Embed Size (px)
Citation preview
Marine and CranesThe font colors must reflect the colors of the picture or illustration
Name, department/event, date
November 11, 2014
Use of StarCCM+ for Marine applications at ABB Marine
Oil, Gas and Chemical CFD Conference, November 2014, Houston
Dr. Pasi MiettinenABB Marine, Helsinki, Finland
© ABB Group | Slide 1
Content
Introduction
Definitions
Range of simulation approaches
Our workflow within StarCCM+1. CAD design (3D-CAD)
2. Model set up
3. Meshing
4. Solving
5. Post processing and analyzing the results
Conclusions
Acknowledgements
© ABB Group November 11, 2014 | Slide 2
ABB Marine and Cranes overviewGlobal leader in power and automation
Leading supplier of
Electric power plant & propulsion
Azipod@ propulsors and thrusters
Drives for offshore oil drilling process
Automation and electrification for Harbor cranes
Market leader
Cruise ships
Ice breakers
Offshore supply vessels
LNG carriers
Oil drilling vessels
Global operations
Presence in > 20 countries
Main business centers in Finland, Norway, China
and Singapore
© ABB Group November 11, 2014 | Slide 3

Azipod® - The most environmental friendly propulsion system
Azimuthing electricpropulsion and thrustersystem
Electric motor inside a submerged pod
Speed controlled fixed pitchpropeller
Propulsion module can berotated 360 degrees aroundits vertical axis
Azipod® is a registeredtrade mark of ABB
© ABB Group November 11, 2014 | Slide 4
November 11, 2014© ABB Group
| Slide 5
My background
First cluster experience in 1998 Creep and strength of paperboard packages, Abaqus
Master Thesis, Applied Physics in 1999 University of Jyväskylä, Finland
Modeling airflows of calender nip of a papermachine, Fluent in 2D
PhD, Applied Physics in 2009 University of Jyväskylä, Finland
Simulation of the structure and rheology of wet webs
Fortran code, origin from the University of Wisconsin-Madison
Regular user of StarCCM+ from 2008 Solid Oxide Fuel Cells, heat transfer at elevated temperatures
(> 750degC) and fluid flows at Wärtsilä
Azipod, unsteady sliding mesh and multiphase, free surface flows at ABB Marine from 2012
© ABB Group November 11, 2014 | Slide 6
Definition of dimensionless parameters
Advance number 𝐽𝐽 = 𝑉𝑉𝑛𝑛𝑛𝑛
Velocity V, Propeller rotation speed n, Propeller diameter D
Thrust coefficient of the propeller 𝐾𝐾𝐾𝐾 = 𝑇𝑇𝜌𝜌𝑛𝑛2𝑛𝑛4
Water density ρ, Propeller thrust T
Torque coefficient of the propeller 𝐾𝐾𝐾𝐾 = 𝑄𝑄𝜌𝜌𝑛𝑛2𝑛𝑛5
Propeller torque Q
Thrust coefficient of the pod unit 𝐾𝐾𝐾𝐾𝑢𝑢𝑛𝑛𝑢𝑢𝑢𝑢 = 𝑇𝑇𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝜌𝜌𝑛𝑛2𝑛𝑛4
Pod unit thrust T_unit
Open water efficiency of the propeller 𝑒𝑒𝑒𝑒𝑒𝑒 = 𝐽𝐽𝐽𝐽𝑇𝑇2𝜋𝜋𝐽𝐽𝑄𝑄
Open water efficiency of the pod unit 𝑒𝑒𝑒𝑒𝑒𝑒_𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢 = 𝐽𝐽𝐽𝐽𝑇𝑇_𝑢𝑢𝑛𝑛𝑢𝑢𝑢𝑢2𝜋𝜋𝐽𝐽𝑄𝑄
© ABB Group November 11, 2014 | Slide 7
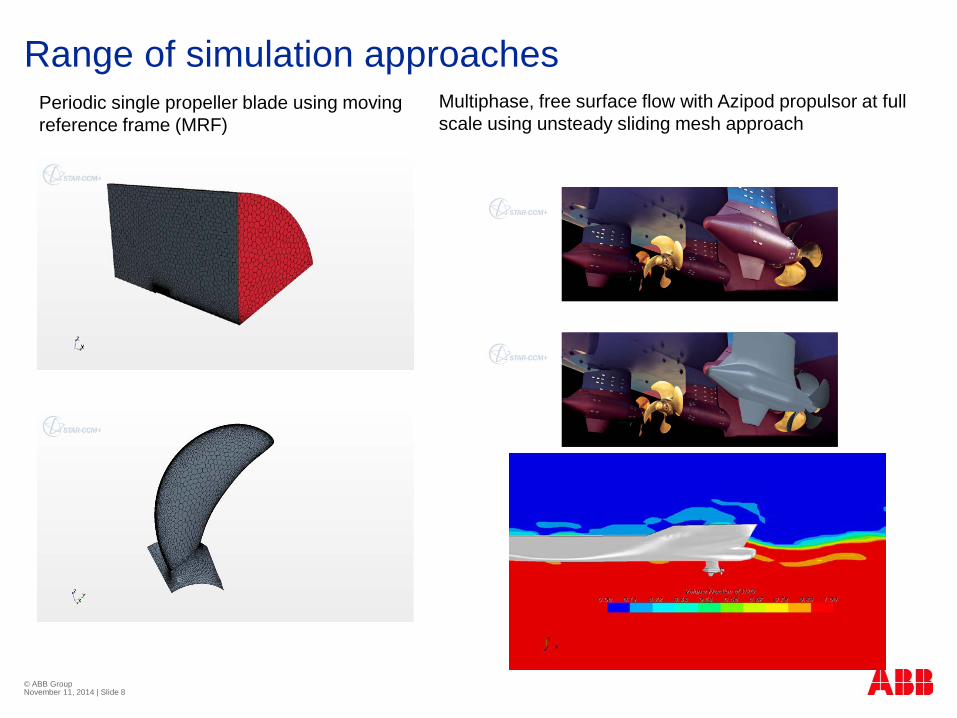
Range of simulation approachesPeriodic single propeller blade using movingreference frame (MRF)
Multiphase, free surface flow with Azipod propulsor at fullscale using unsteady sliding mesh approach
© ABB Group November 11, 2014 | Slide 8
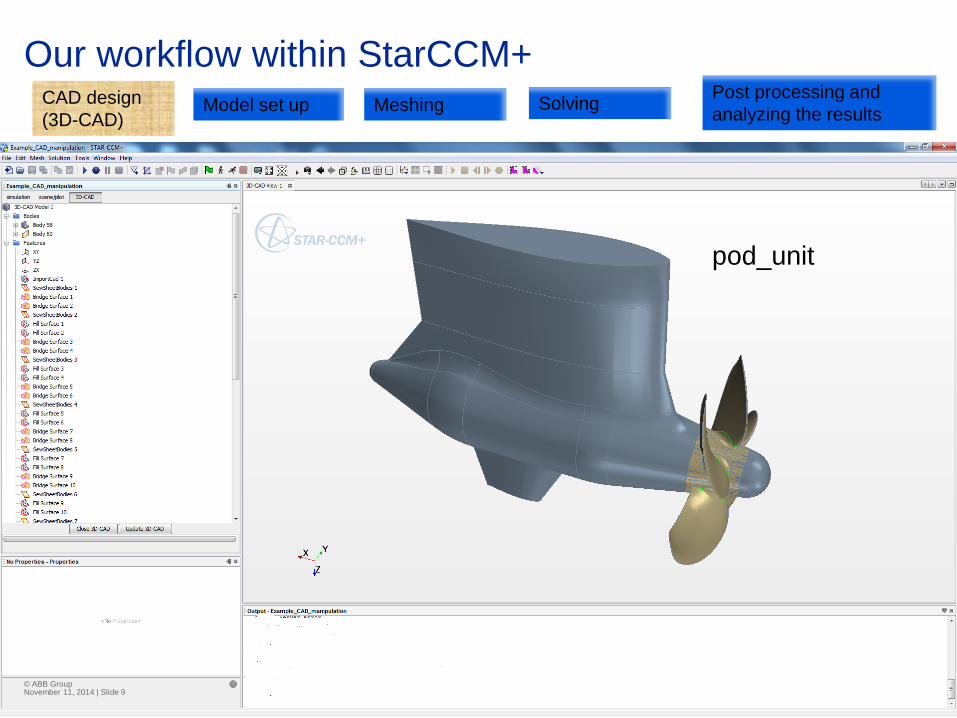
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
pod_unit
© ABB Group November 11, 2014 | Slide 9
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
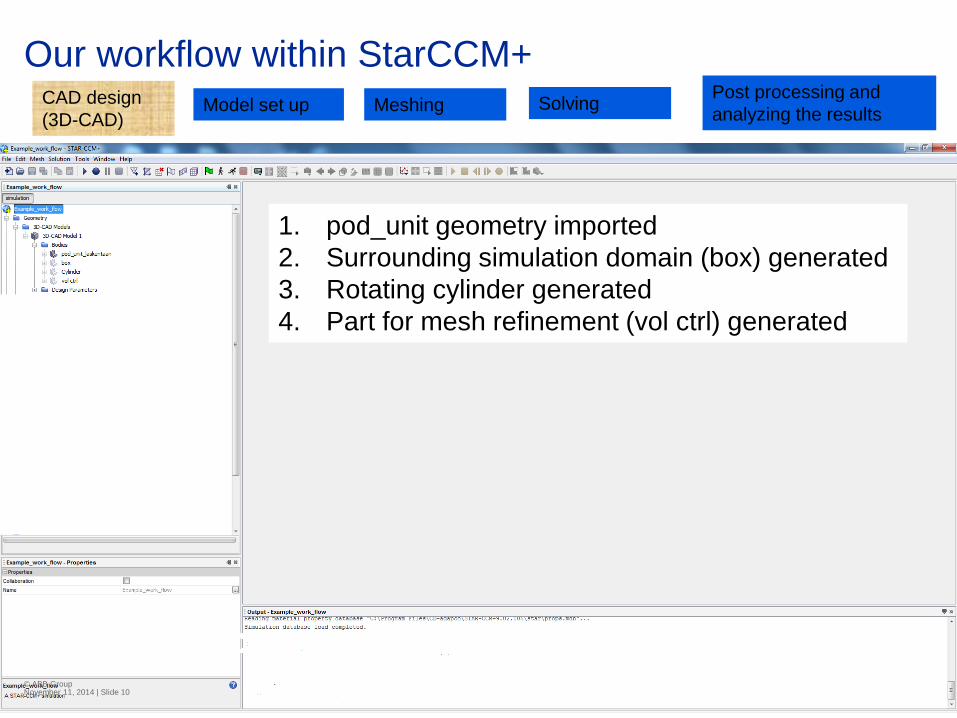
1. pod_unit geometry imported2. Surrounding simulation domain (box) generated3. Rotating cylinder generated4. Part for mesh refinement (vol ctrl) generated
© ABB Group November 11, 2014 | Slide 10
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
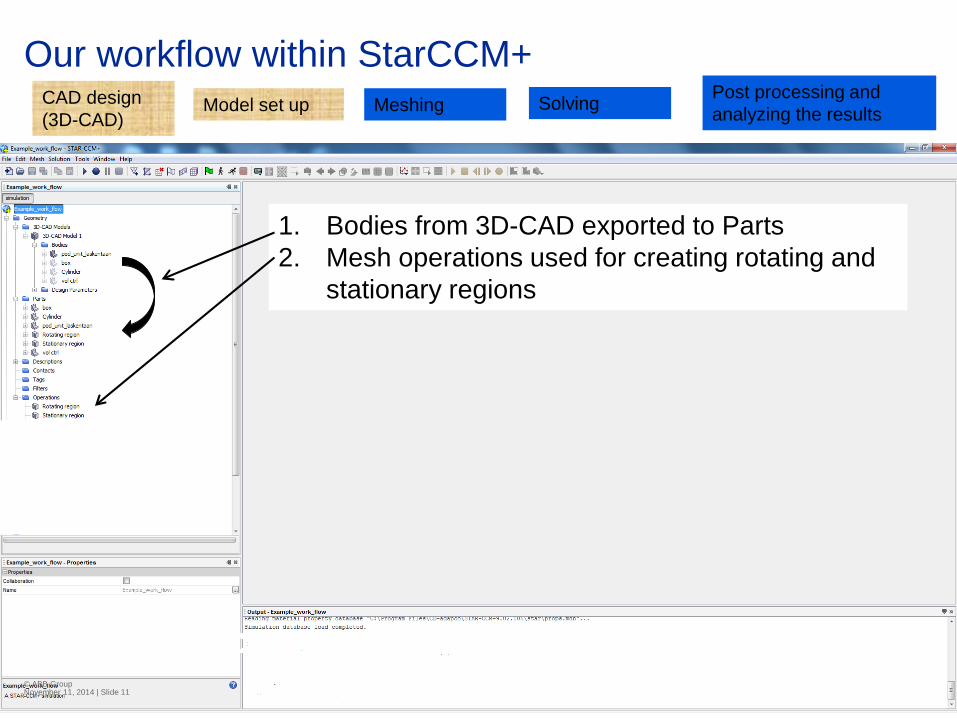
1. Bodies from 3D-CAD exported to Parts2. Mesh operations used for creating rotating and
stationary regions
© ABB Group November 11, 2014 | Slide 11
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
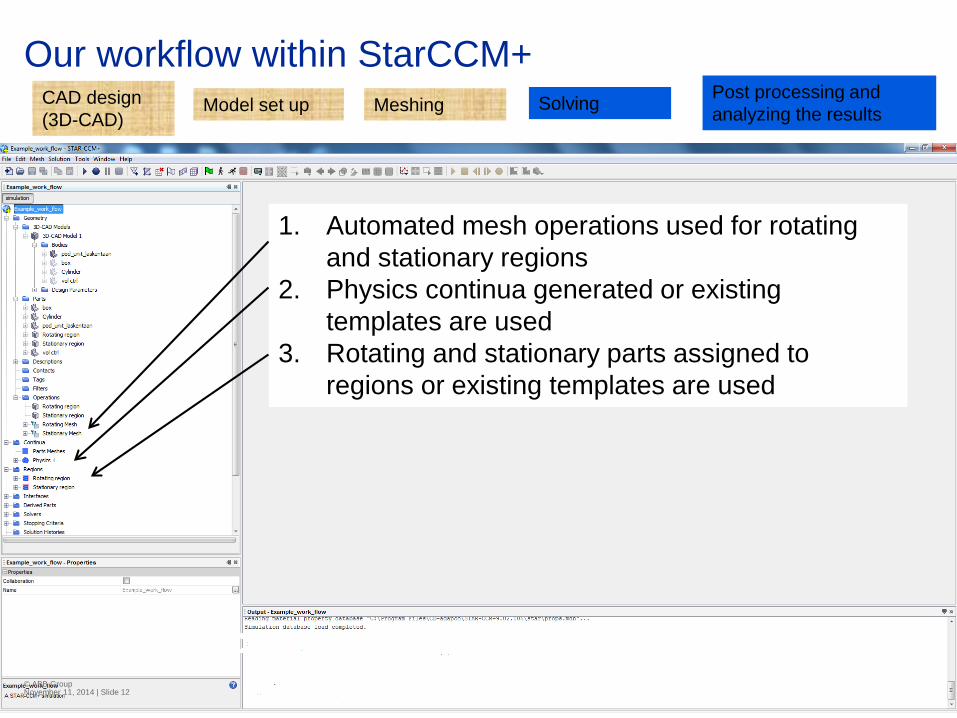
1. Automated mesh operations used for rotatingand stationary regions
2. Physics continua generated or existingtemplates are used
3. Rotating and stationary parts assigned to regions or existing templates are used
© ABB Group November 11, 2014 | Slide 12
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
1. External cluster and java macros are used for speeding up the design cycle
2. Wait…
© ABB Group November 11, 2014 | Slide 13
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
© ABB Group November 11, 2014 | Slide 14
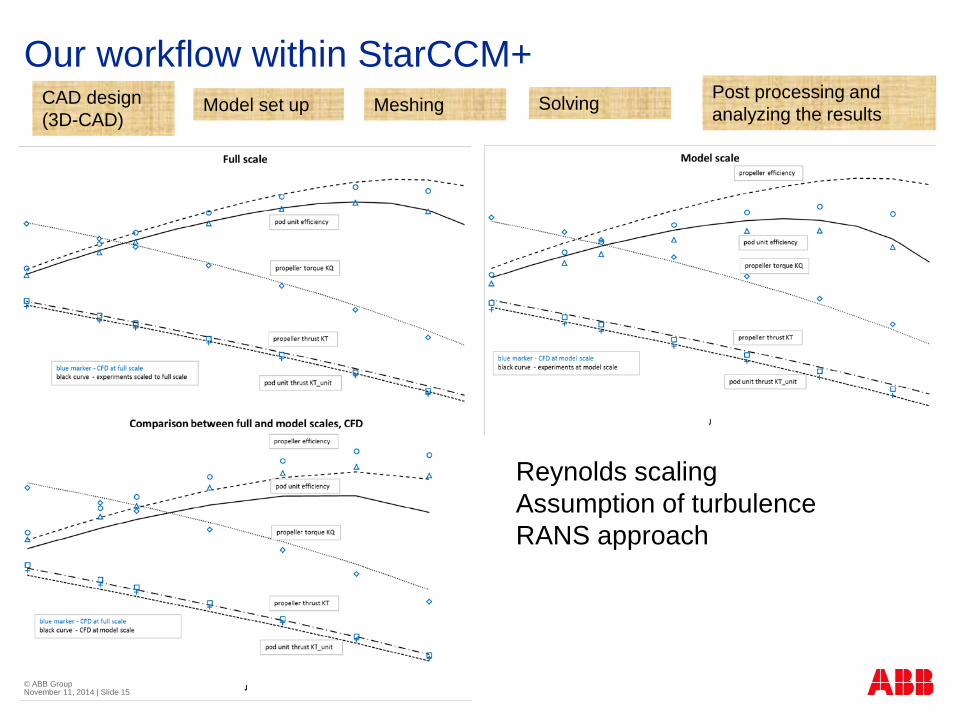
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
Reynolds scalingAssumption of turbulenceRANS approach
© ABB Group November 11, 2014 | Slide 15
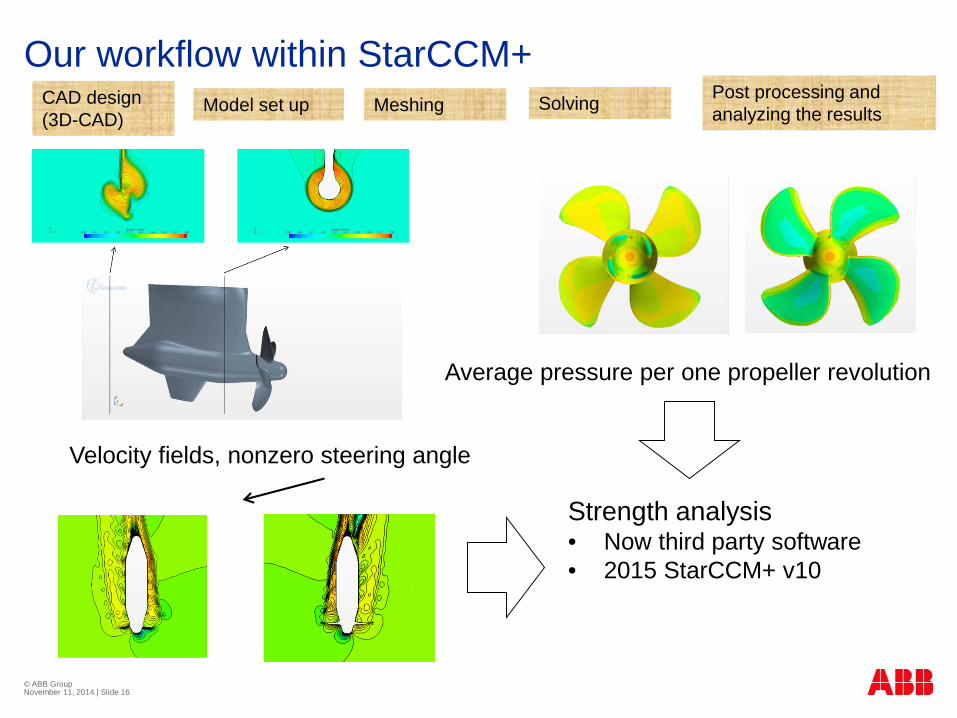
Our workflow within StarCCM+CAD design (3D-CAD)
Model set up Meshing Solving Post processing and analyzing the results
Velocity fields, nonzero steering angle
Average pressure per one propeller revolution
Strength analysis• Now third party software• 2015 StarCCM+ v10
© ABB Group November 11, 2014 | Slide 16
Conclusions
High Performance Computing (HPC) combined with automated meshing operations and java macros hasaccelerated the design cycle significantly
Parts-based meshing is one of the best improvements I have seen within StarCCM+
Next year inclusion of the stress solver with FEA approachwill further speed up the the design cycle
© ABB Group November 11, 2014 | Slide 17
Acknowledgements
Gridcore cluster was utilized
CD-adapco support is fully acknowledged
© ABB Group November 11, 2014 | Slide 18

© ABB Group November 11, 2014 | Slide 19





























