Embed Size (px)
Citation preview

8th GRACM International Congress on Computational Mechanics Volos, 12 July – 15 July 2015
DYNAMIC FRICTION COEFFICIENT OF METALLIC FRACTURE INTERFACES WITH FRACTAL GEOMETRY
Olympia K. Panagouli and Konstantina Mastrodimou
Laboratory of structural analysis and design, Department of Civil Engineering,
University of Thessaly, Volos, GR-38334, Greece e-mail: [email protected] ; web page: http: http://lsad.civ.uth.gr/
Keywords: Dynamic friction coefficient, resolution, roughness, size effects, fractal geometry.
Abstract In this paper the friction mechanism that is developed between metallic fracture interfaces with irregularities of different scales, submitted to dynamic excitations is studied. The main purpose of the paper is to
investigate how the resolution n , which takes into account asperities of different scales of the fracture
interfaces and the intensity of the excitation, affect the friction that develops between the two surfaces. Friction is assumed to be the result of gradual plastification of the interface asperities in a metallic fractured body with elastic-plastic behaviour. The fracture interface of the body is described by a fractal interpolation function f with iterative regular construction, which permits the analysis of interfaces with irregularities of different scales. In the sequel, the structures resulting from the different iterations (i.e. resolutions) of the fracture interface are submitted to different acceleration histories that induce forces leading to plastification of the interface asperities. The dynamic friction coefficient is studied macroscopically, as the ratio between the forces that develop parallel and normal to the interface. Finally, the influence of the applied normal loading to the friction mechanism is investigated with respect to the fractal resolution and the acceleration history of the interfaces.
1. INTRODUCTION A good understanding of tribological process at different normal forces and length scales is essential for
improving efficiency in many applications. There is a gamut of engineering materials like metals, ceramics, polymers and composite materials used in many applications where friction challenges both efficiency and reliability. The common method for calculating the static friction force (Coulomb friction law) was based on the assumption that the friction force is independent of the nominal contact area and it results by multiplication of the normal applied load by a constant, known as the static friction coefficient. Static friction coefficient was taken as a function of the contacting materials for at least 300 years[1]. However, the values of the static friction coefficient resulting from the above assumptions represent average coefficients of friction, because the friction coefficient is presently recognized as both material and system dependent [2] and is definitely not an instinct property of two contacting materials. More specifically Blau [2] indicated that the friction coefficient is a misunderstood quantity in the field of science and engineering, due to the fact that the fundamental origins of sliding resistance are not so clear, and hence, it is very important to understand the tribological process.
Tabor in his general work of friction understanding [3] pointed out three basic elements that are involved in the friction of dry solids:
The true contact area between rough surfaces. The type and strength of bond formed at the interfaces where contact occurs. The way in which the material around the contacting areas is sheared and ruptured during sliding.
Chang et al. [4] presented a model (CEB friction model) for predicting static friction coefficient of rough metallic interfaces based on the three elements indicated by Tabor [3]. This model uses a statistical representation of surface roughness [5] and calculates the static friction force that is required to fail all of the contacting asperities, taking into account the normal loading. This approach demonstrated that the classical Coulomb friction law is a limiting case of a more general behaviour where static friction coefficient decreases with increasing applied load or decreasing nominal contact area. This friction model underestimates friction coefficient values in the case of contact of rough surfaces since it neglects the ability of elastic-plastic deformed asperity to resist additional loading before failure, as it was demonstrated by Kogut and Etsion [6]. More specifically, the approximate models for the calculation of static friction coefficient presented by Chang et al. [4] assume failure of contacting asperity at the time the first plastic point appears and hence, underestimate the friction coefficient. The model presented later by Kogut and Etsion [7] with the assumption of elastic perfectly-plastic material behaviour, demonstrates a strong effect of the external force and nominal contact area on the

Olympia K. Panagouli and Konstantina Mastrodimou.
static friction. It was also demonstrated that this assumption may be invalid in cases where the contact approaches fully plastic state where small static friction was found. The numerical model presented by Panagouli and Iodranidou [8] relates the interface roughness both with the resolution and the fractal dimension of fracture interfaces which are described by fractal geometry. The model considers strain hardening effects and the friction mechanism is assumed to be the result of the interlocking mechanism developed between the interfaces and the gradual plastification of the interface asperities. This model also demonstrates a strong effect of the external load and roughness on the apparent friction coefficient.
In this paper the friction mechanism developed between metallic fracture interfaces with irregularities of different scales, submitted to dynamic excitations is studied. The main purpose of the paper is to investigate how
the resolution n , which takes into account asperities of different scales of the fracture interfaces, the intensity of
the excitation and the applied normal loading affect the friction that develops between the two interfaces of a body with elastic-plastic behaviour. The fracture interface of the body is a computer generated self affine curve f with an iterative regular construction which permits us to analyse pre-fractals of arbitrary generation and
therefore of arbitrary resolution n . Every structure resulting from each resolution of the interface is submitted
to a constant normal loading and to different acceleration histories in order to induce forces leading to the plastification of the interface asperities. The resulting contact problems are solved by using the F.E. code MSC-MARC and the dynamic friction coefficient is studied macroscopically.
2. SELF AFFINITY FOR THE MODELLING OF ROUGHNESS Experimental studies have shown that the true contact area between rough surfaces depends strongly on the
surface parameters used for the modelling of the geometry of interfaces, which in many cases is too complicated to be described by a few parameters. To overcome problems resulting from traditional approaches based on scale-dependent statistical surface parameters and to model real surfaces demonstrating multi-scale roughness, in contact mechanics studies of rough surfaces, fractal geometry is used in many cases in order to describe surface topography [9]-[15].
The Hausdorff dimension [16] which is used for the characterization of a set as a fractal one, has no application to the curves originated in mechanics. For that, other methods, based on experimental or numerical calculations, have been developed for the estimation of the fractal dimension of a curve, a parameter which is of great importance because of its scale-independent character. One of the most useful methods in this category, is the Richardson method, described in [17], which uses dividers set to a prescribed opening . Moving with these dividers along the curve so that each new step starts where the previous step leaves off, the number of steps ( )N is obtained. The curve is said to be of fractal nature if, by repeating this procedure for different
values of , the relation
( ) ~ DN (1)
is obtained in some interval * *. The power D denotes the fractal dimension of the profile, which is in the range 1 2.D The relation between the fractal dimension D of this profile and the dimension sD of the
corresponding surface is 1sD D .
Typically, such a profile can be measured by taking height data iy with respect to an arbitrary datum at
N equidistant discrete points ix and following the procedure presented in Goerke and Willner [18]. Here,
fractal interpolation functions are used for the passage from this discrete set of data , , 0,1,2,...,i ix y i N to a
continuous model, where ,i if x y 0,1,..., .i N It has been proved [19] that there is a sequence of
functions 1n nf x Tf x ,where
1 11 ( )( ) ( ) ( )n n i i i n i if x Tf x c l x d f l x g (2)
for 1[ , ], 1, 2,..., .i ix x x i N The operator T converges to a fractal curve f , as n . The transformation il
transforms 0[ , ]Nx x to 1[ , ]i ix x and it is defined by the relation
( ) .i i il x a x b (3)

Olympia K. Panagouli and Konstantina Mastrodimou.
The factors id are the hidden variables of the transformations and they have to satisfy 0 1id in order for 0 0:T C C to have a unique fixed point. Moreover, the remaining parameters are given by the following
equations:
1 0/i i i Na x x x x (4)
1 0 0 0/ /i i i N i N Nc y y x x d y y x x (5)
1 0 0/i N i i Nb x x x x x x (6)
1 0 0 0 0 0/ / .i N i i N i N N Ng x y x y x x d x y x y x x (7)
The fractal interpolation functions give profiles which look quite attractive from the viewpoint of a graphic roughness simulation. In higher iterations these profiles appear rougher because irregularities of new scales are taken into account. It must be mentioned here that an important advantage of the fractal interpolation functions is that their fractal dimension can be obtained numerically [19] and is given by the relation:
1 1
1 1
| | | | 1.N N
D D D Di i i i
i i
d a d a
(8)
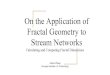
3. DESCRIPTION OF THE CONSIDERED PROBLEM The problem treated here is presented in Figure 1. It consists of two disks which are divided by a rough interface. Unilateral contact with friction conditions are assumed to hold at the interface, which is assumed to be the graph of a fractal interpolation function f interpolating the given set of data:
0.0,0.0 , 0.04,0.005 , 0.08, 0.005 , 0.12,0.0 . The free parameters have been chosen to have the values
1 2 3 0.365d d d so that the dimension of the interface have the value 1.058D which is suitable for
metallic fracture surfaces considering asperities of the scales studied here [20]. In the sequel, the iterations 1,2,n of the fractal interpolation function f are obtained by using the iterative scheme presented in the
previous section. It must be mentioned here that six approximations are taken into account, in order to study the influence of the resolution of the fractal interface to the friction mechanism for the scales studied here.
Figure 1: a) The considered problem (dimension in mm) b)The adopted stress-strain relationship
As it is shown in Figure 1a, every structure is separated by the interface into two parts, which are made of steel with modulus of elasticity 210E GPa and Poisson ratio ν=0.3. Inelastic material behaviour is considered and the uniaxial stress-strain law of Figure 1b is assumed to hold. The thickness of the two parts is taken equal to t 10mm and plane stress conditions are assumed to hold. The vertical displacements at the boundary nodes of the lower part are fixed, whereas the applied horizontal displacements are given in Figure 2a. These horizontal displacements give the sinusoidal acceleration history given in Figure 2b where the maximum value of the
excitation is 21 / secm . The acceleration history of Figure 2b is multiplied by a factor which is the basic parameter of the problem. The uniform normal loading applied on the upper part is denoted by vP . For ,vP six

Olympia K. Panagouli and Konstantina Mastrodimou.
cases are considered by varying its magnitude so that it produces a normal stress equal to 0.3 ,yf 0.4 yf , 0.5 yf ,
0.6 ,yf 0.7 ,yf and 0.8 ,yf respectively.
Figure 2: a) The applied horizontal displacements b) The applied horizontal accelerations
As it has already been mentioned in the previous section, fractal interpolation functions are adopted for the simulation of the interface geometry. The computer generated interfaces , 1, 2,...nf n are characterized by a
precise value of the resolution n of the interface. The resolution n is related to the ( )-thn iteration of the
fractal interpolation function and represents the horizontal projection of the basic linear size of the interface. As it is shown in Table 1, where the characteristics of the second to sixth iterations of the fractal interfaces are presented, the resolution of the interface changes rapidly when higher order iterations are taken into account. Taking into account the scales studied here in conjunction with the work of [9] where is pointed out that the roughness of cracked surfaces in metals develops fractal characteristics for at least three orders of magnitude, six approximations are used for the simulation of the roughness interface. It is important to mention here that the opposite sides of the fracture is assumed to be perfectly matching surfaces, so only one side of the fracture was generated by using the described procedure.
Iteration
Resolution (horizontal
projection) ( )n (mm)
Length(mm)
Number of finite
elements
2nd 13.333 123.98 19686 3rd 4.444 126.47 21158 4th 1.481 129.18 22340 5th 0.494 132.37 23592 6th 0.160 135.98 27201
Table 1: Characteristics of the considered structures
At the interfaces, unilateral contact with friction conditions are assumed to hold. The inherent coefficient of static friction for the material is taken to be equal to 0.1. At each scale, a contact problem is solved by using the F.E. code MSC-MARC. Figure 4 depicts four of the six different structures considered here. In order to have results which are not influenced by the discretization [21] the F.E. density is exactly the same for all the considered structures. For that, the linear boundaries were first divided into equal parts. The boundaries simulating the fractal curves were divided into segments having more or less equal lengths, of the order of 0.08mm. Notice that this length is about the half of the fundamental length 6 of the finest resolution. In this
way, it was ensured that in the finest resolution, each segment of the boundaries simulating the fractal curves will be divided into at least two finite elements, providing sufficient accuracy to the calculations. Details on the applied discretization are given in Table 1, whereas details of the discretized structures in the neighbourhood of the interface are presented in Figure 5. Concluding, the parameters considered here are the following: The interface resolution n : six (6) different cases are considered.
The value of the normal loading applied on the upper disk, vP : Six (6) cases are considered with values
0.3 ,yf 0.4 yf , 0.5 yf , 0.6 yf , 0.7 yf and 0.8 yf .

Olympia K. Panagouli and Konstantina Mastrodimou.
The value of the horizontal excitation. The combination of the first two parameters leads to 36 different problems. Each of these problems is solved for different values of the horizontal excitation until complete plastification of the asperities of the interface.
Figure 4: The analysed structures corresponding to third, fourth, fifth and sixth iteration of the interface
Figure 5: Details of the discretization in the neighbourhood of the interfaces for the structures of Figure 4
4. MULTIRESOLUTION ANALYSIS
The aim here is the study of the apparent dynamic friction coefficient for each one of the problems corresponding to the combination of the considered parameters, as presented in Section 3. At the beginning, our interest is focused on the values of the horizontal acceleration which lead to the plastification of the asperities of the interface. For that the acceleration history of Figure 2b is multiplied by a factor .
Figure 6: Size scale effects on the acceleration for different resolutions of the interface and different normal
loading.

Olympia K. Panagouli and Konstantina Mastrodimou.
Figure 6 depicts the change of the values of with respect to the uniform normal loading for different resolutions n of the interface. It is noticed that the values of the factor become bigger as we go to higher
resolution structures. In all the cases it is noticed that for the two higher resolutions 5 6, , significantly higher
horizontal accelerations appear leading to higher horizontal forces.
Figure 7: Variations of the horizontal forces with respect to the time considering different resolution, for normal pressure 0.3 ,yf
0.5 yf and 0.7 yf
Figure 7 depicts the changes of the horizontal forces with respect to the time for different resolutions n of
the interface and for different values of the normal loading ( 0.3 ,yf 0.5 yf and 0.7 yf respectively). It is noticed

Olympia K. Panagouli and Konstantina Mastrodimou.
that as the resolution increases all the structures indicate a stronger behaviour. It is also noticed that for the higher resolutions 5 6, , there is a significant increase of the horizontal forces in all the cycles of the dynamic
excitation. Figure 8 shows in magnification the change of the horizontal forces with respect to the time for the different resolutions of the interface and for two different normal loading cases. It is important to mention here that for the lowest resolution, the diagrams present a plateau when the excitation takes its larger values even in the cases the normal loading is rather small. Structures with higher interface resolutions present the same behaviour when the normal loading takes larger values. This means that at the lowest interface resolution ( 2 ), a
rather small interface sliding resistance appears, on the contrary to the higher resolutions which present a great interface sliding resistance as a result of the interlocking of their asperities.
Figure 8: Details of the variations of the horizontal forces for normal pressure 0.3 yf and 0.5 yf
a)
b)
Figure 9: Variations of the horizontal forces with respect to the time considering different values of normal pressure, for fourth and fifth resolutions of the interface.

Olympia K. Panagouli and Konstantina Mastrodimou.
c)
Figure 9 (cont.): Variations of the horizontal forces with respect to the time considering different values of normal pressure, for the sixth resolution of the interface
The differences of the obtained responses are more clear in the diagrams of Figure 9 which compares the
change of the horizontal forces with respect to the time for the different cases of the normal loading and for the fourth to the sixth resolutions of the interface. As it was expected, for every resolution of the interface, the horizontal forces increase with increasing vertical loading.
As the applied normal loading is constant for each case treated here, the apparent dynamic friction coefficient can be calculated by using the formula
max
,x
y
F
F
(9)
where max xF is the maximum value of the sum of the horizontal forces applied on the lower part of the
structure and yF is the sum of the normal forces applied on the upper part of it.. Here, it should be clarified
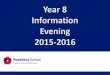
that the above convention regarding the maximum calculated value of the total horizontal forces has to be done due to the fact that the horizontal forces are not constant in all the considered cases, but their values vary depending on the time. In order to examine the size-scale effects on the friction coefficient, the variation of the apparent dynamic friction coefficient with respect to the characteristic linear size n (in logarithmic scale)
for different values of normal loading, is given in Figure 10. It is noticed that the apparent dynamic friction coefficient increases with the resolution. This is due to the fact that, as higher resolutions are taken into account, more asperities of different scales are considered, thus increasing the resistance developed by the interlocking between the two parts of the interface. This observation is verified by Figure 11 which shows the plastic strains developed at the interface for different values of the vertical loading, when the horizontal forces take their max values. Moreover, it is noticed that the friction coefficient decreases as the value of the normal loading increases, fact which is connected with the stronger plastification of the asperities.
Figure 10: Size scale effects on the dynamic friction coefficient for different resolutions of the interface and
different normal loading.

Olympia K. Panagouli and Konstantina Mastrodimou.
a) Second resolution of the interface
b) Third resolution of the interface
c) Fourth resolution of the interface
d) Fifth resolution of the interface
e) Sixth resolution of the interface
Figure 11: Plastic strains for every resolution of the interface and for normal pressure 0.6 yf at the time steps
1 2.96 ,t s 2 4.24t s and 3 5.52t s
5. CONCLUSIONS
The paper deals with the evolution of friction between two metallic fracture interfaces with irregularities of different scales subjected to dynamic excitations. The attention has been concentrated on the investigation of the effect of the resolution of the interfaces on friction in conjunction with the effect of the values of normal loading applied on the interface. The problem is formulated numerically within the context of the F.E. method, using a nonlinear material law. Moreover, unilateral contact and friction phenomena are accurately taken into account. The following conclusions may be traced:
The intensity of the excitation which leads to the plastification of the asperities of the interface increases as we go to higher resolutions of the interface.
The apparent dynamic friction coefficient increases with the resolution of the interfaces. This is due to the
fact that as the resolution increases, the interfaces become rougher because asperities of different scales are taken into account and therefore the interface sliding resistance increases. This is also the reason for which the maximum values of the horizontal forces, which are higher in finer resolutions, appear to have almost the same values in all the cycles of the dynamic excitation.
The study of the effect of the normal loading shows that dynamic friction forces increase with increasing normal loading for all scales studied here. However, in contrast to the behaviour of the dynamic friction forces, increasing normal loading decreases the dynamic friction coefficient, a fact which is connected with the plastification of the asperities. More specifically, as the normal loading increases, the plastification of the asperities becomes stronger and, consequently, the interface sliding resistance decreases. The influence of normal loading on the apparent dynamic friction coefficient is stronger in higher resolutions of interfaces.
The above results show that both parameters, resolution and normal loading have an important impact on the apparent dynamic friction coefficient for the scale ranges studied here. This fact leads to the conclusion that the apparent dynamic friction coefficient in elastic-plastic metallic fracture interfaces cannot be considered as a scale independent mechanical property.

Olympia K. Panagouli and Konstantina Mastrodimou.
REFERENCES
[1] Dowson, D., (1979), History of Tribology, Longman Inc., New York. [2] Blau, P. J., (2001), “The significance and use of the friction coefficient,” Tribol. Int., Vol. 34, pp. 585-
591. [3] Tabor, D., (1981), “Friction-The Present State of our understanding,” ASME, J. Lubr. Technol., Vol.
103, pp. 169-179. [4] Chang, W. R., Etsion, I., Bogy, D.B., (1988), “Static friction coefficient model for metallic rough
surfaces,” ASME, J. Tribol., Vol. 110, pp. 57-63. [5] Greenwood, J.A., Williamson, J.B., (1966), “Contact of nominally flat surfaces,” Proc. R. Soc. London,
Ser. A., Vol. 295, pp. 300-319. [6] Kogut, L., Etsion, I., (2003), “A semi-analytical solution for the sliding inception of a spherical
contact,” ASME J. Tribol., Vol. 125, pp. 499-506. [7] Kogut, L., Etsion, I., (2004), “A static friction model for elastic plastic contacting rough surfaces,”
ASME J. Tribol., Vol. 126, pp. 34-40. [8] Panagouli, O.K., Iordanidou, K., (2013), “Dependence of friction coefficient on the resolution and
fractal dimension of metallic fracture surfaces,” Int. J. Solids and Structures, Vol. 50, pp. 3106-3118. [9] Mandelbrot, B., Passoja, D., Paullay, A., (1984), “Fractal character of fractured surfaces of metals,”
Nature, Vol. 308, pp. 721-723.
[10] Majumdar, A., Tien, C.L., (1990), “Fractal characterization and simulation of rough surfaces,” Wear, Vol. 136, pp. 313- 327.
[11] Majumdar, A., Buhushan, B., (1990), “Role of fractal geometry in roughness characterization and contact mechanics of surfaces,” Trans ASME J. Tribology, Vol. 112, pp. 205-216.
[12] Majumdar, A., Buhushan, B., (1991), “Fractal model of elastic-plastic contact between rough surfaces,” J. Tribology, pp. 113, 1-11.
[13] Panagiotopoulos, P.D., Panagouli, O.K., Mistakidis, E.S., (1994), “Fractal geometry in structures. Numerical methods for convex energy problems,” Int. J. Solids Struct., Vol. 31, pp. 2211-2228.
[14] Panagouli, O.K., (1997), “On the Fractal Nature of Problems in Mechanics,” Chaos Solitons and Fractals, Vol. 8(2), pp. 287-301.
[15] Panagouli, O.K., Mistakidis E.S., (2011), “Dependence of contact area on the resolution of fractal interfaces in elastic and inelastic problems,” Engineering Computations, Vol. 28(6), pp. 717-746.
[16] Falconer, K.J., (1985), The Geometry of Fractal Sets, Cambridge Press, Cambridge University. [17] Mandelbrot, B., (1982), The Fractal Geometry of Nature, W.H. Freemann & Company, New York. [18] Goerke, D., Willner, K., (2008), “Normal contact of fractal surfaces- Experimental and numerical
investigations,” Wear, Vol. 264, pp. 589-598. [19] Barnsley, M., (1988), Fractals Everywhere, Academic Press, Boston- New York. [20] Kotowski, P., (2006), “ Fractal dimension of metallic fracture surface,” Int. J. Fracture, Vol. 141, pp.
269-286.
[21] Hu, G.D., Panagiotopoulos, P.D., Panagouli, O., Scher, O., Wriggers, P., (2000), “Adaptive finite element analysis of fractal interfaces in contact problems,” Comp. Methods Appl. Mech. Engrg., Vol. 182, pp. 17-37.