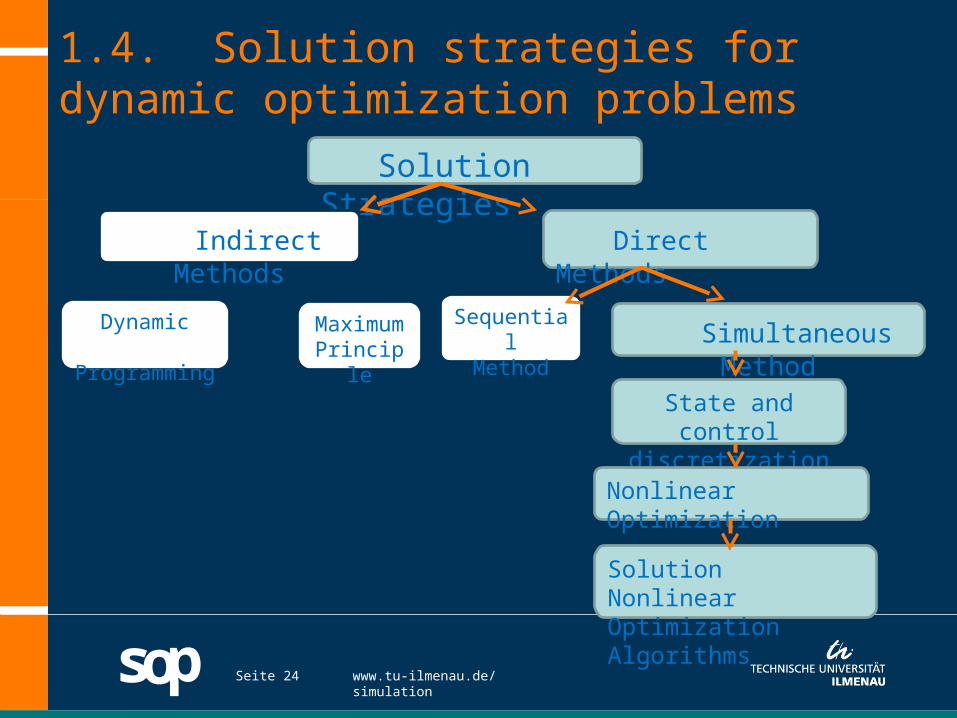
1.4. Solution strategies for dynamic optimization problems
Solution Strategies
Indirect Methods Direct Methods
Dynamic Programming
Maximum Principle
Simultaneous MethodSequential
Method
State and control discretization
Nonlinear Optimization
Solution Nonlinear Optimization Algorithms

sop Seite 25 www.tu-ilmenau.de/simulation
Solution strategies for dynamic optimization problems
Indirect methods (classical methods)
• Calculus of variations ( before the 1950‘s)
• Dynamic programming (Bellman, 1953)
• The Maximum-Principle (Pontryagin, 1956)1Lev Pontryagin
Direct (or collocation) Methods (since the 1980‘s)
• Discretization of the dynamic system
• Transformation of the problem into a nonlinear optimization problem
• Solution of the problem using optimization
algorithms Verfahren

sop www.tu-ilmenau.de/simulationSeite 26
Collocation Method
1.5. Nonlinear Optimization formulation of dynamic optimization problem
.
0),,(
0),,(
),,(min
maxmin uUu
pUXG
pUXF
with
pUXEU
• After appropriate renaming of variables we obtain a non-linear programming problem (NLP)