Embed Size (px)
Citation preview

1
Distributed optimization decomposition for jointeconomic dispatch and frequency regulation
Desmond Cai∗, Enrique Mallada† and Adam Wierman††
Abstract—Economic dispatch and frequency regulation aretypically viewed as fundamentally different problems in powersystems and, hence, are typically studied separately. In this paper,we frame and study a joint problem that co-optimizes bothslow timescale economic dispatch resources and fast timescalefrequency regulation resources. We show how the joint problemcan be decomposed without loss of optimality into slow andfast timescale sub-problems that have appealing interpretationsas the economic dispatch and frequency regulation problemsrespectively. We solve the fast timescale sub-problem using adistributed frequency control algorithm that preserves networkstability during transients. We solve the slow timescale sub-problem using an efficient market mechanism that coordinateswith the fast timescale sub-problem. We investigate the perfor-mance of our approach on the IEEE 24-bus reliability test system.
Index Terms—Economic dispatch, frequency regulation, opti-mization decomposition, markets.
I. INTRODUCTION
ONE of the major objectives of every Independent SystemOperator (ISO) is to schedule generation to meet demand
at every time instant [2]–[4]. This is a challenging task –it involves responding rapidly to supply-demand imbalances,minimizing generation costs, and respecting operating limi-tations (such as ramp constraints, capacity constraints, andline constraints). Due to the complexity of this global systemoperation problem, it is typically divided into two separateproblems: economic dispatch, which focuses on control ofslower timescale resources and is solved using market mech-anisms, and frequency regulation, which focuses on controlof faster timescale resources and is solved using engineeredcontrollers. Economic dispatch and frequency regulation aretypically studied independently of each other.
Economic dispatch operates at the timescale of 5 minutesor longer and focuses on cost efficiency. In particular, the
∗Desmond Cai is with Department of Electrical Engineering, CaliforniaInstitute of Technology. Email: [email protected].
†Enrique Mallada is with the Department of Electrical and ComputerEngineering, Johns Hopkins University. Email: [email protected].
††Adam Wierman is with the Department of Computing andMathematical Sciences, California Institute of Technology. Email:[email protected].
This work was supported by ARPA-E grant DE-AR0000226, Los AlamosNational Lab through an DoE grant DE-AC52-06NA25396, DTRA throughgrant HDTRA 1-15-1-0003, Skoltech, NSF grant 1545096 as part of theNSF/DHS/DOT/NASA/NIH Cyber-Physical Systems Program, NSF grantNETS-1518941, NSF grant EPAS-1307794, NSF CPS grant CNS 1544771,Johns Hopkins E2SHI Seed Grant, Johns Hopkins WSE startup funds, andthe Agency for Science, Technology, and Research (A*STAR). A preliminaryand abridged version has appeared in [1].
The authors would like to thank Ben Hobbs from John Hopkins and StevenH. Low from Caltech for insightful discussions.
economic dispatch problem seeks to optimally schedule gen-erators to minimize total generation costs. Economic dispatchhas a long history [2], [5]–[9]. It is currently implementedusing a market mechanism known as supply function bidding.In this mechanism, generators submit supply functions to theISO which specify (as a function of price) the quantity agenerator is willing to produce. The ISO solves a centralizedoptimization problem (over single or multiple time periods) toschedule generators to minimize system costs while satisfyingdemand and slow timescale operating constraints (such as lineconstraints, capacity constraints, ramping constraints, securityconstraints, etc.). Each generator is compensated at the loca-tional marginal price (LMP) which reflect the system cost ofserving an incremental unit of demand at its node.
Frequency regulation operates at a faster timescale (from afew minutes to 30 seconds) and focuses on stability ratherthan efficiency. In particular, the ISO seeks to restore thenominal frequency in the system by rescheduling fast rampinggenerators. Frequency regulation has a long history [3], [10],[11]. It is currently implemented by a mechanism known asAutomatic Generation Control (AGC). In this mechanism, theISO computes the aggregate generation that would rebalancepower within each independent control area (and hence restorenominal frequency) and allocates the imbalance generationamong generators based on the solution of the previouseconomic dispatch run [2]. These allocations determine the set-points in a distributed control algorithm that drives the powersystem to a stable operating point using local information onfrequency deviations. Similar to dispatch resources, regulationresources are compensated at the applicable LMP. Note that,since the economic dispatch mechanism runs every 5 minutes,the applicable LMPs would be those from the most recenteconomic dispatch run.
A. Contributions of this paper
While economic dispatch and frequency regulation eachhave large and active literatures, these literatures are typicallydisparate, with the exception of studies on the design ofhierarchical control in power systems [12]–[17]. The latterstudies typically propose solutions to efficiently integrate pri-mary, secondary (frequency regulation), and tertiary (economicdispatch) control. Another related stream of literature involvesthe analysis and design of frequency regulation controllers(including AGC) that converge to the solution of a costminimization problem [18], [19]. However, these studies donot explain how to integrate the controllers with slowertimescale dispatch mechanisms. To date, we are not aware of

2
any analysis of whether the existing combination of economicdispatch and frequency regulation solves the global systemoperator’s goal of dispatching generation resources efficientlyacross both timescales. The goal of this paper is to study thisas well as present one framework for a principled top-downapproach for the design of economic dispatch and frequencyregulation.
Our main result provides an initial answer. In the contextof a DC power flow model and two classes of generators(dispatch and regulation), we show that the global system oper-ator’s problem can be decomposed into two sub-problems thatcorrespond to the economic dispatch and frequency regulationtimescales, without loss of optimality, as long as the ISO isable to estimate the difference between the average LMP inthe frequency regulation periods and the LMP in the economicdispatch period (Theorem 1). This result can be viewed asa first-principles justification for the existing separation ofpower systems control into economic dispatch and frequencyregulation problems. Moreover, this result provides a guideto modify the existing architecture to optimally control powersystems across timescales. In particular, using this result, wedesign an optimal control policy for frequency regulation andan optimal market mechanism for economic dispatch, in a waysuch that the control and market mechanisms jointly solvethe global system operator’s problem. Our mechanims differfrom existing economic dispatch and frequency regulationmechanisms in important ways.
In the case of frequency regulation (Section IV), our mech-anism has a key advantage over the AGC mechanism in thatour mechanism is efficient. The frequency regulation controllerproposed in this paper is built on the distributed controllerin [20], [21] and controls generation based on informationabout generators’ costs in a way such that the power systemconverges to an operating point that minimizes system costs.On the other hand, AGC allocates generation based on par-ticipation factors, which might not reflect actual costs, andhence the resulting allocation might not be efficient. In [18],the authors proposed a modification of the participation factorsso that the AGC mechanism is cost efficient. However, unlikeour mechanism, the mechanism in [18] does not respect lineconstraints. Another related work is [19], in which the authorsshowed that droop controllers can be designed to convergeasymptotically to the solution of a cost minimization problem.However, their mechanism does not respect line constraints orcapacity constraints.
In the case of economic dispatch (Section V), our mecha-nism has a key advantage over the existing economic dispatchoperations in that it coordinates efficiently with the frequencyregulation timescale. This coordination does not require ad-ditional communication in the market beyond the existingmechanism used in practice. This coordination involves twomain components. First, our economic dispatch mechanismcommunicates the supply function bids from the generatorsto the frequency regulation mechanism, which uses them inthe distributed controllers to allocate frequency regulationresources efficiently. In contrast, the AGC mechanism allocatesfrequency regulation resources without regard to generationcosts. Second, our economic dispatch mechanism accounts
time
12
3
4
5
6
7
89
10
1112131415
16
1 2 3 4 5
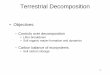
Fig. 1: Example of a scenario tree with S = 16 outcomes overK = 5 periods. The outcomes are numbered 1, . . . , S.
for the value that economic dispatch resources provide tofrequency regulation. It does so by adjusting the resource costsin the economic dispatch objective based on the differencebetween the LMP in the frequency regulation periods and thatin the economic dispatch period. In contrast, the existing eco-nomic dispatch objective does not perform this adjustment andhence might allocate economic dispatch resources inefficiently.
In practice, the ISO is unlikely to be able to estimateexactly the adjustment it should make to the economic dis-patch objective. In Section VI, we investigate numerically thepotential benefits of our proposed mechanism on the IEEE24-bus reliability test system.
II. SYSTEM MODEL
Our aim is to understand how the combination of economicdispatch and frequency regulation can dispatch generationresources efficiently across both timescales. To this end, weformulate a model of the global objective that includes balanc-ing supply and demand at both timescales. We use a DC powerflow model and consider two generation types – dispatch andregulation – which differ in responsiveness.
Consider a connected network consisting of a set of nodesN and a set of links L. We focus on a single economic dispatchinterval of the real-time market which is typically 5 minutesin existing markets. We partition this time interval into Kdiscrete periods numbered 1, . . . ,K. In general, the length ofeach period may range from as little as seconds to as long asminutes. However, in this work, we focus on the case whereeach period is on the order tens of seconds.
A. Stochastic demand
We use a stochastic demand model motivated by the frame-works in [22]–[24]. Assume that there is a set of possibledemand outcomes S that can be described by a scenario tree(an example is given in Fig. 1). For each outcome s ∈ S, letds,n ∈ R denote the real power demand at node n ∈ N andds := (ds,n, n ∈ N) ∈ RN denote the vector of demands atall nodes. In addition, let κ(s) ∈ 1, . . . ,K denote the periodof this outcome and ps denote the probability of this outcomeconditioned on the information that the period is κ(s). Hence,∑
s|κ(s)=k ps = 1 for each k ∈ 1, . . . ,K. Without lossof generality, we assume that κ(1) = 1 and p1 = 1. That is,there exists an outcome labeled 1 ∈ S associated with period1 and the demand in that period is deterministic.

3
B. Generation
We assume that each node n ∈ N has two generators– a dispatch generator and a regulation generator – wherethe regulation generator is more responsive than the dispatchgenerator.1 To model the differing responsiveness, we assumethat the dispatch generator produces at a constant level overthe entire economic dispatch interval while the regulationgenerator may change its production level every period afteruncertain demand is realized [25]. Our results extend to thesetting where the dispatch generator has ramp constraints;the latter can be modelled by linearly prorating its allocationover the entire economic dispatch interval. Since this featuredoes not provide new insights, and yet introduces significantcomplexity to the notations, we assume in this work that thedispatch generator is only subject to instantaneous capacityconstraints. Formally, we assume that the dispatch generatorproduces qdn ∈ R in all outcomes, and the regulation generatorproduces qrn ∈ R in period 1 and qrn + rrs,n ∈ R in eachsubsequent outcome s ∈ S \ 1. Hence, qrn and rrs,n can beinterpreted as the regulation generator’s setpoint and recourserespectively. To simplify notations, we define a dummy vari-able rr1,n := 0 so that we may write the regulation generator’sproduction in period 1 as qrn + rr1,n. We assume that theregulation and dispatch generators have capacity constraints[¯qrn, q
rn] and [
¯qdn, q
dn] respectively, and incur costs crn(q
rn+rrs,n)
and cdn(qdn) respectively in period κ(s), where the functions
crn : [¯qrn, q
rn]→R+ and cdn : [
¯qdn, q
dn]→R+ are strictly convex
and continuously differentiable.Define vectors qr := (qrn, n ∈ N), rrs := (rrs,n, n ∈ N),
qd := (qdn, n ∈ N),¯qr := (
¯qrn, n ∈ N),
¯qd := (
¯qdn, n ∈ N),
qr := (qrn, n ∈ N), qd := (qdn, n ∈ N). Then the generationconstraints in outcome s ∈ S are given by:
¯qd ≤ qd ≤ qd, (1)
¯qr ≤ qr + rrs ≤ qr. (2)
We also let the vector rr := (rrs, s ∈ S).
C. Network constraints
Note that qd+qr+rds−ds is the vector of nodal injectionsfor s ∈ S. Thus, the supply-demand balance constraint is:
1>(qd + qr + rrs − ds) = 0, (3)
where 1 ∈ RN denotes the vector of all ones.We adopt the DC power flow model for line flows. Let θs,n
denote the phase angle of node n. Without loss of generality,assign each link l an arbitrary orientation and let i(l) and j(l)denote the tail and head of the link respectively. Let Bl denotethe sensitivity of the flow with respect to changes in the phasedifference θs,i(l) − θs,j(l) and let vs,l denote its power flow.Define the vectors θs := (θs,n, n ∈ N) and vs := (vs,l, l ∈ L)
1Our results may be extended to settings where a node has more than oneof each type of generator, or there is only one type of generator at a node,or there are no generators at a node. The assumption that each node hasexactly one of both types of generators is made to simplify the notations andderivations. In our case study, we will validate our approach via simulationson the IEEE 24-bus reliability test system, in which certain nodes have onlyone type of generator or have no generator.
and the matrix B := diag(Bl, l ∈ L). Then, the line flows aregiven by vs = BC>θs where C ∈ RN×L is the incidencematrix of the directed graph. And the injections are:
qd + qr + rrs − ds = Cvs = Lθs, (4)
where L := CBC>.Note that (3) and (4) are equivalent. For any set of injections
that satisfy (3), we can always find θs that satisfies (4).Conversely, since 1>C = 0, any injections that satisfy (4)also satisfy (3). Hence, the line flows can be written in termsof the power injections:
vs = BC>L†(qd + qr + rrs − ds),
where L† denotes the pseudo-inverse of L. Let H := BC>L†.Let fl denote the capacity of line l and define the vector f :=(fl, l ∈ L). Then the line flow constraints are:
−f ≤ H(qd + qr + rrs − ds
)≤ f . (5)
To simplify notations, we define the set Ω(ds) of feasiblegeneration for a given demand vector ds as:
Ω(ds) :=(qd,qr, rrs) : (1), (2), (3), (5) holds
.
D. System operator’s objective
The global system operator’s objective is to allocate the dis-patch and regulation generations (qd,qr, rr) to minimize theexpected cost of satisfying demand and operating constraints.This is formalized as follows.
SY STEM : minqd,qr,rr
∑s∈S
ps∑n∈N
(cdn(q
dn) + crn(q
rn + rrs,n)
)s.t. (qd,qr, rrs) ∈ Ω(ds), ∀s ∈ S,
rr1 = 0.
This optimization is solved at the beginning of the economicdispatch interval. We assume that this optimization is feasible.Note that SY STEM differs from the existing economicdispatch mechanism, which minimizes the costs of satisfyingthe forecasted demand at the end of the economic dispatchinterval. Observe that SY STEM is a stochastic optimizationproblem. Although it is in general computationally challengingto solve, the design of algorithms for such problems is anactive research area in the power systems and optimizationcommunities [26], [27]. The goals of this work, however, areto formulate a global system operation problem and decom-pose it into subproblems in a way that provide insights intooptimal design of economic dispatch and frequency regulationmechanisms.
Let λs and (¯µs, µs) be the Lagrange multipliers associated
with constraints (3) and (5) respectively in SY STEM . Then,the function π : R× R2L
+ → RN , defined by:
π(λs,¯µs, µs) := λs1+H>(
¯µs − µs), (6)
gives the nodal prices in outcome s ∈ S.

4
III. ARCHITECTURAL DECOMPOSITION
Our main result is a decomposition of SY STEM intosetpoint and recourse sub-problems. Importantly, our decom-position identifies a rigorous connection between the setpointand recourse sub-problems that ensures that the combinationsolves SY STEM . In particular, our decomposition dividesSY STEM into sub-problems ED and FR defined by:
ED(d1) : minqd,qr
∑n∈N
(Kcdn(q
dn) +Kcrn(q
rn)− δnq
dn
)s.t. (qd,qr,0) ∈ Ω(d1),
FR(qd,qr,ds) : minrrs
∑n∈N
crn(qrn + rrs,n)
s.t. (qd,qr, rrs) ∈ Ω(ds),
where δ ∈ RN is a constant. ED(d1) is implemented in timeperiod 1 and FR(qd,qr,ds) is implemented in subsequenttime periods κ(s) > 1.
We denote the first optimization problem by ED, since itoptimizes only generation setpoints (qd,qr) assuming con-stant demand d1 over the K time periods, and hence it is onthe same timescale as the existing economic dispatch mech-anism. We denote the second optimization problem by FR,since it optimizes regulation generators’ recourse productionrrs in subsequent time periods, and hence it is on the sametimescale as the existing frequency regulation mechanism.
Definition 1. We say that SY STEM can be optimallydecomposed into ED-FR if (qd,qr, rr) is an optimal so-lution to SY STEM if and only if rr1 = 0, (qd,qr) is anoptimal solution to ED(d1), and rrs is an optimal solution toFR(qd,qr,ds) for all s ∈ S.
Theorem 1 (Decomposition). Let λs and (¯µs, µs) be any
Lagrange multipliers associated with constraints (3) and (5)respectively in SY STEM .(a) If δ is the average, over all time periods, of the difference
between the expected nodal prices in each period and thatin period 1, that is, for each n ∈ N ,
δn =∑s∈S
ps(πn(λs,
¯µs, µs)− πn(λ1,
¯µ1, µ1)
), (7)
then SY STEM can be optimally decomposed intoED-FR.
(b) If SY STEM can be optimally decomposed intoED-FR, then for all n such that
¯qdn < qdn < qdn and
¯qrn < qr1,n < qrn, (7) holds.
The proof of Theorem 1 is given in the Appendix. Theresult follows from analyzing the Karush-Kuhn-Tucker (KKT)conditions of the system operator’s problem and those of EDand FR. As SY STEM , ED, and FR are all convex, theKKT conditions are necessary and sufficient for optimality.Upon substituting (7) into the KKT conditions, one can showthat any solution to the KKT conditions of SY STEM isalso a solution to the KKT conditions of ED-FR, and viceversa. As mentioned, we denote the two sub-problems byED and FR because they focus on the economic dispatchand frequency regulation timescales respectively. Hence, thesesub-problems can serve as guides for the optimal design of
economic dispatch and frequency regulation mechanisms. Theinsights are immediate in the case of economic dispatch andwe show how ED leads to an improved market mechanismin Section V. However, the insights may not be as clear inthe case of frequency regulation. We show in Section IV thatFR can in fact be solved via distributed frequency controlalgorithms, although these algorithms deviate from currentpractice that do not optimize generation costs.
The most important feature of Theorem 1 is that, oneway to choose generation setpoints optimally at the economicdispatch timescale, is to include, in the optimization objective,an offset of the dispatch generators’ marginal costs by theexpected changes in nodal prices during the frequency regu-lation timescale. The latter can be interpreted as the expectedchanges in the marginal value of dispatch generation. Hence,if the latter is zero, then generation setpoints can be chosenoptimally at the economic dispatch timescale without regardto the behavior of the system in the frequency regulationtimescale [1].
A byproduct of our decomposition is the insight that thestochastic optimization problem SY STEM may be solvedby solving a sequence of deterministic subproblems ED(d1)and FR(qd,qr,ds) if the system operator is able to predictthe RHS of (7). Note that ED(d1) has the same complexityas the existing economic dispatch mechanism; and we willshow in the next section that FR(qd,qr,ds) can be solvedusing a distributed frequency control algorithm. Therefore, thecomputations of the subproblems have the same complexity asexisting operations.
An important extension of this work is to design algorithmsto iteratively estimate the RHS of (7) online. Such approachesresemble value function iterations in dynamic programming.Also important is to understand the suboptimality of thesolutions under estimation errors in the RHS of (7). Notethat negative estimation errors cause ED(d1) to use less thanoptimal dispatch resources (and more than optimal regulationresources) and vice versa. In such situations, the dispatch gen-eration qd might not be optimal, and therefore FR(qd,qr,ds)might not be feasible. To ensure that FR(qd,qr,ds) isfeasible, we may modify ED(d1) into a robust optimizationproblem by adding constraints (qd,qr, rrs) ∈ Ω(ds) for alls ∈ S \ 1. The size of such a problem is exponential in Sbut can be reduced using the technique in [28]. Note that thisshould not be viewed as a drawback of our decomposition,as the current practice based on AGC might also not befeasible. In practice, the risks of infeasibility are mitigatedusing reserves. Moreover, our decomposition has the advan-tage that it coordinates the economic dispatch and frequencyregulation resources efficiently, and hence, may reduce reserverequirements.
Theorem 1 provides a rigorous way to think about archi-tectural design of power networks. Theorem 1 is close inspirit to work in communication networks that use optimiza-tion decomposition to justify and optimize protocol layer-ing [29]–[31]. In the latter, different protocol layers coordinateby communicating primal and dual variables between sub-optimization problems. It is an interesting open direction asto whether these mechanisms can be applied to coordinate

5
between ED and FR, since the sub-optimizations in protocollayering use instantaneous primal and dual variables while EDuses expected prices.
IV. DISTRIBUTED FREQUENCY REGULATION
This section illustrates how to implement the solution toFR using distributed frequency regulation controllers. Besidesachieving optimality, a practical implementation should pre-serve network stability, be robust to unexpected system events,aggregate network information in a distributed manner, andsatisfy constraints (2), (3) and (5). The distributed algorithmthat we provide in this section satisfies all the above character-istics. It can be interpreted as performing distributed frequencyregulation by sending different regulation signals to each bus.
A. Dynamic model
Before introducing our algorithm we add dynamics to oursystem model to describe the system behavior within a singletime period. Let t denote the time evolution within the timeperiod of outcome s, and assume without loss of generality thatt ∈ (k, k + 1] where k = κ(s). Let rrs(t) := (rrs,n(t), n ∈ N)denote the recourse quantities generated by the regulationgenerators at time t. For the purpose of the analysis, weassume that dispatch generation and demand do not changewithin the time period. And we will use simulations to studythe performance of the proposed mechanism in a setting wheredemand is changing continuously.
Then, the system changes within the time period are gov-erned by the swing equations which we assume to be:
θs(t) = ωs(t); (8a)
Mωs(t) = qd + qr + rrs(t)− ds −Dωs(t)− Lθs(t), (8b)
where ωs(t) := (ωs,n(t), n ∈ N) are the frequency deviationsfrom the nominal value at time t, θs(t) := (θs,n(t), n ∈ N)are the phase angles at time t, M := diag(M1, . . . ,MN )where Mn is the aggregate inertia of the generators at noden, and D := diag(D1, . . . , DN ) where Dn is the aggregatedamping of the generators at node n. The notation x denotesthe time derivative, i.e. x = dx/dt. Equation (8) is a linearizedversion of the nonlinear network dynamics [3], [32], andhas been widely used in the design of frequency regulationcontrollers. See, e.g., [11], [33].
B. Distributed frequency regulation
We now introduce a distributed, continuous-time algorithmthat provably solves FR while preserving system stability. Oursolution is based on a novel reverse and forward engineeringapproach for distributed control design in power systems [18],[21], [34]–[37]. The algorithm operates as follows. Eachregulation generator n updates its power generation using
rrs,n(t) = [cr′−1n (−ωs,n(t)− πr
s,n(t))]qrn−qrn
¯qrn−qrn
, (9)
where cr′n (x) = ∂∂xc
rn(x) and cr′−1
n denotes its inverse. Theprojection [r]
qrn−qrn
¯qrn−qrn
ensures that¯qrn − qrn ≤ r ≤ qrn − qrn (or
equivalently¯qrn ≤ r+ qrn ≤ qrn) and πr
s,n(t) is a control signalgenerated using:
DFR : πrs(t) = ζπ
(qd + qr + rrs(t)− ds −Lφs(t)
); (10a)
˙µs(t) = ζµ[BC>φs(t)− f
]+µs; (10b)
¯µs(t) = ζ¯
µ[− f −BC>φs(t)
]+¯µs; (10c)
φs(t) = χφ(Lπp
s(t)−CB(µs(t)−¯µs(t))
), (10d)
where ζπ := diag(ζπ1 , . . . , ζπN ), ζµ := diag(ζ µ1 , . . . , ζ
µL),
ζ¯µ := diag(ζ¯
µ
1 , . . . , ζ¯µ
L), χφ := diag(χφ1 , . . . , χ
φN ) denote
the respective control gains. The element-wise projection[y]+x := ([yn]
+xn, n ∈ N) ensures that the dynamics x = [y]+x
have a solution x(t) that remains in the positive orthant, thatis, [yn]
+xn
= 0 if xn = 0 and yn < 0, and [yn]+xn
= ynotherwise.
The proposed solution (9) – (10) can be interpreted asa frequency regulation algorithm in which each regulationgenerator receives a different regulation signal (9) dependingon its location in the network. The key step in the designof DFR is reformulating FR into the following equivalentoptimization problem:
FR′(qd, qr,ds) :
minrrs,ωs,vs,φs
∑n∈N
(crn(q
rn + rrs,n) +Dnω
2s,n/2
)s.t. qd + qr + rrs − ds −Dωs = Cvs; (11a)
qd + qr + rrs − ds = Lφs; (11b)
− f ≤ BC>φs ≤ f ; (11c)
¯qr ≤ qr ≤ qr. (11d)
Recall from Section II-C that vs denote line flows. Constraint(11a) is reformulated from the per node supply-demand bal-ance constraint (4), and makes explicit the fact that, wheneversupply and demand do not match, the mismatch is compen-sated by a change in the frequency. Constraint (11b) ensuresthat ωs = 0 at the optimal solution so that supply and de-mand are balanced. Constraint (11c) imposes line flow limits.However, instead of using actual line flows vs, these limitsare imposed on virtual flows BC>φs, which are identical toline flows at the optimal solution [21].
It can be shown that FR′ has a primal-dual algorithmthat contains the component (8) resembling power networkdynamics and the components (9) – (10) that can be imple-mented via distributed communication and computation. Thisnew problem FR′ also makes explicit the role of frequencyin maintaining supply-demand balance.
The next proposition formally relates the optimal solutionsof FR and FR′ and guarantees the optimality of (9) – (10).
Proposition 1 (Optimality). Let rrs and (rr′s ,ω′s,v
′s,φ
′s) be
optimal solutions of FR and FR′ respectively. Then, thefollowing statements are true: (i) Frequency restoration: ω′
s =0; (ii) Generation equivalence: rrs = rr′s ; (iii) Line flowequivalence: H
(qd + qr + rrs − ds
)= BC>φ′
s. Moreover,there exists θ′
s ∈ RN and y′s ∈ RL, satisfying Cy′
s = 0,such that v′
s = BC>θ′s + y′
s and BC>φ′s = BC>θ′
s. And(rr′s ,ω
′s,θ
′s,φ
′s,π
r′s ,
¯µ′
s, µ′s) is an equilibrium point of (8) –

6
(10) if and only if (rr′s ,ω′s,v
′s,φ
′s,π
r′s ,
¯µ′
s, µ′s) is a primal-
dual optimal solution of FR′, where ω′s, πr′
s , and (¯µ′
s, µ′s)
are the Lagrange multipliers associated with constraints (11a),(11b), and (11c), respectively.
The proof of Proposition 1 is given in the Appendix. Whatremains is to guarantee the convergence of the distributedfrequency regulation algorithm.
Proposition 2 (Convergence). If crn is twice continuous dif-ferentiable with cr′′n ≥ α > 0 (i.e., α-strictly convex) andcrn(q
rn + rrs,n)→+∞ as qrn + rrs,n →
¯qrn, q
rn, then rrs(t) in
(8) – (10) converge globally to an optimal solution of FR.
The proof of Proposition 2 follows from [21] anduses the machinery developed in [38] to handle projec-tions (10b) – (10c). By substituting the line flows vs(t) =BC>θs(t) into (8) and eliminating θs(t), we can show thatthe entire system (8) – (10) is a primal-dual algorithm ofFR′ (see [21, Theorem 5]). Therefore, Theorem 10 in [21]guarantees global asymptotic convergence to an equilibriumpoint which by Proposition 1 is an optimal solution of bothFR′ and FR. Our setup is simpler than the controllersin [21], which had additional states, but the same prooftechnique applies. Although Proposition 2 requires costs toblow up as regulation generations approach minimum andmaximum capacities, this assumption is not restrictive, as itcan be achieved by adding a barrier function to the actualcost before implementing in the controllers. Moreover, as ourmechanism is distributed, it can be implemented on largescale systems with minimal computational requirements andguaranteed convergence. However, further studies have to beperformed on the convergence properties of the algorithm asthe system size increases, and how the speed of convergence isaffected by the cost functions of the generators and the designof the control gains.
V. MARKET MECHANISM FOR ECONOMIC DISPATCH
This section illustrates how to implement the solution toED through a market mechanism for economic dispatch. Themechanism works in the following manner. In the first timeperiod, the ISO collects supply function bids from generators(both dispatch and regulation) and uses those bids to solveED. Then, in subsequent time periods, the ISO uses theregulation generators’ supply function bids to implement thecontroller in (9). This mechanism is efficient if SY STEM canbe decomposed into ED-FR and does not require any morecommunication than the existing market mechanisms used inpractice.
A. Market model
We assume that generators are price-takers. Let πdn denote
the price paid to dispatch generator n in each period and πrs,n
denote the price paid to regulation generator n in outcomes. Then, the expected profit of the dispatch and regulationgenerators at node n are: Note that the regulation generator’sprofit is a function of its total production qrn + rrs,n ineach outcome s ∈ S. The supply function bids indicate the
quantities the generators are willing to produce at every price.2
We assume that these bids are chosen from a parameterizedfamily of functions. In particular, for node n, we representthe dispatch and regulation generators’ supply functions byparameters αd
n > 0 and αrn > 0 respectively, and these
bids indicate that the dispatch generator is willing to supplythe quantity qdn = [αd
nsdn(π
dn)]
qdn
¯qdn
in the first time periodand the regulation generator is willing to supply the quantityqrn + rrs,n = [αr
nsrn(π
rs,n)]
qrn
¯qrn
in outcome s, for some fixedfunctions sdn : [
¯qdn, q
dn] → R+ and srn : [
¯qrn, q
rn] → R+.3
We also assume that sdn(πdn) 6= 0 for all πd
n ∈ R andsrn(π
rs,n) 6= 0 for all πr
s,n ∈ R.4 The generators choosetheir bids to maximize their profits subject to their capacityconstraints. Note that the regulation generator submits onlyone supply function for all possible outcomes. Hence, its bidin the economic dispatch timescale is also used as its bid inthe frequency regulation timescale.
The system operator interprets bids αdn and αr
n as signalsthat the dispatch and regulation generators at node n havemarginal costs πd
n and πrs,n respectively when supplying
quantities αdns
dn(π
dn) and αr
nsrn(π
rs,n) respectively. Hence, it
associates with the generators the following bid cost functions:
cdn(qdn) :=
∫ qdn
¯qdn
(sdn)−1(w/αd
n) dw, (12)
crn(qrn) :=
∫ qrn
¯qrn
(srn)−1(w/αr
n) dw. (13)
Let αd := (αdn, n ∈ N) and αr := (αr
n, n ∈ N) denotethe vectors of bids. Given bids (αd,αr), the system operatorsolves ED to minimize expected bid costs. The prices forthe regulation generator in the first time period are the nodalprices in ED while the prices for the dispatch generator arethe nodal prices offset by δ. Then, in each subsequent outcomes ∈ S, the system operator implements the controller in (9)using regulation generators’ bid costs. The prices are the nodalprices in FR (which are computed by DFR).
B. Market equilibrium
Our focus is on understanding the efficiency of the mech-anism. Formally, we consider the following notion of a com-petitive equilibrium.
2In practice, supply function bids are, in fact, functions from quantity tominimum acceptable price. This is not captured by our model because it wouldinvolved multi-valued maps instead of functions. Nevertheless, in line withprevious work [7], [39]–[42], we will use supply functions that map price toquantities in this paper.
3Numerous studies have explored different functional forms of the supplyfunctions and their impact on market efficiency, e.g., see [7], [39]–[42]. Thefocus of this work is on illustrating that ED can be implemented using a sim-ple market mechanism. Hence, we restrict ourselves to linearly parameterizedsupply functions and leave the analyses of other more sophisticated supplyfunctions to future work. We refer the reader to [41] for some appealingproperties of linearly parameterized supply functions.
4This assumption is a technical condition to avoid the degenerate situationwhere a generator’s supply quantity is not sensitive to its bid parameter whichwould occur if sdn(π
dn) = 0 or srn(π
rs,n) = 0.

7
Definition 2. We say that bids (αd,αr) are a competitiveequilibrium if there exists prices πd ∈ RN and πr = (πr
s, s ∈S) ∈ RNS such that:(a) For all n, αd
n is an optimal solution to:
maxαd
n>0PFd
n
([αd
nsdn(π
dn)]
qdn
¯qdn, πd
n
).
(b) For all n, αrn is an optimal solution to:
maxαr
n>0PFr
n
(([αr
nsrn(π
rs,n)]
qrn
¯qrn, πr
s,n), s ∈ S).
(c) πd = (1/K)(π(λ1,
¯µ1, µ1) + δ
)and πr
1 =(1/K)π(λ1,
¯µ1, µ1) where λ1 and (
¯µ1, µ1) are
the Lagrange multipliers associated with constraints (3)and (5) respectively in:
ˆED(d1) : minqd,qr
∑n∈N
(Kcdn(q
dn) +Kcrn(q
rn)− δnq
dn
)s.t. (qd,qr,0) ∈ Ω(d1).
(d) For all s ∈ S, πrs = π(λs,
¯µs, µs) where λs and
(¯µs, µs) are the Lagrange multipliers associated with
constraints (3) and (5) respectively in:
ˆFR(qd,qr,ds) : minrrs
∑n∈N
crn(qrn + rrs,n)
s.t. (qd,qr, rrs) ∈ Ω(ds),
where qd =([αd
nsdn(π
dn)]
qdn
¯qdn, n ∈ N
)and qr =(
[αrns
rn(π
r1,n)]
qrn
¯qrn, n ∈ N
).
At each node n ∈ N , the dispatch and regulation genera-tors produce at setpoints [αd
nsdn(π
dn)]
qdn
¯qdn
and [αrns
rn(π
r1,n)]
qrn
¯qrn
respectively in period 1, and the regulation generator producesan additional quantity [αr
nsrn(π
rs,n)]
qrn
¯qrn
− [αrns
rn(π
r1,n)]
qrn
¯qrn
inoutcome s ∈ S.
The following is our main result for this section. It high-lights that, as a consequence of Theorem 1, any competitiveequilibrium is efficient.
Proposition 3 (Efficiency). Suppose that, for each n ∈ N ,the functions sdn(·) = cd′−1
n (·)/γdn and srn(·) = cr′−1
n (·)/γpn
for some constants γdn, γ
rn > 0. Let λs and (
¯µs, µs) be the
Lagrange multipliers associated with constraints (3) and (5)respectively in SY STEM . Suppose that (7) holds. Then:(a) Any competitive equilibrium has a production schedule
that solves SY STEM .(b) Any production schedule that solves SY STEM can be
sustained by a competitive equilibrium.
Proposition 3 resembles classical welfare theorems,e.g., [41], [43]–[45]. However, it differs from typical compet-itive equilibria frameworks because each regulation generatoris restricted to bidding a single supply function over the entireeconomic dispatch interval even though there are multiple fasttimescale instances. The latter creates challenges in guaran-teeing existence and efficiency of equilibria that do not arisein typical competitive equilibria frameworks. In particular, thespace of bid functions needs to be sufficiently expressive forgenerators to convey their costs over multiple fast timescale
instances via a single bid function. Proposition 3 circumventedthis challenge by restricting supply functions to be in the linearspace of regulation generators’ true cost functions. An impor-tant extension is to understand the existence and efficiency ofequilibria under less restrictive bid spaces. Proposition 3 alsohighlights that nodal pricing is not always efficient and that thepricing mechanism needs to be jointly designed and analyzedwith decomposition principles in order to achieve efficiency.
VI. CASE STUDY
In this section, we compare the proposed mechanism tothe current practice using a case study on the IEEE 24-busreliability test system [46]. For each demand node, we usethe values from the data as the demand at time t = 0, and wegenerate 100 samples of a zero-mean random process to obtainthe demands over the 5-minute interval. Fig. 3 shows how thetotal system demand evolves for the 100 samples. Therefore,system demand increases/decreases by up to 20 MW overthe 5-minute interval which is consistent with practice. Weconstruct the scenario tree for the economic dispatch problemin the following manner. We assume that the 5-minute intervalis partitioned into K = 20 time periods; therefore, each timeperiod lasts 15 seconds. We subsample the demand trajectoriesat 15-second intervals and assign equal probabilities to allsubsampled trajectories. Therefore, the scenario tree is a talltree, where the root node has 100 children, and all other nodeseither have one child or is a leaf node.
Table I summarizes the properties of the generators on thesystem. We assume that hydro and combustion turbine (CT)generators are regulation resources while all other generatorsare dispatch resources.5 There are 6 hydro units that eachgenerate between 10 to 50 MW and 4 CT units that eachgenerate between 16 to 20 MW. To satisfy the convergenceconditions in Proposition 2, we assume that the distributedcontrollers for the hydro and CT resources are operated withcost functions as shown in Fig. 2. These are obtained by addingbarrier functions to the original linear cost functions in thetest system data. We assume a damping of 2.0 p.u. for allgenerators.
Recall that the demand evolution has zero mean. Therefore,in the current practice, the economic dispatch mechanism will
5Notice that certain nodes have only one type of generator or no generator.It is straightforward to extend Theorem 1 and Proposition 3 to such a setting.However, to extend Propositions 1 and 2 to such a setting requires thefollowing modification to the DFR algorithm:
πrs(t) = ζπ
(qd + qr + rrs(t)− ds −Lφs(t)
); (14a)
˙µs(t) = ζµ[BC>φs(t)− f
]+µs
; (14b)
¯µs(t) = ζ¯
µ[− f −BC>φs(t)]+¯µs
; (14c)
φs(t) = χφ(Lπp
s(t)−CB(µs(t)−
¯µs(t) +BC>φs(t)− ρs(t)
)),
(14d)
ρs(t) = χρ(BC>φs(t)− ρs(t)
), (14e)
where ρs,e is a new state variable associated with each line. The newalgorithm (14) is equivalent to modifying FR′ by adding 1
2||ρ−BC>φ||2
in the objective and adding ρs as a new optimization variable. While thischange does not modify the optimal solution, it provides additional convexitythat ensures convergence of the primal-dual algorithm when generators arenot present at every bus.

8
TABLE I: Generators on test system.
Unit Group Unit Type Number Production Marginal Cost AssignmentRange (MW) Range ($/MWh)
U12 Oil/Steam 5 [2.4, 12] [58.14, 64.446] DispatchU20 Oil/CT 4 [16, 20] See Fig. 2 RegulationU50 Hydro 6 [10, 50] See Fig. 2 RegulationU76 Coal/Steam 4 [15.2, 76] [16.511, 18.231] Dispatch
U100 Oil/Steam 3 [25, 100] [46.295, 54.196] DispatchU155 Coal/Steam 4 [54.3, 155] [13.294, 14.974] DispatchU197 Oil/Steam 3 [69, 197] [49.57, 51.405] DispatchU350 Coal/Steam 1 [140, 350] [13.22, 15.276] DispatchU400 Nuclear 2 [100, 400] [4.466, 4.594] Dispatch
(a) Hydro cost (b) Hydro control (c) CT cost (d) CT control
Fig. 2: Regulation cost and control functions.
be cleared based on the demand at time t = 0. Our simulationswill reveal that the current practice is suboptimal. To simulatethe current practice, we run ED(d1) with δn = 0, and assumeall regulation resources run the standard automatic generationcontrol (AGC) [3]:
ACEs(t) =1
N1>ωs(t), (15a)
qimbs (t) = −ACE(t), (15b)
rrs(t) =qimbs (t)
1>qr· qr. (15c)
Therefore, we assume that the entire network is one areaand there is zero net inter-area flow. In practice, AGC signalsare sent to the generators every few seconds. However, in oursimulations, we assume that these signals are sent continuouslyas it is not our focus to study the impact of control delays.We assume that each regulation resource reserves 10% of itscapacity for regulation service. Therefore, the hydro dispatchranges from 12.5 to 47.5 MW and the CT dispatch ranges from17 to 19 MW. This provides a total regulation capacity of 19MW in both directions (up and down). Since the maximumchange in demand over the 5-minute interval is about 20 MW,in the worst case scenario, all regulation capacity will be used.
To focus the simulation on the gains due to efficient useof regulation resources, we assume that at time t = 0, thegenerators are operating at the solution of the economic dis-patch problem (this is implemented by starting the simulationat a large negative time t′ < 0, but using the demand attime t = 0, where t′ is sufficiently negative such that thedynamics have converged by time t = 0. Fig. 4 and 5 show,for one demand trajectory, the evolution of the frequency at
the bus where the hydro resources are located, using the AGCand DFR mechanisms proposed in Section IV, respectively.Observe that both mechanisms are able to rebalance powerand maintain the nominal frequency. In fact, for this example,AGC regulates frequency more successfully than DFR.
Fig. 6 shows the evolution of the prices in DFR. UnlikeAGC, which compensates frequency regulation based on theLMP in the most recent economic dispatch run, the pricesin DFR adjusts dynamically to reflect real-time and localconditions in the power system. Fig. 7 and 8 show an exampleof hydro and CT production. These figures illustrate theinefficiency of AGC – it is constrained to the usage of staticparticipation factors that do not take into account generators’capacity constraints and line congestion. Therefore, AGC isunable to utilize the regulation reserves efficiently. Althoughhydro is significantly cheaper than CT, the system underAGC is unable to substitute hydro for CT due to the staticparticipation factors. On the other hand, under DFR, thesystem substitutes hydro for CT dynamically to reduce costs.
Next, we illustrate the potential monetary savings that canbe obtained under DFR compared to AGC. Fig. 9 shows ahistogram of the percentage reduction in the costs of hydroand CT generation under DFR; Fig. 10 shows a histogram ofthe percentage reduction in the costs of non-hydro and non-CT generation under DFR; and Fig. 11 shows a histogram ofthe percentage reduction in total generation costs under DFR.Observe that DFR reduces hydro and CT costs by an averageof 2.5% due to more efficient usage of regulation resources inreal-time. Moreover, DFR also reduces dispatch costs of non-hydro and non-CT resources by 0.7% due to more efficientdispatch of those resources and avoiding the need to reserve

9
Fig. 3: Demand Processes Fig. 4: Frequency evolution: AGC Fig. 5: Frequency evolution: DFR
Fig. 6: Price evolution: DFR Fig. 7: An example of hydro production Fig. 8: An example of CT production
Fig. 9: Histogram of reduction in costsof hydro and CT generation under DFR
Fig. 10: Histogram of reduction in costsof non-hydro and non-CT generationunder DFR
Fig. 11: Histogram of reduction in totalcosts under DFR
capacity for regulation. Since hydro and CT costs comprise onaverage 17.5% of total costs, the net savings on all generationcosts is an average of 1%. There are also further savings incapacity costs that may be estimated at about 0.35% (basedon the fact that CAISO’s ancillary costs in 2015 is 0.7% ofenergy costs and about half of ancillary costs is attributable toregulation service [47]). Further studies should be performedon other systems with different mix of generation resources. Inaddition, recall that DFR has the added benefit of convergingto operating points that respect line limits, while AGC does
not guarantee this.
VII. CONCLUSION
This paper proposes an optimization decomposition ap-proach for co-optimizing economic dispatch and frequencyregulation resources. It demonstrates that optimization decom-position provides a rigorous way to design power systemoperations to allocate resources efficiently across timescales.Our main result, in Theorem 1, shows one way to choose gen-eration setpoints optimally at the economic dispatch timescale,

10
and provides a guide on how to design a principled architecturefor power system operations. In particular, using this result, wedesign an optimal frequency control scheme and an optimaleconomic dispatch mechanism, both of which differ fromexisting approaches in crucial ways and reveal potential inef-ficiencies in the latter. Hence, this paper underscores the needto jointly analyze economic dispatch and frequency regulationmechanisms when investigating the efficiency of the overallsystem.
REFERENCES
[1] D. Cai, E. Mallada, and A. Wierman, “Distributed optimization decom-position for joint economic dispatch and frequency regulation,” in 201554th IEEE Conference on Decision and Control, Dec. 2015, pp. 15–22.
[2] A. J. Wood and B. F. Wollenberg, Power Generation, Operation, andControl, 2nd ed. John Wiley & Sons, Inc., 1996.
[3] A. R. Bergen and V. Vittal, Power Systems Analysis, 2nd ed. PrenticeHall, 2000.
[4] J. Machowski, J. Bialek, and J. Bumby, Power system dynamics: Stabilityand Control, 2nd ed. John Wiley & Sons, Inc., 2008.
[5] J. Carpentier, “Optimal power flows,” International Journal of ElectricalPower & Energy Systems, vol. 1, no. 1, pp. 3–15, 1979.
[6] D. Kirschen and G. Strbac, Fundamentals of Power System Economics.Wiley Online Library, 2004.
[7] R. Baldick, R. Grant, and E. Kahn, “Theory and application of linearsupply function equilibrium in electricity markets,” Journal of Regula-tory Economics, vol. 25, no. 2, pp. 143–167, 2004.
[8] C. Inc., “Market Optimization Details,” http://caiso.com/Documents/TechnicalBulletin-MarketOptimizationDetails.pdf, November 2009,[Online; accessed Mar-24-2015].
[9] F. C. Schweppe, R. D. Tabors, M. Caraminis, and R. E. Bohn, “Spotpricing of electricity,” 1988.
[10] I. Ibraheem, P. Kumar, and D. Kothari, “Recent philosophies of auto-matic generation control strategies in power systems,” Power Systems,IEEE Transactions on, vol. 20, no. 1, pp. 346–357, Feb 2005.
[11] F. deMello, R. Mills, and W. B’Rells, “Automatic Generation ControlPart II-Digital Control Techniques,” Power Apparatus and Systems, IEEETransactions on, vol. PAS-92, no. 2, pp. 716–724, 1973.
[12] M. D. Ilic, “From hierarchical to open access electric power systems,”Proceedings of the IEEE, vol. 95, no. 5, pp. 1060–1084, 2007.
[13] J. Zaborszky, “A large system approach toward operating the electricpower system by decision and control,” in American Control Conference,1984. IEEE, 1984, pp. 1143–1155.
[14] D. B. Eidson and M. D. Ilic, “Advanced generation control witheconomic dispatch,” in Decision and Control, 1995., Proceedings of the34th IEEE Conference on, vol. 4. IEEE, 1995, pp. 3450–3458.
[15] M. Ilic and C.-N. Yu, “Minimal system regulation and its value in achanging industry,” in Control Applications, 1996., Proceedings of the1996 IEEE International Conference on. IEEE, 1996, pp. 442–449.
[16] H. Mukai, J. Singh, J. H. Spare, and J. Zaborszky, “A reevaluation ofthe normal operating state control of the power system using computercontrol and system theory part ii: Dispatch targeting,” IEEE Transactionson Power Apparatus and Systems, no. 1, pp. 309–317, 1981.
[17] A. A. Thatte, F. Zhang, and L. Xie, “Frequency aware economicdispatch,” in North American Power Symposium (NAPS), 2011, Aug.2011, pp. 1–7.
[18] N. Li, L. Chen, and C. Zhao, “Connecting automatic generation controland economic dispatch from an optimization view,” Control of NetworkSystems, IEEE Transactions on, to appear.
[19] F. Dorfler, J. Simpson-Porco, and F. Bullo, “Breaking the hierarchy:Distributed control & economic optimality in microgrids,” 2014.
[20] C. Zhao, E. Mallada, S. Low, and J. Bialek, “A unified frameworkfor frequency control and congestion management,” in Power SystemsComputation Conference, 2016, to appear.
[21] E. Mallada, C. Zhao, and S. H. Low, “Optimal load-side control forfrequency regulation in smart grids,” ArXiv e-prints, Oct. 2014.
[22] P. Carpentier, G. Gohen, J.-C. Culioli, and A. Renaud, “Stochasticoptimization of unit commitment: a new decomposition framework,”IEEE Trans. on Power Systems, vol. 11, no. 2, pp. 1067–1073, 1996.
[23] S. Takriti, J. Birge, and E. Long, “A stochastic model for the unitcommitment problem,” IEEE Transactions on Power Systems, vol. 11,no. 3, pp. 1497–1508, 1996.
[24] U. Ozturk, M. Mazumdar, and B. Norman, “A solution to the stochasticunit commitment problem using chance constrained programming,”IEEE Trans. on Power Systems, vol. 19, no. 3, pp. 1589–1598, 2004.
[25] E. Ela and M. O’Malley, “Studying the variability and uncertainty im-pacts of variable generation at multiple timescales,” IEEE Transactionson Power Systems, vol. 27, no. 3, pp. 1324–1333, Aug. 2012.
[26] D. Bienstock, M. Chertkov, and S. Harnett, “Chance-constrained optimalpower flow: Risk-aware network control under uncertainty,” SIAMReview, vol. 56, no. 3, pp. 461–495, 2014.
[27] M. Vrakopoulou, K. Margellos, J. Lygeros, and G. Andersson, “Aprobabilistic framework for reserve scheduling and security assessmentof systems with high wind power penetration,” IEEE Transactions onPower Systems, vol. 28, no. 4, pp. 3885–3896, Nov. 2013.
[28] M. Minoux, “On 2-stage robust lp with rhs uncertainty: complexityresults and applications,” Journal of Global Optimization, vol. 49, no. 3,pp. 521–537, 2011.
[29] M. Chiang, S. H. Low, A. R. Calderbank, and J. C. Doyle, “Layeringas optimization decomposition: A mathematical theory of networkarchitectures,” Proc. of the IEEE, vol. 95, no. 1, pp. 255–312, 2007.
[30] D. P. Palomar and M. Chiang, “A tutorial on decomposition methodsfor network utility maximization,” Selected Areas in Communications,IEEE Journal on, vol. 24, no. 8, pp. 1439–1451, 2006.
[31] D. W. Cai, C. W. Tan, and S. H. Low, “Optimal max-min fairnessrate control in wireless networks: Perron-frobenius characterization andalgorithms,” in INFOCOM, 2012 Proc. IEEE, 2012, pp. 648–656.
[32] A. R. Bergen and D. J. Hill, “A structure preserving model for powersystem stability analysis,” IEEE Trans. Power App. Syst., no. 1, pp.25–35, 1981.
[33] F. deMello, R. Mills, and W. B’Rells, “Automatic Generation ControlPart I-Process Modeling,” Power Apparatus and Systems, IEEE Trans-actions on, vol. PAS-92, no. 2, pp. 710–715, 1973.
[34] C. Zhao, U. Topcu, N. Li, and S. Low, “Design and Stability of Load-Side Primary Frequency Control in Power Systems,” Automatic Control,IEEE Transactions on, vol. 59, no. 5, pp. 1177–1189, 2014.
[35] C. Zhao, E. Mallada, and F. Dorfler, “Distributed frequency controlfor stability and economic dispatch in power networks,” in AmericanControl Conference (ACC), 2015, July 2015, pp. 2359–2364.
[36] S. You and L. Chen, “Reverse and forward engineering of frequencycontrol in power networks,” in 53th IEEE Conference on Decision andControl, Dec 2014.
[37] A. Jokic, M. Lazar, and P. van den Bosch, “On constrained steady-state regulation: Dynamic kkt controllers,” Automatic Control, IEEETransactions on, vol. 54, no. 9, pp. 2250–2254, Sept 2009.
[38] A. Cherukuri, E. Mallada, and J. Cortes, “Asymptotic convergence ofconstrained primal–dual dynamics,” Systems & Control Letters, vol. 87,pp. 10–15, 2016.
[39] A. Rudkevich, “On the supply function equilibrium and its applicationsin electricity markets,” Decision Support Systems, vol. 40, no. 3, pp.409–425, 2005.
[40] R. Baldick, “Electricity market equilibrium models: The effect ofparametrization,” IEEE Transactions on Power Systems, vol. 17, no. 4,pp. 1170–1176, 2002.
[41] R. Johari and J. N. Tsitsiklis, “Parameterized supply function bidding:Equilibrium and efficiency,” Operations research, vol. 59, no. 5, pp.1079–1089, 2011.
[42] P. D. Klemperer and M. A. Meyer, “Supply function equilibria inoligopoly under uncertainty,” Econometrica: Journal of the EconometricSociety, pp. 1243–1277, 1989.
[43] A. Mas-Colell, M. D. Whinston, J. R. Green, et al., Microeconomictheory. Oxford university press New York, 1995, vol. 1.
[44] R. Johari and J. N. Tsitsiklis, “Efficiency of scalar-parameterized mech-anisms,” Operations Research, vol. 57, no. 4, pp. 823–839, 2009.
[45] G. Wang, M. Negrete-Pincetic, A. Kowli, E. Shafieepoorfard, S. Meyn,and U. V. Shanbhag, “Dynamic competitive equilibria in electricitymarkets,” in Control and optimization methods for electric smart grids.Springer, 2012, pp. 35–62.
[46] P. Wong, P. Albrecht, R. Allan, R. Billinton, Q. Chen, C. Fong,S. Haddad, W. Li, R. Mukerji, D. Patton, et al., “The ieee reliabilitytest system-1996. a report prepared by the reliability test system taskforce of the application of probability methods subcommittee,” PowerSystems, IEEE Transactions on, vol. 14, no. 3, pp. 1010–1020, 1999.
[47] C. Inc., http://www.caiso.com/Documents/2015AnnualReportonMarketIssuesandPerformance.pdf.

11
NOMENCLATURE
A. Sets and Indices
S Set of outcomes (s ∈ S).N Set of nodes in the network (n ∈ N ).L Set of links in the network (l ∈ L).K Number of discrete time periods in one economic
dispatch inteval (k = 1, . . . ,K).
B. Parameters
κ(s) Period associated with outcome s.ps Probability of outcome s given that period is κ(s).
ds,n Real power demand at node n in outcome s.
cdn Cost function of dispatch generator n.crn Cost function of regulation generator n.Bl Sensitivity of flow on line l with respect to
phase difference between its buses.C Incidence matrix of network.H Matrix of shift factors.fl Capacity of line l.
¯qdn, q
dn Minimum and maximum generation limits
of dispatch generator n.
¯qrn, q
rn Minimum and maximum generation limits
of regulation generator n.Mn Aggregate inertia of generators at node n.Dn Aggregate damping of generators at node n.
ζπn , ζµl , ζ¯
µ
l , χφn Control gains in distributed frequency
regulation algorithm.
sdn Basis supply function of dispatch generator n.Specifies quantity as a function of price.
srn Basis supply function of regulation generator n.Specifies quantity as a function of price.
C. Variables
qdn Setpoint of dispatch generator n.qrn Setpoint of regulation generator n.
rrn,s Recourse of regulation generator n in outcome s.
θs,i Phase at bus i in outcome s.λs Lagrange multiplier associated with demand-
supply constraint in outcome s.
¯µs,l, µs,l Lagrange multipliers associated with line-
flow constraint in outcome s.ωs,n Frequency deviations from nominal.πs,n Locational marginal price at node n in outcome s.
αdn Bid of dispatch generator n. Indicates generator
is willing to supply[αdns
dn(π
dn)]qdn¯qdn
at price πdn.
αrn Bid of dispatch generator n. Indicates generator
is willing to supply [αrns
rn(π
rn)]
qrn
¯qrn
at price πrn.
APPENDIX
Proof of Theorem 1. The result follows from analyzing theKarush-Kuhn-Tucker (KKT) conditions of SY STEM , ED,and FR. However, we first reformulate the problems as thenotations are simpler with the reformulations. Define qr
s :=qr + rrs. Note that, due to the constraint that rr1 = 0, thereis a bijection between the set of feasible (qd,qr, rr) and theset of feasible (qd,qr
1, . . . ,qrS). Hence, SY STEM can be
reformulated as:
minqd,qr
1,...,qrS
∑s∈S
ps∑n∈N
(cdn(q
dn) + crn(q
rs,n)
)s.t. (qd,qr
1,qrs − qr
1) ∈ Ω(ds), ∀s ∈ S.(16)
Also, ED(d1) can be reformulated as:
minqd,qr
1
∑n∈N
(Kcdn(q
dn) +Kcrn(q
r1,n)− δnq
dn
)s.t. (qd,qr
1,0) ∈ Ω(d1).(17)
And, FR(qd,qr,ds) can be reformulated as:
minqrs
∑n∈N
crn(qrs,n)
s.t. (qd,qr1,q
rs − qr
1) ∈ Ω(ds).(18)
Hence, SY STEM can be optimally decomposed intoED-FR if (qd,qr
1, . . . ,qrS) is an optimal solution to (16)
if and only if (qd,qr1) is an optimal solution to (17) and qr
s
is an optimal solution to (18) for all s ∈ S.Next, we prove (a). It is easy to see that (16) has compact
sub-level sets. Moreover, its objective function is strictlyconvex. Hence, (16) has a unique optimal solution. By sim-ilar arguments, we conclude that (17) has a unique optimalsolution, and that (18) has a unique optimal solution ifthe set
qrs ∈ RN : (qd,qr
1,qrs − qr
1) ∈ Ω(ds)
is non-empty.Hence, to prove (a), it suffices to show the forward implication,that is, if (7) holds, then (qd,qr
1, . . . ,qrS) is an optimal
solution to (16) implies that (qd,qr1) is an optimal solution

12
to (17) and qrs is an optimal solution to (18) for all s ∈ S. The
reverse implication follows from the existence and uniquenessof the optimal solutions.
Let the Lagrangian of (16) be denoted by:
L(qd,qr1, . . . ,q
rS ,
¯ξ, ξ,
¯ν, ν,
¯µ, µ,λ)
:=∑s∈S
ps∑n∈N
(cdn(q
dn) + crn(q
rs,n)
)+ Ld(qd,
¯ξ, ξ)
+∑s∈S
psLr(qr
s, ¯νs, νs) +
∑s∈S
psLf (qd,qr
s,¯µs, µs)
−∑s∈S
psλs1> (
qd + qrs − ds
),
where:
Ld(qd,¯ξ, ξ) :=
¯ξ>
(¯qd − qd
)+ ξ>
(qd − qd
)Lr(qr
s, ¯νs, νs) :=
¯ν>s
(¯qr − qr
s
)+ ν>
s (qrs − qr)
Lf (qd,qrs,¯µs, µs) :=
¯µ>
s
(−f −H
(qd + qr
s − ds
))+ µ>
s
(H
(qd + qr
s − ds
)− f
).
Note that we scaled the constraints by their probabilities, and
¯ξ ∈ RN
+ , ξ ∈ RN+ ,
¯ν = (
¯νs, s ∈ S) ∈ RNS
+ , ν = (νs, s ∈S) ∈ RNS
+ ,¯µ = (
¯µs, s ∈ S) ∈ RLS
+ , µ = (µs, s ∈ S) ∈ RLS+ ,
λ = (λs, s ∈ S) ∈ RS are appropriate Lagrange multipliers.Since (16) has a convex objective and linear constraints,
from the KKT conditions, we infer that (qd,qr1, . . . ,q
rS) is an
optimal solution to (16) if and only if (qd,qr1,q
rs − qr
1) ∈Ω(ds) for all s ∈ S and there exists
¯ξ, ξ ∈ RN
+ ,¯ν, ν ∈
RNS+ ,
¯µ, µ ∈ RLS
+ ,λ ∈ RS such that:(Kcd′n (q
dn), n ∈ N
)+ ξ −
¯ξ −
∑s∈S
psπ(λs,¯µs, µs) = 0; (19a)
Ld(qd,¯ξ, ξ) = 0; (19b)(
cr′n (qrs,n), n ∈ N
)+ νs −
¯νs − π(λs,
¯µs, µs) = 0; (19c)
Lr(qrs, ¯νs, νs) = 0; (19d)
Lf (qd,qrs,¯µs, µs) = 0, (19e)
for all s ∈ S.Similarly, (qd,qr
1) is an optimal solution to (17) if and onlyif (qd,qr
1,0) ∈ Ω(d1) and there exists¯ξ, ξ ∈ RN
+ ,¯ν1, ν1 ∈
RN+ ,
¯µ1, µ1 ∈ RL
+, λ1 ∈ R such that:(Kcd′n (q
dn), n ∈ N
)+ ξ −
¯ξ − π(λ1,
¯µ1, µ1)− δ = 0; (20a)
Ld(qd,¯ξ, ξ) = 0; (20b)(
Kcr′n (qr1,n), n ∈ N
)+ ν1 −
¯ν1 − π(λ1,
¯µ1, µ1) = 0; (20c)
Lr(qr1, ¯ν1, ν1) = 0; (20d)
Lf (qd,qr1,¯µ1, µ1) = 0. (20e)
And qrs is an optimal solution to (18) if and only if
(qd,qr1,q
rs − qr
1) ∈ Ω(ds) and there exists¯νs, νs ∈
RN+ ,
¯µs, µs ∈ RL
+, λs ∈ R such that:(cr′n (q
rs,n), n ∈ N
)+ νs −
¯νs − π(λs,
¯µs, µs) = 0; (21a)
Lp(qrs, ¯νs, νs) = 0; (21b)
Lf (qd,qrs,¯µs, µs) = 0. (21c)
Suppose (qd,qr1, . . . ,q
rS) is an optimal solution to (16)
with associated Lagrange multipliers (¯ξ, ξ,
¯ν, ν,
¯µ, µ,λ).
Note that (qd,qr1,0) ∈ Ω(d1). From the fact that the
variables (qd,¯ξ, ξ,
¯µ, µ, λ) satisfy (19a) and (7) and the
fact that∑
s∈S ps = K, we infer that the variables(qd,
¯ξ, ξ,K
¯µ1,Kµ1,Kλ1) satisfy (20a). From the fact that
(qd,qrs, ξ,
¯ξ, νs,
¯νs, µs,
¯µs, λs) satisfy (19b) – (19e), we infer
that the variables (qd,qr1, ξ,
¯ξ,Kν1,K
¯ν1,Kµ1,K
¯µ1,Kλ1)
satisfy (20b) – (20e). Hence, (qd,qr1) is an optimal solution
to (17). Note also that (qd,qr1,q
rs−qr
1) ∈ Ω(ds) for all s ∈ S.From the fact that the variables (qd,qr
s, ¯νs, νs,
¯µs, µs, λs)
satisfy (19c) – (19e), we infer that those variables satisfy (21).Hence, qr
s is an optimal solution to (18) for all s ∈ S.Next, we prove (b). Let (qd,qr
1, . . . ,qrS) be a solution
to (16) such that (qd,qr1) is a solution to (17). If
¯qdn < qdn < qdn
and¯qrn < qr1,n < qrn, then the complementary slackness
conditions imply that¯ξn = ξn = 0 and
¯ν1,n = ν1,n = 0.
From the KKT conditions of (16), which are given by (19),we infer that:
Kcd′n (qdn)−
∑s∈S
psπn(λs,¯µs, µs) = 0; (22)
cr′n (qr1,n)− πn(λ1,
¯µ1, µ1) = 0, (23)
where (¯µs, µs,λ) are the associated Lagrange multipliers.
From the KKT conditions of (17), which are given by (20),we infer that:
Kcd′n (qdn)− πn(λ
′1,¯µ′
1, µ′1)− δn = 0; (24)
Kcr′n (qr1,n)− πn(λ
′1,¯µ′
1, µ′1) = 0, (25)
where (¯µ′
s, µ′s,λ
′) are the associated Lagrange multipliers. Itfollows that:
δn =∑s∈S
psπn(λs,¯µs, µs)− πn(λ
′1,¯µ′
1, µ′1)
=∑s∈S
psπn(λs,¯µs, µs)−Kπn(λ1,
¯µ1, µ1)
=∑s∈S
ps(πn(λs,
¯µs, µs)− πn(λ1,
¯µ1, µ1)
).
The first equality follows from comparing (22) and (24). Thesecond equality follows from comparing (23) and (25). Thelast equality follows from the fact that
∑s∈S ps = K.
Proof of Proposition 1. We provide a proof sketch of this re-sult. The skipped details can be found in [21]. (i) follows fromthe KKT conditions of FR′(qd,qr,ds) and is shown in [21,Lemma 2]. Since ω′
s = 0, it follows from constraints (11a)and (11b) of FR′(qd,qr,ds) that Lθ′
s = Lφ′s, which, since
the null space of L is span1, implies that θ′s = φ′
s+α1 forsome α ∈ R. This implies that BC>φ′
s = BC>θ′s. Therefore,
without loss of generality, we can substitute constraint (11a)in FR′(qd,qr,ds) by the constraint ωs = 0. Then, us-ing the definition of H and the equivalence between (3)and (4), we infer that the feasible sets of FR(qd,qr,ds)and FR′(qd,qr,ds) are equivalent. Finally, since crn(·) isstrictly convex, by uniqueness of the optimal solutions, weget (ii). Lastly, (iii) follows from the definition of H andBC>φ′
s = BC>θ′s. The final statement of the proposition
follows directly from [21, Theorem 8].

13
Proof of Proposition 3. Our proof proceeds in 6 steps: (1)Characterizing regulation generators’ optimal bids αr giventheir prices πr; (2) Characterizing dispatch generators’ opti-mal bids αd given their prices πd; (3) Characterizing prices(πd,πr) given bids (αd,αr) using KKT conditions; (4)Showing that, at an equilibrium, the production schedule isthe unique optimal solution to ˆED- ˆFR; (5) Showing that anyproduction schedule (qd,qr, rr) that solves SY STEM canbe obtained using bids (γd,γr) and the latter satisfy the equi-librium characterizations in steps 1 to 3; and (6) Showing thatany bids (αd,αr) that satisfy the equilibrium characterizationsin steps 1 to 3 give the same production schedule as that underbids (γd,γr) (which also solves SY STEM ). Note that part(a) follows from step 6 and part (b) follows from step 5.
Step 1: Characterizing regulation generators’ optimal bidsαr given their prices πr. Since crn is strictly convex andcrn(q
rs,n) → +∞ as qrs,n →
¯qrn, q
rn, cr′n is invertible. Let
σ :S→S be any permutation function that satisfies:
cr′−1n (πr
σ(1),n) ≤ cr′−1n (πr
σ(2),n) ≤ . . . ≤ cr′−1n (πr
σ(S),n),
and let integers i, j ∈ 0, 1, . . . , S be such that:
cr′−1n (πr
σ(s),n) ≤¯qrn ∀s = 1, . . . , i; (26a)
¯qrn < cr′−1
n (πrσ(s),n) < qrn ∀s = i+ 1, . . . , j; (26b)
qrn ≤ cr′−1n (πr
σ(s),n) ∀s = j + 1, . . . , S. (26c)
We now show that αrn ∈ R++ maximizes PFr
n if and only if:
αrns
rn(π
rσ(s),n) ≤
¯qrn ∀s = 1, . . . , i; (27a)
αrns
rn(π
rσ(s),n) = cr′−1
n (πrσ(k),n) ∀s = i+ 1, . . . , j; (27b)
αrns
rn(π
rσ(s),n) ≥ qrn ∀s = j + 1, . . . , S. (27c)
For notational brevity, in the rest of this step, we abusenotation and let:
qrs,n(αrn) = [αr
nsrn(π
rσ(s),n)]
qrn
¯qrn.
To prove our characterization, it suffices to show that, givenany αr
n ∈ R++ that satisfies (27), the vector of per-outcomeprofits(
πrσ(s),nq
rs,n(α
rn)− crn
(qrs,n(α
rn)), s ∈ S
)
(πrσ(s),nq
rs,n(α
rn)− crn
(qrs,n(α
rn)), s ∈ S
)(28)
for any αpn that does not satisfy (27). Since pσ(s) > 0 for all
s ∈ S, it then follows that:
PFrn|αr
n=
∑s
pσ(s)
(πrσ(s),nq
rs,n(α
rn)− crn
(qrs,n(α
rn)))
>∑s
pσ(s)
(πrσ(s),nq
rs,n(α
rn)− crn
(qrs,n(α
rn)))
= PFrn|αr
n.
Suppose s ∈ 1, . . . , i. From (26a) and the fact that crn isstrictly convex, we infer that πr
σ(s),n ≤ cr′n (¯qrn). From (27a),
we infer that qrs,n(αrn) =
¯qrn. Then:
crn(qrs,n(α
rn))
≥ crn(¯qrn) + cr′n (
¯qrn)
(qrs,n(α
rn)−
¯qrn)
≥ crn(¯qrn) + πr
σ(s),n
(qrs,n(α
rn)−
¯qrn)
= crn(qrs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)),
where the first inequality follows from the fact that crn isstrictly convex, the second inequality follows from πr
σ(s),n ≤cr′n (
¯qrn) and qrs,n(α
rn) ≥
¯qrn, and the last equality follows from
qrs,n(αrn) =
¯qrn. Furthermore, if qrs,n(α
rn) >
¯qrn, then the first
inequality is strict, and hence:
crn(qrs,n(α
rn))
> crn(qrs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)).
Suppose s ∈ i+1, . . . , j. From (26b) and (27b), we inferthat qrs,n(α
rn) = cr′−1
n (πrσ(s),n) and
¯qrn < qrs,n(α
rn) < qrn. From
¯qrn < qrs,n(α
rn) < qrn, and the fact that srn(π
rσ(s),n) 6= 0 and
αrn 6= αr
n, we infer that qrs,n(αrn) 6= qrs,n(α
rn). Then:
crn(qrs,n(α
rn))
> crn(qrs,n(α
rn)) + cr′n (q
rs,n(α
rn))
(qrs,n(α
rn)− qrs,n(α
rn))
= crn(qrs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)),
where the first inequality follows from the fact that crn isstrictly convex and qrs,n(α
rn) 6= qrs,n(α
rn) and the equality
follows from qrs,n(αrn) = cr′−1
n (πrσ(s),n).
Suppose s ∈ i+1, . . . , S. From (26c) and the fact that crnis strictly convex, we infer that πr
σ(s),n ≥ cr′n (qrn). From (27c),
we infer that qrs,n(αrn) = qrn. Then:
crn(qrs,n(α
rn))
≥ crn(qrn) + cr′n (q
rn)
(qrs,n(α
rn)− qrn
)≥ crn(q
rn) + πr
σ(s),n
(qrs,n(α
rn)− qrn
)= crn(q
rs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)),
where the first inequality follows from the fact that crn isstrictly convex, the second inequality follows from πr
σ(s),n ≥cr′n (q
rn) and qrs,n(α
rn) ≤ qrn, and the last equality follows from
qrs,n(αrn) = qrn. Furthermore, if qrs,n(α
rn) < qrn, then the first
inequality is strict, and hence:
crn(qrs,n(α
rn))
> crn(qrs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)).
Hence, for all s ∈ S:
crn(qrs,n(α
rn))
≥ crn(qrs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn − qrs,n(α
rn)). (29)
Moreover, this inequality is strict for some s ∈ S. If i < j, theinequality is strict for s ∈ i+1, . . . , j. If i = j, then, sinceαrn does not satisfy (27), there exists some s ∈ 1, . . . , i
such that αrns
rn(π
rσ(s),n) >
¯qrn or some s ∈ i + 1, . . . , S
such that αrns
rn(π
rσ(s),n) < qrn, and hence there exists some s ∈
1, . . . , i such that qrs,n(αrn) >
¯qrn or some s ∈ i+1, . . . , S

14
such that qrs,n(αrn) < qrn, and the inequality in (29) is strict
for that s. Hence, we conclude that:(crn(q
rs,n(α
rn)), s ∈ S
)
(crn(q
rs,n(α
rn)) + πr
σ(s),n
(qrs,n(α
rn)− qrs,n(α
rn)), s ∈ S
)for any αr
n that does not satisfy (27). By rearranging terms,we obtain (28).
Step 2: Characterizing dispatch generators’ optimal bidsαd given their prices πd. Note that the profit maximizationproblem for a dispatch generator is a special case of thatfor a regulation generator with S = 1. By applying thecharacterization in step 1, we infer that αd
n ∈ R++ maximizesPFd
n if and only if:
αdns
dn(π
dn) ≤
¯qdn, if cd′−1
n (πdn) ≤
¯qdn; (30a)
αdn = γd
n, if¯qdn < cd′−1
n (πdn) < qdn; (30b)
αdns
dn(π
dn) ≥ qdn, if qdn ≤ cd′−1
n (πdn). (30c)
Step 3: Characterizing prices (πd,πr) given bids (αd,αr)using KKT conditions. First, we take the same approach as inthe proof of Theorem 1 and reformulate ˆED and ˆFR beforeapplying the KKT conditions. Relabeling the variable qr toqr1 in ˆED gives:
minqd,qr
1
∑n∈N
(Kcdn(q
dn) +Kcrn(q
r1,n)− δnq
dn
)s.t. (qd,qr
1,0) ∈ Ω(d1).(31)
And substituting qrs = qr + rrs in ˆFR gives:
minqrs
∑n∈N
crn(qrs,n)
s.t. (qd,qr1,q
rs − qr
1) ∈ Ω(ds).(32)
Substituting sdn = cd′−1n (·)/γd
n and srn = cr′−1n (·)/γr
n intothe definition of cdn and crn implies that:
cdn(qdn) =
∫ qdn
¯qdn
cd′n ((γdn/α
dn)w) dw,
crn(qrn) =
∫ qrn
¯qrn
cr′n ((γrn/α
rn)w) dw.
Hence, (31) has a continuous and strictly convex objective andlinear constraints. Thus, from the KKT conditions, (qd,qr
1) isan optimal solution to (31) if and only if (qd,qr
1,0) ∈ Ω(d1)and there exists
¯ξ, ξ ∈ RN
+ ,¯ν1, ν1 ∈ RN
+ ,¯µ1, µ1 ∈ RL
+, λ1 ∈R such that:(
Kcd′n ((γdn/α
dn)q
dn), n ∈ N
)+ ξ −
¯ξ −Kπd = 0; (33a)
Ld(qd,¯ξ, ξ) = 0; (33b)(
Kcr′n ((γrn/α
rn)q
r1,n), n ∈ N
)+ ν1 −
¯ν1 −Kπr
1 = 0; (33c)
Lr(qr1, ¯ν1, ν1) = 0; (33d)
Lf (qd,qr1,¯µ1, µ1) = 0, (33e)
where:
πd = (1/K)(π(λ1,
¯µ1, µ1) + δ
); (33f)
πr1 = (1/K)π(λ1,
¯µ1, µ1). (33g)
Similarly, from the KKT conditions, qrs is an optimal solution
to (32) if and only if (qd,qr1,q
rs − qr
1) ∈ Ω(ds) and thereexists
¯νs, νs ∈ RN
+ ,¯µs, µs ∈ RL
+, λs ∈ R such that:(cr′n ((γ
rn/α
rn)q
rs,n), n ∈ N
)+ νs −
¯νs − πr
s = 0; (34a)
Lr(qrs, ¯νs, νs) = 0; (34b)
Lf (qd,qrs,¯µs, µs) = 0, (34c)
where:
πrs = π(λs,
¯µs,µs). (34d)
Step 4: Showing that, at an equilibrium, the productionschedule is the unique optimal solution to ˆED- ˆFR. Let(qd,qr) be an optimal solution to ˆED(d1) and rrs be anoptimal solution to ˆFR(qd,qr,ds). We will show that:
qd =([αd
nsdn(π
dn)]
qdn
¯qdn, n ∈ N
);
qr =([αr
nsrn(π
r1,n)]
qrn
¯qrn, n ∈ N
);
rrs =([αr
nsrn(π
rs,n)]
qrn
¯qrn
− [αrns
rn(π
r1,n)]
qrn
¯qrn, n ∈ N
).
It suffices to show that, if (qd,qr1) is an optimal solution
to (31) and qrs is an optimal solution to (32), then:
qd =([αd
nsdn(π
dn)]
qdn
¯qdn, n ∈ N
); (35)
qrs =
([αr
nsrn(π
rs,n)]
qrn
¯qrn, n ∈ N
). (36)
By rewriting (33a) for dispatch generator n, we infer that:
qdn = αdns
dn
(πdn +
¯ξn/K − ξn/K
).
If¯qdn < qdn < qdn, then from (33b), we infer that ξn =
¯ξn = 0,
which implies that qdn = αdns
dn(π
dn). If qdn =
¯qdn, then
from (33b), we infer that ξn = 0 and¯ξn ≥ 0, which implies
that¯qdn = qdn = αd
nsdn(π
dn +
¯ξn/K) ≥ αd
nsdn(π
dn), where the
last inequality follows from the fact that cdn is strictly convex.If qdn = qdn, then from (33b), we infer that
¯ξn = 0 and ξn ≥ 0,
which implies that qdn = qdn = αdns
dn(π
dn−ξn/K) ≤ αd
nsdn(π
dn),
where the last inequality follows from the fact that cdn isstrictly convex. Hence, we conclude that qd is given by (35).By making similar arguments, we conclude that qr
s is givenby (36).
Step 5: Showing that any production schedule (qd,qr, rr)that solves SY STEM can be obtained using bids (γd,γr)and the latter satisfy the characterizations in steps 1 to 3.By Theorem 1, (qd,qr) is the unique solution to ED(d1)and rrs is the unique solution to FR(qd,qr,ds). Underbids (γd,γr), the problems ED(d1) and ˆED(d1) areequivalent. Hence, (qd,qr) is the unique solution to ˆED,and by step 4, the production in the first time period is(qd,qr). Under bids (γd,γr), the problems FR(qd,qr,ds)and ˆFR(qd,qr,ds) are equivalent. Hence, rrs is the uniquesolution to ˆFR(qd,qr,ds), and by step 4, the recourse pro-duction is rrs. Hence, the production schedule is (qd,qr, rr).
It suffices to show that bids (γd,γr) constitute an equilib-rium. It is easy to check that αr = γr and αd = γd satisfyconditions (27) and (30) respectively for any prices (πd,πr).Hence, simply choose (πd,πr) based on equations (33)and (34). This proves part (a) of the proposition.

15
Step 6: Showing that any bids (αd,αr) that satisfy thecharacterizations in steps 1 to 3 give the same dispatch asthat under bids (γd,γr). Suppose that (αd,αr) satisfy thecharacterizations in step 4 with productions (qd,qr
1, . . . ,qrS),
Lagrange multipliers (¯ξ, ξ,
¯ν, ν,
¯µ, µ,λ), and prices (πd,πr).
We will construct¯ξ′, ξ′ ∈ RN
+ and¯ν′1, ν
′1 ∈ RN
+ such that:(Kcd′n (q
dn), n ∈ N
)+ ξ′ −
¯ξ′ −Kπd = 0; (37a)
Ld(qd,¯ξ′, ξ′) = 0; (37b)(
Kcr′n (qr1,n), n ∈ N
)+ ν′
1 − ¯ν′1 −Kπr
1 = 0; (37c)
Lr(qr1, ¯ν′1, ν
′1) = 0, (37d)
and¯ν′s, ν
′s ∈ RN
+ for all s ∈ S \ 1 such that:(cr′n (q
rs,n), n ∈ N
)+ ν′
s − ¯ν′s − πr
s = 0; (38a)
Lr(qrs, ¯ν′s, ν
′s) = 0, (38b)
which are the KKT conditions for (31) and (32) under bids(γd,γr). Then, step 5 allows us to infer that the productionschedule is an optimal solution to SY STEM . Our construc-tion is given by:
¯ξ′n =
K
(cd′n (
¯qdn)− πd
n
), if qdn =
¯qdn;
0, else,
ξ′n =
K
(πdn − cd′n (q
dn)), if qdn = qdn;
0, else,
¯ν′1,n =
K
(cr′n (
¯qrn)− πr
1,n
), if qr1,n =
¯qrn;
0, else,
ν′1,n =
K
(πr1,n − cr′n (q
rn)), if qr1,n = qrn;
0, else,
and:
¯ν′s,n =
cr′n (
¯qrn)− πr
s,n, if qrs,n =¯qrn;
0, else,
ν′s,n =
πrs,n − cr′n (q
rn), if qrs,n = qrn;
0, else,
for all s ∈ S \ 1.First, we show that
¯ξ′, ξ′,
¯ν′s, ν
′s ≥ 0. Suppose qdn =
¯qdn.
Then, from (30a), we infer that cd′−1n (πd
n) ≤¯qdn, and since
cdn is strictly convex, we infer that πdn ≤ cd′n (
¯qdn), and hence
¯ξ′n ≥ 0. Suppose qdn = qdn. Then, from (30c), we infer thatcd′−1n (πd
n) ≥ qdn, and since cdn is strictly convex, we infer thatπdn ≥ cd′n (q
dn), and hence ξ′n ≥ 0. By similar arguments, we
infer that¯ν′s,n ≥ 0 and ν′s,n ≥ 0.
Second, we show that this construction satisfies (37)and (38). It is easy to check that the complementary slacknessconditions (37b), (37d), (38b) are satisfied. Suppose
¯qdn <
cd′−1n (πb
n) < qdn. From (30b), we infer that αdn = γd
n. Fromthe fact that qdn =
[αdns
dn(π
dn)]qdn¯qdn
= cd′−1n (πd
n), we infer that
¯qdn < qdn < qdn. From (33b), we infer that
¯ξn = ξn = 0.
Substituting into (33a), we infer that our construction satis-fies (37a). Suppose cd′−1
n (πdn) ≤
¯qdn. From (30a), we infer
that qdn =¯qdn. Hence, our construction satisfies (37a). Suppose
qdn ≤ cd′−1n (πd
n). From (30c), we infer that qdn = qdn. Hence,
our construction satisfies (37a). Using similar arguments, wecan infer that our construction satisfies (37c) and (38a). Thisproves part (b) of the proposition.