Embed Size (px)
Citation preview

Distributed Perception by Collaborative Robots
Ramyad Hadidi∗, Jiashen Cao∗, Matthew Woodward∗,Michael S. Ryoo∗∗, and Hyesoon Kim∗
*Georgia Institute of Technology** EgoVid Inc.
Spotlight Talk

Deep Learning (DL) and Robots 2
} Robots need process lots of raw data.} Visual, Sounds, Temperature, …
} To act, they need to understand their environment.} How should they process complex raw data?
} Use deep learning!
IROS 2018Distributed Perception by Collaborative Robots
?!Balloon

DL Computation is Heavy 3
} But deep neural network are computationallyintensive and resource hungry.
} Models have large memory footprint.} Latency for single image inference is high.
} Robots need the result fast and in real time!} Then how can resource-constrained robots use DL to
understand their surroundings?
IROS 2018Distributed Perception by Collaborative Robots

Let’s Collaborate 4
} Usually resource-constraint robots share their environment.} Not all robots need to perform computations at same time.} So what if they share their knowledge and help each other?
IROS 2018
(a) Single Robot
?!
S
Balloon
Computation Domain Computation Domain
(b) Collaborative Robots
Distributed Perception by Collaborative Robots

Our Work Overview 5
} We have proposed a technique to efficiently distribute DNN-based models.
} We also have proposed an algorithm to deploy distributed models onto robots system with Raspberry Pis.
IROS 2018Distributed Perception by Collaborative Robots
Wifi
(a) GoPiGo Robot (b) Our Distributed Robot System
GoPiGo
Balloon

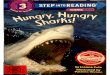
Results 6
} We distributed and deployed :} Two image recognition models (VGG16 and AlexNet)} One video recognition model
IROS 2018Distributed Perception by Collaborative Robots
fc_2 (4k)fc_3 (1k)
Merge
CNN Layers
fc_1(2k)
fc_1(2k) fc_2 (4K)fc_3 (1k)
Merge
fc_1(2k)
fc_1(2k)
CNN Block 1,2,3,4,5
Alexnet: VGG16:
224
2243
33
64 4092 10
0040
92
conv2D fc_1
fc_2
fc_3
33
64
33
33
112
112
128
33
128
conv2Dmaxpool conv2D
conv2Dmaxpool
33
56256
conv2D
56
2x
33
256
conv2Dmaxpool
33
28512
conv2D
28
conv2Dmaxpool
33
512
33
14512
conv2D
14
maxpool
33
512
2x2x conv2D
Block 1 Block 2 Block 3 Block 4 Block 5Input
220
220
3
11
11
55
5548
55
128
27
27
3
192
13
133
3
192
13
133
3
128
13
133
3
40921000
4092
conv2Dmaxpool
conv2Dmaxpool
conv2D conv2Dconv2Dmaxpool
fc_1
fc_2
fc_3
3
Convolution (CNN) Layers

Results (Cont’d.) 7
} We successfully deployed the distributed DNN system on up to 12 robots
} We got comparable results with a high-end embedded GPU platform, Nvidia Tegra TX2} Acceptable inference speed} Better energy consumption
IROS 2018Distributed Perception by Collaborative Robots