Embed Size (px)
Citation preview

doceamus . . . let us teach
A Missing Piece:Early ElementaryPlane RotationsBob Palais
The formula for plane rotations can and perhapsshould be taught at an elementary level, for its use-fulness in many fields including geometry, physics,and computer animation, and because it unifies andclarifies a wide range of mathematical subjects.
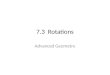
A rotation of the plane that fixes the origin isdetermined by its effect on a single reference point.If the image of (1,0) is (X, Y), the plane rotationformula expresses the image of any point (x, y) asthe multiple x of
Figure 1. The plane rotation formula
Bob Palais is associate professor of mathematics at theUtah Valley University. His email address is [email protected].
Members of the Editorial Board for Doceamus are: DavidBressoud, Roger Howe, Karen King, William McCallum, andMark Saul.
DOI: http://dx.doi.org/10.1090/noti1079
(X, Y) plus the multiple y of (−Y,X), the imageof (0,1):
(1) x〈X,Y〉 + y〈−Y,X〉 = 〈xX − yY , yX + xY〉.The addition and scaling operations call forvector notation 〈 , 〉 instead of point no-tation ( , ). The Pythagorean relation onX and Y can actually be obtained as aconsequence of the formula! The derivationsuggested in Figure 1 requires only basic Euclideangeometry. This makes a variety of exciting anduseful mathematical topics available much earlier.Organizing the curriculum around this marriageof geometry and algebra can also provide a naturalintroduction to and excellent preparation for thenext levels.
The key to the plane rotation formula is theobservation that, when you turn your head 90◦
clockwise, what used to look like (X, Y) nowlooks like (−Y,X). A rotation by a right angleis equivalent to choosing a neighboring pair ofperpendicular rays from the axes of the samerectangular system as positive first and secondcoordinate axes. Applying this twice, the imageof 〈−Y,X〉 is 〈−X,−Y〉, so a quarter-turn rotationbehaves as a square root of −1. By the samereasoning, if a rotation takes (1,0) to (X, Y), thenit must also take (0,1) to (−Y,X). By similartriangle constructions, or simply scaling, the imageof 〈x,0〉 is x〈X,Y〉 = 〈xX, xY〉, and the image of〈0, y〉 is y〈−Y,X〉 = 〈−yY , yX〉. By a congruenttriangle construction, or shift of origin, we arriveat (1): the plane rotation that takes 〈1,0〉 to〈X,Y〉 takes 〈x, y〉 to x〈X,Y〉 + y〈−Y,X〉. We willnow see how this formula unifies the circularaddition formulas, the Pythagorean relation, the
174 Notices of the AMS Volume 61, Number 2

geometric meanings of complex products, powers,exponentials, the dot and cross products, andmore.
With 〈x, y〉 = 〈cos s, sin s〉, 〈X,Y〉 = 〈cos t, sin t〉,(1), the rotation formula (1) becomes
〈cos(s + t), sin(s + t)〉= 〈cos s cos t − sin s sin t, sin s cos t
+ cos s sin t〉.This reunites the two circular addition formulasthat are usually treated separately and betterexplains their related algebraic structure. In con-trast, the kinds of derivations many students expe-rience are like the one given in the 2010 editionof a popular precalculus text.1 Starting from adistance formula obtained by unrelated cut and
paste methods,√(cos s − cos t)2 + (sin s − sin t)2
=√(cos(s − t)− 1)2 + (sin(s − t)− 0)2, two pages
of algebraic manipulation lead to the cosine sub-traction formula by itself. This approach provideslittle insight into the connected and linear structureand origins of both addition formulas. It is hardlysurprising that many students fail to understandthese formulas. Through no fault of their own, theymay feel that math is a pointless, unmotivated, andunpleasant exercise in gymnastic memorization.
Formula (1)wants and contains the Pythagoreanformula that relates the horizontal and verticalcomponents of a reference point to which 〈1,0〉 canbe rotated. Because if 〈1,0〉 is rotated to 〈X,Y〉, then〈X,−Y〉 returns to 〈1,0〉 = 〈xX − y(−Y), x(−Y)+yX〉 = 〈X2 + Y 2,0〉. At the basic level, this is justreflection symmetry, or Pythagoras as a specialcase of the addition formula: cos(t − t) = cos(0) =1 = cos(t) cos(−t) − sin(t) sin(−t). When scalingis incorporated, the same analysis explains the twoscaling factors of R in X2 + Y 2 = R2.
In 1799, Wessel saw that (1) could be interpretedto define a complex multiplication isomorphic to(x+yi)(X+Yi) = (xX−yY)+ (yX+xY)i. It is nocoincidence that, in the same paper, Wessel alsofirst introduced the geometric interpretation ofvector addition as uniting directed segments “insuch a way that the second begins where the firstends. The sum is from the first to the last point ofthe united segments.” Interpreting complex powersas iterated rotation and scaling permits a morecomplete connection among the cornerstones ofthe “College Algebra” curriculum: exponentials,polynomials and their zeros, and systems of linearequations. The Fibonacci-like dynamical systemsthat evolve deterministically from two initialconditions are a wonderful example that combinesall this and more, and also leads naturally to the
1See http://math.utah.edu/%7Epalais/AMissingPiecefor this and other comparisons and examples.
corresponding material at the calculus level. Forexample, the solutions of Fn+2 = 5Fn+1 − 6Fn arec12n+c23n, a superposition of exponentials whosebases are solutions of the polynomial equationx2 = 5x− 6, and whose coefficients are found bysolving a system of linear equations to match theinitial conditions. When the difference equation isreplaced with y ′′ = 5y ′ − 6y , we just change torates for natural exponentials: c1e2t + c2e3t . Evencloser to Fibonacci, when the sum is replacedby a difference, Fn+2 = Fn+1 − Fn, the rotationformula explains the 6-step periodicity of the basicsolutions xn = 2,1,−1,−2,−1,1,2,1, . . . and yn =0,1,1,0,−1,−1,0,1, . . . . They also may be writtenc1rn+ + c2rn− , where r± are solutions of x2 = x− 1,each one-sixth turn from 1 on the unit circle.The points (xn, yn) lie on an ellipse, x2
n + 3y2n = 4,
corresponding to the hyperbolas y2n−5x2
n = ±4 thatcontain the standard Fibonacci-Lucas pairs xn =1,1,2,3,5, . . . , yn = 1,3,4,7,11, . . . . The solutionsof y ′′ = y − 1 are c1er+t + c2er−t . See the footnotelink for how the rotation formula can also simplifythe derivation and analysis of conic sections.
Rectangular coordinates are specified usingEuclid’s perpendicular bisector construction by achoice of origin, a second point for direction andunit on the first axis, and an orientation for thepositive direction of the second (counterclockwisein math, clockwise in computer graphics). Then anytwo rectangular coordinate systems may be relatedby a combination of shift of origin, scaling, rotation,and reflection, corresponding to complex addition,multiplication, and conjugation, respectively! Itseems a shame for our students to be deprivedof the one missing transformation, rotation, whenproviding access to it is so elementary and permitsso much utility and insight.
At the calculus level, the quarter-turn rotationformula 〈−y, x〉 also expresses the physics ofuniform circular motion and Hooke’s spring. Whenmotion is neither inward nor outward, velocitymust be perpendicular to displacement: 〈x, y〉′ =〈−y, x〉 or z′ = iz. This physically motivatedand geometrically natural relationship providesa definition of the cosine and sine functionsthat parameterize our reference point 〈X,Y〉, andexplains Euler’s formulaeit = cos t+i sin t . All otherproperties follow easily from this starting point.Applied twice, 〈x, y〉′′ = 〈−x,−y〉, or z′′ = −z, saysacceleration is opposite to displacement. Fromthe differential equations perspective, 〈−y, x〉 isa change of variables, the linear combinationX〈x, y〉 + Y〈−y, x〉 is a linear superposition ofsolutions, and the Pythagorean symmetry reflectstheir invariance under time reversal. Formula (1)is also the origin of the Cauchy-Riemann equationsthat characterize an analytic function of a complexvariable z as independent of z = x− iy .
February 2014 Notices of the AMS 175

It is well known that the negative reciprocalcondition that two lines are perpendicular failswhen one is vertical. The condition that twodirections v = 〈v1, v2〉 and w = 〈w1, w2〉 arecollinear, w = cv, also fails when v = 0. Thevanishing of the plane cross product v × w =v1w2 − v2w1 is a test for collinearity that doesnot suffer from this exception. Directions areperpendicular if a quarter-turn rotation makesthem collinear. Combining the cross product andthe quarter-turn rotation formula, the vanishingof plane dot product v ·w = v1w1 + v2w2 is a testfor orthogonality that has no exception.
The plane rotation formula provides a greatsetting to introduce geometric vector algebraand matrices, where equation (1) takes the form[ X −YY X
] [ xy]. A direct calculation using plane rota-
tion formula (1) and its consequence X2 + Y 2 = 1confirms that, if the same rotation R is applied toboth v and w, the dot product of the images isthe same: Rv ·Rw = v ·w. We may simultaneouslyrotate any such vectors so that the image of the firstis along the positive x1-axis, 〈r1,0〉, and that of thesecond is 〈r2 cos t, r2 sin t〉, where r2
1 = v21 +v2
2 andr2
2 = w21 +w2
2 . This standard configuration exhibitsthe meaning of the dot product v ·w = r1r2 cos t ,where t is the angle between v and w. Any rotationof space in three or higher dimensions and the stan-dard configuration may be constructively obtainedthrough a sequence of coordinate plane rotations,so the dot product v ·w =
∑nj=1 vjwj immediately
inherits the same invariance and interpretation.Therefore, the generalization of the above dotproduct to v ·w =
∑nj=1 vjwj immediately inher-
its the same invariance and interpretation. Thedefinition, invariance, and interpretation of thethree-dimensional cross product
v×w
= v1〈0,−w3, w2〉+v2〈w3,0,−w1〉+v3〈−w2, w1,0〉can also be easily understood in terms of coordinateplane rotations.
Collectively, these observations give rise to auseful and purely three-dimensional interpretationof quaternions and their multiplication that we willdiscuss elsewhere. There are many more examplesthat cannot be covered here, but perhaps this briefsurvey will stimulate more inquiry, discussion, anddiscovery!
176 Notices of the AMS Volume 61, Number 2