Embed Size (px)
Citation preview

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 1

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
L I NÓI Đ UỜ Ầ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 2

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
#include <18F4431.h>
#include <def_18f4431.h>
#device *=16 ADC=10
#device high_ints=1
#FUSES NOWDT, H4,PUT, NOPROTECT, NODEBUG, BROWNOUT, NOLVP, NOCPD, NOWRT,
#use delay(clock=40MHZ)
const int16 sinewave[200]= {
0,31,63,94,126,157,188,219,251,282,313,344,375,406,436,467,497,528,558,588,618,
648,677,707,736,765,794,823,852,880,908,936,964,991,1018,1045,1072,1098,1124,
1150,1176,1201,1226,1250,1275,1299,1323,1346,1369,1392,1414,1436,1458,1479,1500,
1521,1541,1561,1580,1599,1618,1636,1654,1672,1689,1705,1721,1737,1753,1768,1782,
1796,1810,1823,1836,1848,1860,1871,1882,1892,1902,1912,1921,1929,1937,1945,1952,
1958,1965,1970,1975,1980,1984,1988,1991,1994,1996,1998,1999,2000,2000,1999,1998,1996,
1994,1991,1988,1984,1980,1975,1970,1965,1958,1952,1945,1937,1929,1921,1912,1902,
1892,1882,1871,1860,1848,1836,1823,1810,1796,1782,1768,1753,1737,1721,1705,1689,
1672,1654,1636,1618,1599,1580,1561,1541,1521,1500,1479,1458,1436,1414,1392,1369,
1346,1323,1299,1275,1250,1226,1201,1176,1150,1124,1098,1072,1045,1018,991,964,
936,908,880,852,823,794,765,736,707,677,648,618,588,558,528,497,467,436,406,375,
344,313,282,251,219,188,157,126,94,63,31,0};
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 3
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
int8 i=50,j=0,k,kt,so,TEXT1=5,t;//////////////////
int16 tg,x,value,value1;//////////////////////////
float KP=0,VOL_SV,VOL_PV=510,Er=0,VOL1,VOL2,c,d;//
float tem,duty=50;////////////////////////////////
int8 kt1,inter;///////////////////////////////////
signed long Er2=0;/////////////////////////////// cai dat vao ra
#int_EXT2
void EXT_isr(void)
{
if(kt1==3) i=so;//khi say ra ngat thi tuong ung voi goc pha theo tinh toan khoag 22 do
if(k==0)
{
disable_interrupts(INT_PWMTB);// tat ngat pwm de tranh ngat cao
enable_interrupts (int_timer1 ) ;
set_timer1(0);
rc0=0;
rc1=0;
ext_int_edge(h_TO_l );// chon ngat xuong de tinh do rong xung
enable_interrupts(INT_EXT2_h2l);
KT1=2;
}
if(k==1)
{
x=get_timer1();
t=x*0.8;
tg=(t-10000)/2;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 4

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
so=tg/50;
KT1=3;
rc0=0;
rc1=0;
ext_int_edge(l_TO_h );// chon ngat len
}
if(kt1==2)kt1=1;
}
void shutdown_s()////tat he thong
{
re1=1;//bat chuog
rc4=1;//tat sg2525
ra5=1;//tat ir2110
disable_interrupts(INT_PWMTB);
}
void restart_s()// khoi dong lai he thong
{re1=0;//tat chuog
rc4=0;//bat sg2525
ra5=0;//bat ir2110
enable_interrupts(INT_PWMTB);
}
#int_pwmtb fast
void interrupt_timer2() // thiet lap d rong xung moi
{
if(j==0)
{kt=0;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 5

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
value=sinewave[i]*Er;
value1=(2000-value);
if(value1>2000) value1=2000;
set_power_pwm2_duty(2000);
set_power_pwm0_duty(value1);
}
if(j==1)
{kt=1;
value=sinewave[i]*Er;
value1=(2000-value);
if(value1>2000) value1=2000;
set_power_pwm0_duty(2000);
set_power_pwm2_duty(value1);
}
i++;
if(i==100)
{
set_adc_channel(1);// do ap phan hoi
delay_us(1);
VOL1=read_adc();
VOL2=read_adc();
VOL_SV=(VOL1+VOL2)/2;
IF((VOL_SV<VOL_PV)&&(TEXT1==1))
{
KP=KP+0.000001;
IF(VOL_SV>VOL_PV){TEXT1=2;Kp=0.6*kp;}
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 6

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
}
Er2=VOL_PV-VOL_SV;
Er=Er+Kp*Er2;// thuat toan p de on dinh dien ap
if(Er>510)Er=510;
IF(Er<0)Er=0;
}
if(i==200)
{
if(kt==1) {j=0;i=0;}
if(kt==0) {j=1;i=0;}
}
}
#int_timer5
void interrupst()// khoi dong lai he thong nen bao loi tiep thi tat hoan toan
{ // he thong
inter=inter+1;
restart_s();
}
void main()
{
set_tris_c(0x00);
portc=0x00;
trisa=0b11111111;
porta=0x00;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 7

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
trisb=0x00;
portb=0x00;;
trisd=0x00;
portd=0x00;
trise=0x00;
porte=0x00;
RE1=0;//chuong
rc1=0;//relay1
rc0=0;//relay1
rc2=0;//fan
rc4=0;//tat sg3525
re1=0;//
ra5=0;//bat ir2110
delay_ms(50);
re1=0;
SETUP_ADC(ADC_CLOCK_INTERNAL);
SETUP_ADC_PORTS(sAN1); // dien ap ac phan hoi
SETUP_ADC_PORTS(sAN2); // do nhiet do
SETUP_ADC_PORTS(sAN4); // do dong ac
SETUP_ADC_PORTS(sAN3); // do ap ac hoa dong bo
setup_timer_2(T2_DIV_BY_16,255,1);
setup_ccp2(CCP_PWM);
set_pwm2_duty(duty);// dieu khien toc do quat
ext_int_edge(h_TO_L );// chon ngat len
enable_interrupts(INT_EXT_h2l); //du ap nghich luu
enable_interrupts(INT_EXT2_h2l); // dongpha
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 8

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
setup_power_pwm_pins(PWM_COMPLEMENTARY,PWM_COMPLEMENTARY,PWM_OFF,PWM_OFF);
setup_power_pwm(PWM_CLOCK_DIV_4|PWM_FREE_RUN,1,0,499,0,1,10);
enable_interrupts(INT_PWMTB);
ext_int_edge(l_TO_h);// chon ngat len
setup_timer_1(T1_INTERNAL|T1_DIV_BY_8);
setup_timer_5(T5_INTERNAL|T5_DIV_BY_8);
disable_interrupts(int_ext2);
enable_interrupts(GLOBAL);
delay_ms(10);
////////// ket thog qua trinh cai dat
while(1)
{
set_adc_channel(2);// do nhiet do
c=read_adc();
if((c>206) &&(c<400))
{
duty=duty+50;
if(duty>1023)duty=1023;
}
set_adc_channel(4);// do dong dc
d=read_adc();
if((c>400)||(d>615))
{
shutdown_s();
enable_interrupts(INT_timer5);
set_timer1(0);
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 9

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
}
if(inter==2)
{
shutdown_s();
disable_interrupts(global);
}
}
}
CH NG 1: C S LÝ THUY T V NĂNG L NG GIÓƯƠ Ơ Ở Ế Ề ƯỢ
1.1.Khái quát ti m năng năng l ng gió Vi t Namề ượ ở ệGió là hi n t ng t nhiên th ng g p, nó ho t đ ng kh p n i trên trái ệ ượ ự ườ ặ ạ ộ ở ắ ơ
đ t. Tuy nhiên tính ch t gió ph thu c vào nhi u y u t khác nhau và phân b ấ ấ ụ ộ ề ế ố ốkhông đ u trên các vùng. T i bi n đông khu v c đ o Tr ng Sa, B ch Long Vĩ…ề ạ ể ự ả ườ ạv n t c gió trung bình kho ng 6m/s, m t đ công su t vùng này kho ng ậ ố ả ậ ộ ấ ả200W/m2 đ n 300W/mế 2.
1.2.M c tiêu c a v n đ năng l ng gió trong ch ng trình năng l ng ụ ủ ấ ề ượ ươ ượm iớVi c phát tri n ngu n năng l ng gió là m t trong nh ng v n đ tr ng tâm ệ ể ồ ượ ộ ữ ấ ề ọ
c a ch ng trình năng l ng m i, năng l ng tái t o đ khuy n khích phát tri nủ ươ ượ ớ ượ ạ ể ế ể
ngu n đi n s d ng năng l ng t i ch , năng l ng m i và tái t o đ cung c p ồ ệ ử ụ ượ ạ ỗ ượ ớ ạ ể ấđi n cho vùng nông thôn, mi n núi và h i đ o.ệ ề ả ả
M c tiêu c a ch ng trình nghiên c u s d ng năng l ng gió là gi i quy t ụ ủ ươ ứ ử ụ ượ ả ếv n đ ô nhi m môi tr ng nh h ng đ n s c kh e con ng i. Sau đó ti n t i ấ ề ễ ườ ả ưở ế ứ ỏ ườ ế ớkhai thác năng l ng gió và ph c p vi c ng d ng các thi t b s d ng năng ượ ổ ậ ệ ứ ụ ế ị ử ụl ng gió trong n n kinh t qu c dân m t cách kinh t nh t.ượ ề ế ố ộ ế ấ
1.3. Tình hình s d ng năng l ng gió trên các n c và Vi t Namử ụ ượ ướ ệ1.3.1. các n c trên th gi iỞ ướ ế ớ
Hi n nay các n c trên th gi i đã ti n hành nghiên c u s d ng năng ệ ướ ế ớ ế ứ ử ụl ng gió r t nhi u và mang l i hi u qu kinh t t ng đ i cao, góp ph n gi i ượ ấ ề ạ ệ ả ế ươ ố ầ ảquy t kinh t năng l ng c a qu c gia và v n đ c n ki t năng l ng c a th ế ế ượ ủ ố ấ ề ạ ệ ượ ủ ếgi i.ớ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 10

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Ngoài nh ng n c nh Mỹ, n Đ , Đ c, Tây Ban Nha đã và đang phát tri n ữ ướ ư Ấ ộ ứ ểr t m nh phong đi n, m t s n c khác cũng có k ho ch phát tri n phong đi nấ ạ ệ ộ ố ướ ế ạ ể ệ
nh Trung Qu c d ki n tăng công su t l p đ t phong đi n lên kho ng ư ố ự ế ấ ắ ặ ệ ả30.000MW vào năm 2030 và đ n anwnm 2050 công su t d t phong đi n đ t ế ấ ặ ệ ạm c 1,5 tri u MW, s n l ng 4.092 TWh.ứ ệ ả ượ
1.3.2. Vi t NamỞ ệT ng ti m năng đi n gió c a Vi t Nam c đ t 513.360MW t c là h n 200 ổ ề ệ ủ ệ ướ ạ ứ ơ
l n công su t c a th y đi n S n La và h n 10 l n t ng công su t d báo c a ầ ấ ủ ủ ệ ơ ơ ầ ổ ấ ự ủngành đi n vào năm 2020.ệ
Các d án đã và đang xây d ng t i Vi t Nam:ự ự ạ ệ
- D án đi n gió gió t i Cù Lao Chàm 1,5KW, Qu ng Namự ệ ạ ả- D án đi n gió Ph ng Mai 500MW, Bình Đ nhự ệ ươ ị- D án đi n gió Côn Đ o 7,5MW, Bà R a – Vũng Tàu.ự ệ ả ị- D án đi n gió Xuân Hòa, Xuân H i 45MW, Phú Yên.ự ệ ả- D án đi n gió l n nh t Đông Nam Á t i Tuy Phong 30MW, Bình Thu n ự ệ ớ ấ ạ ậ
đã phát đi n hòa l i Qu c gia.ệ ướ ố1.4. Gi i thi u các lo i h th ng gió, các h ng gióớ ệ ạ ệ ố ướ1.4.1. Các lo i h th ng gióạ ệ ố1.4.1.1. H th ng gió Bridệ ố ơ
Vùng b bi n th ng có gió bi n đ i theo chu kỳ ngày-đêm m t cách có h ờ ể ườ ế ổ ộ ệth ng mà ng i ta g i là gió brid bi n ban ngày và brid đ t li n vào ban đêm. ố ườ ọ ơ ể ơ ấ ềGió brid bi n t o thành m t hoàn l u khép kín và đ chênh l ch nhi t đ gi a ơ ể ạ ộ ư ộ ệ ệ ộ ữbi n và đ t li n. Đ c bi t vào đ u mùa hè, nhi t đ m t bi n t ng đ i th p ể ấ ề ặ ệ ầ ệ ộ ặ ể ươ ố ấ ởnhi u vùng, trong khi trên đ t li n b c x m t tr i ban ngày khi n cho m t đ t ề ấ ề ứ ạ ặ ờ ế ặ ấnóng lên. B c x m t tr i gây nên s đ t nóng trên m t đ t và không khí sát m tứ ạ ặ ờ ự ố ặ ấ ặ
đ t khi n kh i l ng không khí nh đi và b c lên cao. Không khí trên cao t o ấ ế ố ượ ẹ ố ạthành m t dòng ch y ra bi n và l ng xu ng t o thành m t đ ng khép kín. Dòngộ ả ể ắ ố ạ ộ ườ
tr v bi n trên cao kho ng 0,5 km đ n 4 km trên m t đ t. Gió brid xâm ở ề ể ở ả ế ặ ấ ơnh p vào đ t li n d ng l i khi s mát lên vào ban tr a làm ng ng đ chênh l ch ậ ấ ề ừ ạ ự ư ư ộ ệáp su t gi a bi n và l c đ a. T c đ gió brid l n nh t th ng th y đ cao ấ ữ ể ụ ị ố ộ ơ ớ ấ ườ ấ ở ộ10m, h ng gió nói chung vuông góc v i b bi n, nh ng th ng b l ch vào ban ướ ơ ờ ể ư ườ ị ệngày, đi theo xoáy ngh ch do l c côriôlit. C ng đ và s xâm nh p vào đ t li n ị ự ườ ộ ự ậ ấ ềc a gió brid tùy thu c vào s n đ nh c a khí quy n. Khi l p khí quy n b t n ủ ơ ộ ự ổ ị ủ ể ớ ể ấ ổđ nh, h th ng gió brid th ng là y u.ị ệ ố ơ ườ ế1.4.1.2. H th ng gió núiệ ố
Núi có tác đ ng l n đ n dòng khí quy n. vùng núi, ng i ta th ng th y ộ ớ ế ể Ở ườ ườ ấcó lo i gió núi và gió thung lũng. Ban ngày b c x m t tr i đ t nóng s n núi, ạ ứ ạ ặ ờ ố ườ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 11

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
làm không khí n núi nóng h n không khí thung lũng, không khí nh h n tr n ườ ơ ẹ ơ ườtheo s n núi lên cao t o thành gió thung lũng. V ban gày xãy ra quá trình ườ ạ ềng c l i hình 1.1. Tr ng gió thung lũng nói chung có c ng đ y u h n tr ngượ ạ ườ ườ ộ ế ơ ườ
gió brid . Tuy nhiên m t n i k t h p hai lo i gió này v i nhau t o thành gió ơ ở ộ ơ ế ợ ạ ớ ạkhá m nh t i đ a ph ng.ạ ạ ị ươ
Hình 1 S đ minh h a gió núi và thung lũngơ ồ ọ1.4.2. Các c p gióấ
Trong t nhiên có t t c 12 c p gió theo th t nh sau: L ng gió, gió ự ấ ả ấ ứ ự ư ặtho ng, gió nh , gió t ng đ i nh , gió bình th ng, thanh phong, c ng phong, ả ẹ ươ ố ẹ ườ ườgió m nh, đ i phong, li t phong, ác phong, b c phong, r t m nh.ạ ạ ệ ộ ấ ạ
1.5. Hi n t ng gia t c dòng không khíệ ượ ốKhi dòng không khí c i qua v t c n thì t c đ sẽ tăng lên l i g n đ nh c a v tở ậ ả ố ộ ạ ầ ỉ ủ ậ
c n, nh h ng ngày càng l n khi đ a hình c a v t c n ngày càng tr n tru, gia ả ả ưở ớ ị ủ ậ ả ơt c lý t ng khi đ d c kho ng 16ố ưở ộ ố ả 0 ho c khi dòng ch y đ xu ng thung lũng.ặ ả ổ ố1.6. Năng l ng gióượ
Gió chính là k t qu c a s chuy n đ i th năng c a không khí thành đ ng ế ả ủ ự ể ổ ế ủ ộnăng ch y u qua công c a áp l c.ủ ế ủ ự
Công su t đ ng năng c a dòng không khí chuy n đ ng tính trong m t giây:ấ ộ ủ ể ộ ộ
P=12
(ρ . A .V ) .V2 = 12ρ . A .V3 (W )
T công th c này ta th y r ng:ừ ứ ấ ằ+ Công su t t l thu t v i kh i l ng riêng không khíấ ỷ ệ ậ ớ ố ượ+ Công su t t l thu n v i di n tích đón gióấ ỷ ệ ậ ớ ệ+ Công su t t l v i l p ph ng v n t c gióấ ỷ ệ ớ ậ ươ ậ ố
K t lu n ch ng 1ế ậ ươ
Năng l ng gió là m t d ng năng l ng tái t o vô t n v i tr l ng l n.ượ ộ ạ ượ ạ ậ ớ ữ ượ ớ Đó
là m t trong các ngu n năng l ng tái t o quan tr ng nh t mà thiên nhiên banộ ồ ượ ạ ọ ấ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 12

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
t ng cho hành tinh chúng ta. Năng l ng gió có th nói là vô t n. Tuy nhiên, đặ ượ ể ậ ể
khai thác, s d ng ngu n năng l ng này c n ph i bi t các đ c tr ng và tínhử ụ ồ ượ ầ ả ế ặ ư
ch t c b n c a nó.ấ ơ ả ủCh ng 1 đã gi i thi u đ c các v n đ :ươ ớ ệ ượ ấ ề
- C u trúc c a gió và đ c đi m c a ngu n năng l ng gió.ấ ủ ặ ể ủ ồ ượ- Các ph ng pháp khai thác, s d ng năng l ng gió hi n nay.ươ ử ụ ượ ệXu t phát t nh ng v n đ lý thuy t đã nêu,ch ng 2, ch ng 3 gi i thi uấ ừ ữ ấ ề ế ươ ươ ớ ệ
m t trong nh ng ng d ng quan tr ng c a ngu n năng l ng này, đó là thi t kộ ữ ứ ụ ọ ủ ồ ượ ế ế
m ch đ ng l c và m ch đi u khi n cho h th ng ngu n năng l ng gió.ạ ộ ự ạ ề ể ệ ố ồ ượ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 13

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
CH NG 2ƯƠ : T NG QUAN CÁC PH NG PHÁP CHUY N Đ I PHONGỔ ƯƠ Ể Ổ ĐI NỆ SANG ĐI N XOAY CHI UỆ Ề
M t h th ng năng l ng phong đi n đ c đ nh nghĩa là m t t h p c a cácộ ệ ố ượ ệ ượ ị ộ ổ ợ ủ
thành ph n sau đây:ầ
- Máy phát phong đi n.ệ
- B tích tr đi n năng.ộ ữ ệ
- Các thi t b đi u khi n, bi n đ i đi n, t o cân b ng năng l ng trong hế ị ề ể ế ổ ệ ạ ằ ượ ệ
th ng. ố
- Các t i (thi t b ) tiêu th đi nả ế ị ụ ệ
Hình 2.1. S đ kh i m ch đ ng l cơ ồ ố ạ ộ ự
B chuy n đ i 2 tr ng thái s d ng m t b chuy n đ i DC-DC (1chi u - 1ộ ể ổ ạ ử ụ ộ ộ ể ổ ề
chi u) đ thích nghi v i m c đi n áp và đi n tr t ề ể ớ ứ ệ ệ ở ừ máy phát phong đi n và m tệ ộ
b bi n đ i DC-AC (1chi u - xoay chi u) hình sin đ th c hi n k t n i l i ộ ế ổ ề ề ể ự ệ ế ố ướ ở
230V và 50Hz. Đi n áp +ệ 9V và 18V đ c cung c p cho b chuy n đ i DC-DC vàượ ấ ộ ể ổ
b chuy n đ i DC-AC.ộ ể ổ
Đ c đi m kỹ thu tặ ể ậ Giá trị
DC-DC đi n áp vàoệ 50 V - 90 V
DC-DC đi n áp raệ 350 V
DC-AC đi n áp raệ 230 Vac
Công su t ra danh đ nhấ ị 600W
DC-AC chuy n đ i t n sể ổ ầ ố 20 kHz
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 14

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
DC-DC chuy n đ i t n sể ổ ầ ố 27 kHz
Đi n áp l iệ ướ 230 V +/- 20%
T n s l iầ ố ướ 50 Hz
B ng 2.1: Đ c đi m kỹ thu t c a h th ngả ặ ể ậ ủ ệ ố
D a trên yêu c u c a đ tài ta có 2 ph ng pháp chuy n đ i nh sau: ự ầ ủ ề ươ ể ổ ư
+ DC ( th p ) ấ AC ( th p ) ấ AC ( cao )
+ DC ( th p ) ấ DC ( cao ) AC ( cao )
Hi n nay, đa s các b bi n đ i đi n hi n đ i đ u s d ng ph ng phápệ ố ộ ế ổ ệ ệ ạ ề ử ụ ươ
chuy n đ i t DC ( th p ) ể ổ ừ ấ DC ( cao ) AC ( cao ) v i khâu trung gian làớ
đi n m t chi u đi n áp cao. u đi m n i b c c a ph ng pháp này là vi c tăngệ ộ ề ệ Ư ể ổ ậ ủ ươ ệ
áp t DC ( th p ) ừ ấ DC ( cao ) s d ng máy bi n áp cao t n g n nh (lõi Ferit),ử ụ ế ầ ọ ẹ
công su t l n, không c ng k nh và đ t ti n nh các lo i bi n áp chuy n m chấ ớ ồ ề ắ ề ư ạ ế ể ạ
t n s th p tr c đây.ầ ố ấ ướ
Nên ph ng án đ c đ a ra đ th c hi n b chuy n đ i g m hai khâu đóươ ượ ư ể ự ệ ộ ể ổ ồ
là :
+ Khâu tăng áp DC ( th p ) ấ DC ( cao ) v i t n s chuy n m ch caoớ ầ ố ể ạ
+ Khâu ngh ch l u DC ( cao ) ị ư AC ( cao ) v i kỹ thu t đi u bi n SPWMớ ậ ề ế
Sau đây là các ph ng pháp bi n đ iươ ế ổ :
2.1. Bi n Đ i DC ế ổ DC :
Tùy vào c u t o máy bi n áp mà chuy n đ i DC-DC cũng đ c chia thành ba ấ ạ ế ể ổ ượlo i:ạ + Flyback
+ Forward
+ Push-pull
M i lo i trên đ u có nh ng u nh c đi m khác nhau. Nên tùy theo yêu c u ỗ ạ ề ữ ư ượ ể ầc a ngu n mà ta ch n m t trong các ki u nh trên. Sau đây là nguyên t c ho t ủ ồ ọ ộ ể ư ắ ạđ ng c a t ng lo i :ộ ủ ừ ạ
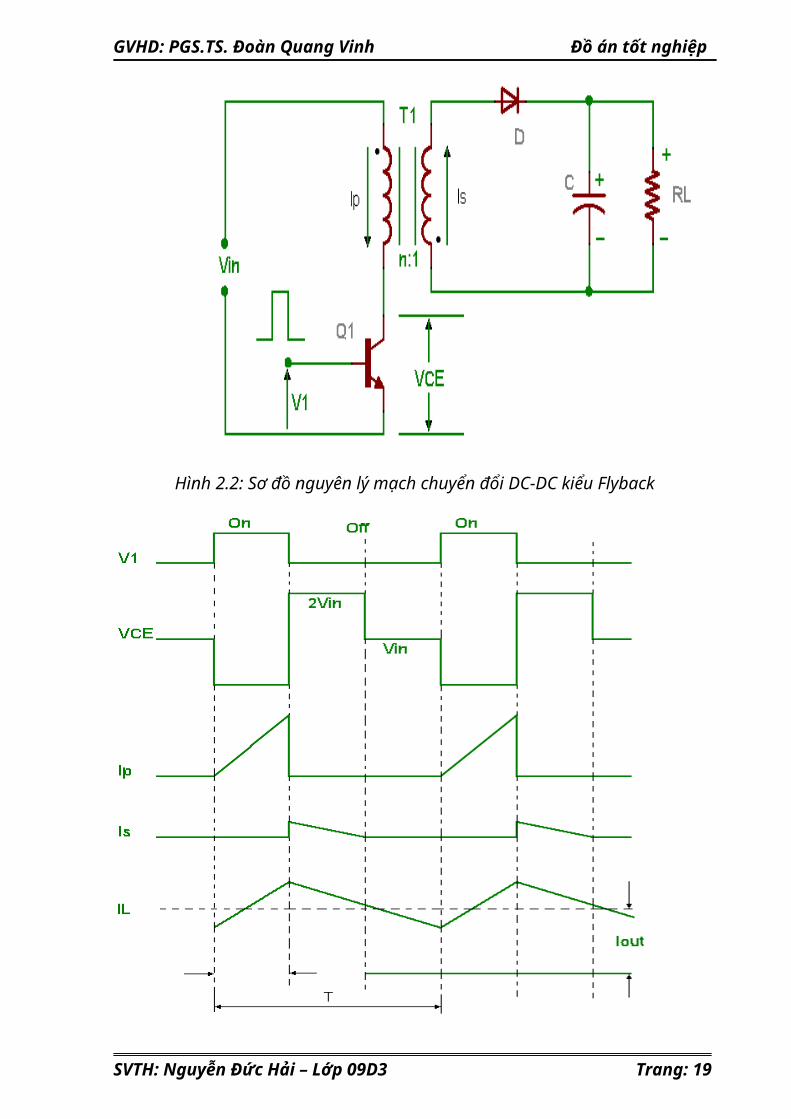
2.1.1. B chuy n đ i ki u FLYBACK ộ ể ổ ể :
S đ d ng b converter flyback cách ly và các d ng sóng ch đ n đ nh.ơ ồ ạ ộ ạ ở ế ộ ổ ị
M ch ho t đ ng nh sau: Khi transistor Qạ ạ ộ ư 1 d n, dòng đi n s c p b t đ u tăngẫ ệ ơ ấ ắ ầ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 15

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
trong cu n s c p, tích tr năng l ng. Do s b trí ng c c c tính gi a các cu nộ ơ ấ ữ ượ ự ố ượ ự ữ ộ
dây ngõ vào và ngõ ra c a bi n áp, nên không có năng l ng ra t i do diode D bủ ế ượ ả ị phân c c ng c. ự ượ Khi transistor ng ng d n, c c tính c a cu n dây đ c đ i ng c l i do tư ẫ ự ủ ộ ượ ổ ượ ạ ừ
thông gi m. Bây gi diode D d n, n p vào t C và c p dòng Iả ờ ẫ ạ ụ ấ L ra t i.ả
Đây là ki u ngu n xung truy n công su t gián ti p thông qua bi n áp. Choể ồ ề ấ ế ế
đi n áp đ u ra l n h n hay nh h n đi n áp đ u vào. T m t đ u vào có th choệ ầ ớ ơ ỏ ơ ệ ầ ừ ộ ầ ể
nhi u đi n áp đ u ra.ề ệ ầ
S đ nguyên lý nh sau :ơ ồ ư
Hình 2.2: S đ nguyên lý m ch chuy n đ i DC-DC ki u Flybackơ ồ ạ ể ổ ể
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 16

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.3: S đ d ng sóngơ ồ ạ
2.1.2. B chuy n đ i ki u FORWARDộ ể ổ ể :
Ph n t cách ly trong b converter forward là bi n áp, ph n t tích tr năngầ ử ộ ế ầ ử ữ
l ng là cu n dây L yêu c u ph i có ngõ ra đ m ch ho t đ ng t t h n và hi uượ ộ ầ ả ở ể ạ ạ ộ ố ơ ệ
su t cao h n. Dây qu n cu n s c p và th c p có cùng c c tính. Ho t đ ng c aấ ơ ấ ộ ơ ấ ứ ấ ự ạ ộ ủ
m ch nh sau: khi Qạ ư 1 d n, dòng đi n tăng d n trong cu n s c p, tích tr năngẫ ệ ầ ộ ơ ấ ữ
l ng. Vì cu n dây s c p và th c p có cùng c c tính nên năng l ng này đ cượ ộ ơ ấ ứ ấ ự ượ ượ
chuy n ra ngõ ra và đ c tích tr trong cu n L thông qua diode Dể ượ ữ ộ 2 đ c phânượ
c c thu n. Diode Dự ậ 3 phân c c ng c. Khi Qự ượ 1 ng ng d n, đi n áp trên cu n dâyư ẫ ệ ộ
bi n áp đ o chi u làm phân c c ng c Dế ả ề ự ượ 2. Bây gi diode Dờ 3 đ c phân c c thu nượ ự ậ
d n dòng đi n ngõ ra cung c p đ n t i thông qua cu n dây L.ẫ ệ ấ ế ả ộ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 17
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Cu n dây th 3 và diode Dộ ứ 1 cung c p t tr ng cho bi n áp khi Qấ ừ ườ ế 1 ng ng d n trư ẫ ả
năng l ng qua bi n áp ra ngõ ra DC.ượ ế
Hình 2.4: S đ nguyên lý m ch chuy n đ i DC-DC ki u Forwardơ ồ ạ ể ổ ể
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 18
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.5: S đ d ng sóngơ ồ ạ
2.1.3. B chuy n đ i ki u PUSH-PULLộ ể ổ ể :
B converter push-pull th t s là 2 b converter forward ghép l i và làmộ ậ ự ộ ạ
vi c ng c pha nhau. M i n a b converter push-pull cung c p công su t ra t iệ ượ ỗ ử ộ ấ ấ ả
trong n a chu kỳ. ử T d ng sóng chúng ta có th th y r ng vì có 2 b transistor chuy n m chừ ạ ể ấ ằ ộ ể ạ
và diode ngõ ra nên dòng đi n trung bình qua m i ph n đ c gi m đi m t n aệ ỗ ầ ượ ả ộ ử
so v i b converter forward. Chú ý r ng kho ng th i gian gi a hai transistor d nớ ộ ằ ả ờ ữ ẫ
thì diode D1 và D2 d n đ ng th i nên không c n ph i có diode flywheel.ẫ ồ ờ ầ ả
Hình 2.6: S đ nguyên lý m ch chuy n đ i DC-DC ki u Push-Pullơ ồ ạ ể ổ ể
Công th c tính cho ngu n Push-Pull :ứ ồ
Vout = Vin x (n2/n1) x f x (Ton1+ Ton2)
V i:ớ
Vout = Đi n áp đ u ra ệ ầ V
Vin = Đi n áp đ u vàoệ ầ V
n2 = cu n dây th c p ộ ứ ấ Vòng
n1=Cu n dây s c pộ ơ ấ Vòng
f = T n s đóng c t ầ ố ắ Hz
Ton1 = th i gian m Van Q1 ờ ở s
Ton2 = th iờ gian m Van Q2 ở s
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 19

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
M t s l u ý khi dùng ngu n đ y kéo:ộ ố ư ồ ẩ+ Trong 1 th i đi m thì không đ c c hai van Q1 và Q2 cùng d n. M i van ch ờ ể ượ ả ẫ ỗ ỉđ c d n trong 1 n a chu kì. Khi van này m thì van kia ph i đóng và ng c l iượ ẫ ử ở ả ượ ạ+ Th i gian m các van ph i chính xác, gi a 2 van c n ph i có th i gian ch t đ ờ ở ả ữ ầ ả ờ ế ểđ m b o cho hai van không d n cùng.ả ả ẫ
+Trong các d ng ngu n cách ly trên thì ngu n đ y kéo hay Push-Pullạ ồ ồ ẩ th ng t oườ ạ
đ c công su t cao h n so v i các d ng khác nh ng kém h n so v i các d ng ượ ấ ơ ớ ạ ư ơ ớ ạngu n không cách ly.ồ
Hình 2.7 : d ng sóng t ng ngạ ươ ứ
2.2.Bi n Đ i DC ế ổ AC :
M t s s đ ngh ch l u ngu n áp :ộ ố ơ ồ ị ư ồ2.2.1.S đ n a c uơ ồ ử ầ :
Ta dùng hai ti p đi m linh ki n bán d n m c theo s đ d i đâyế ể ệ ẫ ắ ơ ồ ướ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 20

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.8 : S đ ngh ch l u ngu n áp d ng n a c uơ ồ ị ư ồ ạ ữ ầ
S+ và S- luân phiên nhau d n đi n, S+ d n dòng t a qua b, S- d n dòng t b qua ẫ ệ ẫ ừ ẫ ừa.
D ng sóng đi n áp và dòng ra trên t i R ph thu c vào t i nh sau : ạ ệ ả ụ ộ ả ưBán kỳ 1 : S+ d n , S- ng ng d n Vout =Vin /2ẫ ư ẫBán kỳ 2 : S- d n , S+ ng ng d n Vout = - Vin/2 ẫ ư ẫ- u đi m c a m ch : Ư ể ủ ạ
+ Ít bóng bán d n h n so v i s đ c uẫ ơ ớ ơ ồ ầ
-Nh c đi m : ượ ể
+ Đi n áp ra có biên đ ch b ng m t n a đi n áp đ u vàoệ ộ ỉ ằ ộ ữ ệ ầ
2.2.2. S đ c uơ ồ ầ :
Các transistor T1, T3 và T2, T4 luân phiên nhau d n đi n, m i đôi d n trong ẫ ệ ỗ ẫ1 bán kỳ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 21

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.9: S đ ngh ch l u ngu n áp d ng c uơ ồ ị ư ồ ạ ầ
Bán kỳ đ u : 0 < t <T/2ầ , đôi T1 và T3 d n, T2 và T4 ng ng d n. Dòng đi n ch y ẫ ư ẫ ệ ạt A sang B.ừ
Bán kỳ sau :T < t < T/2 , đôi T2 và T4 d n, T1 và T3 ng ng d n. Dòng đi n ch y ẫ ư ẫ ệ ạt B sang A.ừ
D ng đi n áp và dòng ra có d ng t ng t nh s đ n a c u :ạ ệ ạ ươ ự ư ơ ồ ữ ầ
- u đi m c a m ch : Đi n áp đ u ra có biên đ l n nh t b ng đi n ápƯ ể ủ ạ ệ ầ ộ ớ ấ ằ ệ
đ u vàoầ
- Nh c đi m : Nhi u bóng bán d n h n so v i so đ n a c uượ ể ề ẫ ơ ớ ồ ữ ầ
Các Diod ng c m c song song v i các khóa chuy n m ch đ x dòng đi nượ ắ ớ ể ạ ể ả ệ
ng c khi các khóa chuy n m ch đang khóa.ượ ể ạ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 22

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
2.3. Kỹ thu t đi u bi n đ r ng xung ki u Sine hóa (SPWM)ậ ề ế ộ ộ ể
2.3.1. S c n thi t c a b ngh ch l u đi u bi n đ r ng xungự ầ ế ủ ộ ị ư ề ế ộ ộ :Hi n nay có r t nhi u b ngh ch l u là nh ng b ngh ch l u mà d ng sóngệ ấ ề ộ ị ư ữ ộ ị ư ạ
c a dòng đi n ho c đi n áp đ a vào b ngh ch l u là nh ng xung vuông hoànủ ệ ặ ệ ư ộ ị ư ữ
toàn ho c xung có nh y c p mà ta đ nh nghĩa chung là nh ng b ngh ch l u nh yặ ả ấ ị ữ ộ ị ư ả
c p. B ngh ch l u nh y c p lo i này có nh ng thu n l i và h n ch nh t đ nhấ ộ ị ư ả ấ ạ ữ ậ ợ ạ ế ấ ị
trong đi u khi n và d ng sóng đ u ra. Thu n l i ch y u là v n đ đi u khi n,ề ể ạ ầ ậ ợ ủ ế ấ ề ề ể
trong đi u khi n m t ch ng m c nh t đ nh, thì k t c u c a m ch đi u khi nề ể ở ộ ừ ự ấ ị ế ầ ủ ạ ề ể
t ng đ i đ n gi n, th i gian đóng c t c a van bán d n đ c c đ nh trong m tươ ố ơ ả ờ ắ ủ ẫ ượ ố ị ộ
chu kì. Ta th y c hai b ngh ch l u ngu n dòng và ngu n áp thì trong m t n aấ ở ả ộ ị ư ồ ồ ộ ử
chu kì đi n áp c b n đ u ra thì các van bán d n ch đóng c t m t l n duy nh t,ệ ơ ả ầ ẫ ỉ ắ ộ ầ ấ
có th nói r ng t n s đóng c t c a van bán d n b ng hai l n t n s c a sóng cể ằ ầ ố ắ ủ ẫ ằ ầ ầ ố ủ ơ
b n b ngh ch l u,kh năng chuy n m ch c a van bán d n yêu c u không cao,ả ộ ị ư ả ể ạ ủ ẫ ầ
do v y có th dùng cho m ch công su t l n vì các van bán d n công su t l n cóậ ể ạ ấ ớ ẫ ấ ớ
t c đ chuy n m ch th p, các van công su t càng l n thì t c đ chuy n m chố ộ ể ạ ấ ấ ớ ố ộ ể ạ
càng ch m. Bên c nh u đi m trên thì b ngh ch l u nh y c p trên b c l m tậ ạ ư ể ộ ị ư ả ấ ộ ộ ộ
s nh c đi m, nh c đi m l n nh t là kh năng sin hoá dòng đi n ho c đi nố ượ ể ượ ể ớ ấ ả ệ ặ ệ
áp không cao. Do đóng c t cung c p cho t i nh ng xung vuông nên khi t i làắ ấ ả ữ ả
đông c sẽ xu t hi n sóng hài b c cao không mong mu n. Sóng hài xu t hi n làmơ ấ ệ ậ ố ấ ệ
t n hao trong m ch tăng lên và đ tinh ch nh trong đi u khi n gi m. Khi t n sổ ạ ộ ỉ ề ể ả ầ ố
đ u ra yêu c u càng th p thì sóng hài xu t hi n càng nhi u và khi t c đ c nầ ầ ấ ấ ệ ề ố ộ ậ
không thì hai b ngh ch l u d ng này m t kh năng ki m soát t c đ , đ c bi t làộ ị ư ạ ấ ả ể ố ộ ặ ệ
b ngh ch l u ngu n dòng.ộ ị ư ồ
B ngh ch l u đi u bi n đ r ng xung ra đ i kh c ph c đ c nh c đi mộ ị ư ề ế ộ ộ ờ ắ ụ ượ ượ ể
c a hai b ngh ch l u ngu n dòng và ngu n áp trên. D ng sóng đ u ra c a bủ ộ ị ư ồ ồ ạ ầ ủ ộ
ngh ch l u đi u bi n đ r ng xung (PWM - Pulse Width Modulation) đ c đi uị ư ề ế ộ ộ ượ ề
bi n g n sin h n, thành ph n hài b c cao đ c lo i tr đ n m c t i thi u, khế ầ ơ ầ ậ ượ ạ ừ ế ứ ố ể ả
năng đi u khi n thích nghi theo m i c p đi n áp và m i t n s trong d i t n sề ể ọ ấ ệ ọ ầ ố ả ầ ố
đ nh m c. B ng ph ng pháp PWM ta có th đi u khi n đ c đ ng c thíchị ứ ằ ươ ể ề ể ượ ộ ơ
nghi theo m t đ ng đ c tính cho tr c. Nh c đi m l n nh t c a b ngh chộ ườ ặ ướ ượ ể ớ ấ ủ ộ ị
l u PWM là yêu c u van bán d n có kh năng đóng c t t n s l n. T n sư ầ ẫ ả ắ ở ầ ố ớ ầ ố
thông th ng l n h n kho n 15 l n t n s đ nh m c đ u ra c a b ngh ch l u.ườ ớ ơ ả ầ ầ ố ị ứ ầ ủ ộ ị ư
2.3.2. Nguyên lý ho t đ ng c a ngh ch l u PWMạ ộ ủ ị ư :Hai đ i l ng c n ph i quan tâm khi xem xét v PWM là: sóng mang và sóngạ ượ ầ ả ề
đi u biên.ề
+ Sóng mang: Sóng mang là sóng tam giác có t n s r t l n, có th đ n hàngầ ố ấ ớ ể ế ch c th m chí hàng trăm kHz.ụ ậ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 23

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
+ Sóng đi u biên: Sóng đi u biên là sóng hình sin có t n s b ng t n sề ề ầ ố ằ ầ ố
sóng c b n đ u ra c a b ngh ch l u. Sóng đi u biên chính là d ng sóngơ ả ầ ủ ộ ị ư ề ạ
mong mu n đ u ra c a m ch ngh ch l u.ố ở ầ ủ ạ ị ư
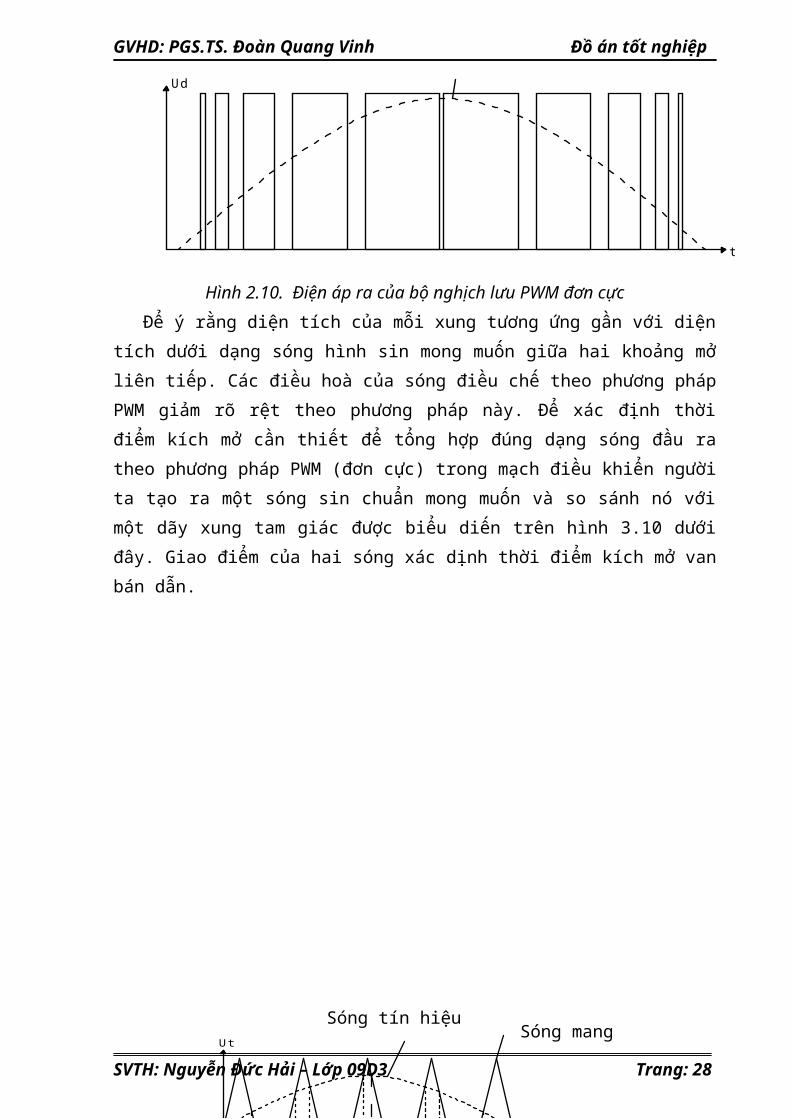
Hình sau bi u di n đi n áp đ u ra c a b ngh ch l u PWM đ n c c. Chu kìể ễ ệ ầ ủ ộ ị ư ơ ự
đóng m đ c đi u khi n sao cho b r ng xung c a các chu kì là c c đ i đ nhở ượ ề ể ề ộ ủ ự ạ ở ỉ
sóng hình sin c b n.ơ ả
t
Ud
Hình 2.10. Đi n áp ra c a b ngh ch l u PWM đ n c cệ ủ ộ ị ư ơ ựĐ ý r ng di n tích c a m i xung t ng ng g n v i di n tích d i d ngể ằ ệ ủ ỗ ươ ứ ầ ớ ệ ướ ạ
sóng hình sin mong mu n gi a hai kho ng m liên ti p. Các đi u hoà c a sóngố ữ ả ở ế ề ủ
đi u ch theo ph ng pháp PWM gi m rõ r t theo ph ng pháp này. Đ xácề ế ươ ả ệ ươ ể
đ nh th i đi m kích m c n thi t đ t ng h p đúng d ng sóng đ u ra theoị ờ ể ở ầ ế ể ổ ợ ạ ầ
ph ng pháp PWM (đ n c c) trong m ch đi u khi n ng i ta t o ra m t sóngươ ơ ự ạ ề ể ườ ạ ộ
sin chu n mong mu n và so sánh nó v i m t dãy xung tam giác đ c bi u di nẩ ố ớ ộ ượ ể ế
trên hình 3.10 d i đây. Giao đi m c a hai sóng xác d nh th i đi m kích m vanướ ể ủ ị ờ ể ở
bán d n. ẫ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 24
sóng tín hiệu

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.11. Đ th xác đ nh th i đi m kích m van.ồ ị ị ờ ể ở
Khi đi n áp đi u khi n càng gi m thì b r ng c a xung càng gi m và đệ ề ể ả ề ộ ủ ả ộ
tr ng xung càng tăng, do v y đi n áp ra gi m. Vì v y có th đi u khi n đi n ápố ậ ệ ả ậ ể ề ể ệ
đ u ra b ng đi n áp đi u khi n. ầ ằ ệ ề ể
Quá trình đ a xung có t n s cao vào sẽ t o ra đóng c t t n s l n do v y sẽư ầ ố ạ ắ ầ ố ớ ậ
làm tăng các đi u hoà b c cao. Nh ng ta có th d dàng l c ra đi u hoà b c th pề ậ ư ể ễ ọ ề ậ ấ
và t n s c b n sin h n. Bên c nh đó đ ng c là t i đi n c m nên d dàng làmầ ố ơ ả ơ ạ ộ ơ ả ệ ả ễ
suy gi m các đi u hoà b c cao c đi n áp và dòng đi n.ả ề ậ ả ệ ệ
S l n chuy n m ch nhi u trong m t chu kì sóng tam giác d n t i t n haoố ầ ể ạ ề ộ ẫ ớ ổ
đ i chi u trong thyristor c a b ngh ch l u l n. Đ ch n b ngh ch l u có sóngổ ề ủ ộ ị ư ớ ể ọ ộ ị ư
g n ch nh t ho c b ngh ch l u PWM ph i chú ý đ n giá thành b sung ph nầ ữ ậ ặ ộ ị ư ả ế ổ ầ
t chuy n m ch và t n hao chuy n m ch, song song v i đi u đó ph i tính đ nử ể ạ ổ ể ạ ớ ề ả ế
sóng c b n còn l i đ u ra.ơ ả ạ ở ầ
2.3.3. Sin hoá PWMKỹ thu t sin hoá PWM đ c ng d ng r t thông d ng trong công nghi p.ậ ượ ứ ụ ấ ụ ệ
Hình 3.11 trình bày nguyên lý c b n c a PWM, trong đó m t sóng mang chu nơ ả ủ ộ ẩ
hình tam giác đ c so sánh v i thành ph n t n s c b n c a sóng đi u bi nượ ớ ầ ầ ố ơ ả ủ ề ế
hình sin, đi m giao c t c a chúng đánh d u đi m chuy n m ch c a các ph n tể ắ ủ ấ ể ể ạ ủ ầ ử
bán d n công su t. Nh ng lo t xung vuông bi n đ i đ u ra b ngh ch l u đ cẫ ấ ữ ạ ế ổ ở ầ ộ ị ư ượ
đi u bi n thành hình sin và d ng sóng bao g m m t thành ph n c b n c a t nề ế ạ ồ ộ ầ ơ ả ủ ầ
s đi u bi n. Biên đ c a các thành ph n c b n có th thay đ i khi t n s vàố ề ế ộ ủ ầ ơ ả ể ổ ầ ố
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 25
t
Ut
Ud
t
Sóng tín hiệuSóng mang
MOSFET cao dẫnMOSFET thấp dẫn

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
đi n áp c a sóng đi u bi n thay đ i. X lý chu i Fourier c a sóng đi n áp đ u raệ ủ ề ế ổ ử ỗ ủ ệ ầ
khá ph c t p, nh ng có th trình bày theo công th c sau :ứ ạ ư ể ứ
) ( 3.1)
m : h s đi u bi n.ệ ố ề ế
s
: t n s sóng c b n( t n s đi u bi n).ầ ố ơ ả ầ ố ề ế
: góc l ch pha đ u ra, ph thu c vào đ d ng c a sóng đ u Ф ệ ầ ụ ộ ộ ươ ủ ầra.
H s đi u bi n đ c đ nh nghĩa là :ệ ố ề ế ượ ị
T
P
VV
m (3.2)
VP: là biên đ c a sóng đi u bi nộ ủ ề ế
VT: là biên đ c a sóng mang.ộ ủ
Lý t ng thì m có th bi n đ i trong kho ng 0 và 1 thì có th cho ta quan hưở ể ế ổ ả ể ệ
tuy n tính gi a đi n áp đi u t n và đi n áp đ u ra. Khi giá tr m = 0 thì đi n ápế ữ ệ ề ầ ệ ầ ị ệ
đ u ra các xung hình vuông đ i x ng v i các kho ng tr ng. Kho ng tr ng đ cầ ố ứ ớ ả ố ả ố ượ
đ nh nghĩa là kho ng th i gian khoá c a ph n t chuy n m ch.Khi giá tr m ti nị ả ờ ủ ầ ử ể ạ ị ế
d n t i 1, đ r ng c a kho ng tr ng g n gi a c a n a chu kì sóng hình sin gi mầ ớ ộ ộ ủ ả ố ầ ữ ủ ử ả
d n, đ r ng c a xung đi n áp tăng d n. Khi s v n hành c a b ngh ch l uầ ộ ộ ủ ệ ầ ự ậ ủ ộ ị ư
hoàn h o, đ r ng xung và kho ng tr ng đ t t i giá tr nh nh t đ c duy trìả ộ ộ ả ố ạ ớ ị ỏ ấ ượ
cho chuy n m ch và ph c h i đóng c t. Cũng gi ng nh v y, kho ng th i gianể ạ ụ ồ ắ ố ư ậ ả ờ
tr đóng c t nh nh t cũng đ c yêu c u đ i v i quá trình đóng m gi a haiễ ắ ỏ ấ ượ ầ ố ớ ở ữ
ph n t đóng c t cao và th p khi c hai ph n t này cùng khoá. Kho ng th i gianầ ử ắ ấ ả ầ ử ả ờ
này đ a ra đ lo i tr kh năng ng n m ch van do quá trình trùng d n.ư ể ạ ừ ả ắ ạ ẫ
D ng sóng đ u ra c a PWM bao g m thành ph n sóng hài có t n s sóngạ ầ ủ ồ ầ ầ ố
mang và sóng hài b c cao t n s d i t n sóng đi u bi n.T n s góc c a sóng hàiậ ầ ố ả ầ ề ế ầ ố ủ
có th tính theo công th c :ể ứ (3.3)
c - t n s sóng mang.ầ ố
h - t n s sóng đi u bi n.ầ ố ề ế M, N là nh ng s nguyên và M+N là m t s l .ữ ố ộ ố ẻ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 26
sch N

cont
trif f
fm
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
2.3.4. Nguyên t c ho t đ ng b ngh ch l u c u đi u bi n đ r ng xung đ nắ ạ ộ ộ ị ư ầ ề ế ộ ộ ơ c cự
B ngh ch l u PWM đ n c c ( hay còn g i là b khu ch đ i chuy n m ch)ộ ị ư ơ ự ọ ộ ế ạ ể ạ
khu ch đ i có hi u qu tín hi u đ u vào Vế ạ ệ ả ệ ầ cont. Đi n áp đ u ra cung c p cho t i làệ ầ ấ ả
+VDC , -VDC. Tùy thu c vào khi nào Vộ cont, -Vcont l n h n hay nh h n sóng tam giácớ ơ ỏ ơ
đ t Vặ tri .Đi n áp đ u ra c a t i có d ng c a Vệ ầ ủ ả ạ ủ cont, và các sóng hài b c cao tùy thu cậ ộ
vào h s đi u ch mệ ố ề ế f. đây, mỞ f là t s gi a t n s sóng đi u ch tam giác vàỉ ố ữ ầ ố ề ế
sóng sin đ t. ặ
Nguyên t c c a b khu ch đ i là s so sánh gi a giá tr ±Vắ ủ ộ ế ạ ự ữ ị cont v i sóng ớtam giác Vtri .Nguyên t c này đ c minh h a trong hình sau:ắ ượ ọ
VCont VTri -VContU
t
Hình 2.12: Mô t d ng sóng đi u biên và sóng tam giácả ạ ề
Hình trên minh h a v i mọ ớ a =0.9 v i mớ a là t s biên đ c a sóng đi u khi n vàỉ ố ộ ủ ề ể
biên đ sóng đi u bi n.ộ ề ế
Nguyên t c đ ho t đ ng c a 4 khóa c a b ngh ch l u c u ( hình 3.12)ắ ể ạ ộ ủ ủ ộ ị ư ầ
đ c th c hiên nh sau:ượ ự ư
Vcon>Vtri, đóng công t c Aắ +, m công t c Aở ắ - , vì th điên áp t i a là Vế ạ a= +Vdc
Vcon<Vtri, m công t c Aở ắ +, đóng công t c Aắ - , vì th điên áp t i a là Vế ạ a= -Vdc
-Vcon>Vtri, đóng công t c Bắ +, m công t c Bở ắ -, vì th điên áp t i b là Vế ạ b= +Vd
-Vcon<Vtri, m công t c Bở ắ +, đóng công t c Bắ -, vì th điên áp t i b là Vế ạ b= -Vdc
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 27
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
A+ B+
+Vdc
A- B-Va
Vb
a b
Hình 2.13: S đ c u ngh ch l u Hơ ồ ầ ị ư
Các Diod ng c m c song song v i các khóa chuy n m ch đ x dòng đi n ượ ắ ớ ể ạ ể ả ệng c khi các khóa chuy n m ch đang khóa. ượ ể ạ
D ng áp ra c a b ngh ch l u c u đ c th hi n nh hình sau:ạ ủ ộ ị ư ầ ượ ể ệ ư
U
t
Hình 2.14: Áp ra trên t i ( Vả tai=Va -Vb) v i mớ a=0
Sóng ra trên t i bao g m sóng c b n và sóng hài b c cao v i d i t n sả ồ ơ ả ậ ớ ả ầ ố
ftri±fcont, 2ftri ± 3fcont , 2ftri ± 5fcont và các sóng khác v i k=1,2,3... ớ
đây fỞ tri là t n s sóng tam giác, fầ ố cont là t n s sóng đi u khi n. D ng áp raầ ố ề ể ạ
c a t i đ c th hi n trên hình 3.14 v i mủ ả ượ ể ệ ớ a= 0.5 và hình 3.15 v i mớ a=1,5.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 28

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
1.5
1
0.5
0
-0.5
-1
-1.5
1.51.5
1
0.5
0
-0.5
-1
-1.5
U
t
t
Hình 2.15: Áp ra trên t i ( Vả t iả= Va –Vb) khi ma=0.5
1.510.5
0-0.5-1
-1.5-2
2
1.510.5
0-0.5-1
-1.5-2
2
U
t
t
Hình 2.16: Áp ra trên t i( Vả tai=Va-Vb) khi ma=1.5
T hình 3.14 và 3.15 ta th y khi h s mừ ấ ệ ố a tăng lên, đ r ng c a xung điên ộ ộ ủáp ra c a t i tăng lên v chi u r ng và do đó tr hi u d ng đi n áp t i cũng ủ ả ề ề ộ ị ệ ụ ệ ảtăng lên.
Freqyency ma = 0.2 ma = 0.4 ma = 0.6 ma = 0.8 ma = 1
fcont 0.200 0.400 0.600 0.800 1.000
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 29

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
2ftri ± fcont 0.190 0.326 0.370 0.314 0.181
2ftri ± 3fcont 0.024 0.071 0.139 0.212
2ftri ± 5fcont 0.013 0.033
4ftri ± fcont 0.163 0.157 0.008 0.105 0.068
4ftri ± 3fcont 0.012 0.070 0.132 0.115 0.009
4ftri ± 5fcont 0.034 0.084 0.119
4ftri ± 7fcont 0.017 0.050
B ng 2.2 H s đi n áp hi u d ng c a các sóng hài v i các h s ma khác ả ệ ố ệ ệ ụ ủ ớ ệ ốnhau.
V i 2fớ tri >> fcont
Qua b ng trên ta th y sóng đi n áp trên t i g m các sóng đi n áp c b n cóả ấ ệ ả ồ ệ ơ ả
t n s b ng t n s sóng đi u khi n Vcont, và các sóng hài b c cao có t n sầ ố ằ ầ ố ề ể ậ ầ ố
,...52,32, conttriconttriconttri ffffff
Khi ma <=1, tr hi u d ng đi n áp các sóng hài đ c tính b ng công th c sau: ị ệ ụ ệ ượ ằ ứ
2dc
iRMSiV
kV (3.4)
Hình 3.16 th hi n tr hi u d ng c a các thành ph n đi n áp c b n có t nể ệ ị ệ ụ ủ ầ ệ ơ ả ầ
s fố cont khi thay đ i h s đi u ch mổ ệ ố ề ế a. Qua đó ta th y r ng, giá tr hi u d ng c aấ ằ ị ệ ụ ủ
thành ph n c b n n m trong 3 vùng: ầ ơ ả ằ
+ Trong đo n tuy n tính ( mạ ế a <=1): tr hi u d ng c a thành ph n c b n tị ệ ụ ủ ầ ơ ả ỉ l v i mệ ớ a theo công th c:ứ
V RMScont
=ma
V DC
√2 (3.5)
+ Đo n quá đi u ch ( mạ ề ế a >1): tr hi u d ng thành ph n c b n tăng lênị ệ ụ ầ ơ ả
khi ma tăng lên nh ng không tuy n tính v i ma.ư ế ớ
+ Đo n b o hòa ( mạ ả a >1): tr hi u d ng thành ph n c b n không tăng lênị ệ ụ ầ ơ ả
n a m c dù tăng mử ặ a lên.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 30

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.17: Tr hi u d ng c a thành ph n đi n áp c b n khi thay đ i h s đi uị ệ ụ ủ ầ ệ ơ ả ổ ệ ố ề
ch mế a
2.4.Ph ng Án Thi t Kươ ế ế :
T các mô hình t ng quan các ph ng pháp bi n đ i trên, chúng ta ch nừ ổ ươ ế ổ ọ
ph ng pháp thi t k b chuy n đ i đi n t ngu n đi n m t chi u c a dàn pinươ ế ế ộ ể ổ ệ ừ ồ ệ ộ ề ủ
m t tr i (24VDC) sang ngu n đi n xoay chi u 220VAC t n s 50Hz có c u trúcặ ờ ồ ệ ề ầ ố ấ
nh sau:ư
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 31
V dc
2
4π
.V dc
2
V1rms
ma

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 2.18: S đ c u trúc t ng quát b chuy n đ i sẽ thi t kơ ồ ấ ổ ộ ể ổ ế ế
V i ph n tăng áp DC-DC ki u Push-Pull, đi n áp ớ ầ ể ệ 15VDC đ c tăng đ nượ ế
340VDC cho ph n ngh ch l u.Ki u Push-Pull đ c l a ch n vì cho hi u su t caoầ ị ư ể ượ ự ọ ệ ấ
h n các ki u chuy n đ i khác.Bên c nh đó, vi c s d ng t n s chuy n m chơ ể ể ổ ạ ệ ử ụ ầ ố ể ạ
trên 27KHz cho ki u này còn gi m nh kh i l ng thi t k máy bi n áp, nênể ả ẹ ố ượ ế ế ế
hi u su t càng l n.Đi n áp xoay chi u đ u ra sẽ d n đ nh h n vì có thêm khâuệ ấ ớ ệ ề ầ ễ ổ ị ơ
n đ nh đi n áp phía m t chi u.ổ ị ệ ộ ề
Ph n ngh ch l u DC-AC chúng ta s d ng s đ c u cho 2 c p bán d n m cầ ị ư ử ụ ơ ồ ầ ặ ẫ ắ
theo ki u c u H.V i c u trúc ki u này chúng ta d dàng ng d ng ph ng phápể ầ ớ ấ ể ễ ứ ụ ươ
đi u bi n đ r ng xung ki u Sin hóa.Cho d ng sóng đi n áp đ u ra ít sóng hàiề ế ộ ộ ể ạ ệ ầ
b c cao.Và có th d dàng n đ nh đi n áp đ u ra b ng khâu ph n h i kín.ậ ể ễ ổ ị ệ ầ ằ ả ồ
Cu i cùng, đ đi u khi n m i ho t đ ng cho toàn b h th ng trên c n ph iố ể ề ể ọ ạ ộ ộ ệ ố ầ ả
có vi đi u khi n có đ y đ các ch c năng x lý m nh.Có kh năng x lý các tínề ể ầ ủ ứ ử ạ ả ử
hi u s l n tín hi u t ng t .Chúng ta có th ch n dòng vi đi u khi n PIC c aệ ố ẫ ệ ươ ự ể ọ ề ể ủ
hãng MICROCHIP vì chúng t ng đ i ph bi n trên th tr ng, có các ch c năngươ ố ổ ế ị ườ ứ
đ y đ cho yêu c u đi u khi n.Và các công c h tr l p trình m nh và dầ ủ ầ ề ể ụ ổ ợ ậ ạ ễ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 32

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
dàng.Ch ng sau sẽ khái quát v ch c năng c a vi đi u khi n ươ ề ứ ủ ề ể PIC 18f4431, m tộ
lo i vi đi u khi n chuyên d ng cho đi u khi n đ ng c xoay chi u m t pha vàạ ề ể ụ ề ể ộ ơ ề ộ
ba pha.Mà đây chúng ta c n ch c năng SPWM chuyên nghi p và t c đ x lýở ầ ứ ệ ố ộ ử
ADC nhanh m nh c a nó.ạ ủ
K t lu n ch ng 2ế ậ ươ
Ch ng 2 đ a ra s đ h th ng năng l ng phong đi n, lý thuy t v hòaươ ư ơ ồ ệ ố ượ ệ ế ề đ ng b h th ng phong đi nồ ộ ệ ố ệ n i l i, thi t k m ch đ ng l c h th ng phongố ướ ế ế ạ ộ ự ệ ố đi nệ n i l i bao g mố ướ ồ :
- S đ kh i m ch đ ng l c;ơ ồ ố ạ ộ ự- Các thông s kỹ thu t c a m ch đ ng l c;ố ậ ủ ạ ộ ự- Thi t k các b chuy n đ i DC-DC, DC-AC.ế ế ộ ể ổ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 33

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
CH NG ƯƠ 3: T NG QUAN V C U TRÚC VÀ CH C NĂNG C AỔ Ề Ấ Ứ Ủ
VI ĐI U KHI N PIC 18F4431Ề Ể
3.1. Gi i thi u chung :ớ ệ3.1.1. Nh ngữ đặc điểm nổi b cậ PIC18F4431:
14 bit Power Control PWM module:
+ Có đến 4 kênh ( mỗi kênh g mồ 1 c pặ xung đ iố nghịch)
+ Th iờ gian dead time linh ho tạ
+ Update t ngừ duty cycle => ngõ ra PWM đáp ứng nhanh
Motion Feedback Module:
+ Có 3 kênh capture độc lập:
- Các chế độ hoạt đ nộ g linh ho tạ cho vi cệ đo đ cạ độ rộng xung
- Module hỗ trợ Hall Sensor
- Special event trigger cho các module khác
+ Quadrature Encorder interface:
- 2 pha vào và 1 ngõ vào index từ encorder
- Hỗ trợ đo đ cạ v nậ tốc
High speed, 200Ksps 10-bit A/D Converter:
+ Có 9 kênh A/D
+ 2 kênh lấy m uẫ t cứ th iờ
+ Lấy mẫu liên tục:1 ; 2 hay 4 kênh được lựa chọn
Flexible Oscillator Structure:
+ 4 chế độ thạch anh ( hỗ trợ đ nế 40 MHz)
+ 2 ngu nồ xung lock ngoài lên đến 40 MHz
+ Chế độ th chạ anh n iộ :
- Có 8 tần số người dùng có thể l aự ch nọ : từ 31Khz -> 8 MHz
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 34

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
- OCTUNE có thể bù cho sự lệch t nầ số.
Peripheral Highlights:
+ Ch uị dòng cao : sink/source ( 25mA/25ma)
+ 3 ngu nồ ng tắ ngoài
+ 2 module Capture / Compare / PWM (CCP)
- Capture 16 bit, độ phân giải t iố đa 6.25 ns ( TCY/6)
- Compare 16 bit, độ phân giải t iố đa 100 ns ( TCY)
- PWM output: độ phân giải từ 1 -> 10 bít
+ Module USART:
- Hỗ trợ RS-485, RS-232 và LIN1.2
- Auto weak-up on start bit
- Auto-Bound detect
+ RS-232 sử dụng kh iố dao động n iộ ( ko c nầ thạch anh ngoài)
3.1.2. Nh ngữ đặc điểm chính:
+ Là CPU sử dụng t pậ lệnh RISC và có tốc độ xử lý cao , công su tấ
thấp nhờ sử dụng công nghệ CMOS FLASH/EEPROM.
+ Tập lệnh có 75 lệnh .
+ M tộ chu kỳ lệnh bằng 4 chu kỳ xung . Sử dụng bộ dao động 40 Mhz
thì chu kỳ lệnh là 0,1 us .
+ Tần số bộ dao động cho phép t iớ 40Mhz.
+ 8K x 14 word bộ nhớ FLASH l pậ trình.
+ 768 byte bộ nhớ RAM , trong đó bộ nhớ EEPROM lên đ nế 256
byte.
+ Trang bị t iớ 34 ngắt với 8 cấp độ ng tắ
+ 5 port I / O.
+ Trang bị 3 bộ định thời: 2 bộ 8 bit,1 bộ 16 bit.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 35

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
+2 module Capture/Compare/PWM.
+Bộ chuyển đ iổ 10 bit ADC v iớ t cố độ 5-10us.
+ C ngổ serial đồng bộ v iớ chế độ SPI(Master) và I2C (Master/Slave)
th cự hi n ệ b ngằ phần c ngứ .
+ Chế độ chuy nể nhận đồng bộ/bất đ ngồ bộ với 9 bit đ aị chỉ kiểm tra.
+ Cổng song song (PSP) 8bit .
+ Các chế độ định đ aị chỉ:tr cự ti pế , gián ti pế , và tương đối.
+ Cho phép đọc/ghi bộ nhớ chương trình .
+ Có chế độ b oả vệ mã l pậ trình .
+ Chế độ SLEEP(t mạ ngh )ỉ để tiết ki mệ điện năng .
+ Cho phép ch nọ lựa chế độ dao đ ngộ ( n iộ , ngoại ).
+ 2 chân cho phép gỡ rối ho tạ đ ngộ của vi đi uề khi n.ể
+ L pậ trình thông qua cổng serial với đi nệ thế chỉ 5 V.
+ Tầm đi nệ thế hoạt động rộng: từ 2 đ nế 5.5V. Dòng c pấ khoảng
25mA.
+ Đ cượ s nả xuất với nhiều loại khác nhau cho cùng 1 mã vi đi uề
khi n,ể tuỳ thuộc vào số tính năng đ cượ trang b ị thêm . Các ki u ể đế
c m:PDIP(40 ắ chân), PLCC và QFP (cùng 44 chân).
3.2. Tóm T t C u Trúc Ph n C ngắ ấ ầ ứ :
3.2.1. Sơ đồ chân MCU PIC18F4431 :
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 36

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.1 S đ chân Pic 18f4431ơ ồ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 37

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
3.2.2. Sơ đồ các kh iố chức năng :
Hình3.2 S đ kh i các ch c năngơ ồ ố ứ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 38

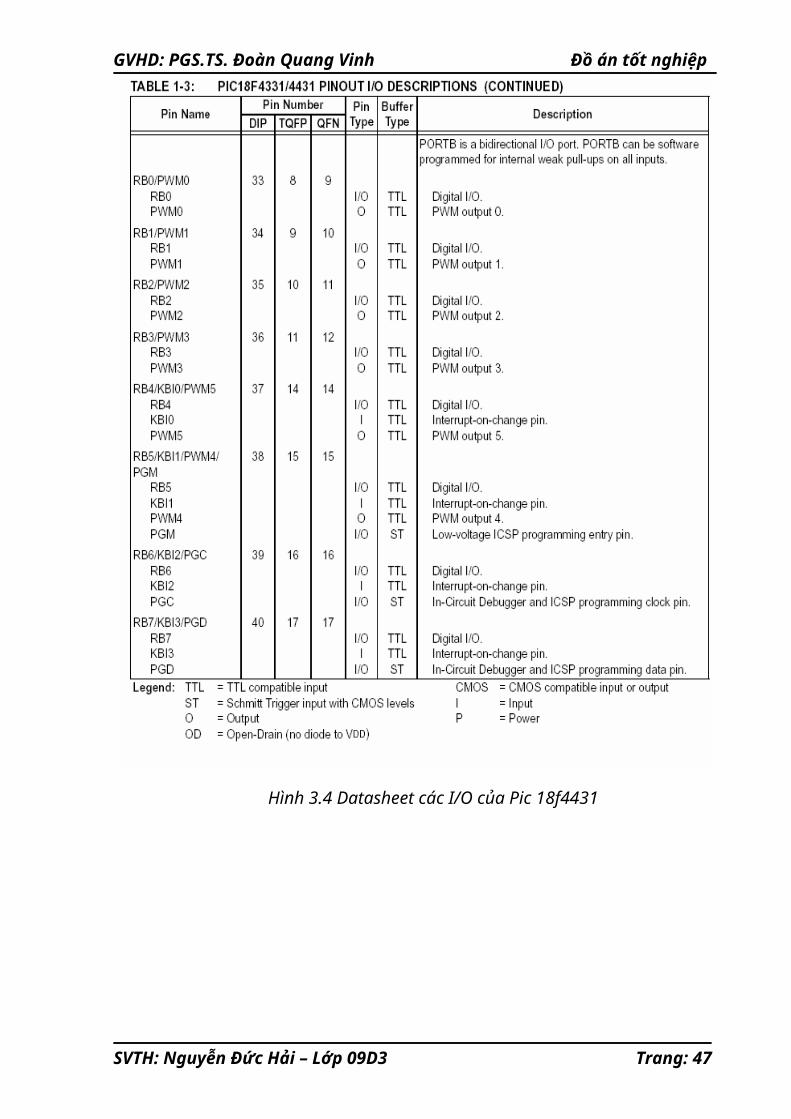
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 3.2.3. Chức năng c aủ t ngừ chân:
3.2.3.1. PORT A:
+ Là port I/O . Có t tấ cả 6 chân, từ RA0 đ nế RA5.Trong đó RA2 và RA3 có
thể dùng ti pế nh nậ điện áp Vref+ và Vref-.
+ RA4 còn là ngõ vào xung clock cho Timer0. RA5 có thể làm chân ch nọ
slave cho port serial đồng b .ộ
3.2.3.2. PORT B:
+ Là port I/O ,có thể đ cượ l pậ trình bởi phần m mề để làm ch cứ năng kéo
lên cho t tấ cả ngõ vào.
+ RB0 có thể làm chân ngắt ngoài.
+ RB3 có thể làm ngõ vào l pậ trình điện thế thấp.
+ Các chân còn lại có thể làm ngõ vào ngắt trên chân,lập trình với xung và
dữ
li uệ serial.
3.2.3.3. PORT C:
+ Là port I/O, có 8 chân:
+ RC0 dùng làm ngõ ra bộ dao động Timer1 hoặc ngõ vào xung timer1.
+ RC1 ,RC2 có cùng 3 ch cứ năng: làm ngõ ra PWM / chân Compare( so
sánh) / chân capture (l yấ mẫu).RC1 còn là ngõ vào bộ dao đ nộ g Timer1.
+ RC3 là ngõ vào xung tuần tự đ ngồ b /ộ hoặc ra (v iớ chế độ SPI và I2C).
+ RC4 làm chân nhận data (chế độ SPI) hay data I/O (chế độ I2C).
+ RC5 có thể xu tấ data SPI ( chế độ SPI).
+ RC6 có thể làm chân phát b tấ đ ngồ bộ (USART) ho cặ xung đồng bộ.
3.2.3.4. PORT D:
+ Là port I/O ,có thể làm port slave song song khi giao tiếp với 1 bus vi xử
lý.
3.2.3.5. PORT E:
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 39

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + Port I/O này th ngườ dùng đi uề khi nể chọn/đọc/ghi cho port slave song
song.
3.2.3.6. Các chân khác:
+ Chân 13(OSC1/CLKIN) tiếp nhận xung ngoài cho bộ dao đ nộ g th chạ
anh bên trong.
+ Chân 14(OSC2/CLKOUT) làm ngõ ra bộ dao đ ngộ thạch anh.Ở chế độ
RC,chân này có t nầ số b ngằ ¼ của OSC1.
+ Chân 1 : làm ngõ vào reset .
+ Chân 12, 31 là n iố đất Vss.Chân 11, 32 là chân cấp nguồn Vdd.
Mô tả các I/O trích từ datasheet :
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 40

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.3 Datasheet các I/O c a Pic 18f4431ủ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 41

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.4 Datasheet các I/O c a Pic 18f4431ủ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 42

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.5 Datasheet các I/O c a Pic 18f4431ủ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 43

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 3.3. Module PWM Chuyên D ng ụ :
3.3.1. Power control PWM module :
Power Control PWM module đ nơ gi nả là t oạ ra nhi uề xung đồng bộ có độ
rộng thay đổi đư cợ ( PWM : Pulse Width Modulation ). Các ngõ ra PWM ứng
dụng trong điều khi nể đ ngộ cơ và các ứng dụng chuyển đ iổ công suất . Module
PWM này hỗ tr ợ điều khi nể các ngứ dụng sau :
+ Đ nộ g c ơ KĐB 1 pha và 3 pha
+ Swithched Reluctance Motor
+Đ nộ g cơ DC không chổi than
+ UPS ( Uninterruptible Power Suppliers)
+ Mutiple DC Brush motor
- Các thông số cơ bản c aủ module PWM:
+ Có 8 ngõ I/O PWM với 4 duty cycle khác nhau
+ Độ phân giải 14 bit dựa trên PWM periode
+ Thời gian dead time có thể lập trình ( ngứ dụng trong trường PWM đ i ốnghịch => chống trùng dẫn )
+ Ng tắ hỗ trợ update không đối( asymmertrical update ) xứng trong ch ếđộ canh gi aữ ( center aligned mode)
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 44

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp - Sơ đồ kh iố c aủ module PWM
Hình 3.6 S đ kh i Modul PWMơ ồ ố
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 45

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.7 S đ kh i các ki u PWMơ ồ ố ể
Trong module PWM có 4 bộ tạo duty cycle riêng bi t,ệ chúng đ cượ đánh số từ
0-> 3. Module này có 8 ngõ ra, được đánh số từ 0->7. Trong chế độ đối ngh chị các
pin ch nẳ – pin lẻ là 1 c p.ặ Ví d :ụ PWM0 sẽ đối ngh chị v iớ PWM1; PWM2 sẽ đối
nghịch v i ớ PWM3; ….
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 46
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Bộ tạo dead time sẽ chèn 1 khoản “ off” gi aữ lúc xung PWM của pin này đang
cạnh xu ngố và xung PWM của chân đ iố ngh chị đang đang ở c nhạ lên ( trong 1
c pặ chân đ iố nghịch). Điều này ngăn chặn trùng d nẫ => các khóa công su tấ
đ cượ b oả vệ
3.3.2. Các thanh ghi đi uề khiển:Ho tạ động c aủ module PWM đ cượ điều khi nể thông qua 22 thanh ghi khác
nhau. 8 trong số đó được dùng để đi uề ch nhỉ các thông số của module:
+ PWM timer control register 0 ( PTCON0)
+ PWM timer control register 1 ( PTCON1)
+ PWM control register 0 ( PWCON0)
+ PWM control register 1 ( PWCON1)
+ Dead time control register (DTCON)
+ Output overide register(OVDCOND)
+ Output state register (OVDCONS)
+ Fault configrration register (FLTCONFIG)
7 c pặ ( 14 thanh ghi) còn lại : hiệu ch nhỉ thông số đặc biệt:
+ PWM time base registers (PTMRH and PTMRL)
+ PWM periode registers (PTPERH and PTPERL)
+ PWM special event compare register ( SEVTCMPH and SEVTCMPL)
+ PWM duty cycle #0 register ( PDC0H and PDC0L)
+ PWM duty cycle #1 register ( PDC1H and PDC1L)
+ PWM duty cycle #2 register ( PDC2H and PDC2L)
+ PWM duty cycle #3 register ( PDC3H and PDC3L) Những cặp thanh ghi
trên đều double buffers
- Các module chức năng:
PWM module hỗ trợ nhi uề chế độ ho tạ động phù h pợ cho yêu c uầ điều
khiển động c .ơ PWM module được tổng hợp từ các khối ch cứ năng sau:
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 47

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + PWM Time Base
+ PWM Time Base Interrrupts
+ PWM Period
+ PWM Duty Cycle
+ Dead Time Generators
+ PWM Output Overrides
+ PWM Fault Inputs
+ PWM Special Event Trigger
3.3.3. PWM Time Base:PWM time base đ cượ cung c p ấ 12 bit timer v iớ ch cứ năng prescaler and
postcaler. Sơ đồ kh iố đ nơ gi nả của PWM time base đ cượ trình bày trong hình
17-4. PWM time base đ cượ hiệu chỉnh thông qua 2 thanh ghi PTCON0 và
PTCON1. Time base đ c ượ enabled hay disabled b iở set hay clear bit PTEN
trong thanh ghi PTCON1 . Chú ý, c pặ thanh ghi PTMR ( PTMRH:PTMRL) sẽ
không bị clear khi bit PTEN bị clear trong phần m mề .
Hình 3.8 S đ ch c năng kh i Time Baseơ ồ ứ ố
PWM time base có 4 chế độ ho tạ đ ngộ như sau
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 48

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + Free running mode => edge aligned PWM
+ Single shot mode => center aligned PWM
+ Continous Up/Down count mode => support electronically commtated
motors
+ Continous Up/Down count mode with interrupts for double updates
4 chế độ trên đ cượ lựa ch nọ thông qua bit PTMOD1:PTMOD0 trong thanh
ghi
PTCON0.
Hình 3.9 Thanh ghi đi u khi n PTCONề ể
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang: 49

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.10 Thanh ghi đi u khi n PWMCONề ể
3.3.4 PWM Time Base Interrrupts:PWM timer tạo ra interrupts d aự trên chế độ ho tạ đ ngộ đ cượ lựa ch nọ b i ở
nh ngữ bit PTMOD<1:0> và nh nữ g bit postscaler<3:0>
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 50

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp - Interrupts trong chế độ FREE RUNNING:
PWM time base ở chế độ time base ( PTMOD<1:0>=00 ), sự ki nệ interrupts x yả
ra khi giá tr trongị thanh ghi PTPER bằng giá tr cị ủa thanh ghi PTMR. Giá tr ị c aủ
thanh ghi PTMR sẽ đ cượ được đ aư về zero ngay xung clock sau đó.
Sử dụng postscaler l nớ hơn 1:1 sẽ gi mả tần số của các sự ki nệ interrupts .
Hình 3.11 Interrupts trong ch đ FREE RUNNINGế ộ
- Interrupts trong chế độ SINGLE SHOT:
Khi bit PTMOD<1:0>=01 =>PWM time base chở ế độ single shot. Sự kiện
interrupts xảy ra khi giá tr trị ong thanh ghi PTPER bằng giá tr c aị ủ thanh ghi
PTMR. Giá tr ị của thanh ghi PTMR sẽ đư cợ đư cợ đ aư về zero ngay xung clock
sau đó.
Những bit postscaler ko có tác d ngụ gì khi timer ở chế độ này.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 51

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.12 Interrupts trong ch đ SINGLE SHOTế ộ
- Interrupts trong chế độ COUNTINOUS UP/DOWN COUTING:
Khi bit PTMOD<1:0>=10 =>PWM time base ở chế độ countinous up/down
counting. Sự ki nệ interrupts x yả ra khi giá trị trong thanh ghi PTMR b ngằ zero,
và PWM time base b tắ đầu đ mế lên .
Những bit l aự chọn postscaler có thể sử dụng trong chế độ này của timer
để làm giảm t nầ số của sự kiện interrupts .
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 52

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.13 Interrupts trong ch đ COUNTINOUS UP/DOWN COUTINGế ộ
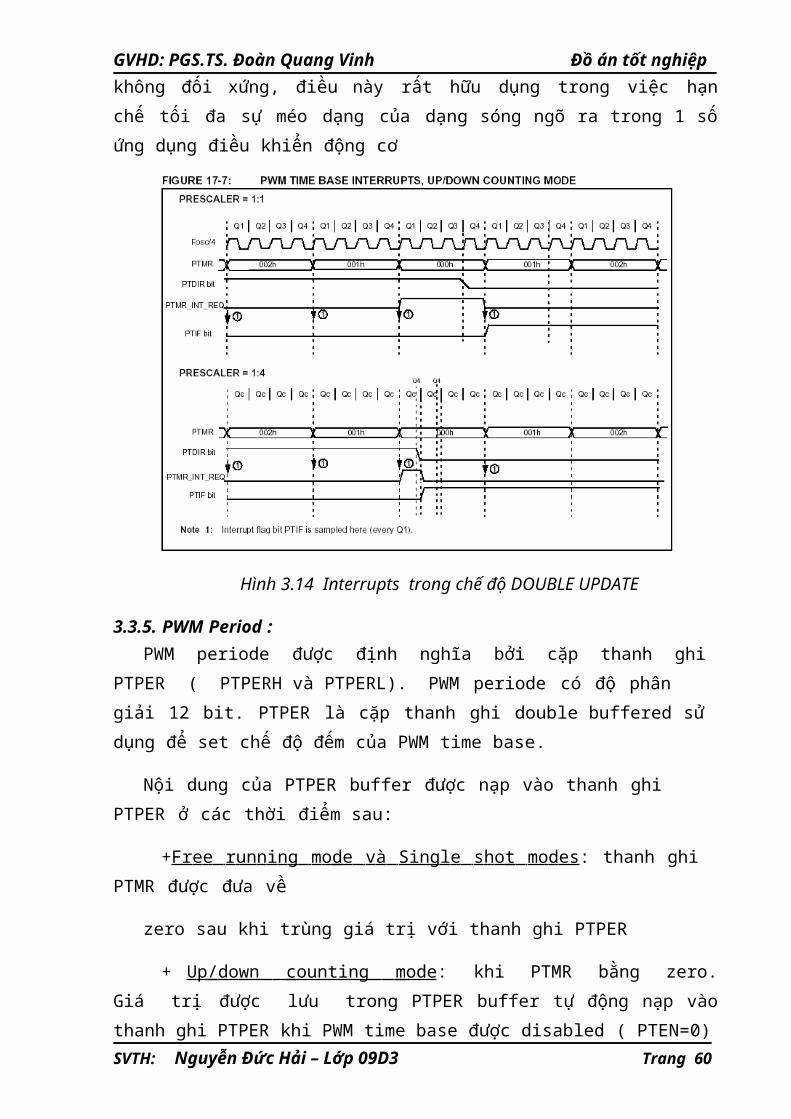
- Interrupts trong chế độ DOUBLE UPDATE:
Chế độ này chỉ có trong Up/Down Counting mode ( PTMOD<1:0>=11 ). Sự
kiện interrupts xảy ra m iỗ khi giá tr ị thanh ghi PTMR tương đ ngươ v iớ zero hay
khi giá tr ị thanh ghi PTMR trùng với giá trị thanh ghi PTPER.
Chế độ double update cung cấp cho người dùng thêm 2 ch cứ năng trong
ch ế độ center-align mode:
+ Bandwidth có độ lớn g pấ đôi vì PWM duty cycle đư cợ update 2
l n ầ trong m iỗ chu kỳ (periode)
+ Có thể t oạ ra đ cượ d nạ g sóng PWM center-align không đ iố x ng,ứ
điều này r tấ hữu dụng trong vi cệ h nạ chế t iố đa sự méo dạng của dạng
sóng ngõ ra trong 1 số ngứ dụng đi uề khiển động cơ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 53

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.14 Interrupts trong ch đ DOUBLE UPDATEế ộ
3.3.5. PWM Period :PWM periode đ c ượ đ nị h nghĩa b i ở cặp thanh ghi PTPER ( PTPERH và
PTPERL). PWM periode có độ phân gi iả 12 bit. PTPER là cặp thanh ghi
double buffered sử dụng để set chế độ đ mế c aủ PWM time base.
Nội dung c aủ PTPER buffer được nạp vào thanh ghi PTPER ở các thời
đi m sau:ể
+Fr e e r un n i n g m o d e v à Sing l e s h o t mo d es : thanh ghi PTMR được đ aư
về
zero sau khi trùng giá trị với thanh ghi PTPER
+ U p / d o wn count i ng m ode : khi PTMR bằng zero. Giá trị đ c ượ lưu
trong PTPER buffer t ự động nạp vào thanh ghi PTPER khi PWM time base được
disabled ( PTEN=0)
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 54

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.15 Thanh ghi Period trong 2 ki uể
3.3.6 PWM duty cycle:PWM duty cycle đ cượ xác định b iở các thanh ghi PDCx ( PDCxH và PDCxL).
Có tổng c nộ g 4 cặp thanh ghi PWM duty cycle cho 4 cặp xung PWM.
+ PDC0 (PDC0L và PDC0H)
+ PDC1 (PDC1L và PDC1H)
+ PDC2 (PDC2L và PDC2H)
+ PDC3 (PDC3L và PDC3H)
Giá trị trong mỗi thanh ghi xác định khoản thời gian mà ngõ ra PWM đó
tích c c.ự
Trong chế độ Edge-aligned, PWM periode b tắ đầu tại Q1 và k tế thúc khi
thanh
ghi duty cycle trùng v iớ giá trị PTMR.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 55

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 3.16 Thanh ghi đ r ng xung Dutyộ ộ
- Duty cycle register buffer:4 thanh ghi PWM duty cycle đều đ cượ double
buffered. Mỗi duty cycle block, đều có thanh ghi duty clycle buffer mà có thể truy
xuất b iở ngư iờ dùng. Thang ghi duty cycle buffer thứ hai sẽ giữ giá trị so sánh
với PWM periode hiện tại.
Trong chế độ edge-aligned PWM output, giá trị duty cycle mới sẽ đ cượ
update m i ỗ khi giá trị thai thanh ghi PTMR và PTPER trùng nhau. Sau đó PTMR
sẽ đư cợ reset như trong hình 17-12. N iộ dung của duty cycle buffer sẽ tự động
c pậ nh tậ vào thanh ghi duty cycle khi PWM time base bị disable ( PTEN=0)
Hình 3.17 Đ u ra modul PWM ch đ ầ ở ế ộ edge-aligned
Khi PWM time base cở hế độ Up/Down couting, giá trị duty cycle m iớ sẽ
đ c ượ update khi giá tr thanhị ghi PTMR b ngằ zero và PWM time base b t ắ đầu
đếm lên. Nội dung c aủ duty cycle buffer sẽ tự động cập nhật vào thanh ghi
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 56

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp duty cycle khi PWM time base bị disable ( PTEN=0). Hình 17-13 trình bày gi nả
đồ thời gian khi duty cycle đ cượ update ở chế độ Up/Down counting . Trong
chế độ này PWM periode phải đ cượ sẵn sàng để nạp và tính toán tr cướ
PWM duty cycle m iớ trư cớ khi các thay đ iổ có hi uệ l c.ự
Hình 3.18 Đ u ra modul PWM ch đ Up/Down coutingầ ở ế ộ
Khi PWM time base cở hế độ Up/Down couting v iơ double update mode, giá
tr ị duty cycle m iớ sẽ đư cợ update khi giá trị thanh ghi PTMR bằng zero và khi giá
tr ị hai thanh ghi PTMR và PTPER trùng nhau. N iộ dung c aủ duty cycle buffer
sẽ tự đ ng ộ đ cượ n pạ vào thanh ghi duty cycle khi một trong hai đi uề kiện trên
x yả ra.
Hình 3.19 Đ u ra modul PWM ch đ edge-aligned Up/Down couting ầ ở ế ộ với
double update mode
3.3.7. Bộ t oạ thời gian dead time:Trong bộ bi nế t nầ , khi các xung PWM ở chế độ đ iố ngh chị để đi uề khi nể
các khóa công suất phía cao; phía thấp trong cùng 1 nhánh, ph iả chèn 1 khoản
thời gian dead time. Khoản th iờ gian dead time đó làm cho ngõ ra PWM đối
nghịch đ uề ở tr ngạ thái không tác động trong 1 kho nả th iờ gian ngắn=>
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 57

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp tránh trùng d nẫ khi khóa này đang ON , khóa kia đang OFF
M iỗ cặp xung PWM đ iố nghịch đều có một counter 6 bit đếm xuống, để
chèn khoản dead time vào xung PWM. Mỗi bộ t oạ dead time có bộ phát hi nệ
c nhạ lên và c nhạ xuống đư cợ k tế n iố v iơ bộ so sánh duty cycle. Dead time
đ cượ nạp vào timer khi phát hiện PWM ở cạnh lên hay cạnh xuống. Tùy vào
xung PWM đang c nhở ạ lên hay cạnh xuống, mà 1 kho nả thời gian chuy nể tiếp
đ cượ làm trễ cho đến khi timer đ mế về zero.
Hình 3.20 S đ kh i t o th i gian ch t Dead Timeơ ồ ố ạ ờ ế
Hình 3.21 Bi u đ th i gian khi chèn Dead Timeể ồ ờ
- Thanh ghi DTCON:
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 58

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Hình 3.22 Thanh ghi đi u khi n t o Dead Timeề ể ạ
Bảng tóm t tắ các thanh ghi có liên quan của POWER CONTROL PWM MODULE :
Hình 3.23 B ng tóm t t các thanh ghi có liên quan c a PWM MODULEả ắ ủ
3.3.8 Analog to digital converter module (A/D):Bộ A/D có 5 ngõ vào cho PIC 28 chân và 8 cho các PIC khác . Tín hi uệ analog
đ cượ l yấ m uẫ và giữ b iở tụ đi nệ , sau đó đưa vào bộ chuy nể đổi . Bộ này tạo ra
1 kết quả số tương ngứ . Giá trị này là 1 số 10 bit.
Bộ A /D có ngõ vào so sánh áp cao và th pấ ,và có thể l aự chọn thông qua
k t ế h pợ Vdd , Vss , RA2 hay RA3. Bộ A/D có điểm đ cặ biệt là có thể hoạt động
trong khi vi đi uề khi nể ở tr ngạ thái SLEEP . Để làm đ cượ đi uề này , xung clock
A/D phải đ c ượ nhận từ bộ dao động RC nội của bộ A/D.
Module A/D có 9 thanh ghi :
+ A/D Result High Register (ADRESH)
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 59
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + A/D Result Low Register (ADRESL)
+A/D Control Register0 (ADCON0)
+ A/D Control Register1 (ADCON1)
+ A/D Control Register2 (ADCON2)
+ A/D Control Register3 (ADCON3)
+ A/D chennel Select Register (ADCHS)
+ Analog I/O Select Register 0 ( ANSEL0)
+ Analog I/O Select Register 1 ( ANSEL1) Sơ đồ kh iố bộ A/D :
Hình 3.24 Sơ đồ kh iố bộ A/D
Các b cướ sau để làm vi cệ với bộ A/D :
1_Thi tế l pậ bộ A/D :
+ Thi tế l pậ các chân analog / so sánh áp và I/O số ( ADCON1 ) .
+ Ch nọ kênh ngõ vào A/D (ADCONO).
+ Ch nọ xung clock bộ A/D ( ADCONO).
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 60

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + Kích hoạt A/D ( ADCONO ).
2_Thi tế l pậ ngắt A/D n uế sử dụng
+ xoá bit ADIF.
+ Set bit ADIE.
+ set bit PEIE
+ set bit GIE
3_Chờ th iờ gian đáp nứ g c nầ thi t.ế
4_B tắ đ uầ chuyển đổi : set bit ADCONO<2>.
5_Chờ chuyển đ iổ A/D hoàn thành bằng cách hỏi vòng bit ADCONO<2> có bị xoá chưa hay chờ ng tắ A/D
6_Đọc k tế quả từ cặp thanh ghi ADRESH : ADRESL , xoá bit ADIF n uế cần .
7_L pặ lại từ b cướ 1 hay 2 n uế có yêu cầu. Th iờ gian chuyển đổi A/D mỗi bit
gọi là TAD .
Một khoảng chờ tối thi uể 2TAD đ c ượ yêu cầu tr cướ khi lần đáp ứng kế
ti pế bắt đầu.
Hình 3.25 Thanh ghi ch a k t qu chuy n đ i A/Dứ ế ả ể ổ
Các thanh ghi ADRESH : ADRESL ch aứ 10 bit k tế quả của chuy nể đ iổ
A/D . Khi sự chuyển đổi A/D hoàn t tấ , kết quả đưa vào cặp thanh ghi này ,
bit ADCON0
<2> bị xoá và cờ ngắt ADIF được set. C pặ thanh ghi này rộng 16 bit . Do đó
n uế bit ADFM =1 :lấy 10 bit bean phải và ADFM = 0 thì lấy 10 bit bên trái , SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 61

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp các bit còn lại bằng 0. N uế A/D bị vô hiệu , các thanh ghi này có thể dùng nh ư
2 thanh ghi đa mục đích.
CH NG 4 : THI T K PH N C NG CHO H TH NG PHONG ĐI NƯƠ Ế Ế Ầ Ứ Ệ Ố Ệ
4.1 Thi t K Kh i Bi n Đ i DC-DC:ế ế ố ế ổ
Hình 4.1: S đ nguyên lý t ng DC-DCơ ồ ầ
- Kh i DC-DC bi n đi n áp ố ế ệ t 14.5V ừ DC t ngu n ừ ồ gió sang 350VDC ph c v ụ ụcho b ngh ch l uộ ị ư
- C u trúc m ch theo ki u Push-Pull (hi u su t cao nh t), v i t n s chuy nấ ạ ể ệ ấ ấ ớ ầ ố ể
m ch cao ạ 27KHz. M ch bao g m 2 bóng MOSFET làm nhi m v thay nhau đóngạ ồ ệ ụ
c t liên t c, bi n áp xung tăng áp, ch nh l u c u b ng diode xung, b l c LC ắ ụ ế ỉ ư ầ ằ ộ ọ ở
đ u ra.ầ
Đi n áp phía ra b tăng áp DC-DC là:ệ ộ
(V)
Trong đó : - đi n áp đ u vàoệ ầ
- đi n áp đ u raệ ầ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 62

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
: t s vòng dây cu n th c p và s c pỉ ố ộ ứ ấ ơ ấ
: t n s chuy n m ch (đóng c t Mosfet)ầ ố ể ạ ắ
: th i gian m 2 Mosfetờ ở
- Các b c thi t k :ướ ế ế
Ch n MOSFETọ Ch n máy bi n ápọ ế B l c LC ộ ọ M ch đi u khi n và b o vạ ề ể ả ệ
4.1.1. Ch n MOSFETọ :
Ch n MOSFET c n ph i cân nh c:ọ ầ ả ắ
Đi n áp đánh th ng l n nh t ệ ủ ớ ấ
Dòng đi n đ nh ệ ỉ4.1.1.1. Đi n áp đánh th ng c c đ i:ệ ủ ự ạ
(V)
4.1.1.2. Dòng đi n đ nh :ệ ỉDòng đi n d n trung bình c c đ i:ệ ẫ ự ạ
(A)
d : đ r ng xung l n nh t (ộ ộ ớ ấ x p x 0,47ấ ỉ )
Hình 4.2 D ng sóng dòng đi n trong cu n dây máy bi n ápạ ệ ộ ế
T các thông s trên ta ch n lo i MOSFETừ ố ọ ạ IRFP064N đ c gép song song ượ ,
có các thông s sau:ốSVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 63

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Đi n áp ch u đ ng khi khóa Vệ ị ự DSS = 55V
Dòng đi n đ nh m c khi d n Iệ ị ứ ẫ D=110A
Đi n tr n i khi d n Rệ ở ộ ẫ DS(on)=8,0mΩ
Đi n áp ng ng chuy n t d n sang khóa Vệ ưỡ ể ừ ẫ GS(th) 4 đ n ế 10 (V).
Đ tr t khóa sang d n tộ ể ừ ẫ d(on)=14nS
Đ tr t d n sang khóa tộ ể ừ ẫ d(off)=43nS.
4.1.2. Thi t k máy bi n áp :ế ế ếTa có b ng ả 4.1 thông s c a b bi n đ i DC-DC:ố ủ ộ ế ổ
THÔNG SỐ GHI CHÚ GIÁ TRỊ Đ N VƠ Ị
Pin Công su t đ u vàoấ ầ 600 W
Vi_minĐi n áp đ u vàoệ ầ
nh nh tỏ ấ10 V
Vi_nomĐi n áp đ u vàoệ ầ
bình th ngườ14,5 V
Vi_maxĐi n áp đ u vào c cệ ầ ự
đ iạ15 V
Vout Đi n áp đ uệ ầ ra 350 V
Iout Dòng đi n đ u raệ ầ 1,71 A
fsT n s chuy nầ ố ể
m chạ27 kHZ
BmM t đ t thông c cậ ộ ừ ự
đ iạ1,3 T
ᶯ Hi u su tệ ấ 0,8
Ku H s gôngệ ố 0,4
VdĐi n áp r i trên di-ệ ơ
t ch nh l uố ỉ ư1 V
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 64

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
DmaxĐ r ng xung c cộ ộ ự
đ iạ0,47
– Công su t bi u ki n c a máy bi n áp c n thi t k :ấ ể ế ủ ế ầ ế ế
(VA)
– H s đi n t :ệ ố ệ ừ
1,45.4,442.500002.1,32.10-4 = 3620
Kf=4,44 : h s d ng sóngệ ố ạ
– H s hình h c c a lõi :ệ ố ọ ủ
cm5
=0,15 h s hi u ch nhệ ố ệ ỉ
4.1.2.1. Ch n lõi bi n áp có thông s th a mãn theo công th c sau :ọ ế ố ỏ ứ
B ng 4.2: Ta ch n lõi bi n áp xung ả ọ ế E55/28/21 có các thông s sau :ố
l/AΣ le Ae Amin Ve AL g
mm–1 mm mm2 mm2 mm3 nH mm
0.35 124 354 351 43900 5800 0.5
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 65

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 4.3 Thông s lõi bi n áp xungố ế
4.1.2.2. S vòng dây qu n cu n s c p : ố ấ ộ ơ ấ
(vòng)
Ta ch n s vòng cu n s c p t i thi u là 2 vòng.D i đi u ki n ho t đ ng ọ ố ộ ơ ấ ố ể ướ ề ệ ạ ộbình th ng, dòng đi n qua dây d n là 50A, ch n m t đ dòng đi n trong dây ườ ệ ẫ ọ ậ ộ ệqu n là ấ .Ti t di n dây qu n c n ch n là :ế ệ ấ ầ ọ
mm2
Có đ ng kính : dườ 1= 3 mm
Ch n 3 dây 1 lõi v i d ng kính m i lõi là 1,2 mm.ọ ớ ườ ỗ
Đ t c m cu n dây s c p :ộ ự ả ộ ơ ấ
4.1.2.3. S vòng dây qu n cu n th c p : ố ấ ộ ứ ấ
(vòng)
Ch n m t đ dòng đi n trong dây qu n là ọ ậ ộ ệ ấ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 66

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Ti t di n dây qu n c n ch n là :ế ệ ấ ầ ọ
mm2
Có đ ng kính : dườ 2= 0,8 mm
Ch n dây 1 lõi v i đ ng kính lõi 0,8 mmọ ớ ườ
4.1.2.4. M ch ch nh l u:ạ ỉ ưĐi n áp Uệ dc = 350 V. Ch nh l u phía th c p bi n áp xung ta ch n ch nh l u ỉ ư ứ ấ ế ọ ỉ ư
c u, do đó đi n áp tr c ch nh l u là:ầ ệ ướ ỉ ư
Uthứ=Udc/0,9 = 350/0,9 = 389V ( h s ch nh l u c u diode Kệ ố ỉ ư ầ clc= 0,9)
Dòng đi n làm vi c c a c u ch nh l u:ệ ệ ủ ầ ỉ ư
Ilv = P/U = 600/350= 1,71 A
Ch n diode v i Kọ ớ u = 1,5, Ki =1,4 là h s d tr đi n áp và dòng đi n, ta có:ệ ố ự ữ ệ ệ
Đi n áp ng c: Uệ ượ nv >= KuUlv = 1,5.389 = 583 V
Dòng đi n làm vi c: Iệ ệ F >= Ki.Ilv = 1,4.1,71 = 2,39 A
Ch n diode ch nh l u là lo i diode xung, v i th i gian ph c h i nh .ọ ỉ ư ạ ớ ờ ụ ồ ỏ
Ta ch n lo i diode RHRP8120, th a mãn v i các thông s sau:ọ ạ ỏ ớ ố
IF(AV) 8.0A
vRRM 400V and 600v
trr 70ns
VF 3.2V
TJ max 175C
B ng 4.3 B ng Thông s c a Diode RHRP8120ả ả ố ủ
4.1.3. B l c đ u ra LC :ộ ọ ầ
Ch n t l c đ u vào C1 :ọ ụ ọ ầM c đích đ làm m m đ nh p nhô c a đi n áp đ u vào c p b i dàn pinụ ể ề ộ ấ ủ ệ ầ ấ ở
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 67

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
T l c ph i th a mãn : ụ ọ ả ỏ
: dao đ ng đi n áp đ u vào kho ng 1% ộ ệ ầ ả
Ch n b l c đ u ra:ọ ộ ọ ầ
Cu n c m ộ ả (mH)
Ta ch n L = 0,4(mHọ )
V i ớ : dao đ ng dòng, kho ng 10% dòng raộ ả
Đi n dung ệ =
Ta ch n C = 660µFọ
4.1.4. M ch đi u khi n và b o vạ ề ể ả ệ :
4.1.4.1. Gi i thi u v IC ớ ệ ề SG3525 :
SG 3525 là IC chuyên d ng cho vi c đi u khi n các khóa chuy n m ch công ụ ệ ề ể ể ạsu t. IC này có ch c năng đ a tín hi u PWM ra 2 chân đ đóng c t các khóa ấ ứ ư ệ ể ắchuy n m ch công su t, đ ng th i nó có kh năng n áp giá tr hi u d ng c a ể ạ ấ ồ ờ ả ổ ị ệ ụ ủđ u ra t i m t giá tr c th b ng tín hi u ph n h i áp v chân INV.ầ ạ ộ ị ụ ể ằ ệ ả ồ ề
Hình 4.4: hình dáng bên ngoài SG 3525
4.1.4.2. Ch c năng các chân.ứChân 15: ngu n cung c p cho IC, 12V.ồ ấ
Chân 16 : là chân đ đ t đi n áp chu n so sánh (5,1V) v i đi n áp ph n h iể ặ ệ ẩ ớ ệ ả ồ
v t bên ngoài n i vào chân COMP( chân 9).ề ừ ố
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 68

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Chân 14: xung PWM đ u ra th nh t OUTA, n i qua đi n tr Ro1 đ h nầ ứ ấ ố ệ ở ể ạ
dòng.
Chân 11: xung PWM đ u ra th nh t OUTB, n i qua đi n tr R02 đ h nầ ứ ấ ố ệ ở ể ạ
dòng.
Chân 10 : n i v i tín hi u Shutdown tích c c m c “1” đ vô hi u hóa xung raố ớ ệ ự ứ ể ệ
PWM
Chân 8: n i đ t qua t Css nh m t o quá trình kh i đ ng làm vi c cho ICố ấ ụ ằ ạ ở ộ ệ
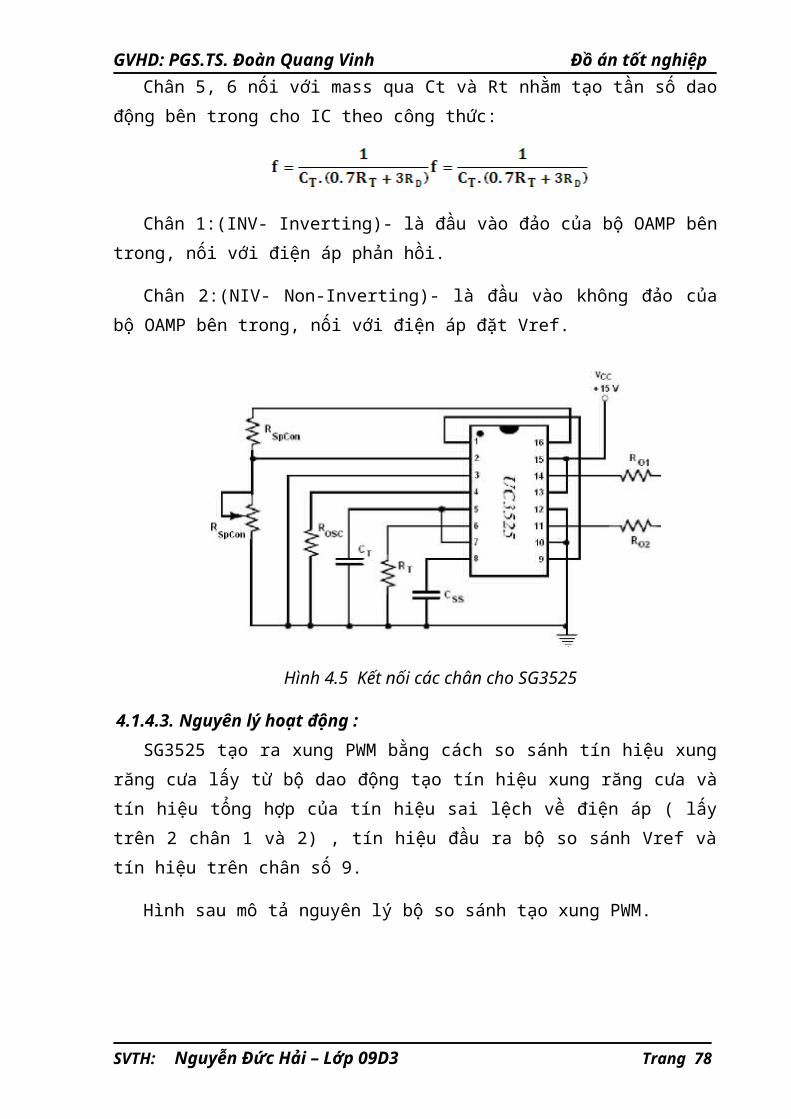
đ c thu n l i.ượ ậ ợ
Chân 5, 6 n i v i mass qua Ct và Rt nh m t o t n s dao đ ng bên trong choố ớ ằ ạ ầ ố ộ
IC theo công th c:ứ
Chân 1:(INV- Inverting)- là đ u vào đ o c a b OAMP bên trong, n i v i đi nầ ả ủ ộ ố ớ ệ
áp ph n h i.ả ồ
Chân 2:(NIV- Non-Inverting)- là đ u vào không đ o c a b OAMP bên trong,ầ ả ủ ộ
n i v i đi n áp đ t Vref.ố ớ ệ ặ
Hình 4.5 K t n i các chân cho SG3525ế ố
4.1.4.3. Nguyên lý ho t đ ngạ ộ :
SG3525 t o ra xung PWM b ng cách so sánh tín hi u xung răng c a l y t bạ ằ ệ ư ấ ừ ộ
dao đ ng t o tín hi u xung răng c a và tín hi u t ng h p c a tín hi u sai l ch vộ ạ ệ ư ệ ổ ợ ủ ệ ệ ề
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 69

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp đi n áp ( l y trên 2 chân 1 và 2) , tín hi u đ u ra b so sánh Vref và tín hi u trênệ ấ ệ ầ ộ ệ
chân s 9.ố
Hình sau mô t nguyên lý b so sánh t o xung PWM.ả ộ ạ
Hình 4.6 Nguyên lý t o xung PWMạ
S đ kh i b t o dao đ ng xung tam giác:ơ ồ ố ộ ạ ộ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 70

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 4.7 S đ kh i b t o dao đ ng xung tam giácơ ồ ố ộ ạ ộ
Ta có ph ng trình liên h gi a dòng đi n qua t và đi n áp đ t lên t :ươ ệ ữ ệ ụ ệ ặ ụ
dtdvCi t
tt
Suy ra:
)(3,3144,7
14)1.5(max VVV
)(1
2//144.72//14.1,5min V
kkkkkV
Quá trình dao đ ng đi n áp trên t t o ra xung răng c a. Thay đ i giá trộ ệ ụ ạ ư ổ ị Ct và Rt sẽ làm thay đ i th i gian n p đi n, thay đ i giá tr Rd sẽ làm thay đ iổ ờ ạ ệ ổ ị ổ
th i gian x , t đó làm thay đ i chu kỳ xung PWM.ờ ả ừ ổ
Tín hi u so sánh s sai l ch đ t trên chân 1 và 2 qua b khu ch đ i t o tínệ ự ệ ặ ộ ế ạ ạ
hi u sai l ch g(m)(vệ ệ 2-v1) đ u ra b này n i v i tín hi u trên chân 9.ầ ộ ố ớ ệ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 71
t
tt
Ci
dtdv

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 4.8 M ch khu ch đ i tín hi u sai l chạ ế ạ ệ ệ
Lúc này đ khu ch đ i tín hi u sai l ch là: gmZ(s) và Z(S) là đ l i v s sai ộ ế ạ ệ ệ ộ ợ ề ựkhác đi n áp.ệ
KA3525 có giá tr v đ l i ít nh t là 1000( 60dB). Giá tr Duty Cycle thay đ i ị ề ộ ợ ấ ị ổkhi thay đ i đ u vào đ t trên chân s 1 ho c 2.ổ ầ ặ ố ặ
Hình 4.9 Nguyên lý t o xung Push-Pull đ u ra c a KA3525ạ ầ ủ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 72

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp D ng áp ra b khu ch đ i áp 1 chi uạ ộ ế ạ ề
DTsTs
+340V-340V
+340V
Dien ap ra cua bo khuech dai
Dien ap ra thu cap MBA xung
Dau ra kenh B
Dau ra kenh A
Đau ra bo tao chu ky xung
Hình 4.10 D ng đi n áp ra c a b khu ch đ iạ ệ ủ ộ ế ạ
Hình 4.11 S đ m ch IC SG3525ơ ồ ạ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 73

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 4.2. Thi t ế K ế Kh i ố Bi n ế Đ i DC-AC :ổ
Hình 4.12 S đ kh i ngh ch l u DC-ACơ ồ ố ị ưCh n s đ ngh ch l u d ng c u H, t n s chuy n m ch 2ọ ơ ồ ị ư ạ ầ ầ ố ể ạ 0kHz, có chèn
Deadtime đ tránh ng n m ch m i nhánh c uể ắ ạ ỗ ầ
-Các b c thi t k :ướ ế ế
Ch n ọ MOSFET
M ch lái MOSFETạ B l c LC ộ ọ M ch đ ng phaạ ồ M ch đi u khi n và b o vạ ề ể ả ệ
4.2.1. Ch n thi t b bán d n đóng c t m ch ngh ch l uọ ế ị ẫ ắ ạ ị ư :
M t s u nh c đi m c a BJT, MOSFET và ộ ố ư ượ ể ủ IGBT:
BJT (Bipolar Junction Transistor): Tranzito l ng c c công su t d n dòngưỡ ự ấ ẫ
đi n theo m t chi u khi có dòng baz thích h p. Dòng đi n đ nh m c t 0,5-ệ ộ ề ơ ợ ệ ị ứ ừ500A và có th l n h n. Đi n áp đ nh m c t 30-1200V. Th i gian chuy n m chể ớ ơ ệ ị ứ ừ ờ ể ạ
ch m, t 0,5-100 uS. Ch c năng ch y u là bi n đ i DC-DC. Ph i h p v i diodeậ ừ ứ ủ ế ế ổ ố ợ ớ
trong các b ngh ch l u. Ngày nay nó đ c thay th b ng FET và MOSFET. ộ ị ư ượ ế ằ
Tranzito hi u ng tr ng FET (Field Effect Transisitor): D n dòng đi n mángệ ứ ườ ẫ ệ
khi đ t đi n áp c ng thích h p. Các FET công su t h u h t là MOSFET, có n iặ ệ ổ ợ ấ ầ ế ố
song song m t diode ng c. Dòng đi n đ nh m c t 1-100 A. Đi n áp t 30-1000ộ ượ ệ ị ứ ừ ệ ừ
V. Th i gian chuy n m ch r t nhanh t 50-200 nS. Ch y u dùng đ bi n đ iờ ể ạ ấ ừ ủ ế ể ế ổ
DC-DC và ngh ch l u.ị ư
Tranzito l ng c c c ng cách ly ưỡ ự ổ IGBT (Insualate Gate Bipolar Transistor): Là
lo i FET đ c bi t có ch c năng c a BJT và đ c đi u khi n c ng b ng FET. ạ ặ ệ ứ ủ ượ ề ể ổ ằ IGBT
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 74

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp nhanh h n và d dàng s d ng h n BJT cùng công su t. Dòng đi n đ nh m c tơ ễ ử ụ ơ ấ ệ ị ứ ừ
10-600 A. Đi n áp đ nh m c t 600-1700 V. ệ ị ứ ừ IGBT đ c s d ng h u h t trongượ ử ụ ầ ế
các b ngh ch l u có công su t l n h n 1kW. ộ ị ư ấ ớ ơ
V i công su t thi t k c a b inverter là 1000W, ta ch n van đóng c t là ớ ấ ế ế ủ ộ ọ ắMOSFET. Sử d ng c u H v i 4 van MOSFET.ụ ầ ớ
Hình 4.13: S đ c u ngh ch l u m t pha.ơ ồ ầ ị ư ộ
Các MOSFET đ c đi u khi n b ng các module PWM t chip vi đi u khi n ượ ề ể ằ ừ ề ểPIC 18F4331.
K t n i l n l t nh sau:ế ố ầ ượ ư
PWM1 đi u khi n MOSFETề ể A+
PWM0 đi u khi n MOSFET A-ề ể PWM3 đi u khi n MOSFET B+ề ể PWM2 đi u khi n MOSFET B-ề ể
Ch n van có đi n áp ng c ch u đ ng theo công th c:ọ ệ ượ ị ự ứ
kdtU : là h s d tr đi n áp, th ng ch n l n h n 1,6. ệ ố ự ữ ệ ườ ọ ớ ơ
Ta l y ấ kdtU = 2.
Ulv = 340 V
Suy ra: Unv = 2.340 = 680 V
Dòng đi n t c th i c c đ i ch y qua m i van là:ệ ứ ờ ự ạ ạ ỗ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 75
A+ B+
+Vdc
A- B-Va
Vb
a b
lvdtUnv UkU .

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp S d ng ph ng pháp làm mát b ng cánh t n nhi t đ di n tích b m t, cho ử ụ ươ ằ ả ệ ủ ệ ề ặ
phép van làm vi c t i 40%Iđm, ta ch n 20%Iđm, t c h s an toàn dòng đi n là:ệ ớ ọ ứ ệ ố ệ
Ki = 1/0,2 = 5.
Suy ra: Iđmv = 5.Imax = 14,7 A.
C n ch n van có:ầ ọ
Unv >= 680V
Iđm >= 14,7 A
Ch n van MOSFET lo i: ọ ạ IRFP460. Nhà s n xu t: Fairchild Semiconductor. ả ấTra datasheet ta có: Unv = 500V
Iđm = 20A
Rds=0.27ohm
4.2.2.M ch lái MOSFET :ạCác MOSFET phía cao có c c S n i v i ph t i, do đó đi n th c c S c aự ố ớ ụ ả ệ ế ự ủ
MOSFET phía cao là đi n th th n i, đ ng th i các c c S này không n i chungệ ế ả ổ ồ ờ ự ố
xu ng mass gi ng nh MOSFET phía th p đ c, nên vi c đi u khi n các MOSFETố ố ư ấ ượ ệ ề ể
phía cao ph i có m ch đi u khi n khác so v i MOSFET phía th p. Hi n nay vi cả ạ ề ể ớ ấ ệ ệ
đi u khi n c u MOSFET đã có m t s IC chuyên d ng nh : IR21xx, TPL250…ề ể ầ ộ ố ụ ư
Ch n IC là IR2110 có s n trên th tr ng, s n xu t b i International Rectifier. ọ ẵ ị ườ ả ấ ở Các
IC này có các ch c năng nh : khu ch đ i đ u vào PWM (0-5VDC) t vi đi uứ ư ế ạ ầ ừ ề
khi n PIC18F4331 lên đi n áp 12VDC đ kích m các MOSFET theo yêu c u. Cácể ệ ể ở ầ
thông s chi ti t tham kh o trong datasheet.ố ế ả
– Gi i thi u IC lái IR211ớ ệ 0
Hình 4.14 Hình d ng bên ngoài IR2113ạ
IR2110 đ c đóng v 14 chân, trong đó ch s d ng 11 chân. Mô t ch cượ ỏ ỉ ử ụ ả ứ
năng các chân:
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 76

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp B ng 4.3: B ng mô t các chân c a ả ả ả ủ ir2113
Chân Ch c năngứ
VDD Cung c p đi n áp logic.ấ ệ
HIN Đ u vào logic đi u khi n van phía cao (HO)ầ ề ể
SD Đ u vào đi u khi n t t (=1)hay b t (=0 ho c đ ầ ề ể ắ ậ ặ ểh ) chip.ở
LIN Đ u vào logic đi u khi n van phía th p (LO).ầ ề ể ấ
VSS Đ t tín hi uấ ệ
VB Đi n áp th n i phía cao.ệ ả ổ
HO Đi u khi n van phía caoề ể
LO Đi u khi n van phía th pề ể ấ
VS Ph n h i đi n áp c c S c a van phía cao.ả ồ ệ ự ủ
VCC Ngu n cung c p.ồ ấ
COM Ph n h i đi n áp c c S c a van phía th pả ồ ệ ự ủ ấ
S đ các kh i ch c năng bên trong:ơ ồ ố ứ
Hình 4.15 S đ các kh i ch c năng bên trong IR2113ơ ồ ố ứ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 77
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Cách n i IR2113 v i m ch ngh ch l u c u:ố ớ ạ ị ư ầ
Hình 4.16: K t n i IR2110 v i MOSFET phía cao và phía th pế ố ớ ấ
Ta s d ng 2 IC này đ đi u khi n 4 MOSFET. M i IC đi u khi n m i n a ử ụ ể ề ể ỗ ề ể ỗ ửc u H g m phía cao và phía th p. K t n i các chân IC đi u khi n cho phía ầ ồ ấ ế ố ề ểMOSFET A+, A- t ng ng nh sau:ươ ứ ư
Chân Hin n i v i PWM1 t vi đi u khi n PIC18F4331ố ớ ừ ề ể
Chân Lin n i v i PWM0 t vi đi u khi n PIC18F4331ố ớ ừ ề ể
T ng t v i phía MOSFET B+, B-.ươ ự ớ
Đ th xung làm vi c:ồ ị ệ
Hình 4.17: Đ th xung vào ra IR2113ồ ị
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 78
Cbst
A-

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Tính giá tr t Cbst (t bootstrap) trong m ch kích dùng IR2110 :ị ụ ụ ạ
Hình 4.18: Ho t đ ng c a kh i bootstrapạ ộ ủ ố
Giá tr nh nh t c a t tính theo công th c (theo tài li u h ng d n c a nhà ị ỏ ấ ủ ụ ứ ệ ướ ẫ ủs n xu t) : ả ấ
V i:ớ
QTOT = Qg + QLS + (ILK-GE + IQBS + ILK + ILK-diode + ILK-cap + IDS-).THON (*)
L n l t:ầ ượ
Qg là đi n tích c ng c a MOSFET phía cao.ệ ổ ủ QLS là đi n tích đ nh m c theo yêu c u.ệ ị ứ ầ ILK-GE là dòng rò gi a c c gate-source c a MOSFET.ữ ự ủ IQBS là dòng tĩnh mi n th n i.ề ả ổ ILK là dòng rò mi n th n i.ề ả ổ ILK-diode là dòng rò ch y qua diode bootstrap.ạ ILK-cap là dòng rò ch y qua t .ạ ụ IDS- là dòng phân c c kh bão hòa c a diode.ự ử ủ THON là th i gian m c a MOSFET phía cao.ờ ở ủ
ΔV = VCC – VF – VGEmin – VCEon (**)
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 79
minTOT
bstBS
QC
V

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp VCC là đi n áp ngu n c p cho IR2110.ệ ồ ấ VF là áp r i trên diode bootstrap.ơ VGEmin là đi n áp ng ng đ m MOSFET.ệ ưỡ ể ở VCEon là áp gi a emitter-collector c a MOSFET phía th p.ữ ủ ấ
Trong m ch s d ng IC IR2110 và MOSFET là IRFP460, tra trong datasheet ạ ử ục a chúng ta có:ủ
Qg =300nC (datasheet IRFP460)
QLS = 20nC (chung cho MOSFET 500V)
ILK-GE = 100nA (datasheet IRFP460)
IQBS = 230uA (datasheet IR2110)
ILK = 50uA (datasheet IR2110)
ILK-diode = 100uA (v i diode có th i gian ph c h i <100 ns);ớ ờ ụ ồ ILK-cap = 0
IDS- = 40uA (datasheet IR2110)
THON = 0,95.50 uS = 47,5uS (h s mệ ố a = 0,95, Tpwm = 50uS)
Thay vào (*) ta đ c:ượ
QTOT = 300.10-9 + 20.10-9 + (100.10-9 + 230.10-6 + 100.10-6 + 0 + 40.106).47,5.10-
6 = 320,4676.10-9 C
Và:
VCC = 12V
VF = 1,1V (diode BYV26C)
VGEmin = 7,5V (datasheet FGA25N120)
VCEon = 3,2V (datasheet FGA25N120)
Thay vào (**) ta đ c:ượ
VΔ BS = 12 – 1,1 – 7,5 – 3,2 = 0,2 V
Suy ra:
2,010.5,320 9
min
BS
TOTbst V
QC
Ch n t Cọ ụ bst > Cbstmin, v y ch n Cậ ọ bst = 4,7uF.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 80
= 1602,4.10-9 F = 1,6 uF

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 4.19: M ch IR211ạ 0 đi u khi n n a c u Hề ể ử ầ
4.2.3. B l c LC :ộ ọ M t b l c LC đ t gi a c u H và l i nh m gi m các sóng hai b c cao doộ ộ ọ ặ ữ ầ ướ ằ ả ậ
tín hi u đi u bi n đ r ng xung ki u sin (SPWM) t n s chuy n m ch 20kHZ.ệ ề ế ộ ộ ể ở ầ ố ể ạ
Giá tr đi n c m Lị ệ ả f c a b l c đ c ch n đ gi i h n đ dao d ng c a dòngủ ộ ọ ượ ọ ể ớ ạ ộ ộ ủ
đi n d i 10% theo công th c sau: ệ ướ ứ
Ch n L=2mHọ
T l c đ c ch n sao cho s trao đ i công su t ph n kháng d i 5% côngụ ọ ượ ọ ự ổ ấ ả ướ
su t th cấ ự
Đ tránh v n đ c ng h ng cho b l c, do c ng h ng t n s gi a sóng hàiể ấ ề ộ ưở ộ ọ ộ ưở ầ ố ữ
b c th p và b c cao, nên t n s c a nó ph i n m trong kho ng :ậ ấ ậ ầ ố ủ ả ằ ả
V i t n s b l c là ớ ầ ố ộ ọ
Vì v y ta ch n L=2mH và C=3,3µF v i fậ ọ ớ LC=1960 HZ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 81

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
4.2.4. M ch đi u khi n và b o vạ ề ể ả ệ :
Hình 4.20 Đi u khi n ho t đ ng h th ng b ng Pic 18f4431ề ể ạ ộ ệ ố ằ
Kh i đi u khi n trung tâm là PIC 18F4431, có các ch c năng đ c bi t ố ề ể ứ ặ ệnh :ư
14 bit Power Control PWM module:
+ Có đ n 4 kênh ( m i kênh g m 1 c p xung đ i ngh ch)ế ỗ ồ ặ ố ị
+ Th i gian dead time linh ho tờ ạSVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 82

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp + update t ng duty cycle => ngõ ra PWM đáp ng nhanhừ ứ
Motion Feedback Module :
+ Có 3 kênh capture đ c l p:ộ ậ
- các ch đ ho t đ ng linh ho t cho vi c đo đ c đ r ng xungế ộ ạ ộ ạ ệ ạ ộ ụ
- Module h tr Hall Sensorỗ ợ
- Special event trigger cho các module khác
+ Quadrature Encorder interface :
- 2 pha vào và 1 ngõ vào index t encorderừ
- h tr đo đ c v n t cỗ ợ ạ ậ ố
High speed, 200Ksps 10-bit A/D Converter:
+ Có 9 kênh A/D
+ 2 kênh l y m u t c th iấ ẫ ứ ờ
+ L y m u liên t c:1 ; 2 hay 4 kênh đ c l a ch nấ ẫ ụ ượ ự ọ
Flexible Oscillator Structure:
+ 4 ch đ th ch anh ( h tr đ n 40 MHz)ế ộ ạ ỗ ợ ế
+ 2 ngu n xung lock ngoài lên đ n 40 MHzồ ế
+ Ch đ th ch anh n i :ế ộ ạ ộ
- Có 8 t n s ng i dùng có th l a ch n : t 31Khz -> 8 MHzầ ố ườ ể ự ọ ừ
- OSCTUNE có th bù cho s l ch t n s ể ự ệ ầ ố
Peripheral Highlights:
+ Ch u dòng cao : sink/source ( 25mA/25ma)ị
+ 3 ngu n ng t ngoàiồ ắ
+ 2 module Capture / Compare / PWM (CCP)
- Capture 16 bit, đ phân gi i t i đa 6.25 ns ( TCY/6)ộ ả ố
- Compare 16 bit, đ phân gi i t i đa 100 ns ( TCY)ộ ả ố
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 83
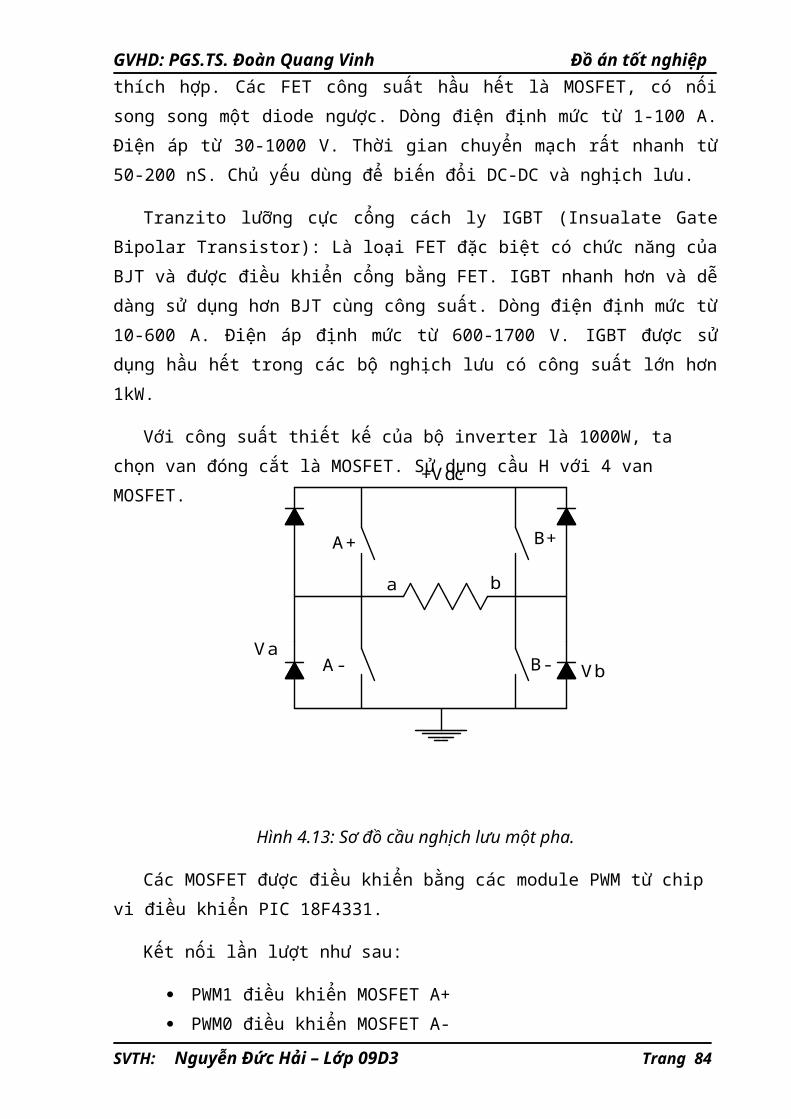
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp - PWM output: đ phân gi i t 1 -> 10 bitộ ả ừ
+ Module USART:
- H tr RS-485, RS-232 và LIN1.2ỗ ợ
- Auto weak-up on start bit
- Auto-Bound detect
+ RS-232 s d ng kh i dao đ ng n i ( ko c n th ch anh ngoài)ử ụ ố ộ ộ ầ ạ
Kh i đo l ng bao g m m ch ph n c ng và modul ADC :ố ườ ồ ạ ầ ứ+ Đo dòng đ u vào Iinầ+ Đo dòng t i Ioutả+ Đo áp Vin, Vout
+ Đo nhi t đ MOSFETệ ọ Kh i ch c năng b o v :ố ứ ả ệ
+ B o v không đ đi n áp đ u vàoả ệ ủ ệ ầ+ B o v quá dòng, quá ápả ệ+ B o v quá nhi t đ cho phép cho bóng bán d nả ệ ệ ộ ẫ
n đ nh đi n áp qua kh i DC-AC b ng đi u ch nh đ r ng xung PWM, có Ổ ị ệ ố ằ ề ỉ ộ ộm ch vòng đi u khi n ph n h i kín và thu t toán đi u khi n P s .ạ ề ể ả ồ ậ ề ể ố
4.3. Th c Hi n Ph n C ng :ự ệ ầ ứ Các s đ nguyên lý đ c th c hi n trên ph n m m vẽ m ch OrCad, bao ơ ồ ượ ự ệ ầ ề ạ
g m các ph n m ch c a b chuy n đ i DC-DC, b chuy n đ i DC-AC , m ch ồ ầ ạ ủ ộ ể ổ ộ ể ổ ạngu n nuôi, m ch hi n th giao ti p ng i dùng b ng LCD.ồ ạ ể ị ế ườ ằ
4.3.1. Các ph n m ch c a b chuy n đ i DC-DC :ầ ạ ủ ộ ể ổ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 84

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
4.3.2. S đ m ch ngu n nuôiơ ồ ạ ồ
4.3.3. Các ph n m ch c a b chuy n đ i DC-ACầ ạ ủ ộ ể ổ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 85

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
S đ m ch c u Hơ ồ ạ ầ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 86

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
S đ m ch đi u khi nơ ồ ạ ề ể
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 87

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
4.3.4. S đ m ch hòa đ ng bơ ồ ạ ồ ộ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 88

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 4.3.5. Ph n m ch giao ti p ng i dùngầ ạ ế ườ :
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 89

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
CH NG ƯƠ 5: L P TRÌNH HO T Đ NG CHO VI ĐI U KHI N PIC 18F4331Ậ Ạ Ộ Ề Ể
5.1 Bi u Đ Tr ng Thái Ho t Đ ng C a H Th ng :ể ồ ạ ạ ộ ủ ệ ố
D a vào thu t toán l p trình mà tr ng thái ho t đ ng c a h th ng đ c bi u ự ậ ậ ạ ạ ộ ủ ệ ố ượ ểdi n bi u đ sau :ễ ở ể ồ
Hình 5.1 Bi u đ l p trình tr ng thái ho t đ ng c a h th ngể ồ ậ ạ ạ ộ ủ ệ ố
Các tr ng thái c a h th ng :ạ ủ ệ ố+ WAIT : Sau khi kh i đ ng h th ng lên (c p ngu n m t chi u cho thi t bở ộ ệ ố ấ ồ ộ ề ế ị
bi n đ i), tr ng thái h th ng t m th i ch đ ch .Tr ng thái này t o tr m t ế ổ ạ ệ ố ạ ờ ở ế ộ ờ ạ ạ ể ộkho ng th i v a đ đ h th ng b t đ u n đ nh . Khi đi u ki n đ h th ng ả ờ ừ ủ ể ệ ố ắ ầ ổ ị ề ệ ể ệ ốb t đ u làm vi c ch a đ : đi n áp đ u vào h th ng ch a đ áp (DC_VOL_LOW)ắ ầ ệ ư ủ ệ ầ ệ ố ư ủ
và ch a nh n nút kh i đ ng (TURN_OFF) thì h th ng sẽ tr ng thái này cho ư ấ ở ộ ệ ố ở ạđ n khi hai đi u ki n đã đ .ế ề ệ ủ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 90

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp N u đã đ hai đi u ki n trên, h th ng sẽ b t đ u làm vi c. B t hai ch đế ủ ề ệ ệ ố ắ ầ ệ ậ ế ộ
chuy n đ i đi n áp DC-DC và DC-AC.Cho phép đ ng b đi n áp b ngh ch l uể ổ ệ ồ ộ ệ ộ ị ư
v i đi n áp l i.Sau đó chuy n sang tr ng thái ki m tra đ ng b SYNC.ớ ệ ướ ể ạ ể ồ ộ
+ SYNC : Đây là tr ng thái ki m tra đ ng b c a đi n áp h th ng so v iạ ể ồ ộ ủ ệ ệ ố ớ
đi n áp l i.Tr ng thái này th c hi n ki m tra xem h th ng có l i gì khôngệ ướ ạ ự ệ ể ệ ố ỗ
( hàm “check_fault();” sẽ th c hi n công vi c này) .ự ệ ệ
N u h th ng không có l i, và hai đi u ki n quan tr ng là : đang t n t i đi nế ệ ố ỗ ề ệ ọ ồ ạ ệ
áp l i ( AC_good) , pha c a đi n áp l i và h th ng đang trùng nhau ( đangướ ủ ệ ướ ệ ố
đ c khóa pha: Phase_Lock) thì h th ng đ c đ ng b .Cho phép đóng RELAYượ ệ ố ượ ồ ộ
đ k t n i h th ng v i l i và chuy n sang tr ng thái theo dõi TRACK.N u haiể ế ố ệ ố ớ ướ ể ạ ế
đi u ki n trên v n ch a đ t thì tr ng thái c a h th ng v n ch đ SYNC choề ệ ẫ ư ạ ạ ủ ệ ố ẫ ở ế ộ
đ n khi đ hai đi u ki n đó.ế ủ ề ệ
N u trong quá trình ki m tra l i th y phát hi n l i, l p t c ng ng ho t đ ngế ể ỗ ấ ệ ỗ ậ ứ ư ạ ộ
h th ng (OFF) và chuy n sang trang thái x lý l i FAULT.ệ ố ể ử ỗ
+ TRACK : Tr ng thái theo dõi ho t đ ng c a h th ng.Tr ng thái TRACKạ ạ ộ ủ ệ ố ạ
ch theo dõi ho t đ ng c a h th ng b ng cách ki m tra l i h th ngỉ ạ ộ ủ ệ ố ằ ể ỗ ệ ố
( check_fault ). Khi h th ng đã ho t đ ng n đ nh thì tr ng thái c a h th ng sẽệ ố ạ ộ ổ ị ạ ủ ệ ố
luôn ch đ này.Các l i th ng g p c a h th ng là : quá dòng đi n m t chi u,ở ế ộ ỗ ườ ặ ủ ệ ố ệ ộ ề
đi n áp m t chi u không n đ nh ( nh h n ho c l n h n giá tr cho phép ), m tệ ộ ề ổ ị ỏ ơ ặ ớ ơ ị ấ
đi n áp xoay chi u c a l i, m t đ ng pha đi n áp hai h th ng.ệ ề ủ ướ ấ ồ ệ ệ ố
N u l i xu t hi n trong quá trình ki m tra, ngay l p t c d ng h th ngế ỗ ấ ệ ể ậ ứ ừ ệ ố
(OFF) và chuy n sang tr ng thái x lý l i FAULT.ể ạ ử ỗ
+ FAULT :
Đây là tr ng thái x lý l i c a h th ng.Tr ng thái này th c hi n công vi cạ ử ỗ ủ ệ ố ạ ự ệ ệ
d ng toàn b h th ng ( t t các b chuy n đ i, ng t RELAY đ tách h th ng raừ ộ ệ ố ắ ộ ể ổ ắ ể ệ ố
kh i l i ), chuy n h th ng v tr ng thái ch WAIT đ b t đ u m t chu trìnhỏ ướ ể ệ ố ề ạ ờ ể ắ ầ ộ
tr ng thái m i.ạ ớ
Chu trình tr ng thái m i cũng sẽ bao g m nh ng b c chuy n đ i tr ng tháiạ ớ ồ ữ ướ ể ổ ạ
nh trên.Nh ng nh khâu ki m tra l i mà cho phép h th ng có th đ c làm ư ư ờ ể ỗ ệ ố ể ượvi c ti p hay không.N u l i v n ch a đ c kh c ph c (s c thi t b ) thì h ệ ế ế ỗ ẫ ư ượ ắ ụ ự ố ế ị ệth ng sẽ quanh qu n trong các tr ng thái WAIT-SYNC-FAULT mà thôi, và nh ố ẩ ạ ưv y đ ho t đ ng h th ng ph i có s can thi p s a ch a t ng i dùng.ậ ể ạ ộ ệ ố ả ự ệ ữ ữ ừ ườ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 91

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
5.2 Th c Hi n Khâu Ngh ch L u B ng Ph ng Pháp Đi u Bi n Đ R ng ự ệ ị ư ằ ươ ề ế ộ ộXung Ki u Sine Hóa :ể
5.2.1 Cách t o xung PWM ki u sin hóa :ạ ểVi c dùng ph ng pháp đi u bi n đ r ng xung trong khâu ngh ch l u, ệ ươ ề ế ộ ộ ị ư
chúng tôi đã đ c p trong ch ng tr c. đây chúng tôi sẽ trình bày cách th c ề ậ ươ ướ Ở ựhi n m t khâu phát xung SPWM b ng cách l p trình cho vi đi u khi n Pic ệ ộ ằ ậ ề ể18f4431.
Vi đi u khi n Pic 18f4431 có 4 kênh PWM, là Chip chuyên d ng đ đi u ề ể ụ ể ềkhi n đ ng c đi n xoay chi u m t pha và 3 pha.ể ộ ơ ệ ề ộ
Trong ch đ phát xung PWM theo ki u FREE-RUNNINGế ộ ể , sóng mang sẽ là
sóng răng c a nh hình ư ư 5.2 và sóng đi u bi n đ c r i r c hóa, l y m u theo giáề ế ượ ờ ạ ấ ẫ
tr s . ị ố
Hình 5.2 Ho t đ ng c a modul PWM ki u Freeạ ộ ủ ể -running
V i ho t đ ng c a modul PWM nh v y, ta đi u ch đ r ng xung ki u sineớ ạ ộ ủ ư ậ ề ế ộ ộ ể
hóa nh Hình 5.2ư . Sóng mang là sóng răng c a đ c t o ra nh s đ m lên c aư ượ ạ ờ ự ế ủ
PTMR, khi thanh ghi này đ t giá tr b ng giá tr đ t PTPER thì chính là khi k tạ ị ằ ị ặ ế
thúc m t chu kỳ c a sóng răng c a (xem Hình 5.2 ). Giá tr đ t mà ta đ a vàoộ ủ ư ị ặ ư
thanh ghi PDCx là khác nhau, thay đ i liên t c sau m i chu kỳ sóng tam giác. Cácổ ụ ỗ
giá tr thay đ i đó chính là các giá tr l y m u sóng sin v i chu kỳ l y m u là chuị ổ ị ấ ẫ ớ ấ ẫ
kỳ sóng tam giác. Trên Hình 5.3, sóng sine đang vẽ đây là ch a l y m u đ dở ư ấ ẫ ể ễ
dàng phân tích bài toán. Sóng đi u bi n sine 1 và sine 2 ng c pha nhau. Phép soề ế ượ
sánh đ a ra k t qu trên các chân c a modul PWM th y rõ trên Hình 5.3:ư ế ả ủ ấ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 92

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 5.3
C p PWM1,PWM0:ặ
N u sóng sine1 l n h n sóng tam giác: PWM1 = 1ế ớ ơN u sóng sine1 bé h n sóng tam giác: PWM1 = 0 ế ơ
Chân PWM0 luôn ngh ch đ o v i PWM1.ị ả ớ
C p PWM3,PWM2:ặ
N u sóng sine2 l n h n sóng tam giác: PWM3 = 1ế ớ ơN u sóng sine2 bé h n sóng tam giác: PWM3 = 0 ế ơ
Chân PWM2 luôn ngh ch đ o v i PWM3.ị ả ớ
Đem các chân PWM đi đi u khi n các MOSFET trong c u ngh ch l u m t ề ể ầ ị ư ộpha:
PWM1: MOSFET A+PWM0: MOSFET A-PWM3: MOSFET B+PWM2: MOSFET B-
A+ B+
+Vdc
A- B-Va
Vb
a b
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 93

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Hình 5.4: C u ngh ch l u m t phaầ ị ư ộ
Ta có:
Khi A+ và B- cùng đóng thì Uab = Udc
Khi A- và B+ cùng đóng thì Uba = Udc.
T Hình 5.3, đem PWM1 (A+) và PWM2 (B-) v cùng phía, đem PWM3 (B+) ừ ềvà PWM0(A-) v cùng phía nh Hình 5.4.T đây ta có đ c đi n áp Uab. ề ư ừ ượ ệ
Hình 5.5
Ta có đi n áp xoay chi u gi a a-b nh Hình 5.5.ệ ề ữ ư
Uab
Uba
U
t
t
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 94

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Hình 5.6
5.2.2 R i r c hóa b ng sine:ờ ạ ảNh v y, vi c thay đ i đ r ng xung PWM theo m t hàm sine sẽ làm choư ậ ệ ổ ộ ộ ộ
đi n áp đ u ra c a c u H cũng bi n đ i theo hàm sine.Nh ng đ đ a các giá trệ ầ ủ ầ ế ổ ư ể ư ị l y m u này vào thanh ghi đ r ng xung c a modul PWM , giá tr đó ph iấ ẫ ộ ộ ủ ị ả
d ng.Đó chính là nguyên nhân hàm sine chu n mà ta t o ra ph i có g c t a đươ ẩ ạ ả ố ọ ộ
là ch không ph i là 0 ( Dutyứ ả max là đ r ng xung l n nh t t ng ng t iộ ộ ớ ấ ươ ứ ạ
đó biên đ đi n áp xoay chi u tao ra là l n nh t ).Và hàm sine chu n c a ta cóộ ệ ề ớ ấ ẩ ủ
d ng:ạ
Sinetable=
Trong đó : ma – T s đi u bi nỉ ố ề ế
là t ng ng v i t n s 50Hzươ ứ ớ ầ ố
Hình sau bi u di n cách l y m u b ng sine, chu kỳ l y m u b ng chu kỳ ể ễ ấ ẩ ả ấ ẩ ằsóng mang, ta có:
Chu kì m t l n l y m u : ộ ầ ấ ẫ
Chu kì c a đi n áp sine 50Hz :ủ ệ Tsine = 1/50 = 0,02 S
Suy ra s ph n t l y m u sóng sine là:ố ầ ử ấ ẩ
N = Tsine/Tpwm = 200 (ph n t )ầ ử
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 95

Tsine
Tpwm PTPER=9994000
2000
0
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 5.7
V y ta c n t o m t m ng g m 300 ph n t l y m u c a sóng sine cho viậ ầ ạ ộ ả ồ ầ ử ấ ẫ ủ
đi u khi n. Các giá tr b ng sine này đ c đ a vào thanh ghi PDCx, vi đi u khi nề ể ị ả ượ ư ề ể
sẽ k t h p thêm 2 bit Q-Clocks đ so sánh v i giá tr PTMR,do đó giá tr l y m uế ợ ể ớ ị ị ấ ẫ
c a sóng sine sẽ k t h p thêm 2 bit Q-Clocks đ so sánh v i giá tr PTMR. Giá trủ ế ợ ể ớ ị ị l n nh t c a PTMR là giá tr PTPER, chu kỳ Tớ ấ ủ ị PWM tính theo công th c sau:ứ
PTPMRSTfPTPER
PTPMRSf
PTPERT PWMOSC
OSCPWM .4
.)1(
)4(
)1(
Fosc: t n s xung clock c a PIC, ta s d ng Fosc=40MHzầ ố ủ ử ụ
Tpwm = 100.10-5S
PTPMS: t l chia, ta l p trình b ng 1.ỉ ệ ậ ằ
Thay vào ta có:
Vì giá tr trong PDCx đ c k t h p thêm 2 bit n a, nên giá tr c a PDCx ph i ị ượ ế ợ ữ ị ủ ảlà: PDCx = 4.(999+1) = 4000.
T Hình 5.7. ta có ph ng trình l y m u sóng sine là:ừ ươ ấ ẫ
Sinetable=
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 96

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
=
=
V i: ớ ma: h s đi u bi n biên đ ệ ố ề ế ộ
ti = (i là s th t ph n t l y m u)ố ứ ự ầ ử ấ ẫ
Vì c ch chèn dead-time c a PIC 18F4331 nên ch có th s d ng h s ơ ế ủ ỉ ể ử ụ ệ ốđi u bi n biên đ l n nh t là mề ế ộ ớ ấ a=0,95. Theo thi t k thì ta ch n mế ế ọ a=0,93 đ qua ểb ngh ch l u đi n áp ra có tr hi u d ng đ i v i t n s 50Hz là 220V. ộ ị ư ệ ị ệ ụ ố ớ ầ ố
5.3. Ch ng Trình Firmware Cho Vi Đi u Khi n Pic 18F4431 :ươ ề ểCh ng trình đ c biên d ch b ng ph n m m CCS complier, ch ng trình ươ ượ ị ằ ầ ề ươ
trong Ph l c 1ụ ụ
CH NG ƯƠ 6: K T QU Đ T Đ CẾ Ả Ạ ƯỢ
6.1. Mô ph ng đi n áp đ u ra b bi n đ i :ỏ ệ ầ ộ ế ổ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 97

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 6.1 Mô ph ng đi n áp đ u ra b bi n đ i đang trong quá trình đ ng pha v iỏ ệ ầ ộ ế ổ ồ ớ
đi n áp l iệ ướ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 98

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
6.2. Mô hình m ch th c t :ạ ự ế6.2.1. Mô hình t ng th :ổ ể
Hình 6.2 T ng th mô hìnhổ ể
6.2.2. Chi ti t các thành ph n trong mô hình:ế ầ
Hình 6.3 Mô hình tuabin phát đi n gióệ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 99

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 6.4 Mođun cánh qu t đón gióạ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 100

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Hình 6.5: Bo m ch băm đi n áp và n p c quyạ ệ ạ ắ
Hình 6.6 Bo m ch DC-DCạ đ n c cơ ự
HÌnh 6.7 Bo m ch DC-DC đa c cạ ự
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 101

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 6.8 Bo m ch đi u khi n trung tâm b DC-ACạ ề ể ộ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 102

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 6.9 Bo m ch c u Hạ ầ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 103

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp HÌnh 6.10 Bo m ch l c ac đ u raạ ọ ầ
Hình 6.11 Bo m ch ngu n nuôiạ ồ
Hình 6.12 Xung PWM đo đ c chân đi u khi n MOSFETượ ở ề ể
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 104
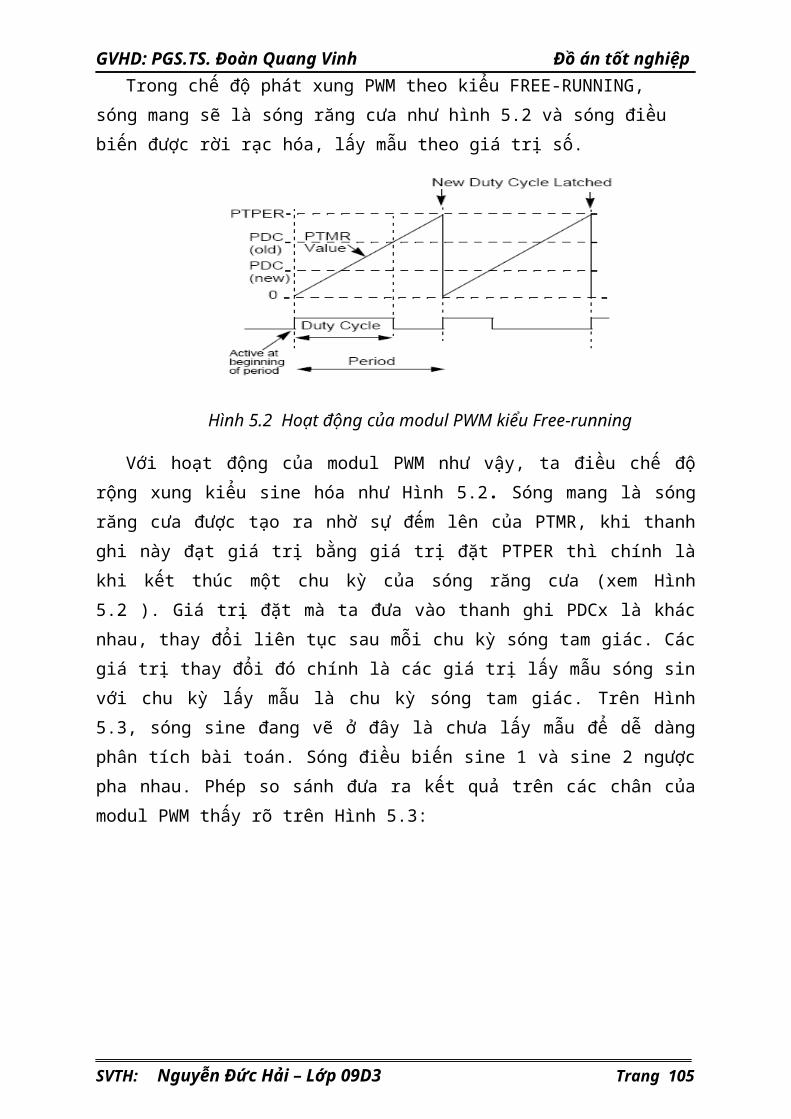
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Hình 6.13 D ng sóng đ u ra trên máy hi n sóng khi ch a có t iạ ầ ệ ư ả
Hình 6.14 D ng sóng đ u ra b bi n đ i khi có t iạ ầ ộ ế ổ ả
6.3. K t lu n :ế ậ
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 105

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp Vi c đi u khi n đ đ m b o các giá tr đi n áp , dòng đi n h th ng ệ ề ể ể ả ả ị ệ ệ ệ ố phong
đi nệ ho t đ ng n đ nh, luôn t ng thích v i đi n áp c a l i đi n tuy b cạ ộ ổ ị ươ ớ ệ ủ ướ ệ ướ
đ u c b n có th th c hi n b ng vi đi u khi n PIC 18f4431. Tuy nhiên, đầ ơ ả ể ự ệ ằ ề ể ể
nâng cao hi u năng c a h th ng c n s d ng các h vi đi u khi n chuyên x lýệ ủ ệ ố ầ ử ụ ọ ề ể ử
tín hi u s DSP, là ph ng h ng mà chúng em s d ng cho b inverter phiênệ ố ươ ướ ử ụ ộ
b n khác sau này.ả
B bi n đ i này có th s d ng cho năng l ng gió nói riêng và năng l ng ộ ế ổ ể ử ụ ượ ượtái t o nói chung vì v y nó r t h u d ng khi s d ng cho các ph t i th p, đ c ạ ậ ấ ữ ụ ử ụ ụ ả ấ ặbi t là vùng h i đ oệ ả ả , vùng núi xa xôi c a t qu c khi mà l i đi n đây ch a ủ ổ ố ướ ệ ở ưphát tri n.ể
TÀI LI U THAM KH OỆ Ả[1] Lê Văn Doanh, Nguy n Th Công, Tr n Văn Th nh (2007), ễ ế ầ ị Đi n T Côngệ ử
Su t,Lý Thuy t, Thi t K , ng D ng, T p Iấ ế ế ế Ứ ụ ậ , Nhà xu t b n Khoa h c và Kỹấ ả ọ
thu t.ậ[2] MICROCHIP. (2003). PIC18F2331/2431/4331/4431 DataSheet. Michrochip
Techonology Inc.
[3] Ph m Minh Tu n, Ph m Th ng Cát (2008), “Nghiên c u thi t k và chạ ấ ạ ượ ứ ế ế ế
t o b ngh ch l u cho tr m phát tri n năng l ng gió và m t tr i”, ạ ộ ị ư ạ ể ượ ặ ờ T p chíạ
TĐH, (9/2008), tr. 28-31.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 106

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
Ph l c 1: Ch ng trình cho pic 18f4431ụ ụ ươ#include <18f4431.h>
#fuses H4,NOWDT,NOPROTECT,PUT,NOBROWNOUT,NOLVP
#use delay(clock=40000000)
#include <math.h>
#include <lcd_lib_4bit.c>
// Dinh nghia cac cong voi ho Pic 18F4431.
#Byte PortA = 0xF80
#Byte PortB = 0xF81
#Byte PortC = 0xF82
#bit ZeroP=0xF82.2
#Byte PortD = 0xF83
#Byte PortE = 0xF84
#bit Za=0xF84.1
#bit Zb=0xF84.2
// Dinh nghia cac byte su dung.
#bit TBINT_PIN = 0xfa4.4
#byte PTMRL = 0XF7D
#byte PTMRH = 0XF7C
#bit CCP1IF = 0XF9E.2 // bit ngat Input Capture
#bit CCP1M0 = 0XFBD.0 // bit cai dat suon ngat Input Capture
#bit CCP2IF=0XFA1.0 // co ngat compare
#word PTPER = getenv("SFR:PTPERL") // thanh ghi period cua PPWM
//dinh nghia hang, bien
#define F50HZ 25000
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 107
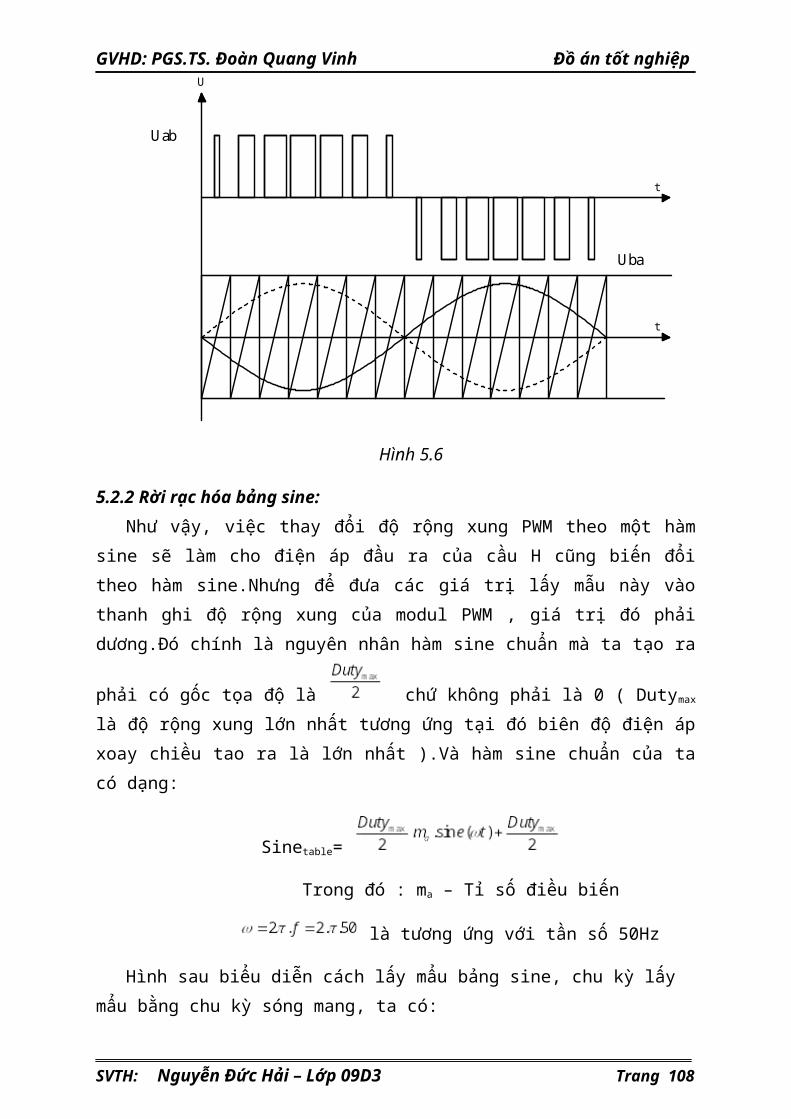
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp #define F50HZ100 999
#define FSETPOINT 12500
#define FSETPOINT2 0
#define FAULT_MIN_DC_VOLTS 583
#define FAULT_MAX_DC_VOLTS 815
#define AC_VOLTS_REF 840
#define MIN_FREQ 54
#define MAX_FREQ 66
#define ADJ16_START 120
#define MIN_ADJ16 130
#define MAX_ADJ16 1000
#define ON 1
#define OFF 0
//Dinh nghi thiet bi ngoai vi
#define RELAY PIN_E0 //role
#define SD PIN_A5 // Shutdown
#define BELL PIN_C0 //Chuong
#define FAN PIN_C1 // Quat
#define ON PIN_C4 // nut ON OFF
#define TIE PIN_C5 // nut ON TIE , OFF TIE
#define ZeroP1 PIN_C2 // Zero point
#define Za1 PIN_E1 // pha duong
#define Zb1 PIN_E2 // Pha am
#define ON_LED PIN_D0 // den man hinh LCD
#define SD_DC PIN_D1 // shutdown DC-DC
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 108

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp //Dinh nghia trang thai cua he thong
// ------ Khai bao bien toan cuc ------
int8 delta =5;
int16 adj16 = ADJ16_START;
int16 pwm_inc;
int16 pwm_prev;
int16 pwm;
int16 pwm_term;
int8 edgel;
int8 edgeh;
int16 edge_temp;
int16 edge_neg;
int16 edge_pos;
int16 edge1;
int16 edge2;
int16 ccp2_max;
int8 ac_count = 10;
enum { POS, NEG };
unsigned int8 grid_intertie;
unsigned int8 fault;
int1 FAULT_MAX_DC_AMPS ;
int32 adc_result;
int16 dc_volts;
int16 ac_volts;
unsigned int8 ac_good;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 109

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp unsigned int8 phase_lock;
signed int16 freq_error;
signed int16 freq_error_sum;
int16 freq;
unsigned int16 pwm1;
unsigned int16 pwm2;
unsigned int32 temp32;
unsigned int8 pwm_temp;
unsigned int16 seconds;
unsigned int16 prev_seconds;
unsigned int8 pp_switch;
int16 temperature;
volatile unsigned int8 polarity;
enum { DC_VOLT, AC_VOLT, TEMP }adc_type;
enum { WAIT, SYNC,TRACK,PP_FAULT }state;
///bien bang sine ----
const INT16
sin_wave[200]=
{2000,2058,2117,2175,2233,2291,2349,2406,2463,2519,2575,2630,2685,2739,
2792,2844,2896,2947,2997,3045,3093,3140,3186,3230,3273,3315,3356,3395,3
433,3470,3505,3538,3570,3601,3630,3657,3683,3707,3729,3750,3769,3786,38
02,3815,3827,3837,3845,3852,3856,3859,3860,3859,3856,3852,3845,3837,382
7,3815,3802,3786,3769,3750,3729,3707,3683,3657,3630,3601,3570,3538,3505,
3470,3433,3395,3356,3315,3273,3230,3186,3140,3093,3045,2997,2947,2896,2
844,2792,2739,2685,2630,2575,2519,2463,2406,2349,2291,2233,2175,2117,20
58,2000,1942,1883,1825,1767,1709,1651,1594,1537,1481,1425,1370,1315,126
1,1208,1156,1104,1053,1003,955,907,860,814,770,727,685,644,605,567,530,49
5,462,430,399,370,343,317,293,271,250,231,214,198,185,173,163,155,148,144,
141,140,141,144,148,155,163,173,185,198,214,231,250,271,293,317,343,370,39
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 110

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 9,430,462,495,530,567,605,644,685,727,770,814,860,907,955,1003,1053,1104,1
156,1208,1261,1315,1370,1425,1481,1537,1594,1651,1709,1767,1825,1883,19
42};
unsigned INT32 index1=0;
unsigned INT32 index2=199;
// Ham su dung
void io_init();
void print_results(void);
unsigned int8 check_faults(void);
void update_adj(int16 adjust);
void TURN_ON ();
void TURN_OFF();
void io_init()
{ Set_Tris_A(0<<Pin_A5); // chan A5 dau ra
output_high(SD); // OFF DC-AC
output_low(BELL);
Set_Tris_D(0x00); // Shutdown DC-DC
output_high(SD_DC);
output_low(ON_LED); // tat den man hinh LCD
output_low(RELAY); // ngat Relay
// Cai dat ADC
setup_adc_ports( ALL_ANALOG );
setup_adc(ADC_CLOCK_INTERNAL );
set_adc_channel( 0 );
// dong bo hoa LCD
LCD_INIT();
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 111

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp //cai dat ngat ngoai
ext_int_edge(H_to_L);
clear_interrupt(INT_EXT);
enable_interrupts(INT_EXT);
//cai dat ngat timer 0
// Cai dat ngat Capture Timer 1
setup_ccp1(CCP_CAPTURE_FE); // thiet lap CCP1 ngat suon xuong
setup_timer_1(T1_INTERNAL|T1_DIV_BY_8); // cai dat Timer 1 voi thoi gian
tagn 1 don vi la 0,8us
disable_interrupts(INT_CCP1); // vo hieu hoa ngat CCP1
// Cai dat ngat Output Compare Timer1
setup_ccp2(CCP_COMPARE_INT);
CCP_2=F50Hz;
ccp2_max = F50HZ; //thoi gian ngat CCP2 la 25000 don vi tuong duong 20ms
cho mot chu ki dien ap AC
enable_interrupts(INT_CCP2);
//cai dat PWM dieu khien toc do quat mat
//cai dat Power Stage Controller
setup_power_pwm_pins(PWM_COMPLEMENTARY,PWM_COMPLEMENTARY,PW
M_OFF,PWM_OFF);
setup_power_pwm(PWM_CLOCK_DIV_4|PWM_FREE_RUN,1,0,999,0,1,10);
enable_interrupts(INT_PWMTB);
enable_interrupts(GLOBAL); // ngat toan cuc
}
void main(void)
{ unsigned int8 wait_state_count = 0;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 112

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp // Thiet lap vao ra
io_init(); // cai dat vao ra va dong bo
state = WAIT;
fault = 0;
TURN_OFF();
while(1){
if(seconds != prev_seconds) { //Kiem tra trang thai cua he thong sau moi
giay
switch(state) {
case WAIT :
if (wait_state_count-- > 0) {
state = WAIT; //o che do WAIT khoagn 5 giay de he thong xac lap
}
else if (dc_volts > 1400 & input(ON)==1) { //neu dien ap PV da du
state = SYNC; //chuyen sang trang thai SYNC
grid_intertie = TRUE; //Cho phep dong bo dien ap 2 he thong
TURN_ON(); //turn on MOSFET drivers
}
else {
state = WAIT; //neu la thoi gian ban dem thi o che do WAIT
}
break;
case SYNC :
if (check_faults()) { //kiem tra loi
state = PP_FAULT; //chuyen den che do Fault neu co loi
TURN_OFF();
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 113

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp }
else if (ac_good & phase_lock) { //neu co dien ap luoi va da dong bo
state = TRACK; //chuyen sang che do theo doi TRACK
output_high(RELAY); //relay ON de ket noi 2 he thong
}
else {
state = SYNC; //nguoc lai thi van o che do SYNC
}
break;
case TRACK : // che do theo doi
if (check_faults()) {
state = PP_FAULT;
TURN_OFF(); //turn off MOSFET drivers
}
else {
state = TRACK;
}
break;
case PP_FAULT :
TURN_OFF(); //turn off MOSFET drivers
output_low(RELAY); //relay = OFF;
state = WAIT;
wait_state_count = 5;
fault = FALSE;
break;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 114

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp default :
break;
} //end case
prev_seconds = seconds;
print_results(); // hien thi LCD
}
}
}
//----------------------------------------------------------------------------------------------------
// Day la chuong trinh ngat khi phat hien suon len tai dau vao bo Input capture
Timer1.(chan RC2)
// No say ra truoc va sau khi diem 0 dien ap di qua mot thoi gian ngan.
// Thoi diem 0 duoc tinh toan bang khoang thoi gian giua 2 lan ngat.
// Phan cung gom 2 Opto quang ket noi voi dien ap luoi.
// Chung xac dinh 1 trong 2 nua chu ki Duong va Am cua dien ap luoi
// Mot Opto duoc ket noi voi mot dau vao cua PIC (E1 va E2), nhu vay co the
phan biet duoc dien ap dang o nua chu ki nao?
// Tai diem 0, moi Opto se o muc thap cho den khi dien ap moi Opto lon hon it
nhat 2V den 3V
// Vi vay ta chi nhan duoc thoi gian ma Opto1 muc "0" truoc khi cat diem 0 va
Opto2 muc "1" sau khi cat diem 0
// Hai tin hieu duoc OR lai voi nhau roi dua vao CCP1 cua Timer1
// Thoi gian ke tu lan ngat dau den 2 lan ngat tiep theo la Chu ki cua dien ap, chia
2 ta duoc thoi diem dien ap di qua diem 0
// Timer1 do duoc chu ki cua dien ap Ac la 20ms hay la gia tri 25000 o cai dat
Timer1
// Vi vay, thoi gian diem 0 bang qua la giua 0 and 25000.
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 115

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp //----------------------------------------------------------------------------------------------------
#int_ccp1
void isr()
{
edge_temp = CCP_1; //lay 16 bit gia tri capture vao edge_temp
if (CCP1M0==0) { //kiem tra bit de biet dang doc suon xuong
//delay 30us
if (ZeroP==0) edge_neg = edge_temp; //kiem tra chan Zero, neu o muc 0 la
dung
else return; //sai thi thoat
CCP1M0=1; //set bit de ngat suon len cho lan ngat ke tiep
CCP1IF=0; //xoa co ngat
}
else if (CCP1M0==1) { //kiem tra bit de biet dang doc suon len
if (ZeroP==1) edge_pos = edge_temp; //iem tra chan Zero, neu o muc 1 la
dung
else return; //sai thi thoat
CCP1M0=0; //reset bit de ngat suon xuong cho lan ngat ke tiep
CCP1IF=0; //xoa co ngat
if (Zb==1) { //neu dang o chu ki am cua dien ap thi Zb=1
if ((edge_pos - edge_neg) >= 0) {
edge1 = ((edge_pos - edge_neg) / 2) + edge_neg; //Chia 2 ta duoc khoang
thoi gian diem 0 cat, cong voi thoi diem goc
} // ta duoc thoi diem cat cua diem 0
else { //truong hop diem 0 cat tu thoi diem
CCP2max=25000 troi ve 0
edge1 = (((ccp2_max - edge_neg) + edge_pos) / 2) + edge_neg;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 116
GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp if (edge1 > ccp2_max) edge1 = edge1 - ccp2_max;
}
}
else if (Za==1) { //neu dang o chu ki duong cua dien ap thi Za=1
if ((edge_pos - edge_neg) >= 0) {
edge2 = ((edge_pos - edge_neg) / 2) + edge_neg; //Chia 2 ta duoc khoang
thoi gian diem 0 cat, cong voi thoi diem goc
} // ta duoc thoi diem cat cua diem 0
else { //truong hop diem 0 cat tu thoi diem
CCP2max=25000 troi ve 0
edge2 = (((ccp2_max - edge_neg) + edge_pos) / 2) + edge_neg;
if (edge2 > ccp2_max) edge2 = edge2 - ccp2_max;
}
}
}
ac_count = 10; //bien nay duoc Set khi moi lan dien ap ve 0
} //muc dich de nhan bet xem co ton tai dien ap luoi hay
khong
// Ngat say ra cho moi chu ki 50Hz tuong duong voi 20ms
// Timer1 duoc cai dat gia tri 12500 cho mot chu ki AC 20ms. No duoc luu trong
bien F50HZ, va gia tri thuc te thi o bien comp1a_max.
// De giu cho dien ap Ac ben trong(Inverter) dong bo voi AC ben ngoai(Grid) thi
phai thay doi chu ki song dien ap ben trong
// Toi thay doi bang cach dung Bo Khoa Pha(Phase Look Loop). Bo Khoa Pha nay
la mot bo dieu khien phan hoi PI.
// Bo dieu khien PI(proportional and integral) tinh toan loi goc pha (Phase
errors) cua song AC ben trong va ben ngoai, tu do tinh toan do dai
// chu ki song moi (qua Timer1) cho Inverter
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 117

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp // Vi vay mac du do dai cua Timer1 theo danh nghia la 25000 (F50HZ) nhung gia
tri trong bien ccp2_max luon thay doi
// de giu cho goc pha 2 he thong luon dong bo voi nhau.
#int_ccp2
void TIMER1_COMP2_vect()
{ static unsigned int8 count_sec;
set_timer1(0);
CCP2IF=0;
index1=0;
index2=199;
if (grid_intertie == TRUE) { // du dieu kien de dong bo voi AC luoi
enable_interrupts(INT_CCP1); //enable capture interrupt
if (ac_count-- <= 0) { //ac_count duoc set bang 10 sau moi lan ngat
CCP1
ac_count = 0; //neu khong co dien ap luoi thi no se giam dan ve
0
ac_good = FALSE; //deu do co nghia la khong co dien ap luoi
phase_lock = FALSE; //nen khong the thuc hien cong viec dong
bo voi dien ap luoi
ccp2_max = F50HZ; //thiet lap CCP2 ve gia tri mac dinh
}
else {
ac_good = TRUE; //neu co dien ap luoi
if (edge2 <= FSETPOINT) { //so sanh gia tri chenh lech giua diem 0
voi diem thiet lap mat dinh
freq_error = FSETPOINT2 - edge2; //edge2 la thoi gian dien ap tu chu
ki duong tro ve 0 va chuyen sang chu ki am
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 118

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp }
else { // FSETPOINT2 = 0
freq_error = (ccp2_max - edge2) + FSETPOINT2; //gia tri sai lech goc pha
}
if (freq_error > 500) {
freq_error = 500; //ta gioi han do sai lech cho cong viec dieu
chinh
phase_lock = FALSE;
}
else if (freq_error < -500) {
freq_error = -500;
phase_lock = FALSE;
}
else {
phase_lock = TRUE; //neu sai so nam trong khoang gioi han thi
co the dong bo
}
//ta tinh toan thong so P va I cua bo dieu chinh.
freq_error_sum += freq_error; //de tinh toan thong so I ta can tinh
tong sai so
if (freq_error_sum > 30000) {freq_error_sum = 30000;} //gioi han thong so I
o khoang -30000 va 30000
else if (freq_error_sum < -30000) freq_error_sum = -30000;
ccp2_max = F50HZ - (freq_error/2 )- (freq_error_sum / 256) ; //su dung
thong so P (freq_error / 2) va I
//(freq_error_sum / 256) de chinh gia tri chu ki dien ap nghich luu
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 119

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp }
}
else { //neu khong co dien ap luoi
disable_interrupts(INT_CCP1); //disable capture interrupt
ac_good = FALSE;
phase_lock = FALSE;
CCP_2 = F50HZ; //thiet lap CCP2 ve gia tri mac dinh
}
adc_result=read_adc(); // doc cac thong so phan hoi nhu dien ap,
nhiet do
switch (adc_type) {
case DC_VOLT:
dc_volts =adc_result ;
adc_type = AC_VOLT;
set_adc_channel( 2 );
break;
case AC_VOLT:
ac_volts =adc_result ;
adc_type =TEMP;
set_adc_channel( 4 );
break;
case TEMP:
temperature = adc_result;
adc_type = DC_VOLT;
set_adc_channel( 0 );
break;
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 120

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp }
if(state == TRACK) { // hieu chinh dien ap AC bang thuat toan P so
if(ac_volts < AC_VOLTS_REF)
update_adj(delta);
else
update_adj(-delta);
}
if (++count_sec >= 50) {
seconds++; // ngat 50 lan, moi lan 0,02s ta duoc 1 giay
count_sec = 0;
}
}
// chuong trinh ngat cap nhat Duty cycler cho modul PWM
#INT_PWMTB
void PWM_INTERRUPT()
{
TBINT_PIN=0;
pwm_temp = sin_wave[index1]; // lay gia tri pwm tu bang Sin cho
modul PWM 0 va 3
temp32 = (unsigned int32)pwm_temp * (unsigned int32)adj16; // nhan adj16
voi gia tri bang Sin de thay doi tong the bang sin
pwm1 = (unsigned int16)(temp32 >> 8); // chia 256 de dua bien pwm
ve dang ban dau
pwm_temp = sin_wave[index2]; // Tuong tu cho modul PWM 1 va 2
temp32 = (unsigned int32)pwm_temp * (unsigned int32)adj16;
pwm2 = (unsigned int16)(temp32 >> 8);
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 121

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp if(PTMRL>=1)
{
set_power_pwm0_duty(pwm1); //thiet lap do rong xung moi
set_power_pwm2_duty(pwm2);
index1++;
index2--;
if(index1>=200)
{
index1=0;
index2=199;
}
}
}
// Chuong trinh kiem tra loi he thong
unsigned int8 check_faults(void) {
if(pp_switch == ON) {
if(FAULT_MAX_DC_AMPS==1) { fault = 2;FAULT_MAX_DC_AMPS=0;}
else if(dc_volts < FAULT_MIN_DC_VOLTS) fault = 4;
else if(dc_volts > FAULT_MAX_DC_VOLTS) fault = 5;
else if(!ac_good) fault = 6;
else if(!phase_lock) fault = 7;
else fault = 0;
}
if (fault) output_high(BELL); // turn on Bell neu co loi
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 122

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp else output_low(BELL); // turn off Bell neu khong loi
return(fault);
}
// Hien thi trang thai len mang hinh LCD
void print_results(void) {
if (state == WAIT) {LCD_putcmd(0x01);printf(LCD_PUTCHAR, "Wait");}
else if (state == TRACK) {LCD_putcmd(0x01);printf(LCD_PUTCHAR, "Track");}
else if (state == PP_FAULT) {LCD_putcmd(0x01);printf(LCD_PUTCHAR,"Fault
%d", fault);}
else if (state == SYNC) {LCD_putcmd(0x01);printf(LCD_PUTCHAR, "Sync ");}
}
// Thuat toan dieu chinh dien ap bang P so
void update_adj(int16 adjust) {
if(adj16 > MAX_ADJ16) adj16 = MAX_ADJ16;
else if(adj16 < MIN_ADJ16) adj16 = MIN_ADJ16;
else adj16 += adjust;
}
// Chuong trinh On/Off he thong
void TURN_ON()
{output_low(SD_DC);output_low(SD);pp_switch = ON;}
void TURN_OFF()
{output_high(SD_DC);output_high(SD);pp_switch = OFF;}
// Ngat bao qua dong o phia dau vao
#int_EXT
void ngat_quadong()
{ clear_interrupt(INT_EXT);
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 123

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp FAULT_MAX_DC_AMPS=1;
TURN_OFF();
}
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 124

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp
M c L cụ ụ
CH NG 1: C S LÝ THUY T V NĂNG L NG GIÓƯƠ Ơ Ở Ế Ề ƯỢ ................................................................................................................................................2
1.1. Khái quát ti m năng năng l ng gió Vi t Namề ượ ở ệ .................................................2
1.2. M c tiêu c a v n đ năng l ng gió trong ch ng trình năng l ng m iụ ủ ấ ề ượ ươ ượ ớ ...2
1.3. Tình hình s d ng năng l ng gió trên các n c và Vi t Namử ụ ượ ướ ệ ........................2
1.3.1. các n c trên th gi iỞ ướ ế ớ ........................................................................................2
1.3.2. Vi t NamỞ ệ ..............................................................................................................2
1.4. Gi i thi các lo i h th ng gió, các h ng gióớ ệ ạ ệ ố ướ .....................................................3
1.4.1. Các lo i h th ng gióạ ệ ố ..............................................................................................3
1.4.2. Các c p gióấ ...............................................................................................................3
1.5. Hi n t ng gia t c dòng không khíệ ượ ố ........................................................................3
1.6. Năng l ng gióượ ............................................................................................................4
CH NG 2: ƯƠ T NG QUAN CÁC PH NG PHÁP CHUY N Đ I PHONG ĐI N SANG ĐI N XOAY CHI UỔ ƯƠ Ể Ổ Ệ Ệ Ề ...................................................................5
2.1. Bi n Đ i DC ế ổ DC :.....................................................................................................6
2.1.1. B chuy n đ i ki u FLYBACK ộ ể ổ ể :..............................................................................6
2.1.2. B chuy n đ i ki u FORWARDộ ể ổ ể :.............................................................................8
2.1.3. B chuy n đ i ki u PUSH-PULLộ ể ổ ể :...........................................................................9
2.2. Bi n Đ i DC ế ổ AC :..................................................................................................11
2.2.1. S đ n a c uơ ồ ử ầ :......................................................................................................11
2.2.2. S đ c uơ ồ ầ :.............................................................................................................12
2.3. Kỹ thu t đi u bi n đ r ng xung ki u Sine hóa (SPWM)ậ ề ế ộ ộ ể ................................13
2.3.1. S c n thi t c a b ngh ch l u đi u bi n đ r ng xungự ầ ế ủ ộ ị ư ề ế ộ ộ :.................................13
2.3.2. Nguyên lý ho t đ ng c a ngh ch l u PWMạ ộ ủ ị ư :.......................................................13
2.3.3. Sin hoá PWM..........................................................................................................15
2.3.4. Nguyên t c ho t đ ng b ngh ch l u c u đi u bi n đ r ng xung đ n c cắ ạ ộ ộ ị ư ầ ề ế ộ ộ ơ ự ....16
2.4. Phương Án Thiết Kế :.................................................................................................20
CH NG 3: TÔNG QUAN V C U TRÚC VÀ CH C NĂNG C AƯƠ Ề Ấ Ứ Ủ VI ĐI U KHI N PIC 18F4431Ề Ể ........................................................................22
3.1. Gi i thi u chung :ớ ệ ......................................................................................................22
3.1.1. Nh ngữ đặc điểm nổi b cậ PIC18F4431:..............................................................22
3.1.2. Nh ngữ đặc điểm chính:.......................................................................................23
3.2. Tóm T t C u Trúc Ph n C ngắ ấ ầ ứ :..............................................................................24
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 125

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 3.2.1. Sơ đồ chân MCU PIC18F4431 :............................................................................24
3.2.2. Sơ đồ các kh iố chức năng :................................................................................25
3.2.3. Chức năng c aủ t ngừ chân:..................................................................................26
3.3. Module PWM Chuyên D ng ụ :..................................................................................30
3.3.1. Power control PWM module :.............................................................................30
3.3.2. Các thanh ghi đi uề khiển:..................................................................................33
3.3.3. PWM Time Base:..................................................................................................34
3.3.4. PWM Time Base Interrrupts:..............................................................................36
3.3.5. PWM Period :........................................................................................................40
3.3.6. PWM duty cycle:...................................................................................................41
3.3.7.Bộ t oạ thời gian dead time:................................................................................43
3.3.8. Analog to digital converter module (A/D):.........................................................45
CH NG 4 : THI T K PH N C NG CHO H TH NG PHONG ĐI NƯƠ Ế Ế Ầ Ứ Ệ Ố Ệ ..................................................................................................................................48
4.1. Thi t K Kh i Bi n Đ i DC-DC:ế ế ố ế ổ .............................................................................48
4.1.1. Ch n MOSFETọ :.......................................................................................................49
4.1.2. Thi t k máy bi n áp :ế ế ế ..........................................................................................50
4.1.3. B l c đ u ra LC :ộ ọ ầ ..................................................................................................53
4.1.4. M ch đi u khi n và b o vạ ề ể ả ệ :................................................................................53
4.2. Thi t K Kh i Bi n Đ i DC-AC ế ế ố ế ổ :.............................................................................59
4.2.1. Ch n thi t b bán d n đóng c t m ch ngh ch l u :ọ ế ị ẫ ắ ạ ị ư ..........................................59
4.2.2. M ch lái MOSFET :ạ .................................................................................................61
4.2.3. B l c LC :ộ ọ ..............................................................................................................66
4.2.4. M ch đi u khi n và b o vạ ề ể ả ệ :................................................................................67
4.3. Th c Hi n Ph n C ng :ự ệ ầ ứ ...........................................................................................69
4.3.1. Các ph n m ch c a b chuy n đ i DC-DC :ầ ạ ủ ộ ể ổ ........................................................69
4.3.2. S đ m ch ngu n nuôiơ ồ ạ ồ ........................................................................................70
4.3.3. Các ph n m ch c a b chuy n đ i DC-ACầ ạ ủ ộ ể ổ ..........................................................70
4.3.4. S đ m ch hòa đ ng bơ ồ ạ ồ ộ......................................................................................72
4.3.5. Ph n m ch giao ti p ng i dùngầ ạ ế ườ :......................................................................73
CH NG ƯƠ 5: L P TRÌNH HO T Đ NG CHO VI ĐI U KHI N PIC 18F4331Ậ Ạ Ộ Ề Ể ...............................................................................................................
74
5.1. Bi u Đ Tr ng Thái Ho t Đ ng C a H Th ng :ể ồ ạ ạ ộ ủ ệ ố ...............................................74
5.2. Th c Hi n Khâu Ngh ch L u B ng Ph ng Pháp Đi u Bi n Đ R ng Xung ự ệ ị ư ằ ươ ề ế ộ ộKi u Sine Hóa :ể ..................................................................................................................75
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 126

GVHD: PGS.TS. Đoàn Quang Vinh Đồ án tốt nghiệp 5.2.1 Cách t o xung PWM ki u sin hóa :ạ ể ........................................................................76
5.2.2 R i r c hóa b ng sine:ờ ạ ả ...........................................................................................79
5.3. Ch ng Trình Firmware Cho Vi Đi u Khi n Pic 18F4431 :ươ ề ể .............................80
CH NG 6: K T QU Đ T Đ CƯƠ Ế Ả Ạ ƯỢ ..................................................................................................................................................................................81
6.1. Mô ph ng đi n áp đ u ra b bi n đ i :ỏ ệ ầ ộ ế ổ ...............................................................81
6.2. Mô hình m ch th c t :ạ ự ế ............................................................................................82
6.3. K t lu n :ế ậ ....................................................................................................................88
TÀI LI U THAM KH OỆ Ả ..........................................................................................................................................................................................................88
Ph l c 1: Ch ng trình cho pic 18f4431ụ ụ ươ ........................................................................................................................................................................................... 89
SVTH: Nguyễn Đức Hải – Lớp 09D3 Trang 127






















![[S15] Quynh Anh _ Bai tot nghiep](https://img.pdfslide.us/doc/110x75/55c248e7bb61eb58228b4784/s15-quynh-anh-bai-tot-nghiep.jpg)





