-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
1/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
1
Dynamic analysis of rolling bearing system using Lagrangian
model Vs. FEM code
H. Rubio* J. C. Garca Prada C. Castejn E. LaniadoUniversity
Carlos III University Carlos III University Carlos III University
Carlos III
Madrid, Spain Madrid, Spain Madrid, Spain Madrid, Spain
Abstract The rolling bearings dynamical behaviour
analysis is a critical condition to determine the machine
vibration response. The rolling bearing, with outer ring fixed,
is
a multibody mechanical system with rolling elements that
transmit motion and load from the inner raceway to the outer
raceway.In rolling bearing analytical formulation, the contact
between
rolling element and raceways is considered as nonlinear
springs
and their stiffness are obtained by using Hertzian elastic
contact
deformation theory. The contact model among the rolling
element and the raceways will be detailed in the paper due to
the
great important in the vibration pattern analysis .
In the work presented, the simulation of kinematics, dynamic
and
structural behaviours of the rolling bearings and their
vibration
response without faults will be presented, a analytical
model
using Lagrange formulation and a simulation model using
Algor
code (events simulation).
To evaluate the suitability and compatibility among
analytical
and simulation models, the results from simulation will be
applied to inner ring motion equations of analytical model
to
obtain a valuable error signal.
Keywords: Rolling bearing, analytical model, simulation,
multibody and rotor dynamics
I. Introduction
The rolling bearing dynamic behaviour analysis is avery
important issue to know the system vibrationresponse. This response
is non-linear, mainly when therolling element is a rolling element1
[4, 5]. On condition
operating, rolling bearings generate some vibrations andnoise
related to the movement transmission characteristicof these
mechanical elements where elastic propertieshave a great
influence.
In this work, in a first step, an analytical model isproposed by
using Lagrange formulation [9, 10] besides a3D rolling bearing
simulation model is developed. Also,
the vibratory signal, obtained from rolling bearingoperation by
means of a simulation program (Algor
code), using the "event simulation" technique [1, 12], is
*E-mail: [email protected]
E-mail: [email protected]
E-mail: [email protected] Roller and ball
implemented as input data (rolling element position, inner
race position, contact displacement) solution in theanalytical
model.
The main goal of this work will consist ofcharacterizing the
error signal in the inner ring motionequations.
II. Analytical model
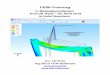
Figure 1 shows the multibody mechanical system tosimulate: the
configuration of a motor connected to arolling bearing, where the
outer race is fixed.
Fig. 1. Multibody mechanical system
In rolling bearings, the rolling element-racewaycontact is
non-linear, it makes that the faults in the
raceways or the rolling elements origin complexvibrations. For
this, in the analytical model presentedLagrange formulation is
applied to calculate the innerraceway and rolling elements
positions (independent
generalized coordinates) [10].The motor-rolling bearing system
motion equationswill be calculated using:
d T T V F
dt p p p
+ =
(1)
where p is generalized coordinate vector, F is
generalized loads (forces), T is total kinetic energyand V is
the total potential energy.
The coordinates used in the analytical model arereferenced to
the fixed outer race. Figure 2 shows theequivalent geometric model
used: rolling element centrepositions and the inner centre position
related to the outer
centre position.
-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
2/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
2
Also, figure 2 describes the non-linear contact
rollingelement-raceways. The kinetic and potential energieswere
obtained using Koenig kinetic theorem and Hertz
contact theory.
The total kinetic energy of the motor-rolling bearingsystem is
the sum of the rolling elements, inner race andthe motor:
1
bN
in ball motor
j
T T T T =
= + + (2)
The total potential energy of the motor-rollingbearing system is
the sum of the rolling elements, innerrace, the motor potential
energy and the rollingelements-raceways elastic contact energy:
1
bN
in ball motor contact
j
V V V V V =
= + + + (3)
Fig. 2. Geometric model of rolling bearing.
To study the rolling element bearing structuralvibration
characteristics, the rolling element-racewaycontact can be
considered as a spring mass system, in
which the outer race is fixed in a rigid support and theinner
race is fixed rigidly with the motor shaft. Elastic
deformation between raceways and rolling elementsproduces a
non-linear phenomenon between force anddeformation, which is
obtained by Hertzian theory. Therolling element bearing is
considered as non-linear contact
spring as shown in figure 2.The application of the Hertzian
classical theory of
elasticity to the contact point problem between theraceway and
ball develops a contact area with ellipticalshape (as figure 3
shows). Some parameters aboutcurvature at contact surfaces are
needed in order to obtain
the contact force. The curvature sum parameter isobtained from
Harris [8] as:
1 2 1 2A A B B
= + + +
(4)
And the curvature difference parameter is expressedas:
( )( ) ( )1 2 1 2A A B B
F
+ =
(5)
The parameters rA1, rA2, rB1, rB2, A1, A2, B1 and
B2 can be dependent on the inner and outer raceways asshows
figure 3. If the inner raceway is considered, then:
1 2 1 2
1 2 1 2
; ; ;2 2 2
2 2 2 1; ; ;
B B IA A B B I
A A B B
B B I I
D D Dr r r r r
D D D r
= = = =
= = = =
(6)
Fig. 3. Geometry considered in the ball-raceway point
contact.
If outer raceway is considered, they are given as:
1 2 1 2
1 2 1 2
; ; ;2 2 2
2 2 2 1; ; ;
OB BA A B B O
A A B B
B B O O
DD Dr r r r r
D D D r
= = = =
= = = =
(7)
DB is the ball diameter, DI is the inner racewaydiameter,DO is
the outer raceway diameter, rI is the innergroove radius and rO is
the outer groove radius. Negative
value denotes a concave surface.The relative approach between
steel raceway and steelball, in rolling bearings, is given by
[8]:
( )1/ 34 * 2 / 32,79 10 ( )x Q mm = (8)
in which * is a function ofF(). Hence, the contact force
(Q) is
( ) ( )3/ 2 1/ 25 * 3/ 22,15 10 ( )Q x N
= (9)Also, it means a non-linear relation load-
deformation:
3/ 2
( )Q K N= (10)
-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
3/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
3
Where K is the load-deflection factor for the ballcontact with
the inner raceway and for the ball contactwith the outer raceway
is:
( ) ( )3/ 2 1/ 2
5 *3/ 22.15 10race race race
NK
mm
= (11)race=(in,out)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
F()
*
Fig. 4. The influence of curvature difference parameter on
factor *.
In equation (11), the parameters*
race is obtained from
the figure 4, based on the curvature difference parameter
( )race
F .
In case of the steel roller-steel raceway contact, basedon
Harris [8], the process is simplified, so the load-deflection
factor is:
4 8/910/97.86 10L
NK L
mm = (12)
And the contact force (Q) is:
10/9 ( )LQ K N= (13)
As previously was considered, to obtain motionequations, the
expressions of kinetic and potential energy
for all mechanical components are calculated as:
( )
( )
( )
, ,
, ,
, ,
in in in in
ball j j j
motor in in in
T f x y
T f
T f x y
=
=
=
( )
( )( )
( )
,
,
in in
ball j j
motor in
contact in out
V f y
V f
V f y
V f
=
=
=
=
(14)
And the relative approaches raceways-rolling
elements, in and out(based on figure 2), is expressed as:
( )in jf = (15)
( )out jf = (16)
It allows to calculate Vcontactas:
( ) ( ), , , ,contact in out in in j jV f f x y = = (17)
in which the deformation of spring at inner raceway j(figure 2)
is obtained as:
( ), , ,j in in j jf x y = (18)or most clearly as:
2 2 2
2 ( cos sin )j in in j in j in j jx y x y = + + + (19)
The generalized coordinates j (j=1, 2,, Nb,
whereNb is rolling elements number),xin andyin areable to define
the mechanical state of the system. We
consider in constant and the arc between centres of two
consecutive rolling elements is also constant. From figure2, the
expression (20) is obtained where the angular
position of centres rolling element is localized:
( )
( )
, , ,
21,2,..., 1
j in in j in
j k j bb
f x y
k k NN
+
=
= = (20)
For the generalized coordinate j, where j=1,
2,, Nb, the equations of motion are:
( )
( )[ ] [ ]
[ ] ( )[ ]
2
2
2
sin 2 1
1
2
10
2
1,2,...,
j j j j j j j j
j inin in inLZ LZ
j j
outout out out LZ LZ
j
b
m m g m
kk
kk
j N
+ + + +
+
+ + =
=
(21)
For the generalized coordinatexin the equation is
( ) ( )[ ]1
0bN
j
in R in in in LZj in
m m x k x
=
+ =
(22)
For the generalized coordinate yin the equation is
( ) ( )
( )[ ]1
b
in R in in R
Nj
in in LZj in
m m y m m g
k Wy
=
+ + +
=
(23)
The result is a system of (Nb+2) second-order,
non-linear differential equations. Then the algebraicequations
(21) is necessary to calculate the centres rolling
element angular position. The LZ (Load Zone) in theseequations
indicates if compression in the contact pointexists or not. Then
the deformation at the contact pointswill be calculated in (24) and
(25) as:
( )0
j in j
j in
If LZ f
If LZ
=
= (24)
( )0
j out j
j out
If LZ f
If LZ
=
= (25)
-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
4/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
4
The results obtained from the generalized coordinates
(xin , yin) determine the vibrations of the motor-rollingbearing
system.
The results obtained from the generalized coordinates
(1, 2, , Nb) determine the load at the contactpoints (rolling
element-outer raceway and rolling
element-inner raceway).
III. 3D simulation model
In order to test the analytical formulation presented, a
simulation model of rolling bearing, using Algor
code,has been developed. The software Algor uses the
eventsimulation technique that combines finite elementmethod FEM in
time domain with dynamic events [1, 12].
The analysis and simulations of its kinematics,
dynamic and structural behaviours, in different
serviceconditions, are considered. Finally, the study will
beapplied in a rolling bearing model that contains allmechanical
parameters: materials, friction factors, loads,contact elements,
geometrical restrictions, etc. (see figure5).
Fig. 5. Rolling bearing Algor model in initial position.
The geometric model is designed with thesecharacteristics:
Number of bearing rollers: 13.Roller diameter: 10 mm.Roller
length: 10 mm.Inner raceway diameter: 36 mm.Outer raceway diameter:
56 mm.Pitch diameter: 46 mm.Angular velocity of the inner ring:
4500 rpm.
Mass of the roller: 0.006 kg.
Mass of the inner ring and shaft: 0.078 Kg.Load in the centre of
the inner ring: 2000 N.
By processing simulation model the temporal
evolution of the parameters which define the analytical
model generalized coordinates is obtained. We mean:(xin ,yin)
Position of the inner ring centre, in X
and Y (figure 6).
j ( j=1, 2,, Nb) Radial position of theroller centre.
0 0.01 0.02 0.03 0.04 0.05 0.06
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Time (s)
X(innerring)(mm)
0 0.01 0.02 0.03 0.04 0.05 0.06-0.22
-0.2
-0.18
-0.16
-0.14
-0.12
-0.1
-0.08
Time (s)
Y(innerring)(mm)
Fig. 6. Inner ring centre position, in X and Y.
Data obtained from simulation model are
processed and included in the analytical modeldeveloped. The
distance between centres of twoconsecutive rollers is not
considered as constant and the
angular position of the rolling elements j ( j=1, 2,, Nb) are
included.
In order to obtain partial derivatives of thegeneralized
coordinates, the temporal sequences arederived (see figure 7).
0 0.01 0.02 0.03 0.04 0.05 0.0622.98
23
23.02
23.04
23.06
23.08
Time (s)
(mm
)
0 0.01 0.02 0.03 0.04 0.05 0.06-400
-200
0
200
400
Time (s)
d()(mm
/s)
0 0.01 0.02 0.03 0.04 0.05 0.06
-5
0
5
x 106
Time (s)
dd()(mm
/s2)
Load Zone Load Zone
Fig. 7. Position, velocity and acceleration of the roller
centre.
-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
5/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
5
To obtain the deformation at the contact point of
roller-inner raceway and roller-outer raceway (in and
out), is calculated as:
= + in in roller jr r (26)
= +out out roller jr r (27)
where rin is the inner raceway radius, rout is the outerraceway
radius and rrolleris the roller radius.
IV. Results and discussion
Time domain vibration signals of good roller bearings
obtained from Algor code have been considered toanalyze and
check the Lagrangian model of inner ring
motion. Figure 6 describes the vibration components X eY of
inner ring. The corresponding equations of the inner
ring motion are calculated based on the numericalsimulation
results obtained from Algor code. The time
to reach steady state vibrations needs at least 300 hours ofCPU
simulation time which means more of two cycles ofspindle.
The model presented analyzes the different weight of
energetic levels of rolling element and inner racewaykinetics
and potential terms related with generalized
coordinates. The Lagrangian model considers the Hertzcontact
theory without damping to obtain rolling elementdeformation on
raceways.
In figure 7, it presents radial position, velocity
andacceleration of roller centre to outer ring centre relatedwith
level of contact deformation (inner or outer raceway
roller). The magnitude of deformation at inner and outercontact
can be seen. The elastic contact lets obtain thelevel of load at
roller, we can see the load zone (LZ)variation vs. time, we detect
over 6-7 rolling elements onload zone every time.
Applying the kynematic data from Algor code to
equations 22 and 23, a modulated error signal around 0
N,coordinate X, and anothermodulated error signal around2000 N,
level of initial load, coordinate Y. The dampingand natural
frequencies generate transient vibrations that
must be considered in more complete models in order tostudy the
error signal behaviour (balance equation 22 and
23).In figure 8 and 9, the unbalanced in equations 22 and
23 is presented. We obtain a unbalanced dynamicactuation forces
involving inner ring rotationalcoordinates X, Y around 22 Hz.
(figures 10 and 11), butthe tendency is correct.
The effect of the bearing cage has also not beenconsidered,
experimental evidence suggests that the cagecontacts do not play a
large role in the roller bearing, butthe residual perturbations
obtained with the simulated datamakes necessary a new and more
completed model to
study the influence of geometry and material cage.
0 0.01 0.02 0.03 0.04 0.05 0.06-3000
-2000
-1000
0
1000
2000
3000
Time (s)
Fx(N)
Fig. 8. Error signal of first term eq. 22.
0 0.01 0.02 0.03 0.04 0.05 0.06-3000
-2000
-1000
0
1000
2000
3000
Time (s)
W
(N)
Fig. 9. Error signal of first term eq. 23.
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
10
Frequency (Hz)
PowerSpectralDensity
Fig. 10. Power spectrum of error signal of first term eq.
22.
0 50 100 150 200 250 3000
0.5
1
1.5
2x 10
7
Frequency (Hz)
PowerSpectralDensity
Fig. 11. Power spectrum of error signal of first term eq.
23.
V. Conclusions
A model of the motion of roller bearing (roller
bearings and inner ring) has been developed usingLagrange
equations. Using the Lagrangian model we can
calculate the radial position of the rolling elements and
thecentral point of the inner ring, but a system of
fifteenequations with nonlinear and partial differentials is
neededto solve.
Time domain vibration signals of good roller bearings
obtained from Algor code have been considered to
-
7/28/2019 Dynamic Analysis of Rolling Bearing System Using
Lagrangian Model vs. FEM Code
6/6
12thIFToMM World Congress, Besanon (France), June18-21, 2007
CK-xxx
6
analyze and check the Lagrangian model of inner ringmotion.
Experimental data obtained using a simulation model
agrees reasonably well with predictions. The application
of the analytical model to obtain the centre coordinates ofthe
spindle using the data signal from the Algor codesatisfied the
equations, but a unbalanced error force isdetected at 22 Hz
possible related with natural frequenciesand damping phenomena at
contact rolling element-inner
raceway. The consideration of damping in the simulationstudy
makes necessary a more detailed analysis in futuremodels and
studies.
The model is general and available to other rollerbearings
types, as long as the corresponding FE model canbe accurately
constructed.
The effect of damping has not been studied. When
analyze the orbit of the spindle we observed a erratic
evolution, we must increased the Lagrangian model toanalyze the
impact effect over natural or dampingfrequencies.
Using the analytic model is possible study theinfluence of
bearing faults at the inner or outer raceway
and obtains the vibration effects at the spindle
studyinganalytic model vs. FEM model, and the relative
slidingbetween the bearing surfaces.The authors would thank the
funds provided by theSpanish Government through the Project
MCYTDPI2003-084790-C02-01.
References
[1] ALGOR.DocuTech. ALGOR guide. 1999.[2] S. Braun; D. J. Ewins
and S. S. Rao. Encyclopedia of
Vibration. Academic Press, 2001.
[3] Braun S, Datner, B. Analysis of roller/ball bearing
vibrations. ASME paper 77-WA/DE-5 1977;18.[4] Y. Cao, Y.
Altintas. A general method for the modeling of
spindle-bearing systems. Journal of Mechanical Design,126,
1089-1104, 2004.
[5] N. S. Feng, E. J. Hahn, and R. B. Randall. Simulation
ofvibration signals from a rolling element bearing defect.DSTO
International Conference on Health and Usage
Monitoring, Melbourne, Australia, 2001.
[6] J. C. Garca-Prada, H. Rubio, et alt. Simulacin dedefectos en
elementos rodantes: aplicacin a rodamientos.Anales de Ingeniera
Mecnica, XV CNIM, 1478-1583,
2003.[7] J. C. Garca-Prada, H. Rubio, C. Castejn. Analytical
model of rolling bearing studying ball-race contact
forpredictive maintenance. Multibody Dynamics 2005,ECCOMAS Thematic
Conference. Madrid, Spain, 2124
June 2005.[8] T. A. Harris. Rolling bearing analysis. John
Willey &
Sons, Inc. Fourth Edition, 2001.[9] S. P. Harsha, P. K. Kankar.
Stability analysis of a rotor
bearing system due to surface waviness and number ofballs.
International Journal of Mechanical Sciences, 46,
1057-1081, 2004.
[10] S. P. Harsha. Non-Linear dynamic response of a
balancedrotor supported on rolling element bearings.
MechanicalSystems and Signal Processing. 19, 551-578, 2005.
[11] R. Mitrovi. Anlisis of the influence of internal radial
clearance on the static load rating of the rolling bearing.Facta
Universitatis. Series: Mechanical Engineering. Vol.
1, No 8, pp.1039-1047, 2001.[12] C. C. Spyrakos and J.
Raftoyiannis. Linear and Nonlinear
Finite Element Analysis in Engineering Practice. ISBN: 0-
9652806-2-4 Algor, Inc. Pittsburgh, 1997.[13] M. Tiwari, K.
Gupta and O. Prakash.. Effect of radial
internal clearance of a ball bearing on the dynamics of
abalanced horizontal rotor.Journal of Sound and Vibration.
238(5), 723-756, 2000.
[14] M. Tiwari, K. Gupta and O. Prakash.. Dynamic responseof an
unbalanced rotor supported on ball bearings. Journalof Sound and
Vibration. 238(5), 757-779, 2000.
[15] B. Vangrimde and R. Boukhili. Analysis of the
bearingresponse test for polymer matrix composite laminates:
bearing stiffness measurement and simulation.
CompositeStructures, 56, 359374 (2002).