Embed Size (px)
Citation preview

Chapter 2
Dynamic Models
Problems and Solutions for Section 2.1
1. Write the differential equations for the mechanical systems shown in Fig. 2.38.
Solution:
The key is to draw the Free Body Diagram (FBD) in order to keep thesigns right. For (a), to identify the direction of the spring forces on theobject, let x2 = 0 and Þxed and increase x1 from 0. Then the k1 springwill be stretched producing its spring force to the left and the k2 springwill be compressed producing its spring force to the left also. You can usethe same technique on the damper forces and the other mass.
(a)
m1x1 = −k1x1 − b1 úx1 − k2 (x1 − x2)
m2x2 = −k2 (x2 − x1)− k3 (x2 − y)− b2 úx2
11

12 CHAPTER 2. DYNAMIC MODELS
Figure 2.38: Mechanical systems

13
m1x1 = −k1x1 − k2(x1 − x2)− b1 úx1
m2x2 = −k2(x2 − x1)− k3x2
m1x1 = −k1x1 − k2(x1 − x2)− b1( úx1 − úx2)
m2x2 = F − k2(x2 − x1)− b1( úx2 − úx1)
2. Write the equations of motion of a pendulum consisting of a thin, 2-kgstick of length l suspended from a pivot. How long should the rod be inorder for the period to be exactly 2 secs? (The inertia I of a thin stickabout an endpoint is 1
3ml2. Assume θ is small enough that sin θ ∼= θ.)
Solution:
Lets use Eq. (2.14)
M = Iα,

14 CHAPTER 2. DYNAMIC MODELS
mg
2lO
Moment about point O.
MO = −mg × l
2sin θ = IOθ
=1
3ml2θ
θ +3g
2lsin θ = 0
As we assumed θ is small,
θ +3g
2lθ = 0
The frequency only depends on the length of the rod
ω2 =3g
2l
T =2π
ω= 2π
s2l
3g= 2
l =3g
2π2= 1.49m
<Notes>

15
Figure 2.39: Double pendulum
(a) Compare the formula for the period, T = 2πq
2l3g with the well known
formula for the period of a point mass hanging with a string with
length l. T = 2πq
lg .
(b) Important!
In general, Eq. (2.14) is valid only when the reference point forthe moment and the moment of inertia is the mass center of thebody. However, we also can use the formular with a reference pointother than mass center when the point of reference is Þxed or notaccelerating, as was the case here for point O.
3. Write the equations of motion for the double-pendulum system shown inFig. 2.39. Assume the displacement angles of the pendulums are smallenough to ensure that the spring is always horizontal. The pendulumrods are taken to be massless, of length l, and the springs are attached3/4 of the way down.
Solution:

16 CHAPTER 2. DYNAMIC MODELS
1 2
k
1sin43
l 2sin43
l
m m
l43
If we write the moment equilibrium about the pivot point of the left pen-dulem from the free body diagram,
M = −mgl sin θ1 − k34l (sin θ1 − sin θ2) cos θ1
3
4l = ml2θ1
ml2θ1 +mgl sin θ1 +9
16kl2 cos θ1 (sin θ1 − sin θ2) = 0
Similary we can write the equation of motion for the right pendulem
−mgl sin θ2 + k3
4l (sin θ1 − sin θ2) cos θ2
3
4l = ml2θ2
As we assumed the angles are small, we can approximate using sin θ1 ≈θ1, sin θ2 ≈ θ2, cos θ1 ≈ 1, and cos θ2 ≈ 1. Finally the linearized equationsof motion becomes,
mlθ1 +mgθ1 +9
16kl (θ1 − θ2) = 0
mlθ2 +mgθ2 +9
16kl (θ2 − θ1) = 0
Or

17
θ1 +g
lθ1 +
9
16
k
m(θ1 − θ2) = 0
θ2 +g
lθ2 +
9
16
k
m(θ2 − θ1) = 0
4. Write the equations of motion for a body of mass M suspended from aÞxed point by a spring with a constant k. Carefully deÞne where thebodys displacement is zero.
Solution:
Some care needs to be taken when the spring is suspended vertically inthe presence of the gravity. We deÞne x = 0 to be when the spring isunstretched with no mass attached as in (a). The static situation in (b)results from a balance between the gravity force and the spring.
From the free body diagram in (b), the dynamic equation results
mx = −kx−mg.
We can manipulate the equation
mx = −k³x+
m
kg´,
so if we replace x using y = x+ mk g,
my = −kymy + ky = 0

18 CHAPTER 2. DYNAMIC MODELS
The equilibrium value of x including the effect of gravity is at x = −mk g
and y represents the motion of the mass about that equilibrium point.
An alternate solution method, which is applicable for any probleminvolving vertical spring motion, is to deÞne the motion to be with respectto the static equilibrium point of the springs including the effect of gravity,and then to proceed as if no gravity was present. In this problem, wewould deÞne y to be the motion with respect to the equilibrium point,then the FBD in (c) would result directly in
my = −ky.
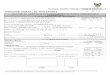
5. For the car suspension discussed in Example 2.2,
(a) write the equations of motion (Eqs. (2.10) and (2.11)) in state-variableform. Use the state vector x = [ x úx y úy ]T .
(b) Plot the position of the car and the wheel after the car hits a unitbump (i.e., r is a unit step) using MATLAB. Assume that m1 =10 kg, m2 = 350 kg, kw = 500, 000 N/m, ks = 10, 000 N/m. Findthe value of b that you would prefer if you were a passenger in thecar.
Solution:
(a) We can arrange the equations of motion to be used in the state-variable form
x = − ksm1x− b
m1úx+
ksm1y +
b
m1úy − kw
m1x+
kwm1r
= −µksm1
+kwm1
¶x− b
m1úx+
ksm1y +
b
m1úy +
kwm1r
y =ksm2x+
b
m2úx− ks
m2y − b
m2úy
So, for the given sate vector of x = [ x úx y úy ]T , the state-spaceform will be,
úxxúyy
=
0 1 0 0
−³ks
m1+ kw
m1
´− bm1
ks
m1
bm1
0 0 0 1ks
m2
bm2
− ks
m2− bm2
xúxyúy
+
0kw
m1
00
r(b) Note that b is not the damping ratio, but damping. We need to Þnd
the proper order of magnitude for b, which can be done by trial and

19
error. What passengers feel is the position of the car. Some generalrequirements for the smooth ride will be, slow response with smallovershoot and oscillation.
0 0.5 1 1.5 20
0.5
1
1.5Response with b = 1000.0
W heelCar
0 0.5 1 1.5 20
0.5
1
1.5Response with b = 2000.0
W heelCar
0 0.5 1 1.5 20
0.5
1
1.5Response with b = 3000.0
W heelCar
0 0.5 1 1.5 20
0.5
1
1.5Response with b = 4000.0
W heelCar
From the Þgures, b ≈ 3000 would be acceptable. There is too muchovershoot for lower values, and the system gets too fast (and harsh)for larger values.

20 CHAPTER 2. DYNAMIC MODELS
% Problem 2.5 bclear all, close all
m1 = 10;m2 = 350;kw = 500000;ks = 10000;B = [ 1000 2000 3000 4000 ];t = 0:0.01:2;
for i = 1:4b = B(i);F = [ 0 1 0 0; -( ks/m1 + kw/m1 ) -b/m1 ks/m1 b/m1;
0 0 0 1; ks/m2 b/m2 -ks/m2 -b/m2 ];G = [ 0; kw/m1; 0; 0 ];H = [ 1 0 0 0; 0 0 1 0 ];J = 0;
y = step( F, G, H, J, 1, t );
subplot(2,2,i);plot( t, y(:,1), :, t, y(:,2), - );legend(Wheel,Car);ttl = sprintf(Response with b = %4.1f ,b );title(ttl);
end
6. Automobile manufacturers are contemplating building active suspensionsystems. The simplest change is to make shock absorbers with a change-able damping, b(u1). It is also possible to make a device to be placed inparallel with the springs that has the ability to supply an equal force, u2,
in opposite directions on the wheel axle and the car body.
(a) Modify the equations of motion in Example 2.2 to include such con-trol inputs.
(b) Is the resulting system linear?
(c) Is it possible to use the forcer, u2, to completely replace the springsand shock absorber? Is this a good idea?
Solution:
(a) The FBD shows the addition of the variable force, u2, and shows bas in the FBD of Fig. 2.5, however, here b is a function of the controlvariable, u1. The forces below are drawn in the direction that wouldresult from a positive displacement of x.

21
m1x = b (u1) ( úy − úx) + ks (y − x)− kw (x− r)− u2
m2y = −ks (y − x)− b (u1) ( úy − úx) + u2
(b) The system is linear with respect to u2 because it is additive. Butb is not constant so the system is non-linear with respect to u1 be-cause the control essentially multiplies a state element. So if we addcontrollable damping, the system becomes non-linear.
(c) It is technically possible. However, it would take very high forcesand thus a lot of power and is therefore not done. It is a much bet-ter solution to modulate the damping coefficient by changing oriÞcesizes in the shock absorber and/or by changing the spring forces byincreasing or decreasing the pressure in air springs. These featuresare now available on some cars... where the driver chooses betweena soft or stiff ride.
7. Modify the equation of motion for the cruise control in Example 2.1,Eq(2.4), so that it has a control law; that is, let
u = K(vr − v) (124)
where
vr = reference speed (125)
K = constant. (126)
This is a proportional control law where the difference between vr andthe actual speed is used as a signal to speed the engine up or slow it down.Put the equations in the standard state-variable form with vr as the inputand v as the state. Assume that m = 1000 kg and b = 50 N · s /m, andÞnd the response for a unit step in vr using MATLAB. Using trial anderror, Þnd a value of K that you think would result in a control system inwhich the actual speed converges as quickly as possible to the referencespeed with no objectional behavior.
Solution:

22 CHAPTER 2. DYNAMIC MODELS
úv +b
mv =
1
mu
substitute in u = K (vr − v)
úv +b
mv =
1
mu =
K
m(vr − v)
A block diagram of the scheme is shown below where the car dynamicsare depicted by its transfer function from Eq. 2.7.
mbs
m
1K
u vrv
The state-variable form of the equations is,
úv = −µb
m+K
m
¶v +
K
mvr
y = v
so that the matrices for Matlab are
F = −µb
m+K
m
¶G =
K
mH = 1
J = 0
For K = 100, 500, 1000, 5000 We have,

23
Time (sec.)
Am
plitu
de
S tep Response
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1From: U(1)
To: Y
(1)
K=100
K=500
K=1000
K=5000
We can see that the larger the K is, the better the performance, with noobjectionable behaviour for any of the cases. The fact that increasing Kalso results in the need for higher acceleration is less obvious from theplot but it will limit how fast K can be in the real situation because theengine has only so much poop. Note also that the error with this schemegets quite large with the lower values of K. You will Þnd out how toeliminate this error in chapter 4 using integral control, which is containedin all cruise control systems in use today. For this problem, a reasonablecompromise between speed of response and steady state errors would beK = 1000, where it responds is 5 seconds and the steady state error is 5%.

24 CHAPTER 2. DYNAMIC MODELS
% Problem 2.7clear all, close all
% datam = 1000;b = 50;k = [ 100 500 1000 5000 ];
% Overlay the step responsehold onfor i=1:length(k)K=k(i);F = -(b+K)/m;G = K/m;H = 1;J = 0;step( F,G,H,J);
end
Problems and Solutions for Section 2.2
8. In many mechanical positioning systems there is ßexibility between onepart of the system and another. An example is shown in Figure 2.6where there is ßexibility of the solar panels. Figure 2.40 depicts such asituation, where a force u is applied to the mass M and another massm is connected to it. The coupling between the objects is often modeledby a spring constant k with a damping coefficient b, although the actualsituation is usually much more complicated than this.
(a) Write the equations of motion governing this system, identify appro-priate state variables, and express these equations in state-variableform.
(b) Find the transfer function between the control input, u, and theoutput, y.
Solution:
(a) The FBD for the system is

25
Figure 2.40: Schematic of a system with ßexibility
which results in the equations
mx = −k (x− y)− b ( úx− úy)
My = u+ k (x− y) + b ( úx− úy)
Let the state-space vector x = [ x úx y úy ]T
x = − kmx− b
múx+
k
my +
b
múy
y =k
Mx+
b
Múx− k
My − b
Múy +
1
Mu
So, úxxúyy
=
0 1 0 0− km − b
mkm
bm
0 0 0 1kM
bM − k
M − bM
xúxyúy
+0001M
u(b) We have the complete state-variable form from part a. We will learn
the systematic way to convert from the state-variable form to transferfunction later in chapter 7. If we make Laplace Transform of theequations of motion
s2X +k
mX +
b
msX − k
mY − b
msY = 0
− k
MX − b
MsX + s2Y +
k
MY +
b
MsY =
1
MU
In matrix form,·ms2 + bs+ k − (bs+ k)− (bs+ k) Ms2 + bs+ k
¸ ·XY
¸=
·0U
¸

26 CHAPTER 2. DYNAMIC MODELS
From Cramers Rule,
Y =
det
·ms2 + bs+ k 0− (bs+ k) U
¸det
·ms2 + bs+ k − (bs+ k)− (bs+ k) Ms2 + bs+ k
¸=
ms2 + bs+ k
(ms2 + bs+ k) (Ms2 + bs+ k)− (bs+ k)2U
Finally,
Y
U=
ms2 + bs+ k
(ms2 + bs+ k) (Ms2 + bs+ k)− (bs+ k)2
=ms2 + bs+ k
mMs4 + (m+M)bs3 + (M +m)ks2
9. For the inverted pendulum, Eqs. (2.34),
(a) Try to put the equations of motion into state-variable form using thestate vector x = [ θ úθ x úx ]T . Why is it not possible?
(b) Write the equations in the descriptor form
Ex = F0x+G0u,
and deÞne values for E, F0, and G0 (note that E is a 4× 4 matrix).Then show how you would compute F and G for the standard state-variable description of the equations of motion.]
Solution:
(a) It is impossible because the acceleration terms are coupled.
(b) 1 0 0 00 I +mpl
2 0 −mpl0 0 1 00 −mpl 0 mt +mp
úθ
θúxx
=
0 1 0 0mpgl 0 0 00 0 0 10 0 0 −b
θúθxúx
+0001
u
Ex = F0x+G0ux = E−1F0x+E−1G0u
F = E−1F0,G = E−1G0

27
10. The longitudinal linearized equations of motion of a Boeing 747 are givenin Eq. (9.28). Using MATLAB or other computer aid:
(a) Determine the response of the altitude h for a 2-sec pulse of the ele-vator with a magnitude of 2. Note that, since Eq. (9.28) representsa set of linearized equations, the state variables actually representthe deviation of the state from the nominal operating point. Forexample, h represents the amount the altitude of the aircraft differsfrom 20,000 ft.
(b) Consider using the feedback law
δe = Khh+ δe,ext (127)
where the elevator input angle is the sum of a term proportionalto the error in altitude h plus an external input (a disturbance orcommand input). Note from part (a) that a positive change inelevator causes a negative change in altitude, so that the proposedproportional feedback law has the logical sign to anticipate a stablesystem provided Kh > 0. By trial and error, try to Þnd a value forthe feedback gain Kh such that a 2
pulse of 2 sec on δe,ext yields amore stable altitude response.
(c) If you have trouble Þnding a value of Kh that produces a stableresponse, try modifying the feedback law to include information onpitch rate q :
δe = Khh+Kqq + δe,ext (128)
Use trial and error to pick appropriate values for both Kh and Kq.Assume the same type of pulse input for δe,ext as in part (b).
(d) Show that the further introduction of pitch-angle feedback, θ, suchthat
δe = Khh+Kqq +Kθθ + δe,ext (129)
allows you to decrease the time it takes for the altitude to settle backto its nominal value, as well as to decrease the value of Kh requiredfor a stable response. Note that, although Kh = 0 produces stablealtitude behavior, we require Kh > 0 in order to guarantee thath→ 0 (so there will be no steady-state error).
Solution:

28 CHAPTER 2. DYNAMIC MODELS
0 1 2 3 4 5 6 7 8 9 10-350
-300
-250
-200
-150
-100
-50
0
50 2 deg. pulse applied between t = 1 and t =3 sec.
(a)
Gexte,
D
ehqwu ,,,,
(b) Requires 0 < Kh <∼ 10−6 for stability, but yields very large oscilla-tory altitude variations.
(c) Numbers like Kh < 0.001 and Kq > 300 yields somewhat reasonablealtitude behavior ( altitude variations are stable and on the orderof a few hundred feet), but settling time is on the order of tens ofminutes.
(d) Kh = 0.005, Kθ = 25, and Kq = 10 (for example) yield maximumaltitude deviation of less than 50ft, plus a settling time of about 30

29
second.clear all, close allF = [ -0.00643 0.0263 0 -32.2 0;-0.0941 -0.624 820 0 0;-0.000222 -0.00153 -0.668 0 0;0 0 1 0 0;0 -1 0 830 0 ];G = [ 0; -32.7; -2.08; 0; 0 ];J = 0;x0 = [ 0; 0; 0; 0; 0 ];
% part a.Hh = [ 0 0 0 0 1 ];[ num, den ] = ss2tf( F, G, Hh, J );sysa = tf( num, den );T = 0:0.01:10;u = (2/180*pi)*rectpuls( (T-2)/2 );ya = lsim( sysa, u, T, x0 );
Þgure(1)plot(T,ya)title( 2 deg. pulse applied between t = 1 and t =3 sec. );
Problems and Solutions for Section 2.3
11. A Þrst step toward a realistic model of an op amp is given by the equationsbelow and shown in Fig. 2.41.
Vout =107
s+ 1[V+ − V−]
i+ = i− = 0
(a) Find the transfer function of the simple ampliÞcation circuit shownusing this model.
Solution:
(a) As i− = 0,
Vin − V−Rin
=V− − VoutRf
V− =Rf
Rin +RfVin +
RinRin +Rf
Vout

30 CHAPTER 2. DYNAMIC MODELS
Figure 2.41: Circuit for Problem 11.
Figure 2.42: Circuit for Problem 12.
Vout =107
s+ 1[V+ − V−]
=107
s+ 1
µV+ − Rf
Rin +RfVin − Rin
Rin +RfVout
¶= − 107
s+ 1
µRf
Rin +RfVin +
RinRin +Rf
Vout
¶
VoutVin
=−107 Rf
Rin+Rf
s+ 1 + 107 Rin
Rin+Rf
12. Show that the op amp connection shown in Fig. 2.42 results in Vo = Vinif the op amp is ideal. Give the transfer function if the op amp has thenon-ideal transfer function of Problem 2.11.
Solution:

31
Figure 2.43: Circuit for Problem 13.
Ideal case:
Vin = V+
V+ = V−V− = Vout
Non-ideal case:
Vin = V+, V− = Vout
but,
V+ 6= V−instead,
Vout =107
s+ 1[V+ − V−]
=107
s+ 1[Vin − Vout]
so,
VoutVin
=107
s+1
1 + 107
s+1
=107
s+ 1 + 107∼= 107
s+ 107
13. Show that, with the non-ideal transfer function of Problem 2.11, the opamp connection shown in Fig. 2.43 is unstable.

32 CHAPTER 2. DYNAMIC MODELS
Figure 2.44: Op Amp circuit for Problem 14.
Solution:
Vin = V−, V+ = Vout
Vout =107
s+ 1[V+ − V−]
=107
s+ 1[Vout − Vin]
VoutVin
=107
s+1
107
s+1 − 1=
107
−s− 1 + 107∼= −107
s− 107
The transfer function has a denominator with s− 107, and the minus signmeans the exponential time function is increasing, which means that ithas an unstable root.
14. A common connection for a motor power ampliÞer is shown in Fig. 2.44.The idea is to have the motor current follow the input voltage and theconnection is called a current ampliÞer. Assume that the sense resistor,Rs is very small compared with the feedback resistor, R and Þnd thetransfer function from Vin to Ia.
Solution:

33
[Note to Instructors: You might want to assign thisproblem with Rf = ∞,meaning no feedback from theoutput voltage.]At node A,
Vin − 0Rin
+Vout − 0Rf
+VB − 0R
= 0 (130)
At node B, with Rs ¿ R
Ia +0− VBR
+0− VBRs
= 0 (131)
VB =RRsR+Rs
Ia
VB ≈ RsIa
The dynamics of the motor is modeled with negligible inductance as
Jmθm + b úθm = KtIa (132)
JmsΩ+ bΩ = KtIa
At the output, from Eq. 131. Eq. 132 and the motor equation Va =IaRa +KesΩ
Vo = IaRs + Va
= IaRs + IaRa +KeKtIaJms+ b
Substituting this into Eq.130
VinRin
+1
Rf
·IaRs + IaRa +Ke
KtIaJms+ b
¸+IaRsR
= 0
This expression shows that, in the steady state when s → 0, the currentis proportional to the input voltage.
If fact, the current ampliÞer normally has no feedback form the outputvoltage, in which case Rf →∞ and we have simply
IaVin
= − R
RinRs
15. An op amp connection with feedback to both the negative and the positiveterminals is shown in Fig 2.45. If the op amp has the non-ideal transferfunction given in Problem 11, give the maximum value possible for the
positive feedback ratio, P =r
r +Rin terms of the negative feedback
ratio,N =Rin
Rin +Rffor the circuit to remain stable.

34 CHAPTER 2. DYNAMIC MODELS
Figure 2.45: Op Amp circuit for Problem 15.
Solution:
Vin − V−Rin
+Vout − V−Rf
= 0
Vout − V+
R+0− V+
r= 0
V− =Rf
Rin +RfVin +
RinRin +Rf
Vout
= (1−N)Vin +NVoutV+ =
r
r +RVout = PVout
Vout =107
s+ 1[V+ − V−]
=107
s+ 1[PVout − (1−N)Vin −NVout]

35
VoutVin
=
107
s+ 1(1−N)
107
s+ 1P − 107
s+ 1N − 1
=107 (1−N)
107P − 107N − (s+ 1)=
−107 (1−N)s+ 1− 107P + 107N
0 < 1− 107P + 107N
P < N + 10−7
16. Write the dynamic equations and Þnd the transfer functions for the circuitsshown in Fig. 2.46.
(a) lead circuit
(b) lag circuit.
(c) notch circuit
Solution:
(a) lead circuit
inV outV
C
V
1R 2R
fR
Vin − VR2
+0− VR1
+ Cd
dt(0− V ) = 0 (133)
Vin − VR2
=0− VoutRf
(134)
We need to eliminate V . From Eq. 134,
V = Vin +R2
RfVout

36 CHAPTER 2. DYNAMIC MODELS
Figure 2.46: Lead (a), lag (b), notch (c) circuits

37
Substitute V s in Eq. 133.
1
R2
µVin − Vin − R2
RfVout
¶− 1
R1
µVin +
R2
RfVout
¶−C
µúVin +
R2
RfúVout
¶= 0
1
R1Vin + C úVin = − 1
Rf
·µ1 +
R2
R1
¶Vout +R2C úVout
¸Laplace Transform
VoutVin
=Cs+ 1
R1
− 1Rf
³R2Cs+ 1 +
R2
R1
´= −Rf
R2
s+ 1R1C
s+ 1R1C
+ 1R2C
We can see that the pole is at the left side of the zero, which meansa lead compensator.
(b) lag circuit
inR
inV outV
1R2R
C
V
Vin − 0Rin
=0− VR2
=V − VoutR1
+ Cd
dt(V − Vout)
V = − R2
RinVin
VinRin
=− R2
RinVin − VoutR1
+ Cd
dt
µ− R2
RinVin − Vout
¶=
1
R1
µ− R2
RinVin − Vout
¶+ C
µ− R2
RinúVin − úVout
¶1
Rin
µ1 +
R2
R1
¶Vin +
1
RinR2C úVin = − 1
R1Vout − C úVout

38 CHAPTER 2. DYNAMIC MODELS
VoutVin
= − R1
Rin
R2Cs+ 1 +R2
R1
R1Cs+ 1
= − R2
Rin
s+ 1R2C
+ 1R1C
s+ 1R1C
We can see that the pole is at the right side of the zero, which meansa lag compensator.
(c) notch circuit
outV
C1VC
C2
R R2/R
inV
2V
Cd
dt(Vin − V1) +
0− V1
R/2+ C
d
dt(Vout − V1) = 0
Vin − V2
R+ 2C
d
dt(0− V2) +
Vout − V2
R= 0
Cd
dt(V1 − Vout) + V2 − Vout
R= 0
We need to eliminat V1, V2 from three equations and Þnd the relationbetween Vin and Vout
V1 =Cs
2¡Cs+ 1
R
¢ (Vin + Vout)V2 =
1R
2¡Cs+ 1
R
¢ (Vin + Vout)
CsV1 − CsVout + 1
RV2 − 1
RVout
= CsCs
2¡Cs+ 1
R
¢ (Vin + Vout) + 1
R
1R
2¡Cs+ 1
R
¢ (Vin + Vout)−µCs+ 1
R
¶Vout
= 0

39
C2s2 + 1R2
2¡Cs+ 1
R
¢Vin =
"µCs+
1
R
¶− C2s2 + 1
R2
2¡Cs+ 1
R
¢#VoutVoutVin
=
C2s2+ 1R2
2(Cs+ 1R)¡
Cs+ 1R
¢− C2s2+ 1R2
2(Cs+ 1R)
=
¡C2s2 + 1
R2
¢2¡Cs+ 1
R
¢2 − ¡C2s2 + 1R2
¢=
C2¡s2 + 1
R2C2
¢C2s2 + 4CsR + 1
R2
=s2 + 1
R2C2
s2 + 4RC s+
1R2C2
.
17. The very ßexible circuit shown in Fig. 2.47 is called a biquad becauseits transfer function can be made to be the ratio of two second-order orquadratic polynomials. By selecting different values for Ra, Rb, Rc, andRd the circuit can realise a low-pass, band-pass, high-pass, or band-reject(notch) Þlter.
(a) Show that if Ra = R, and Rb = Rc = Rd =∞, the transfer functionfrom Vin to Vout can be written as the low-pass Þlter
VoutVin
=A
s2
ω2n
+ 2ζs
ωn+ 1
(135)
where
A =R
R1
ωn =1
RC
ζ =R
2R2
(b) Using the MATLAB comand step compute and plot on the samegraph the step responses for the biquad of Fig. 2.47 for A = 1,ωn = 1, and ζ = 0.1, 0.5, and 1.0.
Solution:
Before going in to the speciÞc problem, lets Þnd the general form of thetransfer function for the circuit.

40 CHAPTER 2. DYNAMIC MODELS
Figure 2.47: Op-amp biquad
VinR1
+V3
R= −
µV1
R2+ C úV1
¶V1
R= −C úV2
V3 = −V2
V3
Ra+V2
Rb+V1
Rc+VinRd
= −VoutR
There are a couple of methods to Þnd the transfer function from Vin toVout with set of equations but for this problem, we will directly solve forthe values we want along with the Laplace Transform.
From the Þrst three equations, slove for V1,V2.
VinR1
+V3
R= −
µ1
R2+ Cs
¶V1
V1
R= −CsV2
V3 = −V2
µ1
R2+ Cs
¶V1 − 1
RV2 = − 1
R1Vin
1
RV1 + CsV2 = 0

41
·1R2+ Cs − 1
R1R Cs
¸ ·V1
V2
¸=
· − 1R1Vin0
¸
·V1
V2
¸=
1³1R2+ Cs
´Cs+ 1
R2
·Cs 1
R− 1R
1R2+ Cs
¸ · − 1R1Vin0
¸
=1
C2s2 + CR2s+ 1
R2
· − CR1sVin
1RR1
Vin
¸
Plug in V1, V2 and V3 to the fourth equation.
V3
Ra+V2
Rb+V1
Rc+VinRd
=
µ− 1
Ra+1
Rb
¶V2 +
1
RcV1 +
1
RdVin
=
µ− 1
Ra+1
Rb
¶ 1RR1
C2s2 + CR2s+ 1
R2
Vin +1
Rc
− CR1s
C2s2 + CR2s+ 1
R2
Vin +1
RdVin
=
"µ− 1
Ra+1
Rb
¶ 1RR1
C2s2 + CR2s+ 1
R2
+1
Rc
− CR1s
C2s2 + CR2s+ 1
R2
+1
Rd
#Vin
= −VoutR
Finally,
VoutVin
= −R"µ− 1
Ra+1
Rb
¶ 1RR1
C2s2 + CR2s+ 1
R2
+1
Rc
− CR1s
C2s2 + CR2s+ 1
R2
+1
Rd
#
= −R³− 1Ra+ 1
Rb
´1
RR1− 1
Rc
CR1s+ 1
Rd
³C2s2 + C
R2s+ 1
R2
´C2s2 + C
R2s+ 1
R2
= − R
C2
C2
Rds2 +
³1Rd
CR2− 1
Rc
CR1
´s+
³1Rb− 1
Ra
´1
RR1+ 1
Rd
1R2
s2 + 1R2C
s+ 1(RC)2
(a) If Ra = R, and Rb = Rc = Rd =∞,

42 CHAPTER 2. DYNAMIC MODELS
VoutVin
= − R
C2
C2
Rds2 +
³1Rd
CR2− 1
Rc
CR1
´s+
³1Rb− 1
Ra
´1
RR1+ 1
Rd
1R2
s2 + 1R2C
s+ 1(RC)2
= − R
C2
− 1R
1RR1
s2 + 1R2C
s+ 1(RC)2
=1
RR1C2
s2 + 1R2C
s+ 1(RC)2
=RR1
(RC)2 s2 + R2CR2s+ 1
So,
R
R1= A
(RC)2=
1
ω2n
2ζ
ωn=
R2C
R2
ωn =1
RC
ζ =ωn2
R2C
R2=
1
2RC
R2C
R2=
R
2R2
(b) Step response using MatLab

43
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8step response
z=0.1z=0.5z=1.0
% Problem 2.17A = 1;wn = 1;z = [ 0.1 0.5 1.0 ];
hold onfor i = 1:3
num = [ A ];den = [ 1/wn2 2*z(i)/wn 1 ]step( num, den )
endhold off
18. Find the equations and transfer function for the biquad circuit of Fig. 2.47if Ra = R, Rd = R1 and Rb = Rc =∞.
Solution:

44 CHAPTER 2. DYNAMIC MODELS
VoutVin
= − R
C2
C2
Rds2 +
³1Rd
CR2− 1
Rc
CR1
´s+
³1Rb− 1
Ra
´1
RR1+ 1
Rd
1R2
s2 + 1R2C
s+ 1(RC)2
= − R
C2
C2
R1s2 +
³1R1
CR2
´s+
¡− 1R
¢1
RR1+ 1
R1
1R2
s2 + 1R2C
s+ 1(RC)2
= − RR1
s2 + 1R2C
s
s2 + 1R2C
s+ 1(RC)2
Problems and Solutions for Section 2.4
19. The torque constant of a motor is the ratio of torque to current and isoften given in ounce-inches per ampere. (ounce-inches have dimensionforce-distance where an ounce is 1/16 of a pound.) The electric constantof a motor is the ratio of back emf to speed and is often given in volts per1000 rpm. In consistent units the two constants are the same for a givenmotor.
(a) Show that the units ounce-inches per ampere are proportional tovolts per 1000 rpm by reducing both to MKS (SI) units.
(b) A certain motor has a back emf of 25 V at 1000 rpm. What is itstorque constant in ounce-inches per ampere?
(c) What is the torque constant of the motor of part (b) in newton-metersper ampere?
Solution:
Before going into the problem, lets review the units.
Some remarks on non SI units.— Ounce
1oz = 2.835× 10−2 kg
Originally ounce is a unit of mass, but like pounds, it is com-monly used as a unit of force. If we translate it as force,
1oz(f) = 2.835× 10−2 kgf = 2.835× 10−2 × 9.81N = 0.2778N— Inch
1 in = 2.540× 10−2m

45
— RPM (Revolution per Minute)
1 RPM =2π rad
60 s=π
30rad / s
Relation between SI units— Voltage and Current
V olts · Current(amps) = Power = Energy(joules)/ sec
V olts =Joules/ sec
amps=Newton−meters/ sec
amps
(a) Relation between torque constant and electric constant.
Torque constant:
1 ounce× 1 inch1 Ampere
=0.2778N×2.540× 10−2m
1A= 7.056×10−3Nm /A
Electric constant:
1V
1000 RPM=
1J /(A sec)
1000× π30 rad / s
= 9.549× 10−3Nm /A
So,
1 oz in /A =7.056× 10−3
9.549× 10−3 V /1000 RPM
= (0.739)V /1000 RPM
(b)
25V /1000 RPM = 25× 1
0.739oz in /A = 33.872 oz in /A
(c)
25V /1000 RPM = 25× 9.549× 10−3Nm /A = 0.239Nm /A
20. A simpliÞed sketch of a computer tape drive is given in Fig. 2.48.
(a) Write the equations of motion in terms of the parameters listed below.K and B represent the spring constant and the damping of tapestretch, respectively, and ω1 and ω2 are angular velocities. A positivecurrent applied to the DC motor will provide a torque on the capstanin the clockwise direction as shown by the arrow. Assume positive

46 CHAPTER 2. DYNAMIC MODELS
Figure 2.48: Tape drive schematic

47
angular velocities of the two wheels are in the directions shown bythe arrows.
J1 = 5× 10−5 kg ·m2, motor and capstan inertia
B1 = 1× 10−2 N ·m · sec, motor dampingr1 = 2× 10−2 m
Kt = 3× 10−2 N ·m/A, motor− torque constantK = 2× 104 N/m
B = 20 N/m · secr2 = 2× 10−2 m
J2 = 2× 10−5 kg ·m2
B2 = 2× 10−2 N ·m · sec, viscous damping, idlerF = 6 N, constant force
úx1 = tape velocity N/ sec (variable to be controlled)
(b) Write the equations in state-variable form as a set of Þrst-order dif-ferential equations. Use the variables (x1,ω1, x2,ω2, ia).
(c) Use the values in part (a) and use MATLAB to Þnd the response ofx1 to a step input in ia.
Solution:
)( 21 xxK
)( 21 xxB
atm iKT
11B
)( 12 xxK
)( 12 xxB
22B
F
1r 2r
(a)
J1 úω1 = Tm −B1ω1 − [B ( úx1 − úx2) +K (x1 − x2)] r1
J2 úω2 = −B2ω2 − [B ( úx2 − úx1) +K (x2 − x1)] r2 + Fr2
Tm = Ktia
úx1 = r1ω1
úx2 = r2ω2
(b) Because of the constant force F from the vacuum column, the springwill be stretched in the steady state by ∆xss = F/K and the motortorque will have a constant component

48 CHAPTER 2. DYNAMIC MODELS
Tmss= −Fr1,
and thus the steady current to provide the torque will be
iass= Tmss
/Kt.
The state-variable form equations will assume this bias current isapplied to counterack the torque and ia is the deviation from this bias,the tape positions (x1 and x2) are deviations from their stretchedpositions, and F = 0. The equations become
úx1 = r1ω1
J1 úω1 = −Br1 ( úx1 − úx2)−B1ω1 −Kr1 (x1 − x2) +Ktia
úx2 = r2ω2
J2 úω2 = −Br2 ( úx2 − úx1)−B2ω2 −Kr2 (x2 − x1)
By substituting for úx1 and úx2 in the 2nd and 4th equations, we arriveat the state-variable form
úx1
úω1
úx2
úω2
=
0 r1 0 0
− 1J1Kr1 − 1
J1(B1 + r
21B)
1J1Kr1
1J1r1Br2
0 0 0 r21J2Kr2
1J2r2Br1 − 1
J2Kr2 − 1
J2(B2 + r
22B)
x1
ω1
x2
ω2
+
0Kt00
ia
y =£1 0 0 0
¤x1
ω1
x2
ω2
(c) Note that this is the perturbation of the tape speed at the head fromits steady state.

49
Time (sec.)
Am
plitu
deStep Response
0 0.005 0.01 0.015 0.02 0.025 0.030
0.005
0.01
0.015
0.02
0.025From: U(1)
To: Y
(1)

50 CHAPTER 2. DYNAMIC MODELS
% Problem 2.20clear all, close all
% dataJ1 = 5e-5;B1 = 1e-2;r1 = 2e-2;Kt = 3e-2;K = 2e4;B = 20;r2 = 2e-2;J2 = 2e-5;B2 = 2e-2;
% state-variable formF = [ 0 r1 0 0; -K*r1/J1 -(B1+B*r12)/J1 K1*r1/J1 -B*r1*r2/J1; 0 0 0 r2;
Kr2/J2 B*r1r2/J2 -Kr2/J2 -(B2+B*r22)/J2];G = [ 0; Kt; 0; 0];H = [1 0 0 0 ];J = 0;
% transfer function[ num, den ] = ss2tf( F, G, H, J );step(num,den);
21. Assume the driving force on the hanging crane of Fig. 2.14 is provided bya motor mounted on the cab with one of the support wheels connecteddirectly to the motors armature shaft. The motor constants are Ke andKt, and the circuit driving the motor has a resistance Ra and negligibleinductance. The wheel has a radius r. Write the equations of motionrelating the applied motor voltage to the cab position and load angle.
Solution:
The dynamics of the hanging crane are given by Eqs. 2.30 and 2.31,¡I +mpl
2¢θ +mpgl sin θ = −mplx cos θ
(mt +mp) x+ b úx+mplθ cos θ −mpl úθ2sin θ = u
where x is the position of the cab, θ is the angle of the load, and u is theapplied force that will be produced by the motor. Our task here is to Þndthe force applied by the motor. Normally, the rotational dynamics of amotor is
J1θm + b1 úθm = Tm = Ktia
where the current is found from the motor circuit, which reduces to
Raia = Va −Keúθm

51
for the case where the inductance is negligible. However, since the motoris geared directly to the cab, θm and x are related kinematically by
x = rθm
and we can neglect any extra inertia or damping from the motor itselfcompared to the inertia and damping of the large cab. Therefore we canrewrite the two motor equations in terms of the force applied by the motoron the cab
u = Tm/r = Ktia/r
ia = (Va −Keúθm)/Ra
whereúθm = úx/r
These equations, along with¡I +mpl
2¢θ +mpgl sin θ = −mplx cos θ
(mt +mp) x+ b úx+mplθ cos θ −mpl úθ2sin θ = u
constitute the required relations.
22. The electromechanical system shown in Fig. 2.49 represents a simpliÞedmodel of a capacitor microphone. The system consists in part of a parallelplate capacitor connected into an electric circuit. Capacitor plate a isrigidly fastened to the microphone frame. Sound waves pass through themouthpiece and exert a force fs(t) on plate b, which has mass M and isconnected to the frame by a set of springs and dampers. The capacitanceC is a function of the distance x between the plates, as follows:
C(x) =εA
x,
where
ε = dielectric constant of the material between the plates,
A = surface area of the plates.
The charge q and the voltage e across the plates are related by
q = C(x)e.
The electric Þeld in turn produces the following force fe on the movableplate that opposes its motion:
fe =q2
2εA

52 CHAPTER 2. DYNAMIC MODELS
Figure 2.49: SimpliÞed model for capacitor microphone
(a) Write differential equations that describe the operation of this sys-tem. (It is acceptable to leave in nonlinear form.)
(b) Can one get a linear model?
(c) What is the output of the system?
Solution:
(a) The free body diagram of the capacitor plate b
x
M tfs
Kx
xB
efxsgn
So the equation of motion for the plate is
Mx+B úx+Kx+ fesgn ( úx) = fs (t) .
The equation of motion for the circuit is
v = iR+ Ld
dti+ e
where e is the voltage across the capacitor,
e =1
C
Zi(t)dt

53
Figure 2.50: Motor with a ßexible load
and where C = εA/x, a variable. Because i = ddtq and e = q/C, we
can rewrite the circuit equation as
v = R úq + Lq +qx
εA
In summary, we have these two, couptled, non-linear differentialequation.
Mx+ b úx+ kx+ sgn ( úx)q2
2εA= fs (t)
R úq + Lq +qx
εA= v
(b) The sgn function, q2, and qx, terms make it impossible to determinea useful linearized version.
(c) The signal representing the voice input is the current, i, or úq.
23. A very typical problem of electromechanical position control is an electricmotor driving a load that has one dominant vibration mode. The problemarises in computer-disk-head control, reel-to-reel tape drives, and manyother applications. A schematic diagram is sketched in Fig. 2.50. Themotor has an electrical constant Ke, a torque constant Kt, an armatureinductance La, and a resistance Ra. The rotor has an inertia J1 anda viscous friction B. The load has an inertia J2. The two inertias areconnected by a shaft with a spring constant k and an equivalent viscousdamping b.
(a) Write the equations of motion.
(b) Write the equation as a set of simultaneous Þrst-order equations instate-variable form. Use the state vector x = [θ2
úθ2 θ1úθ1 ia]
T .
Solution:

54 CHAPTER 2. DYNAMIC MODELS
(a) Rotor:
J1θ1 = −B úθ1 − b³úθ1 − úθ2
´− k (θ1 − θ2) + Tm
Load:
J2θ2 = −b³úθ2 − úθ1
´− k (θ2 − θ1)
Circuit:
va −Keúθ1 = La
d
dtia +Raia
Relation between the output torque and the armature current:
Tm = Ktia
(b) State-variable form.
θ2 = − kJ2θ2 − b
J2
úθ2 +k
J2θ1 +
b
J2
úθ1
θ1 =k
J1θ2 +
b
J1
úθ2 − k
J1θ1 − b
J1
úθ1 − B
J1
úθ1 +KtJ1ia
úia = −KeLaúθ1 − Ra
Laia +
1
Lava
úθ2
θ2úθ1
θ1úia
=
0 1 0 0 0− kJ2
− bJ2
kJ2
bJ2
0
0 0 0 1 0kJ1
bJ1
− kJ1
− bJ1− B
J1
Kt
J1
0 0 0 −Ke
La−Ra
La
θ2úθ2
θ1úθ1
ia
+
00001La
va
Problems and Solutions for Section 2.524. A precision-table leveling scheme shown in Fig. 2.51 relies on thermal
expansion of actuators under two corners to level the table by raising orlowering their respective corners. The parameters are:
Tact = actuator temperature,
Tamb = ambient air temperature,
Rf = heat− ßow coefficient between the actuator and the air,C = thermal capacity of the actuator,
R = resistance of the heater.
Assume that (1) the actuator acts as a pure electric resistance, (2) theheat ßow into the actuator is proportional to the electric power input,

55
Figure 2.51: (a) Precision table kept level by actuators; (b) side view of oneactuator
and (3) the motion d is proportional to the difference between Tact andTamb due to thermal expansion. Find the differential equations relatingthe height of the actuator d versus the applied voltage vi.
Solution:
Electric power in is proportional to the heat ßow in
úQin = Kqv2i
R
and the heat ßow out is from heat transfer to the ambient air
úQout =1
Rf(Tact − Tamb) .
The temperature is governed by the difference in heat ßows
úTact =1
C
³úQin − úQout
´=
1
C
µKqv2i
R− 1
Rf(Tact − Tamb)
¶and the actuator displacement is
d = K (Tact − Tamb) .
where Tamb is a given function of time, most likely a constant for a tableinside a room. The system input is vi and the system output is d.

56 CHAPTER 2. DYNAMIC MODELS
Figure 2.52:
25. An air conditioner supplies cold air at the same temperature to each roomon the fourth ßoor of the high-rise building shown in Fig. 2.52(a). The ßoorplan is shown in Fig. 2.52(b). The cold air ßow produces an equal amountof heat ßow q out of each room. Write a set of differential equationsgoverning the temperature in each room, where
To = temperature outside the building,
Ro = resistance to heat ßow through the outer walls,
Ri = resistance to heat ßow through the inner walls.
Assume that (1) all rooms are perfect squares, (2) there is no heat ßowthrough the ßoors or ceilings, and (3) the temperature in each room isuniform throughout the room. Take advantage of symmetry to reduce thenumber of differential equations to three.
Solution:
We can classify 9 rooms to 3 types by the number of outer walls they have.
Type 1 Type 2 Type 1Type 2 Type 3 Type 2Type 1 Type 2 Type 1
We can expect the hotest rooms on the outside and the corners hotest ofall, but solving the equations would conÞrm this intuitive result. That is,
To > T1 > T2 > T3

57
and, with a same cold air ßow into every room, the ones with some sunload will be hotest.
Lets redeÞnce the resistances
Ro = resistance to heat ßow through one unit of outer wall
Ri = resistance to heat ßow through one unit of inner wall
Room type 1:
qout =2
Ri(T1 − T2) + q
qin =2
Ro(To − T1)
úT1 =1
C(qin − qout)
=1
C
·2
Ro(To − T1)− 2
Ri(T1 − T2)− q
¸Room type 2:
qin =1
Ro(To − T2) +
2
Ri(T1 − T2)
qout =1
Ri(T2 − T3) + q
úT2 =1
C
·1
Ro(To − T2) +
2
Ri(T1 − T2)− 1
Ri(T2 − T3)− q
¸Room type 3:
qin =4
Ri(T2 − T3)
qout = q
úT3 =1
C
·4
Ri(T2 − T3)− q
¸

58 CHAPTER 2. DYNAMIC MODELS
Figure 2.53: Two-tank ßuid-ßow system for Problem 26
26. For the two-tank ßuid-ßow system shown in Fig. 2.53, Þnd the differentialequations relating the ßow into the Þrst tank to the ßow out of the secondtank.
Solution:
This is a variation on the problem solved in Example 2.20 and the deÞni-tions of terms is taken from that. From the relation between the heightof the water and mass ßow rate, the continuity equations are
úm1 = ρA1úh1 = win − w
úm2 = ρA2úh2 = w − wout
Also from the relation between the pressure and outgoing mass ßow rate,
w =1
R1(ρgh1)
12
wout =1
R2(ρgh2)
12
Finally,
úh1 = − 1
ρA1R1(ρgh1)
12 +
1
ρA1win
úh2 =1
ρA2R1(ρgh1)
12 − 1
ρA2R2(ρgh2)
12 .
.
27. A laboratory experiment in the ßow of water through two tanks is sketchedin Fig. 2.54. Assume that Eq. (2.86) describes ßow through the equal-sizedholes at points A, B, or C.

59
Figure 2.54:
(a) With holes at A and C but none at B, write the equations of motionfor this system in terms of h1 and h2. Assume that h3 = 20 cm,h1 > 20 cm, and h2 < 20 cm. When h2 = 10 cm, the outßow is200 g/min.
(b) At h1 = 30 cm and h2 = 10 cm, compute a linearized model and thetransfer function from pump ßow (in cubic centimeters per minute)to h2.
(c) Repeat parts (a) and (b) assuming hole A is closed and hole B isopen.
Solution:
(a) Following the solution of Example 2.20, and assuming the area ofboth tanks is A, the values given for the heights ensure that thewater will ßow according to
WA =1
R[ρg (h1 − h3)]
12
WC =1
R[ρgh2]
12
WA −WC = ρA úh2
Win −WA = ρA úh1
From the outßow information given, we can compute the oriÞce re-sistance, R, noting that for water, ρ = 1 gram/cc and g = 981

60 CHAPTER 2. DYNAMIC MODELS
cm/sec2 ' 1000 cm/sec2.
WC = 200 g /mn =1
R
pρgh2 =
1
R
pρg × 10 cm
R =
√ρg × 10 cm200 g /mn
=
p1 g / cm3×1000 cm / s2×10 cm
200 g /60 s
=100
20060
rg cm2 s2
cm3 s2 g2= 30 g−
12 cm−
12
(b) The nonlinear equations from above are
úh1 = − 1
ρAR
pρg (h1 − h3) +
1
ρAWin
úh2 =1
ρAR
pρg (h1 − h3)− 1
ρAR
pρgh2
The square root functions need to be linearized about the nominalheights. In general the square root function can be linearized asbelow
px0 + δx =
sx0
µ1 +
δx
x0
¶∼= √
x0
µ1 +
1
2
δx
x0
¶So lets assume that h1 = h10+δh1 and h2 = h20+δh2 where h10 = 30cm, h20 = 10 cm, and h3 = 20 cm. And for round numbers, letsassume the area of each tank A = 100 cm2. The equations above thenreduce to
δ úh1 = − 1
(1)(100)(30)
p(1)(1000) (30 + δh1 − 20) + 1
(1)(100)Win
δ úh2 =1
(1)(100)(30)
p(1)(1000) (30 + δh1 − 20)− 1
(1)(100)(30)
p(1)(1000)(10 + δh2)
which, with the square root approximations, is equivalent to,
δ úh1 = − 1
(30)(1 +
1
20δh1) +
1
(100)Win
δ úh2 =1
(30)(1 +
1
20δh1)− 1
(30)(1 +
1
20δh2)
The nominal inßow Wnom = 103 cc/sec is required in order for the
system to be in equilibrium, as can be seen from the Þrst equation.

61
So we will deÞne the total inßow to be Win = Wnom + δW, so theequations become
δ úh1 = − 1
(30)(1 +
1
20δh1) +
1
(100)Wnom +
1
(100)δW
δ úh2 =1
(30)(1 +
1
20δh1)− 1
(30)(1 +
1
20δh2)
or, with the nominal inßow included, the equations reduce to
δ úh1 = − 1
600δh1 +
1
100δW
δ úh2 =1
600δh1 − 1
600δh2
Taking the Laplace transform of these two equations, and solving forthe desired transfer function (in cc/sec) yields
δH2(s)
δW (s)=
1
600
0.01
(s+ 1/600)2.
which becomes, with the inßow in grams/min,
δH2(s)
δW (s)=
1
600
(0.01)(60)
(s+ 1/600)2= .
0.001
(s+ 1/600)2
(c) With hole B open and hole A closed, the relevant relations are
Win −WB = ρA úh1
WB =1
R
pρg(h1 − h2)
WB −WC = ρA úh2
WC =1
R
pρgh2
úh1 = − 1
ρAR
pρg(h1 − h2) +
1
ρAWin
úh2 =1
ρAR
pρg(h1 − h2)− 1
ρAR
pρgh2
With the same deÞnitions for the perturbed quantities as for part(b), we obtain
δ úh1 = − 1
(1)(100)(30)
p(1)(1000)(30 + δh1 − 10− δh2) +
1
(1)(100)Win
δ úh2 =1
(1)(100)(30)
p(1)(1000)(30 + δh1 − 10− δh2)
− 1
(1)(100)(30)
p(1)(1000)(10 + δh2)

62 CHAPTER 2. DYNAMIC MODELS
which, with the linearization carried out, reduces to
δ úh1 = −√2
30(1 +
1
40δh1 − 1
40δh2) +
1
100Win
δ úh2 =
√2
30(1 +
1
40δh1 − 1
40δh2)− 1
30(1 +
1
20δh2)
and with the nominal ßow rate of Win =10√
23 removed
δ úh1 = −√2
1200(δh1 − δh2) +
1
100δW
δ úh2 =
√2
1200δh1 + (
√2
1200− 1
600)δh2 +
√2− 130
However, unlike part (b), holding the nominal ßow rate maintains h1
at equilibrium, but h2 will not stay at equilibrium. Instead, therewill be a constant term increasing h2. Thus the standard transferfunction will not result.
28. The equations for heating a house are given by Eqs. (2.73) and (2.74)and, in a particular case can be written with time in hours as
CdThdt
= Ku− Th − ToR
where
(a) C is the Thermal capacity of the house, BTU/oF
(b) Th is the temperature in the house,oF
(c) To is the temperature outside the house,oF
(d) K is the heat rating of the furnace, = 90, 000 BTU/hour
(e) R is the thermal resistance, oF per BTU/hour
(f) u is the furnace switch, =1 if the furnace is on and =0 if the furnaceis off.
It is measured that, with the outside temperature at 32 oF and the houseat 60 oF , the furnace raises the temperature 2 oF in 6 minutes (0.1hour). With the furnace off, the house temperature falls 2 oF in 40minutes. What are the values of C and R for the house?
Solution:
For the Þrst case, the furnace is on which means u = 1.
CdThdt
= K − 1
R(Th − To)
úTh =K
C− 1
RC(Th − To)

63
and with the furnace off,
úTh = − 1
RC(Th − To)
In both cases, it is a Þrst order system and thus the solutions involveexponentials in time. The approximate answer can be obtained by simplylooking at the slope of the exponential at the outset. This will be fairlyaccurate because the temperature is only changing by 2 degrees and thisrepresents a small fraction of the 30 degree temperature difference. Letssolve the equation for the furnace off Þrst
∆Th∆t
= − 1
RC(Th − To)
plugging in the numbers available, the temperature falls 2 degrees in 2/3hr, we have
2
2/3= − 1
RC(60− 32)
which means thatRC = 28/3
For the second case, the furnace is turned on which means
∆Th∆t
=K
C− 1
RC(Th − To)
and plugging in the numbers yields
2
0.1=90, 000
C− 1
28/3(60− 32)
and we have
C =90, 000
23= 3910
R =RC
C=28/3
3910= 0.00240
Problems and Solutions for Section 2.6
29. Figure 2.55 shows a simple pendulum system in which a cord is wrappedaround a Þxed cylinder. The motion of the system that results is describedby the differential equation
(l +Rθ)θ + g sin θ +R úθ2= 0,
where
l = length of the cord in the vertical (down) position,
R = radius of the cylinder.

64 CHAPTER 2. DYNAMIC MODELS
Figure 2.55: Motion of cord wrapped around a Þxed cylinder
(a) Write the state-variable equations for this system.
(b) Linearize the equation around the point θ = 0, and show that forsmall values of θ the system equation reduces to an equation for asimple pendulum, that is,
θ + (g/l)θ = 0.
Solution:
(a) This is a second order non-linear differential equation in θ. Let x =£úθ θ
¤T.
úx1 = θ = −Rúθ2+ g sin θ
(l +Rθ)= −Rx
21 + g sinx2
(l +Rx2)
úx2 = úθ = x1
(b) For small values of θ.
(l +Rθ) ∼= l
sin θ ∼= θúθ2 ∼= 0
lθ + gθ = 0
θ +g
lθ = 0

65
Figure 2.56: Schematic diagram of the GP-B satellite and probe
30. A schematic for the satellite and scientiÞc probe for the Gravity Probe-B(GP-B) experiment is sketched in Fig. 2.56. Assume the mass of thespacecraft plus helium tank, m1, is 2000 kg and the mass of the probe,m2, is 1000 kg. A rotor will ßoat inside of the probe and will be forcedto follow the probe with a capacitive forcing mechanism. The springconstant of the coupling, k, is 3.2 × 106. The viscous damping, b, is4.6× 103.
(a) Write the equations of motion for the system consisting of masses m1
and m2 using the inertial position variables, y1 and y2.
(b) The actual disturbance, u, is a micrometerorite and the resultingmotion is very small Therefore, rewrite your equations with thescaled variables z1 =
y1
106 , z2 =y2
106 , .and v = 1000u.
(c) Put the equations in state-variable form using the state x = [z1 úz1 z2 úz2]T ,
the output y = z2, and the input an impulse, u = 10−3δ(t) N sec on
mass m1.
(d) Using the numerical values, enter the equations of motion into Matlabin the form
x = Fx+Gu (136)
y = Hx+ Ju (137)
and deÞne the MATLAB system: sysGPB = ss(F,G,H,J). Plot theresponse of y caused by the impulse with the MATLAB commandimpulse(sysGPB). This is the signal the rotor must follow.
Solution:
(a) The rotor is not part of the problem and can be ignored in writingthe equations of motion
m1y1 = u− k (y1 − y2)− b ( úy1 − úy2)
m2y2 = −k (y2 − y1)− b ( úy2 − úy1)

66 CHAPTER 2. DYNAMIC MODELS
(b) There is an error in the Þrst printing of the book... sorry! Thescaling requested should be
z1 = 106y1, z2 = 10
6y2, and v = 1000u
which makes the units of the output micro-meters instead of meters.Lets put in the values for the parameters as well as scale the variablesas requested.
2000¡10−6z1
¢=
1
1000v − 10−6(3.2× 106) (z1 − z2)− 10−6(4.6× 103) ( úz1 − úz2)
1000¡10−6z2
¢= −10−6(3.2× 106) (z2 − z1)− 10−6(4.6× 103) ( úz2 − úz1)
which becomes
z1 = −(1.6× 103) (z1 − z2)− (2.3) ( úz1 − úz2) +1
2v
z2 = −(3.2× 103) (z2 − z1)− (4.6) ( úz2 − úz1)
(c) The state-variable form for x = [z1 úz1 z2 úz2]T is
úx1 = x2
úx2 = −(1.6× 103) (x1 − x3)− (2.3) (x2 − x4) +1
2v
úx3 = x4
úx4 = −(3.2× 103) (x3 − x1)− (4.6) (x4 − x2)
or, in matrix formúx1
úx2
úx3
úx4
=
0 1 0 0−1.6× 103 −2.3 1.6× 103 2.3
0 0 0 13.2× 103 4.6 −3.2× 103 −4.6
x1
x2
x3
x4
+01200
vand the output equation is
y = [0 0 1 0]
x1
x2
x3
x4
+ 0(d) The Matlab statements that accomplish
F =
0 1 0 0
−1.6× 103 −2.3 1.6× 103 2.30 0 0 1
1.6× 103 4.6 −1.6× 103 −4.6

67
G =
01200
and H = [0 0 1 0] and J = 0
plus the statements:
sysGPB = ss(F,G,H,J);
y=impulse(sysGPB); % u = 10−3 implies that v=1
plot(t,y)
produce the plot below.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35impulse response of y 2
y 2 (mic
ro-m
eter
s)
Time (sec)
The micro meteorite hits the Þrst mass and imparts a velocity of 0.33µm/sec to the two mass system. It also excites the resonant modeof relative motion between the masses that dies out in less than asecond.
31. The circuit shown in Fig. 2.57 has a nonlinear conductance G such that

68 CHAPTER 2. DYNAMIC MODELS
Figure 2.57: Nonlinear circuit for problem 31
iG = g(vG) = vG(vG − 1)(vG − 4). The state differential equations aredi
dt= −i+ v,
dv
dt= −i+ g(u− v),
where i and v are the states and u is the input.
(a) One equilibrium state occurs when u = 1 yielding i1 = v1 = 0. Findthe other two pairs of v and i that will produce equilibrium.
(b) Find the linearized model of the system about the equilibrium pointu = 1, i = v1 = 0.
(c) Find the linearized models about the other two equilibrium points.
Solution:
(a) Equilibrium
di
dt= −i+ v = 0
dv
dt= −i+ g(u− v) = 0
g(u− v)− i = (u− v)((u− v)− 1)((u− v)− 4)− v = 0as u = 1,
(1− v)(−v)(−3− v)− v= v
¡v2 + 2v − 2¢ = 0v = 0,−1±
√3
So,i = v = 0,−1±
√3

69
(b) Lets replace u, v, and i by 1 + δu, δv, and δi.
δúi = −δi+ δv,δ úv = −δi+ g(1 + δu− δv)
= −δi+ (1 + δu− δv)((1 + δu− δv)− 1)((1 + δu− δv)− 4)= −δi+ (1 + δu− δv) (δu− δv) (δu− δv − 3)∼= −δi− 3δu+ 3δv
d
dt
·δiδv
¸=
· −1 1−1 3
¸ ·δiδv
¸+
·0−3
¸δu
(c) In general the linearized form will be,
d
dt
·δiδv
¸=
· −1 1
−1 ∂g∂v
¸ ·δiδv
¸+
·0∂g∂u
¸δu
As u = 1,
g(u, v) = g(1, v) = v¡v2 + 2v − 2¢
∂g
∂v=
¡v2 + 2v − 2¢+ v (2v + 2)
= 5∓ 2√3 when v = −1±
√3
Also
∂g (u− v)∂v
= −g0 (u− v)
∂g (u− v)∂u
= g0 (u− v) = −∂g∂v= −5± 2
√3
So,
d
dt
·δiδv
¸=
· −1 1
−1 5∓ 2√3¸ ·
δiδv
¸+
·0
−5± 2√3¸δu
32. Consider the circuit shown in Fig. 2.58; u1and u2 are voltage and cur-rent sources, respectively, and R1 and R2 are nonlinear resistors with thefollowing characteristics:
Resistor 1 : i1 = G(v1) = v31
Resistor 2 : v2 = r(i2),
where the function r is deÞned in Fig. 2.59.

70 CHAPTER 2. DYNAMIC MODELS
Figure 2.58: A non-linear circuit
(a) Show that the circuit equations can be written as
úx1 = G(u1 − x1) + u2 − x3
úx2 = x3
úx3 = x1 − x2 − r(x3).
Suppose we have a constant voltage source of 1 Volt at u1 and aconstant current source of 27 Amps; i.e., u0
1 = 1, u02 = 27. Find the
equilibrium state x0 = (x01, x
02, x
03) for the circuit. For a particular
input u0, an equilibrium state of the system is deÞned to be anyconstant state vector whose elements satisfy the relation
úx1 = úx2 = úx3 = 0.
Consequently, any system started in one of its equilibrium states willremain there indeÞnitely until a different input is applied.
(b) Due to disturbances, the initial state (capacitance, voltages, and in-ductor current) is slightly different from the equilibrium and so arethe independent sources; that is,
u(t) = u0 + δu(t)x(t0) = x0(t0) + δx(t0).
Do a small-signal analysis of the network about the equilibrium foundin (a), displaying the equations in the form
δ úx1 = f11δx1 + f12δx2 + f13δx3 + g1δu1 + g2δu2.
(c) Draw the circuit diagram that corresponds to the linearized model.Give the values of the elements.
Solution:
(a) Deriving the equations of motion.

71
Figure 2.59: Non-linear resistance.
C 1x
1R
2x1i
2u
2i
2i22 ui
2i22 ui
221 uii
1i
1i
2x 0
12 xx
112 uxx
12 xx 212 vxx
2R
C
2v
L
i1 = G (u1 − x1)
i1 − i2 + u2 = Cd
dtx1
i2 = Cd
dtx2 = x3
v2 = r (i2)
0− x2 + x1 − v2 = Ld
dti2

72 CHAPTER 2. DYNAMIC MODELS
C úx1 = G (u1 − x1)− x3 + u2
C úx2 = x3
L úx3 = x1 − x2 − r (x3)
As C = L = 1,
úx1 = G (u1 − x1)− x3 + u2
úx2 = x3
úx3 = x1 − x2 − r (x3)
(b) Equilibrium state around u01 = 1, u
02 = 27.
0 = G¡u0
1 − x01
¢− x03 + u
02
= G¡1− x0
1
¢− x03 + 27
0 = x03
0 = x01 − x0
2 − r (0)
G¡1− x0
1
¢− x03 + 27 =
¡1− x0
1
¢3+ 27 = 0
x01 = 4
x02 = x0
1 − r (0) = 4− 2 = 2x0
3 = 0
x0 =£4 2 0
¤T
δ úx1 = G¡¡u0
1 + δu1
¢− ¡x01 + δx1
¢¢− ¡x03 + δx3
¢+¡u0
2 + δu2
¢= (−3 + δu1 − δx1)
3 − δx3 + 27 + δu2
∼= −27 + 3× 9 (δu1 − δx1)− δx3 + 27 + δu2
= −27δx1 − δx3 + 27δu1 + δu2
δ úx2 = x03 + δx3
= δx3
δ úx3 =¡x0
1 + δx1
¢− ¡x02 + δx2
¢− r ¡x03 + δx3
¢= 4 + δx1 − 2− δx2 − (δx3 + 2)
= δx1 − δx2 − δx3

73
(c) Circuit diagram
C 1x
271
1 R
2x1i
2u
2i
2i22 ui
2i22 ui
221 uii
1i
1i
2x 0
12 xx
112 uxx
12 xx 212 vxx
12 R
C
2v
L
L = 1H, R1 =1
27Ω, R2 = 1Ω.






![Improved Particle Swarm Optimization Based Hyper ...LR (2) Difference pattern, Diff ( ) R L R. R (3) where ( 1) [sin cos sin cos] /2 1 0 0 j n Kd N n R L I n e ( 1) [sin cos sin sin]](https://img.pdfslide.us/doc/110x75/6008e92652e2db232c051a89/improved-particle-swarm-optimization-based-hyper-lr-2-difference-pattern.jpg)


![Biomechanics...2019-11-16 - Anders Borgström Biomechanics for terrified L = v o 2 /g * cos ao o (sin ao o + √sin 2 ao o + [2gh o /v o 2]) +/- l](https://img.pdfslide.us/doc/110x75/5f627f40f9ecdc715f60005c/biomechanics-2019-11-16-anders-borgstrm-biomechanics-for-terrified-l-v.jpg)