Embed Size (px)
Citation preview

DYNAMIC MODELING AND ANALYSIS OF MULTI-STAGE PLANETARY GEARS COUPLEDWITH CENTRAL BEARINGS AND HOUSING
Zheng-Ming Xiao, Xing Wu and Qing ChenFaculty of Mechanical & Electrical Engineering, Kunming University of Science and Technology,
Kunming, Yunnan, P.R. ChinaE-mail: [email protected]; [email protected]
IMETI 2015, SM5002_SCINo. 16-CSME-66, E.I.C.3952
ABSTRACTThis paper proposes a coupling dynamic model for multi-stage planetary gears train (PGT) based on thegearing theory and Lagrange equation, which is developed by analyzing the displacement relationships ofgearing system and the influence of floating components. The time-varying mesh stiffness, bearings inhousing, and the torsional support stiffness of ring gears are also considered. This model has 26 degrees-of-freedom (DOF) and adopts three planar DOFs for each central component, mesh phasing relations amongplanetary gears, and the rotational DOF for the planets of each stage. The modified transverse-torsionalmodel is established in the rotating Cartesian coordinates by using the lumped-parameter method; thusthis model is more accurate than the purely torsional model for describing the physical dynamics. Theacceleration data is tested by using the scheme of a back-to-back power circulation set-up, and the vibrationproperties are also studied.
Keywords: multi-stage planetary gears; modified transverse-torsional model; time-varying stiffness; meshphase; dynamic response.
MODÉLISATION DYNAMIQUE ET ANALYSE DES ENGRENAGES PLANÉTAIRESMULTI-ÉTAGES COUPLÉS À DES PALIERS ET BOÎTIERS CENTRAUX
RÉSUMÉCet article propose un modèle de couplage dynamique des engrenages planétaires multi-étages basée surla théorie des engrenages et des équations de Lagrange, lesquels sont développés en analysant la relationde déplacement du système d’engrenage et l’influence des composants flottants. La rigidité du maillage entemps variable, les paliers dans les boîtiers, et la rigidité des supports de torsion des engrenages sont aussiconsidérés. Ce modèle comporte 26 degrés de liberté et admet trois degrés de liberté planétaire. Le modèlemodifié transversal et en torsion est établi dans les coordonnées cartésiennes rotatives en utilisant la méthodedes paramètres groupés. Ainsi ce modèle est plus précis que le modèle purement de torsion pour décrire lesdynamiques matérielles. Les données d’accélération sont testées en utilisant le schème de configuration del’énergie de circulation “back-to-back”, les caractéristiques de vibration sont aussi étudiées.
Mots-clés : train d’engrenage multi-étage; modèle transversal en torsion modifiée; rigidité en tempsvariable; phase de maillage; réponse dynamique.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1007

1. INTRODUCTION
Planetary gears are widely used in many applications due to their advantages over parallel shaft arrange-ments such as high power density, diminished bearing loads and large reduction in a small volume [1].Despite these distinguishing advantages, planetary gears noise and vibrations are also essential for their ap-plications. The planetary gears (especially in multi-stage systems) usually have more undesirable dynamicbehavior than simple gears because of the complex structure and severe conditions. The vibration leadsto increased dynamic load that accelerates damage of gears, bearings and other hardware. Kahraman [2]used a three-dimensional lumped model to simulate the dynamic behavior of a single-stage planetary geartrain. Velex [3] used a lumped modeling and a Ritz approach to examine the dynamic response induced bymesh parametric excitations. Lin and Parker [4–6] established a lumped parameter model that includes bothtransverse and torsional motions. The modal properties are obtained analytically, and the vibration modesare classified into rotational, translational, and planet modes. Ambarisha [7] developed a 2D finite elementmodel from a unique finite element-contact analysis solver, which is specialized for gear dynamics, andexamined the complex, nonlinear dynamic behavior of spur planetary gears. Guo [8] studied the nonlineartooth wedging behavior and its correlation with planet bearing forces. Kim [9] proposed a time-varyingdynamic model of the planetary gear, in which the pressure angles and contact ratios are varying due tothe bearing deformations. Wu and Parker [10, 11] analytically investigated the vibration of planetary gearswith equally and unequally spaced planets based on an elastic-discrete model, in which the ring gear wasmodeled as an elastic body and the remaining components were modeled as rigid bodies. The well-definedmodal properties were also characterized for all possible modes. Aski [12] presented a global optimizationmethod for planetary gear vibration reduction by means of tip relief profile modifications. However, mostof these planetary gear train dynamic models are limited to single-stage planetary gear sets. With respectto planetary gears, several lumped-parameter models and deformable gear models have been developed tostudy the gear dynamics, which mainly address the static analysis, natural frequencies and vibration modesto estimate dynamic forces and responses.
To satisfy the requirements of large torque and compactness, the planetary reducer undertakes high powerdensity. Compared with simple single-stage planetary gears, multi-stage planetary gears provide larger re-duction ratios and more flexible configurations, and thus are being widely studied in the high speed heavyload railway transportation field. Thus, the dynamic performance of the multi-stage planetary reducer re-mains as one of the major concerns considering its durability and reliability. Multi-stage planetary gearsmay have more noise and vibrations, which affect the dynamical performance [13]. Kahraman [14] con-ducted an analytical study of the vibration of compound planetary gears, where a purely rotational modelthat does not include the gear translation is applied to a restricted class of compound planetary gears. For thecompound planetary gears, recent studies focus on the natural frequencies, vibration modes, and dynamicresponses, where the most of these structures are based on the Ravigneaux’s planetary gear sets [15–18].Although there are many literatures on simple planetary gears, the vibration of complex multi-stage plan-etary gear sets has received few attentions. In general, the recent work only studied the gear train withoutthe housing of gearbox. However, the dynamic response of the gear train is the main source to excite thegearbox housing through the bearings and planets. To the best of our knowledge, only little work has beendone to characterize the dynamic response of the planetary gearbox. In particular, the lack of experimentalstudies, which address the complex dynamics of multi-stage planetary gears and the availability of analyticalmodel for gear dynamics, motivated the present study. It is known that an accurate analytical model includ-ing proper coupling relations and detailed characterization of the dynamics of planetary gears is neededto estimate relative vibration and predict dynamic forces in industrial applications. Therefore, this studyaims at presenting an analytical model for three-stage planetary gears coupled with the central bearings andhousing, computing the natural characteristic, and suggesting an approach to lucubrate the vibration cou-
1008 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

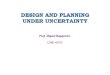
Fig. 1. Lumped parameter model of PGT.
pling between the gear train and the housing of the multi-stage planetary gearbox. In spite of the theoreticalanalysis, practical experiments are also carried out based on a multi-stage planetary gearbox to validate theefficacy of the proposed schemes.
2. DISPLACEMENT RELATIONSHIP OF COMPONENTS
This analysis deals with the planar vibration of single stage planetary gears. The sun, ring, carrier and Nplanets are treated as rigid bodies. The component bearings are modeled by linear springs. Gear mesh inter-actions are represented by springs acting along the line of action. There are two classical lumped- parametermodels for spur planetary gears, i.e., the purely torsional model and transverse-torsional model. The purelytorsional model includes N +3 DOFs which only considers the rotational DOF of each component. In thetransverse-torsional model, each component has three DOFs: two translations and one rotation.
For the multi-stage planetary gears, if the model uses three DOFs to express each component, it willbe difficult to analyze the dynamic properties. At the same time, the purely torsional model cannot fit thephysical behavior well since it may be too simple to investigate the coupling vibration of a multi-stageplanetary gearbox. Thus, in this paper, we propose a modified transverse-torsional model for the three-stage planetary gears, where the analytical model of planetary gears is shown in Fig. 1. The model admitsthree planar DOFs for each central components, and the rotational DOF for the planets of each stage. Themodel includes the gyroscopic effects induced by the carrier rotation, where the sun and carrier translationsxi,yi (i = s,c) are measured with respect to a rotating coordinates fixed to the carrier.
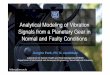
Figure 2 shows a sun-planet-ring mesh in the fixed coordinates oij and rotating coordinates oζη. Thepositions of sun and carrier can be described by the vector form as rs = xs i+ ysj and rc = xci+ ycj. Byusing the coordinate revolution transformation, the accelerations of the central components are given by
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1009

Fig. 2. A sun-planet-ring mesh.
rs = (xs−2ωcys−ω2cxs)i+ (ys+2ωcxs−ω2
sys)j
andrc = (xc−2ωcyc−ω2
cxc)i+ (yc+2ωcxc−ω2cyc)j
3. MODELING AND MOTION EQUATIONS
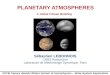
The multi-stage PGT dynamic model can be developed based on the single-stage PGT lumped parametermodel by considering the coupling relationships. The ring gear was mounted on the housing, so that theanalytical model includes the tangential support stiffness. The reducer is composed of a three-stage planetarygear as shown in Fig. 3. The following assumptions are made for the purpose of developing a dynamic modelof the three-stage PGT [2, 4]:
1. The gear wheels and the nut carrier are modeled by rigid bodies.
2. The gear tooth flexibilities are modeled as linear gear mesh springs.
3. Frictional forces arising from tooth sliding motions are negligible.
4. Clearances nonlinearity is negligible.
It is convenient to develop the multi-body dynamic model by using the energy methods. The kineticenergy term for each component in the drivetrain system is given by
T =∑
Tj =12
∑qjMj qj , Mj = [M
Ij ,M
IIj ,M
IIIj ]
T , qj = [uIj ,u
IIj ,u
IIIj ]
T (j,= c,r,s,1, . . . ,N)
where the superscripts I, II and III denote Stage 1, Stage 2, Stage 3 in the three-stage gears system. Thepotential energy of the gear system is contributed to the elastic deformation of flexible components includingthe gear mesh and ring gear support stiffness. For the gear mesh stiffness and the coupled stiffness between
1010 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

Fig. 3. Layout for three-stage PGT.
the adjacent two ring gears, the respective potential energy is given by each term on the right hand side ofthe following equation:
U =12
∑kmδ
2m, km = [k
Im,k
IIm,k
IIIm ]
T , δm = [δIm,δ
IIm,δ
IIIm ]
T (m= ri, si,e,r; i = 1, . . . ,N)
For a three-stage PGT (number of planets: 3, 4, 4), by considering the tangential support stiffness of ringgears and the bearings stiffness in housing, the Lagrange function is given as
L =12mIs((x
Is)
2+ (yI
s)2)+
12(I Is/(r
Is)
2)(uIs)
2+
12(I Ir/(r
Ir)
2)(uIr)
2+
12
∑(I Ip/(r
Ip)
2)(uIn)
2
+12
(mIc+
∑mIp+m
IIs
)((x1
c )2)+ (yI
c)2)+
12(I Ic/(r
Ic)
2+
∑mIp+ I
IIs /(r
Ic)
2)(uIc)
2
+12(I IIr /(r
IIr )
2)(uIIr )
2+
12
∑(I IIp /(r
IIp )
2)(uIIn )
2+
12
(mIIc +
∑mIIp+m
IIIs
)((xII
c )2+ (yII
c )2)
+12(I IIc /(r
IIc )
2+
∑mIIp+ I
IIIs /(r
IIc )
2)(uIIc )
2+
12(I IIIr /(r
IIIr )
2)(uIIIr )
2+
12
∑(I IIIp /(r
IIIp )
2)(uIIIn )
2
+12
(mIIIc +
∑mIIIp
)((xIII
c )2+ (yIII
c )2)+
12
(I IIIc /(r
IIIc )
2+
∑mIIIp
)(uIIIc )
2
−12
(∑kIsn(t)(δ
Isn)
2+
∑kIrn(t)(δ
Irn)
2(kIr(u
Ir)
2)−
12
(∑kIIsn(t)(δ
IIsn)
2+
∑kIIrn(t)(δ
IIrn)
2+kII
r (uIIr )
2)
−12
(∑kIIIsn(t)(δ
IIIsn)
2+
∑kIIIrn(t)(δ
IIIrn)
2+kIII
r (uIIIr )
2)−
12kIs((x
Is)
2+ (yI
s)2)−
12kIIIc ((x
IIIc )
2+ (yIII
c )2)
(1)
We also have the Lagrange equationd
dt
(∂L
∂qj
)−∂L
∂qj=Qj (2)
where L= T −U (T is the kinetic energy, U is the potential energy); qj = [uIj ,u
IIj ,u
IIIj ] (j = c,r,s,1, . . . ,N)
are the generalized coordinates; qj are the generalized velocities; Qj are the non-conservative forces (in-cluding the damping forces and external forces). Substituting Eq. (1) into Eq. (2) gives the following system
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1011

motion equations:
mIs(x
Is−2ωI
cyIs− (ω
Ic)
2xIs)−
∑kIsnδ
Isn sinψ I
sn+kIsx
Is =Q
Isx
mIs(y
Is+2ωI
cxIs− (ω
Ic)
2yIs)+
∑kIsnδ
Isn cosψ I
sn+kIsy
Is =Q
Isy
(I Is/r
Is)
2)uIs+
∑kIsnδ
Isn =Q
Ist
(I Ir/(r
Ir)
2)uIr +
∑(kIrn(t)δ
Irn)+k
Ir(u
Ir −u
IIr )=Q
Ir
(I Ip/(r
Ip)
2)uIn+k
Isnδ
Isn−k
Irnδ
Irn =Q
In (n= 1,2,3)(
mIc
∑mIp+m
IIs
)(xIc−2ωI
cyIc− (ω
Ic)
2xIc)+
∑kIsnδ
Isn sinψ I
sn+
∑kIrnδ
Irn sinψ I
sn
+
∑kIrnδ
Irn sinψ I
rn−
∑kIIsnδ
IIsn sinψ II
sn =QIcx(
mIc+
∑mIp+m
IIs
)(yIc+2ωI
cxIc− (ω
Ic)
2)yIc)−
∑kIsnδ
Isn cosψ I
sn
−
∑kIrnδ
Irn cosψ I
rn+
∑kIIsnδ
IIsn cosψ II
sn =QIcy
(I Ic/(r
Ic)
2)+∑
mIp+ I
IIs /(r
Ic)
2)uIc−
∑(kIsnδ
Isn cosαI
s+kIrnδ
Irn(r
IIs /r
Ic)=Q
Icr
(I IIr /(r
IIr )
2)uIIr +
∑(kIIrn(t)δ
IIrn)−k
Ir(u
Ir −u
IIr )+k
IIr (u
IIr −u
IIIr )=Q
IIr
(I IIp /(r
IIp )
2)uIIn +k
IIsnδ
IIsn−k
IIrnδ
IIrn =Q
IIn ( (n= 1,2,3,4)(
mIIc +
∑mIIp+m
IIIs
)(xIIc −2ωII
c yIIc − (ω
IIc )
2xIIc )+
∑kIIsnδ
IIsn sinψ II
sn
+
∑kIIrnδ
IIrn sinψ II
rn−
∑kIIIsnδ
IIIsn sinIII
sn =QIIcx(
mIIc +
∑mIIp+m
IIIs
)(yIIc +2ωII
c xIIc − (ω
IIc )
2yIIc )−
∑kIIsnδ
IIsn cosψ II
sn
−
∑kIIrnδ
IIrn cosψ II
rn+
∑kIIIsnδ
IIIsn cosψ III
sn =QIIcy
(I IIc /(r
IIc )
2+
∑mIIp+ I
IIIs /(r
IIc )
2)uIIc −
∑(kIIsnδ
IIsn cosαII
s +kIIrnδ
IIrn cosαII
r )+∑
kIIIsnδ
IIIsn(r
IIIs /r
IIIc )=Q
IIct
(I IIIr /(r
IIIr )
2)uIIIr +
∑(kIIIrn(t)δ
IIIrn)−k
IIr (u
IIr −u
IIIr )+k
IIIr u
IIIr =Q
IIIr
(I IIIp /(r
IIIp )
2)uIIIn +k
IIIsnδ
IIIsn−k
IIIrnδ
IIIrn =Q
IIIn (n= 1,2,3,4)(
mIIIc +
∑mIIIp
)(xIIIc −2ωIII
c yIIIc − (ω
IIIc )
2xIIIc )+
∑kIIIsnδ
IIIsn sinψ III
sn +
∑kIIIrnδ
IIIrn sinψ III
rn +kIIIc x
IIIc =Q
IIIcx(
mIIIc +
∑mIIIp
)(yIIIc +2ωIII
c xIIIc − (ω
IIIc )
2yIIIc )−
∑kIIIsnδ
IIIsn cosψ III
sn −
∑kIIIrnδ
IIIrn cosψ III
rn +kIIIc y
IIIc =Q
IIIcy
(I IIIc /(r
IIIc )
2+
∑mIIIp )u
IIIc −
∑(kIIIsnδ
IIIsn cosαIII
s +kIIIrnδ
IIIrn cosαIII
r )=QIIIct (3)
where Ii for i = s,p,c (s, p and c represent the sun, planet and carrier) are the moments of inertia; ri arethe base circle radii of the gears or radius of the carrier; mp is the mass of a planet; uj for j = s,c,1, . . . ,N(N indicates the number of planets) are the rotational deflections of bodies along the lines of action; xk, yk(k = s,c) are the sun and carrier translations; ksn, krn are the nth sun-planet and ring-planet mesh stiffness;
1012 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

ks , kc are the bearing stiffness of the sun and carrier; kr is the support stiffness of the ring gear; δsn, δrn arethe nth sun-planet and ring-planet relative displacement; ψn is the nth planet phase angle.
The parameter relationship can be confirmed by using the rotating Cartesian coordinates, and the rela-tional expressions are given as
δsn = (xc−xs)sinψsn+ (ys−yc)cosψsn+us−uc cosαs+un+ esn(t)
δrn = xc sinψrn−yc cosψrn+ur −uc cosαr −un+ ern(t)
xIIs = x
Ic,x
IIIs = x
IIIc ; yII
s = yIs,y
IIIs = y
IIc
uIIs = r
IIs u
Ic/r
Ic,u
IIIs = r
IIIs u
IIc /r
IIc ; ψsn = ψn−αs,ψrn = ψn+αr
where esn(t), ern(t) are the nth sun-planet and ring-planet transmission error. The differential equations ofmotion (3) can be rewritten in a matrix form as
Mq+Cq+K(t)(q+ e(t))= F (4)
where M, C and K(t) are the positive definite mass matrix, damping matrix and stiffness matrix, respectively.q, e(t) and F are the generalized coordinate vector, transmission error vector and system load vector. TheRayleigh damping model used here assumes that the damping is proportional to the mass and stiffness.
4. TIME-VARYING STIFFNESS ANALYSIS
Mesh phase between the planets is determined by considering the planet position angles and the numbersof teeth for the sun and ring. For a fixed ring gear, planet 1 completes Zr tooth meshes in one completerevolution of the carrier that brings planet 1 back to its initial location. Consequently, Fig. 1 shows that,when the carrier rotates an angle ψ , planet 1 is moved to the initial position of planet 2, and ψZr/2π toothmeshes are completed in this process. The planet mesh phase relationship is expressed as
γsn = ±ψnZs/2π
γrn = ±ψnZr/2π (5)
where γsn is the mesh phasing between the first and nth sun-planet meshes (γs1 = 0); γrn denotes the meshphasing between the first and nth ring-planet meshes (γr1 = 0). Zs , Zr are the numbers of teeth on thesun and ring gears, respectively. ψn is the circumferential angles of the nth planets, which is measured byreferencing to planet 1 (ψ1 = 0) along the positive counter-clockwise rotation. The sign of γsn, γrn dependson the direction of carrier rotation (the upper sign “+” is used for the counter-clockwise rotation, and thelower sign “–” is used for the clockwise rotation).
For continuous gear rotation, all gears meshing are periodic at the same mesh frequency ωm in a single-stage planetary gear. The mesh frequency for system with fixed ring is given as
ωm = ωsZsZr/(Zs+Zr)= ωcZr (6)
where ωs , ωc are the rotation frequency of the sun and carrier, respectively. For spur gears, the time-varying mesh stiffness is commonly approximated by a rectangular wave with a mesh period Tm = 2π/ωm.However, according to the characteristics of the time-varying mesh stiffness and the previous studies on theFE methods, a trapezoidal wave is more accurate to denote the time-varying mesh stiffness. If the planettooth number is even, the mesh phasing for the sun-planet and ring-planet are consistent. On the other hand,
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1013

Fig. 4. Modeling of mesh stiffness variations in the nth (a) sun-planet and (b) ring-planet meshes, εs , εr are contactratios.
there is a half mesh period for the mesh phase difference between the internal and external gearings whenthe planet tooth number is odd. The time-varying mesh stiffness for each planet is expressed as
ksn(t)= ks1(t−γsnTrn)
krn(t)= kr1(t−γrnTrn)= kr1(t− (γsn+γsr)Trn) (7)
where γsr is the phase difference between the sun-planet and ring-planet meshes for a given planet and it isthe same for each planet; γsr = 0 when the planet tooth number is even, and γsr = 0.5 when the planet toothnumber is odd.
When there are Pn tooth pairs in the contact for a gears mesh, the total mesh stiffness is kn =∑pn
p=1 kp,where kp are the mesh stiffness of tooth pair p. For the planetary gears, the mesh stiffness of the sun-planetand ring-planet are calculated by means of the FE static analysis, and their time-varying characteristics areshown in Fig. 4.
For mesh stiffness variation of sun-planet in Fig. 4(a), the first tooth pair engages from 0 (pitch point) to0.68 in a mesh period, and the stiffness slightly decreases during the recess. The second tooth pair engagesfrom 0.18 to 1, and the stiffness slightly increases during the approach. These two pairs of teeth share theload from 0.18 to 0.68, which are known as double-tooth contact, where the load gradually switches fromthe first pair to the second pair. Note that the first pair is also in contact from –0.82 to 0 in a previous meshcycle (not shown in Fig. 4), which is similar to the second pair contact from 0.18 to 1. The mesh stiffnessvariations of the sun-planet and ring-planet are similar; on the contrary, the contact ratios are different,εs = 1.5, εr = 1.63.
5. NATURAL FREQUENCIES AND VIBRATION MODES
To determine the natural frequencies and vibration modes, a time-invariant system is considered. All meshstiffness are considered to be constant and equal to their average stiffness over one mesh cycle. All thedamping are neglected, and here the ring gears are considered as rigid bodies. The eigenvalue problem forthe linear time-invariant case using the average mesh stiffness is given by
K0ϕi = ω2i Mϕi (8)
where K0 is the mean stiffness matrix, ωi are the natural frequencies, and ϕi are the associated vibrationshape vector. The parameters of the three-stage PGT are listed in Table 1. By solving the free vibrationeigenvalue problem, the natural frequencies are computed (as shown in Table 2), and the associated modeshapes can also be obtained.
1014 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

Table 1. Parameters of the three-stage planetary train.Parameter First stage Second stage Third stage
SunI PlanetI RingI SunII PlanetII RingII SunIII PlanetIII RingIII
Number of teeth 25 20 65 21 27 69 24 24 72Mesh stiff. (N/m) 3.8×108 5.4×108 7×108
Ring support stiff. (N/m) 1×109 1.2×109 1.5×109
Table 2. Natural frequencies of gear train (f /Hz).Vibration modes Natural frequenciesRigid-body mode f1 = 0Planet mode f13 = f14 = f15 = 2289, f20 = f21 = f22 = 3653, f24 = f25 = 4526Over all mode f2 = 265, f3 = f4 = 506, f5 = 616, f6 = f7 = 882, f8 = 925, f9 = 1096, f10 = f11 = 1208,
f12 = 1624, f16 = 2405, f17 = f18 = 2634, f19 = 2707, f23 = 3783, f26 = 5439
For three-stage planetary gears with fixed rings, all modes can be classified into one of the three categories:(a) a rigid-body mode; (b) three group of planet modes (degenerate modes) with multiplicity N − 1 (Nindicates the number of planets); (c) over all modes.
Rigid-body mode: Since the input and output members are not constrained, the stiffness matrix is semi-definite, which results in a “rigid body” mode at zero frequency. At this mode, all gears and carriers rotateas rigid bodies without any deflection according to the transmission ratio.
Planet modes: At these modes, only the planets of one stage rotate with respect to each other, and thevector sum of the deflections of planets is zero. For the planet mode at 4526 Hz, the vibration only existsin the first-stage. Similarly, the vibration only exists in the second-stage at 3653 Hz and the third-stage at2289 Hz.
Over all modes: The planets of each stage PGT move exactly the same way forming an axi-symmetricmode shape to generate the non-zero displacements of the input and output members. At these modes, it ischaracterized by the existence of vibrations of all PGT members in contribution to the overall motion.
6. DYNAMIC RESPONSES
According to the external excitation from a statistical load, the average load of the planetary gearbox is72 kNm, and the input speed is 565 rpm. For the 3-stage planetary gears of main reducer, by consideringthe internal excitation, the dynamic responses are simulated under this operating condition by the variablestep Runge–Kutta method.
Figure 5 shows the vibration displacements of each ring gear, the amplitude of which are 34 µ (stage1); 25 µm (stage 2); 18 µm (stage 3), and the corresponding peak-to-peak values are 65.6 µm (stage 1);51.8 µm (stage 2) and 39.2 µm (stage 3), respectively. The spectrum properties of ring gears vibration arealso analyzed. The frequency spectrum of vibration displacements are shown in Fig. 6. We can find thatthe main peak frequencies of each stage ring gear are 50 Hz (the mesh frequency of stage 2), 150 Hz (the 3times of mesh frequency of stage 2) and 170 Hz (the mesh frequency of stage 1).
7. EXPERIMENTAL STUDY OF MULTI-STAGE PLANETARY GEARS
7.1. Testing SchemeThe load motor cannot control and adjust the torque and speed effectively due to the lower output speedand large torque that are resulted from the large transmission ratio. Therefore, the measure solution for thethree-stage planetary gearbox is to use the “back-to-back” power circulation type arrangement. The “back-
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1015

Fig. 5. Vibration displacements of each ring gear.
Fig. 6. Frequencies spectrum of vibration displacement of ring gears.
Fig. 7. Accelerometers location.
Fig. 8. Vibration displacements of each ring gears (experimental value).
to-back” test fixtures of the planetary gearbox are composed of a driving motor, a torque-speed sensor, a testgearbox, a slave gearbox, and a DC generator.
The accelerometers configurations are shown in Fig. 7. The measuring points 1–6 are the preeminentvibration positions, including the input bearing, ring gear of stage 1, ring gear of stage 2, ring gear of stage3, output bearing, and the support in turn.
7.2. Experimental ResultsThe vibration accelerations of each measuring points are obtained through the accelerometers, and the vi-bration displacements and velocities can be calculated by numerical integral operations. Figure 8 shows the
1016 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

Fig. 9. Frequencies spectrum of vibration displacement of ring gears (experimental value).
Table 3. The theoretical and testing value of ring gears vibration.Vibration value Stage 1 Stage 2 Stage 3Vibration disp. Theoretical 65.6 51.8 39.2Peak-to-Peak (µm) Test 81.3 65 49.6Vibration velocities Theoretical 8.6 7.8 4.5RMS (mm·s−1) Test 6 4.9 3.6
ring gears’ vibration displacements, and the frequencies spectrum of vibration displacements are given inFig. 9.
Table 3 provides the statistical and analytical results about the measured data. Theoretical analysis andexperimental tests show that the ring gears vibration displacement and velocity are similar, and the mainfrequencies of theoretical value coincides with the test data well.
8. CONCLUSIONS
Trapezoid waves are used to express the time-varying mesh stiffness, and the supported stiffness is obtainedby the FE method. The mesh phasing relations among planetary gears are analyzed, and then the inner ex-citations and dynamic parameters of multi-stage planetary gears are analyzed and calculated systematically.Based on the gearing theory and Lagrange equation, we considered the bearings in housing and the torsionalsupport stiffness of ring gears, and then established a modified transverse-torsional model of multi-stageplanetary gears train by using the lumped-parameter method.
The modal properties are obtained analytically, and the vibration modes are classified into rigid-bodymode, overall modes and planet modes. According to the internal excitation and the external load from astatistical operating condition, the dynamic responses are simulated by numerical methods. Compared withthe experimental data and the results from purely torsional model, this dynamic model with 26 DOFs ismore accurate and can match the physical behavior better than the purely torsional model.
For a three-stage planetary gearbox with the large speed ratio, the experiment based on a back-to-backpower circulation set-up is studied. The ring gear responses from the theoretical and experimental methodare compared. The experimental results fit well the theoretical analysis, which validate the reliability andvalidity of the modified transverse-torsional model for multi-stage PGT-housing. This work suggests afeasible method for lucubrating the vibration transfer and acoustic coupling of the planetary gearbox, andadvances the understanding of multi-stage planetary gears dynamics.
ACKNOWLEDGEMENT
This project was supported by the National Science Foundation of China (No. 51465021), the NationalScience Foundation of Yunnan Province (No. 2013FB014), and the Educational Commission of YunnanProvince (Key Program No. 2013Z124 & Major Program No. ZD2013004).
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 1017

REFERENCES
1. Smith, J.D., Gears and Their Vibration, Marcel Dekker, 2003.2. Kahraman, A., “Planetary gear train dynamics”, ASME Journal of Mechanical Design, Vol. 116, No. 9, pp.
714–720, 1994.3. Velex, P. and Flamand, L., “Dynamic response of planetary trains to mesh parametric excitations”, ASME Journal
of Mechanical Design, Vol. 118, No. 1, pp. 7–14, 1996.4. Lin, J. and Parker, R.G., “Analytical characterization of the unique properties of planetary gear free vibration”,
ASME Journal of Vibration and Acoustics, Vol. 121, No. 3, pp. 316–321, 1999.5. Lin, J. and Parker, R.G., “Sensitivity of planetary gear natural frequencies and vibration modes to model param-
eters”, Journal of Sound and Vibration, Vol. 228, No. 1, pp. 109–128, 1999.6. Parker, R.G., “A physical explanation for the effectiveness of planet phasing to suppress planetary gear vibra-
tion”, Journal of Sound and Vibration, Vol. 236, No. 4, pp. 561–573, 2000.7. Ambarisha, V.K. and Parker, R.G., “Nonlinear dynamics of planetary gears using analytical and finite element
models”, Journal of Sound and Vibration, Vol. 302, No. 3, pp. 577–595, 2007.8. Guo, Y. and Parker, R.G., “Dynamic modeling and analysis of a spur planetary gear involving tooth wedging
and bearing clearance nonlinearity”, European Journal of Mechanics – A/Solids, Vol. 29, No. 6, pp. 1022–1033,2010.
9. Kim, W., Lee, J.Y. and Chung, J., “Dynamic analysis for a planetary gear with time-varying pressure angles andcontact ratios”, Journal of Sound and Vibration, Vol. 331, pp. 883–901, 2012.
10. Wu, X. and Parker, R.G., “Modal properties of planetary gears with an elastic continuum ring gear”, ASMEJournal of Applied Mechanics, Vol. 75, No. 5, pp. 031014, 2008.
11. Parker, R.G. and Wu, X., “Vibration modes of planetary gears with unequally spaced planets and an elastic ringgear”, Journal of Sound and Vibration, Vol. 329, pp. 2265–2275, 2010.
12. Aski, F.S., Mirparizi, M., Samani, F.S. and Hajabasi, M.A., “Vibration behavior optimization of planetary gearsets”, Propulsion and Power Research, Vol. 3, No. 4, pp. 196–206, 2014.
13. Inalpolat, M. and Kahraman, A, “Dynamic modeling of planetary gears of automatic transmission”, Proc.IMechE, Part K: J. Multi-Body Dynamics, Vol. 222, No. 3, pp. 229–242, 2008.
14. Kahraman, A., “Free torsional vibration characteristics of compound planetary gear sets”, Mechanism and Ma-chine Theory, Vol. 36, pp. 953–957, 2001.
15. Kiracofe, D.R. and Parker, R.G., “Structured vibration modes of general compound planetary gear systems”,ASME Journal of Vibration and Acoustics, Vol. 129, pp. 1–16, 2007.
16. Al-shyyab, A. and Alwidyan, K., Jawarneh, A. et al., “Non-linear dynamic behaviour of compound planetarygear trains: model formulation and semi-analytical solution”, in Proc. IMechE, Part K: J. Multi-Body Dynamics,Vol. 223, pp. 1–11, 2009.
17. Guo, Y. and Parker, R.G., “Purely rotational model and vibration modes of compound planetary gears”, Mecha-nism and Machine Theory, Vol. 45, pp. 365–377, 2010.
18. Guo, Y. and Parker, R.G., “Analytical determination of mesh phase relations in general compound planetarygears”, Mechanism and Machine Theory, Vol. 46, pp. 1869–1887, 2011.
1018 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016





![Modelling and Analysis of 2-Stage Planetary Gear Train for ...tooth. Pawar and Kulkarni [6] designed a two-stage planetary gear train for high reduction ratio. Reduction ratio of 78:1](https://img.pdfslide.us/doc/110x75/604484e6c767f5339c757fba/modelling-and-analysis-of-2-stage-planetary-gear-train-for-tooth-pawar-and.jpg)