Embed Size (px)
Citation preview

1
Distributed Joint Power, Association and FlightControl for Massive-MIMO Self-Organizing
Flying DronesZhangyu Guan, Member, IEEE, Nan Cen, Member, IEEE,
Tommaso Melodia, Fellow, IEEE, and Scott Pudlewski, Member, IEEE
Abstract—This article studies distributed algorithms to controlself-organizing flying drones with massive MIMO networkingcapabilities - a network scenario referred to as mDroneNet. Weattempt to answer the following fundamental question: what isthe optimal way to provide spectrally-efficient wireless access toa multitude of ground nodes with mobile hotspots mounted ondrones and endowed with a large number of antennas; when we cancontrol the position of the drone hotspots, the association betweenthe ground users and the drone hotspots, as well as the pilotsequence assignment and transmit power for the ground users?To the best of our knowledge, this is the first time that massiveMIMO capabilities are considered in self-organizing flying dronenetworks.
We first derive a mathematical formulation of the problemof joint power, association and movement control in mDroneNet,with the objective of maximizing the aggregate spectral efficiencyof the ground users. It is shown that the resulting network controlproblem is a mixed integer nonlinear nonconvex programming(MINLP) problem. Then, a distributed solution algorithm withpolynomial time complexity is designed by solving three closely-coupled subproblems: access association, joint pilot sequenceassignment and power control, and drone movement control.As a performance benchmark, a globally-optimal but centralizedsolution algorithm is also designed based on a combination of thebranch and bound framework and convex relaxation techniques.Results indicate that the distributed solution algorithm convergesfast (within tens of iterations) and achieves a network spectralefficiency very close to the global optimum obtained by thecentralized solution algorithm (over 90% in average).
Index Terms—Wireless Drone Networking, Massive MIMO,Distributed Control, Nonconvex Optimization.
I. INTRODUCTION
Wireless data traffic is drastically increasing following theincreased prevalence of video streaming applications and theexplosion of the Internet of Things (IoT), such as augmentedreality, intelligent transportation and surveillance [2]–[6]. Thishas resulted in an increasing demand for faster wireless com-munication networks with higher spectral efficiency, as wellas techniques to reduce the interference between co-located
This work is based upon material supported in part by Air Force ResearchLaboratory under Contract FA8750-14-1-0074. A preliminary, shorter versionof this paper was presented at the Mediterranean Ad Hoc NetworkingWorkshop (Med-Hoc-Net), Capri, Italy, June 2018 [1].
Zhangyu Guan is with the Department of Electrical Engineering, Universityat Buffalo, The State University of New York, Buffalo, NY 14260 USA; NanCen is with the Department of Computer Science, Missouri University ofScience and Technology, Rolla, MO 65401 USA; Tommaso Melodia is withthe Department of Electrical and Computer Engineering, Northeastern Uni-versity, Boston, MA 02115 USA; Scott Pudlewski is with Air Force ResearchLaboratory (AFRL), Rome, NY 13440, USA (e-mail: [email protected];[email protected]; [email protected]; [email protected]).
ACKNOWLEDGMENT OF DISCLAIMER: Any opinions, findings andconclusions or recommendations expressed in this material are those of theauthor(s) and do not necessarily reflect the views of AFRL.
wireless links operating on the same spectrum bands andhence to increase the spectral efficiency [7], [8]. In this article,we focus on studying new approaches to provide groundconnectivity by exploring the application of self-organizingflying drones (aka unmanned aerial vehicles or UAVs) withmassive MIMO networking capabilities, a network scenariowe refer to as mDroneNet.1
mDroneNet. As illustrated in Fig. 1, in mDroneNet thereare a set of many-antenna-enabled flying drones to collabo-ratively provide data collection and forwarding services to agroup of single-antenna ground users, and send to the groundusers control commands generated either locally at the dronesor in a remote fusion center. A wide range of new applicationscan be enabled by using massive MIMO on UAVs, includ-ing high-data-rate mobile multimedia sensing and networkingthrough massive MIMO communications, beamforming-basedspectrum sharing and coexistence in the unlicensed spectrumbands with redeployable drone base stations, secure wire-less networking in contested environments through massive-MIMO-based directional communications, aerial edge comput-ing with massive-MIMO-enabled flying drones, among others.In this article, we attempt to study the best way to providespectrally-efficient wireless access to a group of ground userswith mobile hotspots mounted on flying drones and endowedwith a large number of antennas; when we can control themovement of the drones, access association, as well as thepilot assignment and transmit power for the massive MIMOcommunications between the ground users and the drones.It is worth pointing out that the operation time of a droneis affected by different factors, including the lifetime of thebattery, the energy source type, as well as the weight, speedand flight trajectory of the drone, among others [10]. Recentlynew technologies have been proposed to extend the batteryduration, e.g., automated battery swap and recharge [11], [12]and dynamic recharging scheduling [13], [14].
In mDroneNet these network control strategies are tightlycoupled with each other and should therefore be jointlyconsidered to obtain the optimal network operating point.Compared to infrastructure-based cellular networks with staticmassive MIMO base stations [9], [15]–[18], a peculiar featureof mDroneNet is that the drone hotspots can provide coverage
1It is reasonable to integrate massive MIMO on UAVs. This is becausemassive MIMO can achieve realistic form factors as long as different groundusers have distinct spatial channel characteristics rather than that the antennasobserve uncorrelated channels [9]. As a result, e.g., at 2 GHz frequencyband it requires only a 0.75× 0.75 meter array to deploy 100 dual-polarizedantennas, for which it is practical to deploy the antennas on currently availablecommercial off-the-shelf UAVs.

2
RTDLM
Northeastern University
Title Text
Single-Antenna Ground Users
Many-Antenna-Enabled Drone Hotspots
Pilot and Access
Association
Movement
Control
Power
Control
Fig. 1: mDroneNet: Wireless networks with massive-MIMO self-organizing flying UAVs.
with higher spectral efficiency, by moving dynamically toadapt to the changes in the location or traffic demands of theground nodes, nodes leaving or joining the network, as well astime and the spatially-varying interference level, among others.Moreover, in mDroneNet a massive MIMO transmission istypically conducted in two phases: pilot-based channel esti-mation and data transmission, while all the ground nodes areallowed to operate over the entire available spectrum band andat any transmission time. In this setting, the maximum numberof ground nodes associated to a drone hotspot is constrainedby the length (in symbols) of the pilot sequences used inthe channel estimation phase. Pilot contamination will occurif the same pilot sequence is shared by multiple users, andthis will result in degraded accuracy of channel estimationand hence lower spectral efficiency [19], [20]. Therefore, itis imperative to jointly regulate the transmit power of theground nodes as well as the association among the groundnodes, the drone hotspots and the available pilot sequences, toeliminate the mutual interference caused by imperfect channelorthogonalization in the case of limited number antennas ateach drone.
Novelty and Contributions. Massive MIMO networkinghas recently received a significant attention in the scientificliterature [9], [15]–[18], [21]–[30]. Readers are referred to[9], [19], [20], [31], [32] and references therein for ex-cellent surveys of the main results in this area. However,most existing research on massive MIMO has been focus-ing on theoretical analysis of spectral/energy efficiency [15],designing new beamforming signal processing technologies[9], [16], increasing robustness against both unintended in-terference [17], [18] and one-way/two-way droning [26]–[30]in infrastructure-based cellular networks with static massive-MIMO-enabled base stations, while the potential of massiveMIMO in infrastructure-less wireless ad hoc networks has notbeen explored yet. While unmanned aerial networking hasalso attracted extensive research in the past decade with alarge and growing body of literature [33]–[52], very few ofthese work has taken massive MIMO into consideration. Tothe best of our knowledge, this is for the first time massiveMIMO is considered in large-scale wireless networks with self-organizing flying drone hotspots.
As will be clear in Section III, the resulting mDroneNet con-trol problem studied in this article is a mixed integer nonlinearnonconvex programming (MINLP) problem because of thebinary variables for access association and pilot assignment.
Such problems are generally NP-hard and there is no existingsolution algorithm that can be used to obtain the globallyoptimal solution with polynomial computational complexity.In this paper, we claim the following main contributions:• mDroneNet framework and formulation. We study for
the first time mDroneNet, a new framework for self-organizing aerial drone hotspots with massive MIMOnetworking capabilities. Our objective is to maximize thespectral efficiency of mDroneNet by jointly controllingthe movement of the drones, access association and pilotassignment, as well as the transmit power of the groundusers.
• Distributed solution algorithms. As in [53], we focus ondistributed algorithm design for mDroneNet. Comparedto centralized control, distributed control does not requirethe network to collect the full statistical channel stateinformation (CSI), the power of noise and locations,among other network parameters, from all the groundusers and flying UAVs at a centralized control entity.As a result, the network control does not suffer fromthe single point of failure problem and hence is morerobust. Moreover, distributed algorithms are essentialparticularly in large-scale wireless networks with multipleself-organizing UAVs and ground users for scalable andlow-latency network control. In this work, we decomposethe resulting MINLP problem into three distributed sub-problems based on primal decomposition, and designsolution algorithms for each of them: user-drone accessassociation, joint pilot assignment and power control, anddrone movement control.
• Globally optimal solution algorithm. To provide a perfor-mance benchmark for the distributed solution algorithm,we design a centralized but globally optimal solutionalgorithm based on a combination of the branch andbound framework and of convex relaxation techniquesthat can result in an ε-optimal solution with ε being apredefined level of optimality precision.
• Performance evaluation. The performance of the pro-posed distributed solution algorithm is evaluated in termsof network spectral efficiency by comparing it to theglobal optimum through extensive simulation experi-ments. Results indicate that the distributed solution al-gorithm can achieve on average over 90% of the globaloptimum. The convergence behaviors of the proposedsolution algorithms are also evaluated.

3
The remainder of the paper is organized as follows. We reviewrelated work in Section II, and describe the system model andproblem formulation in Section III. In Sections IV and V, wepresent the distributed solution algorithm and the centralizedsolution algorithm, respectively. Performance evaluation of theproposed solution algorithms is presented in Section VI, andfinally we draw conclusions in Section VII.
II. RELATED WORK
There is a large and growing body of literature on un-manned aerial vehicular networking, focusing on UAV-assistedguidance [33], UAV-based data collection [34], [37], [38] andrelaying [35], [36], [39], [41], [43], [45], [46], ground-aerialchannel measurements [40] as well as tracking and control ofUAV networks [42], [44], [54]. Readers are referred to [47]–[52] and references therein for an extensive survey of thisresearch area. Most of these works focus on single-antennaaerial vehicles and conventional MIMO, with very few recentefforts considering massive MIMO [54]. Different from [54],where Chandhar et al. derived the achievable uplink capacityfrom a many-antenna ground base station to a set of single-antenna aerial drones, in this paper we maximize the aggregatethroughput of single-antenna ground nodes served by a set ofaerial drones each endowed with a large number of antennas.
Compared to conventional multiuser MIMO, massiveMIMO can attain much higher spectral efficiency by usinga large number of antennas with low-complexity linear pre-coding technologies [16], [19], [27]–[30], [55]. In [29], theauthors derived an exact achievable rate expression in closed-form for maximum-ratio combining/maximum-ratio transmis-sion (MRC/MRT) processing and an analytical approximationof the achievable rate for zero-forcing (ZF) processing formulti-pair full-duplex massive MIMO relay system. In [27],Jin et al. derived the ergodic rates in the case of a finitenumber of antennas and concluded that the ergodic sum-ratecan be maintained while the relay power is scaled down bya factor of the number of the antennas at the relay overthe number of users. Amarasuriya investigated in [28] multi-user massive MIMO relay networks with ZF-processing byderiving the achievable sum rate expressions in both perfectand imperfect CSI cases. In [55], the problem of joint powerand time allocation is addressed for secure communicationsin a decode-and-forward massive MIMO relaying system inthe presence of adversary eavesdroppers. In [30], the spectraland energy efficiency for multiple amplify-and-forward two-way full-duplex massive MIMO relay systems are studied.Finally, [9], [19], [20], [31], [32] contain good surveys andtutorials on massive MIMO networking. These papers arefocused on infrastructure-based cellular networks with staticmany-antenna-enabled base stations, and focus on asymptoticperformance analysis with respect to a single network param-eter (e.g., power). Our paper, instead, considers for the firsttime aerial drone hotspots with massive MIMO capabilities ininfrastructure-less network scenarios2.
2Each drone hotspot is essentially a mobile base station and can serveas the mobile infrastructure for ground wireless networks. In this paper byinfrastructure-less networks we refer to wireless networks without centralizedcoordination of the self-organizing flying hotspots.
TABLE I: Summary of Key Notations
Notation Physical MeaningA Set of all aerial dronesG Set of all ground usersGa Set of ground users associated to drone a ∈ AW Set of pilot sequences available to mDroneNetαga 1 if ground user g is associated to drone a, and 0 otherwiseα Access association vector: (αga)
a∈Ag∈G
pg Transmit power of ground user g ∈ Gp Transmit power vector of ground nodes: (pg)g∈G
µgw1 if pilot sequence w ∈ W is used by ground user g,and 0 otherwise
µ Pilot sequence assignment vector: (µgw)w∈Wg∈G
xa, ya, za x-, y- and z-axis coordinates of drone a ∈ A
x,y, zx-, y- and z-axis coordinate vector of drones: (xa)a∈A,(ya)a∈A, and (za)a∈A
pmax Maximum transmit power of ground nodeγg Achievable SINR of ground node g ∈ Gτ Pilot sequence length in symbolM The number of antennas of each drone hotspota(g) Service aerial drone of node g ∈ Gβg′g Channel gain from ground node g′ to aerial drone a(g)
IgThe set of ground users sharing the same pilot sequencewith user g
A(Ig) Set of aerial drones of interfering nodes in IgHg′g Path loss from ground node g′ to aerial drone a(g)ρg Nominal SNR for ground user gGa The number of ground users served by drone a ∈ AGmax Maximum of Ga
Rg Achievable throughput of ground node g ∈ G
III. SYSTEM MODEL AND PROBLEM STATEMENT
We consider wireless networks where a set of many-antennadrone hotspots serve a set of single-antenna ground users,as illustrated in Fig. 1. The drones collect field informationfrom the users, make action decisions either locally at eachdrone or by sending the information fusion results to a remotecontrol center, and finally send the action commands back tothe ground users. Our objective is to maximize the network-wide spectral efficiency for the uplink transmissions sinceit causes only low-level traffic load to transmit informationfusion results and control commands in the downlinks. Weconsider joint control of the movement of aerial drones, theassociation among the ground users and the drones, as well asthe pilot sequence assignment and transmit power control forthe ground nodes. It is worth pointing out that we considersingle-antenna ground users in mDroneNet because we wantto keep the theoretical analysis and algorithm design tractable,while the control of mDroneNet with multiple-antenna groundusers will be studied in our future research. Next, we formalizethe network control problem by describing the system model.The key notations are summarized in Table I for the reader’sconvenience.
System Model. As mentioned in Section I, a massiveMIMO transmission is typically accomplished in two phases,i.e., channel estimation and data transmission [19], [20], [31].In our case, the ground users send a set of pilot sequencesto the drones for channel estimation in the first phase, whilein the second phase the drones detect the data from the usersbased on the estimated channel state information (CSI). DenoteA, G and W as the sets of the drone hotspots, ground users,and the available pilot sequences, respectively. Define αga as

4
the access association variable. Let αga = 1 if user g ∈ G isassociated with drone a ∈ A, and αga = 0 otherwise. Denotethe access association vector as α , (αga)a∈Ag∈G . Similarly,let µ = (µgw)w∈Wg∈G represent the pilot sequence allocationvector, with µgw = 1 if pilot sequence is associated to grounduser g and µgw = 0 otherwise. We consider single-homeaccommodation for the ground users in favor of tractablecomplexity in modeling and theoretical analysis, i.e., eachground user is associated to at most one drone hotspot andat most one pilot sequence. Then we have
αga ∈ {0, 1}, ∀g ∈ G, a ∈ A (1)µgw ∈ {0, 1}, ∀g ∈ G, w ∈ W (2)∑a∈A
αga ≤ 1, ∀g ∈ G, (3)∑g∈G
αga ≤ Gmax, ∀a ∈ A, (4)∑w∈W
µgw ≤ 1, ∀g ∈ G, (5)
where Gmax is the maximum number of ground users thatcan be served by each drone hotspot a ∈ A.3 Let Ga ⊂ Gand G′w ⊂ G represent the set of users associated with dronea and the set of users sharing the same pilot sequence w,respectively, i.e., Ga , {g| g ∈ G, αga = 1} for eacha ∈ A, and G′w , {g| g ∈ G, µgw = 1} for each w ∈ W .Denote w(g) as the pilot sequence used by ground user g, andlet Ig(µ) , G′w(g) represent the set of users using the samepilot sequence as user g. Similarly, denote a(g) as the servicedrone of ground user g ∈ G.
Let xa, ya and za represent respectively the x-, y- and z-axiscoordinates of drone a, and define the coordinate vector for thedrones in A as x = (xa)a∈A, y = (ya)a∈A and z = (za)a∈A.Then, the distance between user g′ and the service drone ofuser g (i.e., drone a(g)), denoted as dg′g , can be expressed as
dg′g , dg′g(xa(g), ya(g), za(g))
=√
(xa(g) − xg′)2 + (ya(g) − yg′)2 + (za(g) − zg′)2, (6)
where xg′ , yg′ and zg′ represent the x-, y- and z-axis coor-dinates of ground user g′ ∈ G, respectively. Further denoteβg′g as the channel gain between ground user g′ ∈ G anddrone a(g) (i.e., the service drone of user g). Then βg′gcan be expressed as βg′g = Hg′gζg′g , where ζg′g representsthe log-normal slow fading between user g′ and drone a(g),Hg′g , d−χg′g is location-dependent path loss with χ being pathloss factor and the distance dg′g defined in (6).
3The maximum number of served ground nodes cannot exceed the numberof antennas available to each aerial drone and the length of pilot sequencesused in channel estimation [15].
In this work we focus on the applications of UAVs innetworking environments in rich-scattering environments withdense and high blockage, while UAV networking in otherscenarios [9], [54], [56]–[59], e.g., LoS-dominant wirelessenvironments, will be studied in our future work. In thissetting, we consider a model similar to [60], [61] to expressthe effective SINR achievable by uplink massive MIMOcommunication links, which jointly considers the effects ofpilot contamination and mutual interference among the groundusers. Then, a lower bound of the link capacity achievable byground user g in the data transmission phase, denoted as Cg ,can be represented as
Cg = B log2(1 + γg), (7)
with γg being a lower bound of the effective SINR achievableby ground user g ∈ G given as in (8) at the bottom ofthis page,4 where τ is the length (in symbols) of each pilotsequence, M represents the number of antennas availableat each aerial drone, ρg is nominal transmit signal-to-noiseratio (SNR) at ground user g; |Ga(g)(α)| is the cardinality ofGa(g)(α), i.e., the set of ground users served by the servicedrone of user g; and finally
ξg′g ,∑
l∈Ig′ (µ)
ρlβlg (9)
and φg′g is defined as
φg′g =
βg′g, if a(g′) /∈ A(Ig(µ))
βg′g
(1− τρg′βg′g
1+τξg′g
), otherwise,
(10)
with A(Ig(µ)) , {a(g′)|g′ ∈ Ig(µ)} representing the setof service drones of the ground users in Ig(µ), i.e., theusers sharing the same pilot sequence with user g. Theaverage rate achievable in the channel estimation and datatransmission phases, denoted as Rg , can then be expressedas Rg = (1− τ
T )Cg , where Cg is the link capacity achievablein the data transmission phase in (7), and τ and T arethe length of pilot sequences and the period of a massiveMIMO transmission in symbols, respectively [62]. In thiswork, we design distributed control algorithms for mDroneNet
4It is worth pointing out that we do not assume perfect CSI in thispaper. This is because the SINR model accounts for different practicalfactors that affect massive MIMO networks, including channel-estimationerror, the type of linear spatial multiplexing/de-multiplexing, power control,noncoherent inter-cell interference, and coherent inter-cell interference due topilot contamination, among others [60], [61]. In this setting, as pointed out in[61], (8) provides a lower bound on the achievable SINR while deriving theexact closed-form expression of the achievable SINR is still an open problemas of today. In this work, we study the distributed joint power, association andflight control in self-organizing massive-MIMO drone networks taking thisSINR model as an example, while the resulting network control frameworkis not restricted to any specific SINR models.
γg , γg(α, µ, p, x, y, z) =
(M − |Ga(g)(α)|
)τρgβ
2gg(x, y, z)pg/(1 + τξgg)
1 +∑g′∈G
φg′gpg′ +
τ(M−|Ga(g)(α)|)∑
g′∈Ig(µ)\gρg′β
2g′g(x, y, z)pg′
1+τξgg
(8)

5
RTDLM
Northeastern University
Title Text
Access Association Joint Pilot and Power Allocation Drone Movement Control
Access Requests with Preference Coefficients
Make Offers for Access Association
Calculate Penalization
Update Power and Pilot Allocation Vectors
Association- and Interference-AwareDrone Movement
Optimization
x(ν+1), y(ν+1), z(ν+1)
𝜶(v+1)
p, 𝜋p(v+1)
𝜶𝝀
x(ν), y(ν), z(ν)
𝝀
𝜶𝜋
p,𝝁
𝝁
𝜶(v+1)
𝝁(v+1)
Fig. 2: Diagram of the distributed solution algorithm. The shaded blocks with dashed border represent operations of the dronehotspots while blocks with solid border for the ground users.
by considering data-transmission-phase link capacity (7) andfixed length of pilot sequences in channel estimation phase.
Problem Statement. Our objective is to maximize theaggregate capacity of all the ground users in G and hencethe network spectral efficiency of the mDroneNet, by jointlydetermining the access association vector α, pilot sequenceassignment vector µ, the location vectors x, y and z for thedrones, as well as the transmit power vector p. The problemis formalized in Problem 1 as follows.
Problem 1Given : A, G, Gmax,M, x, y, z
Maximizeα,µ,p,x,y,z
: U ,∑g∈G
Cg(α,µ,p,x,y, z)
Subject to : 0 ≤ pg ≤ pmax, ∀g ∈ G,xmin ≤ xa ≤ xmax, ∀a ∈ A,ymin ≤ ya ≤ ymax, ∀a ∈ A,zmin ≤ za ≤ zmax, ∀a ∈ A,Constraints (1), (2), (3), (4), (5)
(11)
where x, y and z are the location vectors of the ground users;Cg(α,µ,p,x,y, z) = Cg , the objective function of user g, isthe lower bound of the rate achievable by the user, as definedthrough (7)-(10); pmax is the maximum transmit power of eachof the ground users in G; and finally [xmin xmax] represent thex-axis movement range of the drones while [ymin ymax] and[zmin zmax] are the ranges of the y- and z-axis, respectively.
The utility function U in (11) is a nonlinear nonconcavefunction with respect to the control variables because of thecomplicated mathematical expression of the effective SINRin (8). Moreover, Problem 1 in (11) is a mixed integer-continuous programming problem because of the binary accessassociation variables α and pilot assignment variables µ.Given an arbitrary such problem, there is in general no existingsolution algorithm that can be used to obtain the globaloptimum in polynomial computational complexity. Next, wefirst present in Section IV a distributed solution algorithmthat can be used to achieve a sub-optimal solution to providea lower-bound on the utility function U in (11). Then inSection V we will design a centralized solution algorithm toprovide a performance benchmark for the distributed solutionalgorithm.
IV. DISTRIBUTED SOLUTION ALGORITHM
A key step of the distributed solution algorithm design is todecompose the original network control problem into a seriesof subproblems, by solving which in a distributed manner
the original problem can be solved [63], [64]. However, inour case the control variables α,µ,p,x, y and z are closelycoupled with each other in the complicated mathematicalexpression of the effective SINR in (8). As a result, thenetwork control problem, i.e., Problem 1 in (11), is architec-turally indecomposable.5 In this work, the distributed solutionalgorithms are designed by decomposing the network controlproblem following a primal decomposition approach. Roughlyspeaking, with primal decomposition Problem 1 in (11) issolved by dividing the feasible set of the original problem intomultiple parts by fixing a subset of variables at a time, whichare drone location variables x,y and z, association variablesα as well as transmit power vector p and pilot sequenceassignment variables µ. The overall diagram of the algorithmdesign is illustrated in Fig. 2, where the original problemis solved by iteratively solving three subproblems obtainedfrom primal decomposition, i.e., access association, joint pilotassignment and power control, and movement control for thedrones.A. Access Association
The core idea of the proposed access association strategy isto let the ground users in G interact iteratively with the dronehotspots in A to compete for association opportunities basedon certain locally-calculated preference criterion, as illustratedin Fig. 2. To this end, in each iteration the ground users firstreport their own association preferences to the drones, whichthen make association offers based on the received preferenceinformation. Let x(ν), y(ν) and z(ν) represent the coordinatesof the drones in current iteration ν. Then in iteration ν +1 the objective of the access association is to maximize theaggregate capacity of all the ground users in A by determiningthe association vector α(ν+1) subject to association constraints(1), (3) and (4).
Denote A(ν)g ⊂ A as the set of drones nearby ground user
g ∈ G (i.e., the drones in the communication range of theground user). Then, the association preference of ground nodeg with respect to drone a ∈ A(ν)
g , denoted as λga, can becomputed as
λga =log(1 + γga)∑
a′∈A(ν)g
log(1 + γga′), (12)
5A problem is architecturally decomposable if its dual problem obtained byintroducing Lagrange multipliers can be rewritten into a set of subproblems,each of which can be solved locally in a single protocol layer and networkdevice [63].

6
where γga′ represents the interference-free single-input-single-output (SISO) SINR, i.e., the SINR achievable with singleantenna and without interference from the other ground usersco-located in the mDroneNet, achievable by ground user g ifthe user is associated with drone a′ ∈ A(ν)
g . In this work, theSINR γga′ is defined as
γga′ , ρgβgg|a(g)=a′ , (13)
with ρg being the transmit SNR for ground user g andβgg|a(g)=a′ being the path loss for the wireless channelbetween ground user g and its service drone a(g). Denoteλa = (λga)g∈Ga as the preference vector drone a receives
from its nearby ground users in Ga , {g|g ∈ G, a ∈ A(ν)g }.
Then, each drone a ∈ A(ν)g first sorts λa in a descending
order and then sends association offers to a preferred set ofmaximum Gmax of ground users, as follows,
λdsca = (λg1a, λg2a, · · · , λgGmaxa︸ ︷︷ ︸
Preferred Ground Users
, · · · ), (14)
where Gmax is the maximum number of users each dronecan serve at the same time. Let Aoffer
g represent the subsetof the drones that send an association offer to ground userg, and denote |Aoffer
g | as the cardinality of Aofferg . Then, each
user accepts the association offer it receives from the dronescorresponding to the highest SISO SINR, i.e., associate withdrone a∗ with
a∗ , arg maxa∈Aoffer
g
λga, (15)
where λga is the association preference defined in (12). Theabove procedure is executed until no ground user receivesmore than one association offer. The output of this step isthe updated access association strategies, i.e., α(ν+1). Theassociation strategy is summarized in Algorithm 1.
Remark 1: In the association strategy described inAlgorithm 1, the rationale of computing the associationpreference as in (13), i.e., based on the interference-free SISOSINR, is as follows. In massive MIMO settings, particularlywhen the number of antennas M is large, the received SINRis dominated by the power of noise and large-scale fadingeffects, e.g., path loss, shadow fading. Therefore, the capacitywith interference-free SISO capacity, i.e., (12), can serve as agood indication of association preference and can be computedwith low computational complexity.B. Joint Pilot Assignment and Power Control
With given coordinates of the drones and the updated accessassociation vector, i.e., α(ν+1) obtained in Section IV-A, as
Algorithm 1: Competition-based Access Association
Data: Drone coordinates x(ν), y(ν) and z(ν)
Result: Updated association vector α(ν+1)
1 Initialization: Set |Aofferg | = |A|, ∀g ∈ G;
2 Operations for Ground Users:3 while ∃g ∈ G, |Aoffer
g | > 1 do4 for each user g ∈ G do5 if |Aoffer
g | ≤ 1 then6 continue;7 else8 for each drone a ∈ Ag , calculate association
preference λga based on (12) and (13);9 broadcast the calculated λga;
10 end11 accept association offers based on (15);12 update α(ν+1);13 end14 end15 Operations for Drones:16 for each drone a ∈ A do17 make association offers based on (14);18 end
shown in Fig. 2, the objective in the second network controlsubproblem is to jointly determine the pilot assignment andtransmit power for the ground users. The subproblem can beformalized as
Problem 2Given : x(ν),y(ν), z(ν),α(ν+1)
Maximizeµ, p
: U ,∑g∈G
Cg(µ, p)
Subject to : 0 ≤ pg ≤ pmax, ∀g ∈ G,Constraints (2), (5).
(16)
As discussed in Section III, Problem 2 in (16) is a mixed inte-ger nonlinear and nonconvex programming (MINLP) problembecause of the complicated mathematical expression of theeffective SINR γg(µ, p) in (8) and that the pilot sequence as-signment variables take only binary values. Such problems aregenerally NP-hard and there is typically no existing solutionalgorithm than can be used to obtain the global optimum inpolynomial computational complexity. In this section, we solveProblem 2 by designing a pricing-based distributed solutionalgorithm. To this end, we first reformulate Problem 2 byrelaxing the binary pilot sequence assignment variables µ.
Problem Reformulation. We first relax the pilot sequence
γgw(p) =
(M − |Ga(g)|
)τρgβ
2ggpgw/(1 + τξgg)
1 +∑g′∈G
∑w′∈W
µg′g(µ)pg′w′ +
τ(M−|Ga(g)|)∑
g′∈Ig\g
∑w′∈W
ρg′β2g′gpg′w′
1+τξgg
(19)
=
(M − |Ga(g)|
)τρgβ
2ggpgw
(1 + τξgg)(1 +∑g′∈G
∑w′∈W
µg′g(µ)pg′w′) + τ(M − |Ga(g)|
) ∑g′∈Ig\g
∑w′∈W
ρg′β2g′gpg′w
(20)

7
Problem 2 (penal)Given : x,y, z,α, p(ν)
Maximizepg
: Ug(pg; p(ν)−g) +
∑g′∈G\g
∇pgUg′(p(ν))(pg − p(ν)
g )
︸ ︷︷ ︸Penalization Item
−ψg2‖pg − p(ν)
g ‖2︸ ︷︷ ︸Convexification Item
Subject to : Constraints (24), (25)
(27)
Algorithm 2: Pricing-based Joint Pilot and PowerControlData: Drone coordinates x, y, z; association strategy
α; ν = 0; current transmit power vector p(ν);η(ν) > 0
Result: Updated transmit power p(ν+1);1 for each user g ∈ G do2 Compute pg by solving Problem 2 (penal) in (27);3 Set p
(ν+1)g = p
(ν)g + η(ν)(pg − p
(ν+1)g );
4 end5 if p(ν+1) satisfies certain termination criterion then6 STOP;7 else8 Set ν = ν + 1; go to Step 1.9 end
assignment variables µ by allowing each ground user to usemultiple pilot sequences. For this purpose, let pgw representthe transmit power that ground user g ∈ G allocates to pilotsequence w ∈ W and define p = (pgw)w∈Wg∈G . Then the powerconstraints in (16) can be rewritten as
0 ≤ pgw ≤ pmax, ∀g ∈ G, w ∈ W , (17)∑w∈W
pgw ≤ pmax, ∀g ∈ G. (18)
Then, for each pilot sequence w ∈ W , the effective SINRγg defined through (8)-(10) can be redefined as γgw(p) foreach ground user g ∈ G, as in (19) and (20) at the bottom ofthis page. Then, Problem 2 in (16) can be reformulated asProblem 2 (reform):
Problem 2 (reform)Given : x(ν),y(ν), z(ν),α(ν+1)
Maximizep
: U ,∑g∈G
∑w∈W
Cgw(p)
Subject to : Constraints (17), (18),
(21)
where Cgw(p) = B log2(1 + γgw(p)) with γgw(p) defined in(19) and (20). Next we solve Problem 2 (reform) in (21) bydesigning a distributed pricing-based solution algorithm.
Pricing-based Solution Algorithm. As illustrated in Fig. 2,the main idea of the pricing-based solution algorithm is to leteach ground user iteratively determine its own pilot assignmentand transmit power by maximizing a penalized version of itsown utility in each iteration. Let p(ν)
gw represent the power ofground user g when transmitting using pilot sequence w in
Algorithm 3: Pilot Sequence ClaimData: Results of joint pilot and power control: p∗
Result: Updated pilot assignment vector µ;1 Initialization: Set Wg =W,∀g ∈ G;2 Set µgw = 1, ∀g ∈ G, w ∈ W;3 for each user g ∈ G do4 Set µgw = 0 with w∗ = arg min
w∈Wg
p∗gw;
5 Set Wg =Wg \ w∗;6 end7 if
∑w∈W
µgw ≤ 1 is satisfied for all users in G then
8 STOP;9 else
10 Run Algorithm 2;11 Go to Step 3.12 end
current iteration ν. Define
p(ν)g = (log(p(ν)
gw ))w∈W , (22)
p(ν)−g = (log(p
(ν)g′w))w∈Wg′∈G\g. (23)
Then the transmit power constraints in (17) and (18) can berewritten as, in each iteration ν = 1, 2, · · · ,
p(ν)gw ≤ log(pmax), ∀g ∈ G, w ∈ W , (24)∑w∈W
ep(ν)gw ≤ pmax, ∀g ∈ G. (25)
Then, the pricing-based solution algorithm can be formal-ized in Algorithm 2 at the top of the next page, whereUg(pg, p
(ν)−g) =
∑w∈W
Cgw(pg, p(ν)−g) is the individual rate
achievable by ground user g, η(ν) is the step size in iterationν. The convergence of Algorithm 2 is given in Theorem 1.
Theorem 1. If Algorithm 2 doesn’t stop after certain numberof iterations and suppose that the step-size sequence {η(ν)} ischosen to satisfy
η(ν) ∈ (0, 1], η(ν) → 0,∑ν
η(ν) = +∞, (26)
then the algorithm converges to a stationary point ofProblem 2 (reform) defined in (27), and none of the station-ary points is local minimum of the problem.
Proof. We first show that the utility function ofProblem 2 (reform) in (27) is a strongly concave function

8
with respect to the transformed power control variablesp
(ν)g of ground user g with given control strategies p
(ν)−g
for the other users in G \ g. Since the penalization itemis an affine function of p
(ν)g and the convexification item
is strongly concave with ψg > 0, we only need to showthat Ug(pg; p
(ν)−g) is concave and the feasbile set defined by
constraints (24) and (25) is convex. Consider high SINR inmassive MIMO setting, i.e., γgw(p) � 1 in (19) and (20),then, with the logarithm transformation in (22) and (23), theachievable rate Rgw(p) in (21) can be represented in the formof minus-log-sum-exp and hence is a concave function [65].Similarly, the left-hand side of constraint (25) has a form oflog-sum-exp and hence the constraint defines a convex set.Then, the convergence of Algorithm 2 follows Theorem 3in [66].
Remark 2: In Theorem 1, the conditions on the choice ofstep-size sequence {η(ν)} is relatively weak; for instance allthe step-size rules using in diminishing gradient-like schemescan be used here. The following are two effective rules [66],given η(0) = 1:
Rule 1 : η(ν) = η(ν−1)(1− εη(ν−1)), ν = 1, 2, · · · (28)
Rule 2 : η(ν) =η(ν−1) + β1
1 + β(ν)2
, ν = 1, 2, · · · (29)
where ε ∈ (0, 1) and β1, β2 ∈ (0, 1) are predefined constantswith β1 < β2.
Pilot Sequence Claim. Recall in Section III that weconsider that each ground user occupies at most one pilotsequence. This is accomplished by pilot sequence claim basedon the results of the joint pilot and power allocation de-scribed above. Let p∗ = (p∗gw)w∈Wg∈G represent the output ofAlgorithm 2. Then the pilot sequence claim can be summa-rized in Algorithm 3 as follows, where the rationale of thepilot sequence claim is to let each user claim not to use thepilot sequence that has been allocated the least transmit power.
C. Movement Control
As illustrated in Fig. 2, in the third subproblem each dronedetermines its own best coordinates to adapt to the changes inassociation strategies and transmit power of the ground usersresulting from solving the previous two subproblems. With thenewly obtained association vector α(ν+1) and transmit powervector p(ν+1), the subproblem of aerial drone movement canbe written as, for each drone a ∈ A,
Problem 3Given : α(ν+1),µ(ν+1),p(ν+1)
Maximizex, y, z
:∑g∈Ga
Cg(x, y, z),
Subject to : xmin ≤ xa ≤ xmax, ∀a ∈ A,ymin ≤ ya ≤ ymax, ∀a ∈ A,zmin ≤ za ≤ zmax, ∀a ∈ A,
(30)
where Ga represents the set of ground users associated withdrone a with given access association vector α(ν+1). In thissubproblem, the mathematical expression of utility functionCg(x, y, z) defined in (7) has a log-convex form, whichis in general nonconcave with respect to coordinate variables
x, y and z. In this paper we solve subproblem (30) usingan interior point method [65] to search for locally-optimalcoordinates for each aerial drone in favor of a low-complexitydistributed solution.
D. Complexity Analysis
In the distributed solution algorithm, the above three sub-problems are solved iteratively and sequentially at each it-eration. In the ground-drone association subproblem, the as-sociation strategy is determined iteratively as well. In eachiteration, the association variable αga can be determined for atleast one ground node, and therefore the maximum number ofassociations is |G|, and the overall computational complexityof the association is O(|G|). The subproblem of joint powerand pilot control in (27) and the aerial drone movement controlsubproblem (30) can be solved in polynomial computationalcomplexity, i.e., O(|G||A|). Therefore, the complexity of theoverall distributed solution algorithm is O(|G|(|A| + 1)) foreach iteration.
Summary: So far, we have presented a distributed solutionalgorithm for mDroneNet (i.e., wireless ad hoc networkswith massive-MIMO drone hotspots) to jointly control themovement of the drone hotspots, the ground-drone associationas well as power control and pilot sequence assignment for theground users. A natural question is: How does the distributedsolution algorithm compare to the global optimum in termsof aggregate spectral efficiency? In the remainder of thepaper we answer this question by designing a centralizedsolution algorithm to provide a performance benchmark forthe distributed solution algorithms.
V. CENTRALIZED SOLUTION ALGORITHM
Recall from Section III that, in the social network controlproblem, i.e., Problem 1 in (11), the individual through-put Cg(α,µ,p,x,y, z) defined through (7)-(9) is a noncon-vex/nonconcave function with respect to coordinates variablesx, y, z and transmit power variables p. Moreover, the as-sociation variables α and pilot sequence assignment variablesµ take only binary values. Therefore the resulting networkcontrol problem is a mixed integer nonlinear nonconvex pro-gramming (MINLP) problem, for which there is in generalno existing solution algorithm that can be used to obtain theglobal optimum in polynomial computational complexity. Inthis paper, we design a globally optimal solution algorithmbased on a combination of the branch and bound frameworkand of convex relaxation techniques [67], [68]. Next we firstdescribe the overall algorithm design framework.
A. Overall Algorithm
Denote Γ0 = {α, µ, p, x, y, z| constraints in (11)} asthe feasible set of initial problem (11) and let U∗(Γ0) representthe global optimum of problem (11) over Γ0, then the objectiveof our algorithm is to iteratively search for a U so that
U(Γ0) ≥ εU∗(Γ0), (31)
where ε ∈ (0, 1] is predefined optimality precision. To thisend, the algorithm maintains a set Γ = {Γi, i = 0, 1, 2, · · · }

9
of subproblems by iteratively partitioning feasible set Γ0 intoa series of smaller subsets (see Section V-C)6. The algorithmalso maintains a global upper bound Uglb(Γ0) and a globallower bound Uglb(Γ0) on U∗(Γ0) so that
Uglb(Γ0) ≤ U∗(Γ0) ≤ Uglb(Γ0) (32)
to drive the iterations of subproblem partitions, as follows.• Global upper bound Uglb(Γ0): For each subproblem
Γi ∈ Γ, the algorithm computes a local upper boundU lcl(Γi) on network utility function U via convex relax-ation (see Section V-B). Then the global upper boundUglb(Γ0) can be updated as
Uglb(Γ0) = maxΓi∈Γ{U lcl(Γi)}. (33)
• Global lower bound Uglb(Γ0): Similarly, for each sub-problem Γi ∈ Γ a local lower bound U lcl(Γi) iscomputed based on the solution obtained by solving therelaxed convex network control problem. Then the globallower bound Uglb(Γ0) can be updated as
Uglb(Γ0) = maxΓi∈Γ{U lcl(Γi)}. (34)
The algorithm terminates if Uglb(Γ0) ≥ εUglb(Γ0) is reachedand the global optimum U∗(Γ0) is set to U∗(Γ0) = Uglb(Γ0)as a upper-bound benchmark. Otherwise, the algorithm selectsa subproblem from Γ and further partitions its feasible set intotwo smaller subsets, computes local upper and lower boundsand updates the global bounds Uglb(Γ0) and Uglb(Γ0) as in(33) and (34), respectively. In our algorithm, we select thesubproblem Γi ∈ Γ with the highest local upper bound topartition, i.e.,
Γi = arg maxΓi
U lcl(Γi). (35)
Based on the global bounds update criterion in (33) and (34),the gap between the two global bounds converges to 0 as thepartition progresses. Furthermore, from (32), Uglb(Γ0) andUglb(Γ0) converge to the global optimum U∗(Γ0).
B. Convex Relaxation
For each subproblem Γi ⊂ Γ, which is MINLP in our case,a key step is to obtain a relaxed but convex version of Γi sothat it is easy to compute a tight local upper bound U lcl(Γi).In this paper the convex relaxation is designed following atwo-phase approach as follows.Phase 1: In this phase the relaxation is accomplished byassuming i) there is no mutual interference among groundnodes, i.e., interference items in the denominator of (8) areset to zero, and that all ground nodes use different pilotsequences in channel estimation and hence ξgg = 0 in (8);ii) the maximum number of the ground nodes that can beassociated with a drone hotspot is not limited to Gmax in (4).Then, the objective of the relaxed network control problemis to maximize the aggregate capacity of ground nodes by
6In this paper we use Γi to refer to both subproblem i and the correspondingfeasible set.
determining the optimal coordinate x, y and z of the drones,i.e.,
Problem 4
Maximizex, y, z
: U ,∑g∈G
Cg(x, y, z)
Subject to : xmin ≤ xa ≤ xmax, ∀a ∈ A,ymin ≤ ya ≤ ymax, ∀a ∈ A,zmin ≤ za ≤ zmax, ∀a ∈ A,
(36)
where Cg(x, y, z) = B log2(1 + γg(x, y, z)) withγg(x, y, z) defined in (8). Since γg(x, y, z) � 1,Rg(x, y, z) can be approximated as
Cg(x, y, z) ≈ B log2(γg(x, y, z)) (37)
≤ B log2
(Mτρgp0ζ
2ggH
2gg(x, y, z)
)(38)
= B log2
(Mτρgp0ζ
2gg
dχgg(x, y, z)
)(39)
= B log2(Mτρgp0ζ2gg)− χB log2(dgg(x, y, z)),
(40)
where the inequality in (38) holds since Ga(g) ≥ 0 in (8), χ ispath loss factor and dgg(x, y, z) is distance (in meter) fromground node g to its service aerial drone a(g).
Since dgg(x, y, z) in (40) is a convex Euclidean normwith respect to x, y and z [65], log2(dgg(x, y, z)) cannot betheoretically guaranteed to be concave. In this phase, we obtaina convex relaxation of (40) based on linear approximation oflogarithmic function. To this end, we first replace dgg(x, y, z)in (40) with t, then log2(dgg(x, y, z) in (40) can berepresented as log2(t) subject to t ≥ dgg(x, y, z). Then,log2(t) can be further relaxed using a set of linear functions,e.g., as shown in Fig. 3, using a segment and three tangentlines.Phase 2: Phase 2 of relaxation is invoked if the algorithm isdone with partitioning coordinate variables x, y and z, i.e.,for each aerial drone a ∈ A,
xmax,a − xmin,a ≤ ∆x, (41)ymax,a − ymin,a ≤ ∆y, (42)zmax,a − zmin,a ≤ ∆z, (43)
where xmax,a and xmin,a (ymax,a and ymin,a) are upper andlower bounds of x-axis coordinate xa (y-axis coordinate ya),
t
log(
t)
t3t2t1
Tangent Line 3
Segment Line
Tangent Line 2
Tangent Line 1
Fig. 3: Approximiation of log(t) using three tangent lines and onesegment line.

10
and ∆x, ∆y and ∆z are predefined movement step size ofaerial drones in x- and y-axis, respectively. The objective inthis phase is to determine the optimal association vector αwith given aerial drones coordinates vectors x∗, y∗ and z∗
and without considering mutual interference among groundnodes as in Phase 1 relaxation. Let Cga represent the capacityachievable by ground node g ∈ G if g is associated to aerialdrone a ∈ A, then the optimal association can be obtained bysolving the following linear optimization problem:
Problem 5Given : x∗, y∗, z∗
Maximizeα
:∑a∈A
∑g∈G
αgaCga(α, x∗,y∗, z∗)
Subject to : 0 ≤ αga ≤ 1, ∀a ∈ A, g ∈ G,∑g∈G
αga ≤ Gmax, ∀a ∈ A,∑a∈A
αga ≤ 1, ∀g ∈ G.
(44)
As variable partition progresses, the association variable αgabecomes fixed either to 0 or 1 in all subproblems, for whichthe optimal transmit power p and pilot sequence assignment µcan be obtained by solving a geometric programming problemas in Section IV.
C. Variable Partition
Variable partition can be conducted by partitioning associa-tion variable α and movement variables x, y and z. For exam-ple, given a subproblem Γi ∈ Γ, by fixing association variableαga subproblem Γi can be partitioned into two subproblemswith feasible sets Γi,1 = {(α, p, x, y, z) ∈ Γi|αga = 0}and Γi,2 = {(α, p, x, y, z) ∈ Γi|αga = 1}, respectively.For movement variables, say xa ∈ [xmin,a xmax,a] for aerialdrone a ∈ A, the partition can be conducted by splitting xafrom the half, resulting in two subproblems with feasible sets
Γi,1 = {(α,p,x,y, z) ∈ Γi|xa ∈ [xmin,a xmid,a]}, (45)Γi,2 = {(α,p,x,y, z) ∈ Γi|xa ∈ [xmid,a xmax,a]}, (46)
where xmid,a , xmin,a+xmax,a
2 . As variable partition pro-gresses, the algorithm converges to the global optimum, asstated in the following theorem.
Theorem 2. With convex relaxation the variable partitionstrategies in Sections V-B and V-C, global upper bound Uglb
and global lower bound Uglb converge to the global optimumU∗ of the original social network control problem formulatedin (11).
Proof. To show convergence of the globally optimal solutionalgorithm, it is sufficient to show that the algorithm convergeswith respect to aerial drone movement variables x, y and zsince i) there is a finite number of possible combinations ofassociation strategies for a given set A of aerial drones andset G of ground nodes, and ii) the power control subproblemis a convex optimization problem.
For this purpose, we first redefine the domain set based onthe notation of hyper-rectangle. The initial ranges of aerialdrone movement variables xa, ya and za for each aerial dronea ∈ A are [0 xmax], [0 ymax] and [0 zmax], respectively.
This results in an initial feasible set, which is an L = 2|A|-dimensional hyper-rectangle denoted as Γinit with |A| beingthe number of aerial drones in A. As in Section V, denote Γas the set of sub-rectangles obtained from partitioning Γinit asthe iteration goes. For any sub-rectangle Γ ∈ Γ, denote vlupp
and vllwr as the upper and lower bound of the lth edge of therectangle with l = 1, · · · , L. For example, for the x-axis of theinitial domain set Γinit, we have vllwr = 0 and vlupp = xmax.Further define the size, volume (vol), and condition number(cond) of Γ as follows:• size(Γ) ≡ max
l=1,··· ,L12 (vlupp − vllwr), i.e., the maximum of
half edge length;• vol(Γ) ≡
∏l=1,··· ,L
(vlupp − vllwr), i.e., the edge length
production;
• cond(Γ) ≡max
l=1,··· ,L(vlupp−v
llwr)
minl=1,··· ,L
(P lupp−P llwr), i.e., the ratio of the
maximum and the minimum edge lengths.Then, considering the domain partition strategy described inSection V (i.e., in each iteration, partition the variable that hasthe largest range from its middle), after a sufficiently largenumber of iterations, say k, the following inequality holds:
minΓ∈Γ
size(Γ) ≤ max{cond(Γinit), 2}(
vol(Γinit)
k
), (47)
which implies that the minimum size (hence the largest rangeof movement variables) in all subproblems converges to zeroas k →∞, i.e., the ranges of aerial drone movement variablesxa and ya shrink to constant for all drones a ∈ A.
Denote Γ∗ as the sub-rectangle with the smallest size.Then, inequality (47) further implies that the local upper andlower bounds over Γ∗, i.e., U(Γ∗) and U(Γ∗), converge toeach other if i) it holds for any sub-rectangle Γ ∈ Γ thatthe local upper bound U(Γ) is non-increasing as Γ shrinks,which is true because that the algorithm partitions aerial dronemovement variables (x, y and z) from their middle, andii) the local upper bounds U(Γ)) are non-increasing, whichfollows that the highest local lower bound is always used inthe algorithm.
Then, as the local upper and lower bounds over Γ∗ convergeto each other, we can find a δ > 0 for any optimality precisionε ∈ (0 1) such that any sub-rectangle Γ with size(Γ) ≤ δsatisfies U(Γ) ≥ εU(Γ). Take the iteration index k sufficientlylarge so that the size of all sub-rectangles in Γ do not exceed δ,then we have Uglb = max
Γ∈ΓU(Γ) ≥ εmax
Γ∈ΓU(Γ) = Uglb.
VI. PERFORMANCE EVALUATION
We evaluate the performance of the proposed networkcontrol solution algorithms by considering a network area of500×500 m2 while the altitude of the drone hotspots is set to100 meters for simplicity of the simulations. The number ofthe ground users is set to {2, 4, 6, 8, 10, 12}, and the numberof the drone hotspots is set to {2, 3}. The number of antennasof each drone hotspot is set to {10, 20, 30, 40, 50, 100}. Themaximum transmit power of each ground user is set to{20, 40, 60, · · · , 500} mW. The path loss factor is set toχ = 2, and the average noise power is set to 10−8 mW. The

11
0 10 20 30 40 50 60
Iteration Index
100
200
300
400
500
x-ax
is (
m)
Drone 1Drone 2
0 10 20 30 40 50 60
Iteration Index
0
100
200
300
400
y-ax
is (
m)
Drone 1Drone 2
0 10 20 30 40 50
Iteration Index
150
155
160
165
170
175
180
Net
wor
k S
pect
ral E
ffici
ency
(bp
s/H
z)
0 100 200 300 400 500 600
Iteration Index
70
75
80
85
90
95
100
Opt
imal
ity R
atio
(%
)
Predefined Optimality Precision
(a) (b) (c)
Fig. 4: (a) x- and y-axis of the drone hotspots and (b) aggregate network spectral efficiency with the distributed solutionalgorithm; (c) optimality ratio with the centralized solution algorithm.
0 5 10 15 20
Network Topology Instance
0
20
40
60
80
100
120
Net
wor
k S
pect
ral E
ffici
ency
(bp
s/H
z)
DistributedCentralized
0 5 10 15 20
Network Topology Instance
0
50
100
150
200
250
Net
wor
k S
pect
ral E
ffici
ency
(bp
s/H
z)
DistributedCentralized
(a) (b)Fig. 5: Aggregate network spectral efficiency with the distributed and centralized solution algorithms with (a) 4 ground users,2 drone hotspots with each having 100 antennas, and 8 pilot sequences, and (b) 8 ground users, 2 drone hotspots with eachhaving 20 antennas, and 6 pilot sequences.
number of the available pilot sequences is set to {6, 8}, and thelength of each pilot sequence is set to 10 symbols. The resultsare obtained by averaging over 20 independent simulationinstances with network topology randomly generated. Next,we first discuss the convergence of the distributed and cen-tralized solution algorithms, and then evaluate the optimalityof the distributed solution algorithm by comparing it to thecentralized. Finally we study the effects of different networkcontrol strategies on the aggregate network spectral efficiency.
Convergence. The convergence of the distributed solutionalgorithm and the centralized solution algorithm is shown inFig. 4. In Fig. 4(a), two drone hotspots and eight groundusers are considered and the initial locations of the dronesare randomly generated within the networking area. It can beseen that the movement of the drone hotspots converge quicklyin around 40 iterations. In Fig. 4(b) we plot the resulting
aggregate network spectral efficiency of all the ground users.It can be seen that the network spectral efficiency convergesquickly as well. The convergence of the centralized solutionalgorithm is shown in Fig. 4(c). The optimality precision isset to 90% and the maximum number of iterations is setto 5000. In can be seen that the optimality ratio convergesmonotonically as the interation progresses and the prede-fined optimality precision is reached in 600 iterations. Thecomputational complexity of the distributed and centralizedsolution algorithms is compared in terms of the number ofiterations required to converge in the case of different numberof ground nodes. We tested 20 more network instances with thenumber of ground nodes varying from 2 to 10. Results showedthat both the distributed and centralized solution algorithmsconverge in all the tested instances. With distributed solutionalgorithms it takes on average 25 iterations to coverage, e.g.,

12
4 5 6 7 8 9 10 11 12
Number of Ground Nodes
0
50
100
150
200
250
300
350
400N
etw
ork
Spe
ctra
l Effi
cien
cy (
bps/
Hz)
DistributedCentralized
97% 88.6%
Fig. 6: Network spectral efficiency in the case of different numberof ground users.
15, 26 and 35 iterations in the cases of 2, 8 and 10 groundnodes, respectively. The centralized solution algorithm takesmore iterations than the distributed to converge. For example,it takes 4592 iterations for the centralized solution algorithmto converge in the case of 8 ground nodes and 4688 iterationson average. It is worth pointing out that while the centralizedsolution algorithm has higher computational complexity, theobjective of the centralized solution algorithm is to provide abenchmark performance for the distributed solution algorithm.
Optimality. Figure 5 reports the network spectral efficiency,i.e., the spectral efficiency summed over all the users in thenetwork, achievable by the distributed solution algorithm andthe centralized global optimum. Four ground users, 2 dronehotspots and 8 pilot sequences are considered in Fig. 5(a)while 8 ground users, 2 drones and 6 pilot sequences inFig. 5(b). It can be seen that in both cases the distributedsolution algorithm achieves an aggregate network spectralefficiency very close to the global optimum in all of the 20tested network topology instances, with average optimality of97% and 91% for Figs. 5(a) and (b), respectively. ComparingFig. 5(b) to Fig. 5(a) it can be found that, as expected, theaggregate network spectral efficiency increases as more usersare accommodated in the network, e.g., from 105 bps/Hz to165 bps/Hz for the distributed solution algorithm.
The average performance of the achievable network spectralefficiency is reported in Fig. 6 with different number of groundusers. Results indicate that in average around 92.5% of theglobal optimum can be achieved by the distributed solutionalgorithm, and the optimality is 97%, 98% and 88.6% with 4,8 and 12 ground users, respectively. It is also noticed that theachievable network spectral efficiency increases linearly withthe number of the served ground users in the setting of theconsidered mDroneNet.
In Fig. 7 we plotted the achievable network spectral effi-ciency against the maximum transmit power of the groundusers. Eight ground users and 2 drone hotspots each having
50 100 150 200 250
Maximum Transmit Power (mW)
0
50
100
150
200
250
Net
wor
k S
pect
ral E
ffici
ency
(bp
s/H
z)
DistributedCentralized97% 90%
95%
Fig. 7: Network spectral efficiency in the case of different maximumtransmit power for the ground users.
100 antennas are considered in this experiment. On averageover 93% of the global optimum can be achieved by thedistributed solution algorithms, with 95%, 97% and 90%for transmit power in [20 80] mW, [100 160] mW and[180 220] mW, respectively. From the results of the central-ized solution algorithm we noticed that the aggregate networkspectral efficiency rises only around 4.5% by increasing themaximum transmit power by 2.4 times from 100 to 240 mW.This is because in massive MIMO setting the network basicallyoperates at high SINR regime, i.e., in bandwidth-limitedregime.
The network spectral efficiency is reported in Fig. 8 withthe number of antennas for each drone hotspot varies from20 to 100, with 8 ground users and 6 pilot sequences. Thedistributed network control strategy achieves on average over93.5% of the global optimum obtained by the centralizedsolution algorithm. We notice that the achievable networkspectral efficiency monotonically increases with the numberof antennas but at a decreasing speed. This is consistent withthe results in [9, Fig. 4(a)]. It is worth pointing out that,comparing to [9, Fig. 4(a)], the network spectral efficiencygain achievable by using more antennas is less significant inour case, e.g., in this experiment the effect of increasing thenumber of antennas is only marginal if each drone hotspothas more than 30 antennas. This is because our objective isto study joint power, association and flight control in self-organizing massive-MIMO-enabled UAV networks, and in thissetting the network spectral efficiency is jointly determinedby all the affecting factors. As a future research direction wewill study how many antennas are required to achieve certainspectral efficiency in self-organizing UAV networks.
We further study the effects of different network con-trol strategies on the achievable network spectral efficiencythrough Figs. 9-10, where the joint network control strategy iscompared to the other four strategies: (i) the locations of thedrone hotspots are randomly generated in “w/o Aerial Drone

13
10 20 30 40 50 60 70 80 90 100
Number of Antennas
0
50
100
150
200
250
300
350N
etw
ork
Spe
ctra
l Effi
cien
cy (
bps/
Hz)
DistributedCentralized
Fig. 8: Network spectral efficiency in the case of different numberof antennas for the drone hotspots.
Movement”; (ii) the transmit power is randomly generatedfor the ground users in “w/o Power Control”; (iii) the ac-cess association is executed only once in “w/o AssociationControl”; and (iv) the pilot sequence assignment is executedonly once in “w/o Pilot Assignment”. In Fig. 9 the experimentconsiders 12 ground users sharing 6 pilot sequences and 2drone hotspots each having 100 antennas. We can see that thejoint network control achieves the highest aggregate networkspectral efficiency in almost all of the tested instances. Anobvious performance degradation can be observed withoutpower control for the ground users or movement control for thedrone hotspots, which are 5% and 4% on average, respectively.It can also be noticed that a spectral efficiency very closeto that of joint control can be achieved by “w/o AssociationControl” and “w/o Pilot Assignment”. This implies that onlyone-time access association and one-time pilot assignmentwould be sufficient in the joint network control. Similar resultsare reported in Fig. 10 where three drone hotspots are usedto serve 12 ground users with each drone endowed with100 antennas. Unsurprisingly, the aggregate network spectralefficiency can be significantly improved by using more dronehotspots, while the performance degradation because of thelack of power control reduces to less than 4% on average.
VII. CONCLUSIONS
We studied wireless ad hoc networking with massive-MIMOdrone hotspots. The network control objective is to maximizenetwork-wide spectral efficiency by jointly controlling themovement of the drones, associating single-antenna groundnodes to many-antenna drones, and adapting the transmitpower as well as the pilot sequence assignment for the groundnodes. The network control problem was formulated as amixed integer nonlinear nonconvex programming (MINLP)problem. Both distributed and globally optimal solution algo-rithms have been designed and evaluated with extensive sim-ulation results. Results indicated that the distributed solution
0 5 10 15 20
Network Topology Instance
150
160
170
180
190
200
210
220
Net
wor
k S
pect
ral E
ffici
ency
(bp
s/H
z)
Joint Controlw/o Movement Controlw/o Power Controlw/o Assocation Controlw/o Pilot Assignment
Fig. 9: Network spectral efficiency achievable with different networkcontrol strategies: 12 ground users, 2 drone hotspots.
0 5 10 15 20
Network Topology Instance
200
210
220
230
240
250
260
270
280
290
300N
etw
ork
Spe
ctra
l Effi
cien
cy (
bps/
Hz)
Joint Controlw/o Movement Controlw/o Power Controlw/o Assocation Controlw/o Pilot Assignment
Fig. 10: Network spectral efficiency achievable with different net-work control strategies: 12 ground users, 3 drone hotspots.
algorithm converges within tens of iterations and can achievearound 90% of the global optimum.
REFERENCES
[1] Z. Guan, N. Cen, T. Melodia, and S. Pudlewski, “Self-Organizing FlyingDrones with Massive MIMO Networking,” in Proc. of MediterraneanAd Hoc Networking Workshop (Med-Hoc-Net), Capri, Italy, June 2018.
[2] Y. Liu and S. K. Das, “Information-intensive wireless sensor networks:potential and challenges,” IEEE Communications Magazine, vol. 44,no. 11, pp. 142–147, November 2006.
[3] V. J. Hodge, S. O’Keefe, M. Weeks, and A. Moulds, “Wireless SensorNetworks for Condition Monitoring in the Railway Industry: A Survey,”IEEE Transactions on Intelligent Transportation Systems, vol. 16, no. 3,pp. 1088–1106, June 2015.
[4] R. Iyer, “Visual IoT: Architectural Challenges and Opportunities,” IEEEMicro, vol. 36, no. 6, pp. 45–49, November/December 2016.

14
[5] J. Gubbi, R. Buyya, S. Marusic, and M. Palaniswami, “Internet of Things(IoT): A Vision, Architectural Elements, and Future Directions,” FutureGener. Comput. Syst., vol. 29, no. 7, pp. 1645–1660, September, 2013.
[6] M. Deruyck, J. Wyckmans, L. Martens, and W. Joseph, “Emergency Ad-Hoc Networks by Using Drone Mounted Base Stations for a DisasterScenario,” in Proc. of International Workshop on Emergency Networksfor Public Protection and Disaster Relief, October 2016.
[7] M. Noura and R. Nordin, “A Survey on Interference Managementfor Device-to-Device (D2D) Communication and Its Challenges in 5GNetworks,” Journal of Network and Computer Applications (Elsevier),vol. 71, pp. 130–150, August 2016.
[8] S. Ali and A. Ahmad, “Resource Allocation, Interference Management,and Mode Selection in Device-to-Device Communication: A Survey,”Emerging Telecommunications Technologies, pp. 1–36, March 2017.
[9] E. Bjornson, E. G. Larsson, and T. L. Marzetta, “Massive MIMO: TenMyths and One Critical Question,” IEEE Communications Magazine,vol. 54, no. 2, pp. 114–123, February 2016.
[10] M. Mozaffari1, W. Saad, M. Bennis, Y.-H. Nam, and M. Debbah, “ATutorial on UAVs for Wireless Networks: Applications, Challenges, andOpen Problems ,” IEEE Communications Surveys & Tutorials, pp. 1–28,accepted for publication, 2019.
[11] K. A. Swieringa, C. B. Hanson, J. R. Richardson, J. D. White, Z. Hasan,E. Qian, and A. Girard, “Autonomous Battery Swapping System forSmall Scale Helicopters,” in Proc. IEEE International Conference onRobotics and Automation, Anchorage, AK, USA, May 2010.
[12] T. Toksoz, J. Redding, M. Michini, B. Michini, and J. P. How, “Auto-mated Battery swap and Recharge to Enable Persistent UAV Missions,”in Proc. Infotech@Aerospace, 2011.
[13] A. Trotta, M. DiFelice, K. R. Chowdhury, and L. Bononi, “Fly andRecharge: Achieving Persistent Coverage using Small Unmanned AerialVehicles (SUAVs),” in Proc. IEEE International Conference on Commu-nications (ICC), Paris, May 2017.
[14] M. Shin, J. Kim, and M. Levorato, “Auction-Based Charging SchedulingWith Deep Learning Framework for Multi-Drone Networks,” IEEETransactions on Vehicular Technology, vol. 68, no. 5, pp. 4235–4248,May 2019.
[15] H. Q. Ngo, E. G. Larsson, and T. L. Marzetta, “Energy and SpectralEfficiency of Very Large Multiuser MIMO Systems,” IEEE Trans. onCommun., vol. 61, no. 4, pp. 1436–1449, April 2013.
[16] T. L. Marzetta, “Noncooperative Cellular Wireless with UnlimitedNumbers of Base Station Antennas,” IEEE Transactions on WirelessCommunications, vol. 9, no. 11, pp. 3590–3600, November 2010.
[17] J. Zhu, R. Schober, and V. K. Bhargava, “Secure Transmission inMulticell Massive MIMO Systems,” IEEE Transactions on WirelessCommunications, vol. 13, no. 9, pp. 4766–4781, September 2014.
[18] Y. Wu, R. Schober, D. W. K. Ng, C. Xiao, and G. Caire, “Secure MassiveMIMO Transmission With an Active Eavesdropper,” IEEE Trans. onInfo. Theory, vol. 62, no. 7, pp. 3880–3900, July 2016.
[19] E. G. Larsson, O. Edfors, F. Tufvesson, and T. L. Marzetta, “MassiveMIMO For Next Generation Wireless Systems,” IEEE CommunicationsMagazine, vol. 52, no. 2, pp. 186–195, February 2014.
[20] T. L. Marzetta, “Massive MIMO: An Introduction,” Bell Labs TechnicalJournal, vol. 20, pp. 12–22, 2015.
[21] E. Bjornson, J. Hoydis, and L. Sanguinetti, “Massive MIMO hasUnlimited Capacity,” IEEE Transactions on Wireless Communications,vol. 17, no. 1, pp. 574–590, Jan. 2018.
[22] A. Garcia-Rodriguezy, G. Geraciy, and L. G. Giordanoy, “MassiveMIMO Unlicensed: A New Approach to Dynamic Spectrum Access,”IEEE Communications Magazine, vol. 56, no. 6, pp. 186–192, June2018.
[23] D. Bethanabhotla, O. Y. Bursalioglu, H. C. Papadopoulos, and G. Caire,“Optimal User-Cell Association for Massive MIMO Wireless Networks,”IEEE Trans. on Wireless Communications, vol. 15, no. 3, pp. 1835–1850,March 2016.
[24] J. Zhu and W. Xu, “Securing Massive MIMO Via Power Scaling,” IEEECommunications Letters, vol. 20, no. 5, pp. 1014–1017, May 2016.
[25] K. Zheng, L. Zhao, J. Mei, B. Shao, W. Xiang, and L. Hanzo, “Surveyof Large-Scale MIMO Systems,” IEEE Communications Surveys &Tutorials, vol. 17, no. 3, pp. 1738–1760, Third Quarter 2015.
[26] H. A. Suraweera, H. Q. Ngo, T. Q. Duong, C. Yuen, and E. G. Lars-son, “Multi-pair amplify-and-forward relaying with very large antennaarrays,” in Proc. of IEEE International Conference on Communications(ICC), June 2013, Budapest, Hungary.
[27] S. Jin, X. Liang, K. K. Wong, X. Gao, and Q. Zhu, “Ergodic RateAnalysis for Multipair Massive MIMO Two-Way Relay Networks,”IEEE Transactions on Wireless Communications, vol. 14, no. 3, pp.1480–1491, March 2015.
[28] G. Amarasuriya, “Sum Rate Analysis for Multi-User Massive MIMORelay Networks,” in Proc. IEEE Global Communications Conference(GLOBECOM), December 2015, San Diego, CA, USA.
[29] H. Q. Ngo, H. A. Suraweera, M. Matthaiou, and E. G. Larsson, “Multi-pair Full-Duplex Relaying With Massive Arrays and Linear Processing,”IEEE Journal on Selected Areas in Communications, vol. 32, no. 9, pp.1721–1737, September 2014.
[30] Z. Zhang, Z. Chen, M. Shen, and B. Xia, “Spectral and Energy Effi-ciency of Multipair Two-Way Full-Duplex Relay Systems With MassiveMIMO,” IEEE Journal on Selected Areas in Communications, vol. 34,no. 4, pp. 848–863, April 2016.
[31] L. Lu, G. Y. Li, A. L. Swindlehurst, A. Ashikhmin, and R. Zhang, “AnOverview of Massive MIMO: Benefits and Challenges,” IEEE Journalof Selected Topics in Signal Processing, vol. 8, no. 5, pp. 742–758,October 2014.
[32] D. C. Araujo, T. Maksymyuk, A. L. de Almeida, T. Maciel, J. aoC.M. Mota, and M. Jo, “Massive MIMO: Survey and Future ResearchTopics,” IET Communications, vol. 10, no. 15, pp. 1938–1946, October2016.
[33] V. Sharma and R. Kumar, “A Cooperative Network Framework forMulti-UAV Guided Ground Ad Hoc Networks,” Journal of Intelligent& Robotic Systems, vol. 77, pp. 629–652, 2015.
[34] I. Jawhar, NaderMohamed, J. Al-Jaroodi, and S. Zhang, “A Frameworkfor Using Unmanned Aerial Vehicles for Data Collection in LinearWireless Sensor Networks,” Journal of Intelligent & Robotic Systems,vol. 74, pp. 437–453, 2014.
[35] F. Ono, H. Ochiai, and R. Miura, “A Wireless Relay Network Based onUnmanned Aircraft System With Rate Optimization,” IEEE Trans. onWireless Communications, vol. 15, no. 11, pp. 7699–7708, Nov. 2016.
[36] L. Sboui, H. Ghazzai, Z. Rezki, and M.-S. Alouini, “Achievable Ratesof UAV-Relayed Cooperative Cognitive Radio MIMO Systems,” IEEEAccess, vol. 5, pp. 5190–5204, April 2017.
[37] S. Kandeepan, K. Gomez, L. Reynaud, and T. Rasheed, “Aerial-Terrestrial Communications: Terrestrial Cooperation and Energy-Efficient Transmissions to Aerial Base Stations,” IEEE Trans. onAerospace and Electronic Systems, vol. 50, no. 4, pp. 2715–2735, Oct.2014.
[38] K. Daniel, S. Rohde, N. Goddemeier, and C. Wietfeld, “Cognitive AgentMobility for Aerial Sensor Networks,” IEEE Sensors Journal, vol. 11,no. 11, pp. 2671–2682, Nov. 2011.
[39] D. H. CHOI, S. H. KIM, and D. K. SUNG, “Energy-Efficient Maneu-vering and Communication of a Single UAV-Based Relay,” IEEE Trans.on Aerospace and Electronic Systems, vol. 50, no. 3, pp. 2320–2327,July 2014.
[40] T. J. Willink, C. C. Squires, G. K. Colman, and M. T. Muccio, “Mea-surement and Characterization of Low-Altitude Air-to-Ground MIMOChannels,” IEEE Trans. on Vehicular Technology, vol. 64, no. 4, pp.2637–2648, April 2016.
[41] P. Ladosz, H. Oh, and W.-H. Chen, “Optimal Positioning of Communica-tion Relay Unmanned Aerial Vehicles in Urban Environments,” in Proc.of International Conference on Unmanned Aircraft Systems (ICUAS),Arlington, VA USA, June 2016.
[42] Y. Zhou, M. Chen, and C. Jiang, “Robust Tracking Control of UncertainMIMO Nonlinear Systems with Application to UAVs,” IEEE/CAAJournal of Automatica Sinca, vol. 2, no. 1, pp. 25–32, Jan. 2015.
[43] D. Orfanus, E. P. de Freitas, and F. Eliassen, “Self-Organization asa Supporting Paradigm for Military UAV Relay Networks,” IEEECommunications Letters, vol. 20, no. 4, pp. 804–807, April 2016.
[44] S. Morgenthaler, T. Braun, Z. Zhao, T. Staub, and M. Anwander,“UAVNet: A Mobile Wireless Mesh Network Using Unmanned AerialVehicles,” in Proc. of International Workshop on Wireless Networking& Control for Unmanned Autonomous Vehicles: Architectures, Protocolsand Applications, Anaheim, California, Dec. 2012.
[45] M. A. M. Marinho, E. P. de Freitas, and J. ao Paulo C. Lustosa da Costa,“Using Cooperative MIMO Techniques and UAV Relay Networks toSupport Connectivity in Sparse Wireless Sensor Networks,” in Proc. ofInternational Conference on Computing, Management and Telecommu-nications (ComManTel), Ho Chi Minh City, Vietnam, Jan. 2013.
[46] P. Zhan, K. Yu, and A. L. Swindlehurst, “Wireless Relay Communica-tions with Unmanned Aerial Vehicles: Performance and Optimization,”IEEE Trans. on Aerospace and Electronic Systems, vol. 47, no. 3, pp.2068–2085, July 2011.
[47] Ilker Bekmezci, O. K. Sahingoz, and Samil Temel, “Flying Ad-HocNetworks (FANETs): A survey,” Ad Hoc Networks (Elsevier Journal),vol. 11, no. 3, p. 1254–1270, May 2013.
[48] G. Chmaj and H. Selvaraj, “Distributed Processing Applications forUAV/drones: A Survey,” in Proc. of International Conference on Systems

15
Engineering, Advances in Intelligent Systems and Computing, Las Vegas,Nevada, August 2015.
[49] L. Gupta, R. Jain, and G. Vaszkun, “Survey of Important Issues in UAVCommunication Networks,” IEEE Communications Surveys & Tutorials,vol. 18, no. 2, pp. 1123–1152, Second Quarter 2016.
[50] E. Y. Samira Hayat and R. Muzaffar, “Survey on Unmanned Aerial Ve-hicle Networks for Civil Applications: A Communications Viewpoint,”IEEE Communications Surveys & Tutorials, vol. 18, no. 4, pp. 2624–2661, Fourth Quarter 2016.
[51] M. Erdelj, E. Natalizio, K. R. Chowdhury, and I. F. Akyildiz, “Help fromthe Sky: Leveraging UAVs for Disaster Management,” IEEE PervasiveComputing, vol. 16, no. 1, pp. 24–32, Jan.-March 2017.
[52] Y. Zeng, R. Zhang, and T. J. Lim, “Wireless Communications withUnmanned Aerial Vehicles: Opportunities and Challenges,” IEEE Com-munications Magazine, vol. 54, no. 5, pp. 36–42, May 2016.
[53] T. V. Chien, E. Bjornson, E. G. Larsson, and T. A. Le, “DistributedPower Control in Downlink Cellular Massive MIMO Systems,” in Proc.of ITG Workshop on Smart Antennas (WSA), Bochum, Germany, March2018.
[54] P. Chandhar, D. Danev, and E. G. Larsson, “Massive MIMO as Enablerfor Communications with Drone Swarms,” in Proc. of InternationalConference on Unmanned Aircraft Systems (ICUAS), Arlington, VAUSA, June 2016.
[55] J. Chen, X. Chen, W. H. Gerstacker, and D. W. K. Ng, “ResourceAllocation for a Massive MIMO Relay Aided Secure Communication,”IEEE Transactions on Information Forensics and Security, vol. 11, no. 8,pp. 1700–1711, August 2016.
[56] L. Sboui, H. Ghazzai, Z. Rezki, and M.-S. Alouini, “Achievable Ratesof UAV-Relayed Cooperative Cognitive Radio MIMO Systems,” IEEEAccess, vol. 5, pp. 5190–5204, May 2017.
[57] Q. Wu, Y. Zeng, and R. Zhang, “Joint Trajectory and CommunicationDesign for Multi-UAV Enabled Wireless Networks,” IEEE Trans. onWireless Communications, vol. 17, no. 3, pp. 2109–2121, March 2018.
[58] L. Zhang, Q. Fan, and N. Ansari, “3-D Drone-Base-Station PlacementWith In-Band Full-Duplex Communications,” Communications Letters,vol. 22, no. 9, pp. 1902–1905, June 2018.
[59] S. Jeong, O. Simeone, and J. Kang, “Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning,”IEEE Trans. on Vehicular Technology, vol. 67, no. 3, pp. 2049–2063,March 2018.
[60] H. Yang and T. L. Marzetta, “On Existence of Power Controls for Mas-sive MIMO,” in Proc. of IEEE International Symposium on InformationTheory (ISIT), Hong Kong, China, June 2015.
[61] ——, “Capacity Performance of Multicell Large-scale Antenna Sys-tems,” in Proc. Allerton Conference on Communication, Control, andComputing, Monticello, IL, Oct. 2013.
[62] T. V. Chien, C. Mollen, and E. Bjornson, “Large-Scale-Fading Decodingin Cellular Massive MIMO Systems With Spatially Correlated Chan-nels,” IEEE Trans. on Communications, vol. 67, no. 4, pp. 2746–2762,April 2019.
[63] M. Chiang, S. H. Low, A. R. Calderbank, and J. C. Doyle, “Layeringas Optimization Decomposition: A Mathematical Theory of NetworkArchitectures,” Proceedings of the IEEE, vol. 95, no. 1, pp. 255–312,January 2007.
[64] D. P. Palomar and M. Chiang, “A Tutorial on Decomposition Methodsfor Network Utility Maximization,” IEEE Journal on Selected Areas inCommunications, vol. 24, no. 8, pp. 1439–1451, August 2006.
[65] S. Boyd and L. Vandenberghe, Convex Optimization. CambridgeUniversity Press, 2004.
[66] G. Scutari, F. Facchinei, P. Song, D. Palomar, and J.-S. Pang, “De-composition by partial linearization: Parallel optimization of multi-agentsystems,” IEEE Trans. Signal Process, vol. 62, no. 3, pp. 641–656, Feb.2014.
[67] E. L. Lawler and D. E. Wood, “Branch-And-Bound Methods: A Survey,”Operations Research, vol. 14, no. 4, pp. 699–719, Jul.-Aug. 1966.
[68] H. D. Sherali and W. P. Adams, A Reformulation-Linearization Tech-nique for Solving Discrete and Continuous Nonconvex Problems.Boston: MA: Kluwer Academic, 1999.
Zhangyu Guan (M’11) received the Ph.D. degreein Communication and Information Systems fromShandong University in China in 2010. He is cur-rently an Assistant Professor with the Departmentof Electrical Engineering at the State University ofNew York at Buffalo, where he directs the Wire-less Intelligent Networking and Security (WINGS)Lab, with research interests in network design au-tomation, new spectrum technologies, and wirelessnetwork security. He has served as an Area Editorfor Elsevier Journal of Computer Networks since
July 2019. He has served as TPC chair for IEEE INFOCOM Workshopon Wireless Communications and Networking in Extreme Environments(WCNEE) 2020, Student Travel Grants Chair for IEEE Sensor, Mesh andAd Hoc Communications and Networks (SECON) 2019-2020, InformationSystem (EDAS) Chair for IEEE Consumer Communications NetworkingConference (CCNC) 2021. He has also served as TPC member for IEEEINFOCOM 2016-2020, IEEE GLOBECOM 2015-2020, IEEE MASS 2017-2019 IEEE IPCCC 2015-2019, among others.
Nan Cen (S’14-M’19) received the Ph.D. degree inElectrical Engineering from Northeastern University,Boston, MA, USA, in 2019. She is an AssistantProfessor with the Department of Computer Science,Missouri University of Science and Technology,Rolla, MO, USA. She directs the Wireless Networksand Intelligent Systems (WNIS) Lab at MST, withresearch interests in system modeling, control andprototyping for next-generation intelligent wirelessnetworks.
Tommaso Melodia (Fellow, IEEE) received thePh.D. degree in electrical and computer engineeringfrom the Georgia Institute of Technology in 2007.He is currently the William Lincoln Smith Professorwith the Department of Electrical and ComputerEngineering, Northeastern University. He is also theDirector of the Institute for the Wireless Internet ofThings, and the Director of Research for the PAWRProject Office, a public-private partnership that isdeveloping four city-scale platforms for advancedwireless research in the United States. His research
focuses on modeling, optimization, and experimental evaluation of wirelessnetworked systems, with applications to 5G networks and Internet of Things,software-defined networking, and body area networks. His research is sup-ported mostly by the U.S. federal agencies, including the National ScienceFoundation, the Air Force Research Laboratory, the Office of Naval Research,the Army Research Laboratory, and DARPA. He is a Senior Member ofthe ACM. He is the Editor-in-Chief of Computer Networks, and a formerAssociate Editor of the IEEE TRANSACTIONS ON WIRELESS COMMU-NICATIONS, the IEEE TRANSACTIONS ON MOBILE COMPUTING, theIEEE TRANSACTIONS ON MULTIMEDIA, among others.
Scott M. Pudlewski (M’12) received his B.S. inElectrical engineering from the Rochester Instituteof Technology, Rochester, NY, in 2008, and hisM.S. and Ph.D. degrees in electrical engineeringfrom the University at Buffalo, The State Universityof New York (SUNY), Buffalo, NY in 2010 and2012, respectively. He is currently an ElectronicsEngineer at the Air Force Research Laboratory inRome, NY, USA. His main research interests includevideo transmission and communications, networkingin contested tactical networks, convex optimization,
and wireless networks in general. He is a Member of the IEEE.


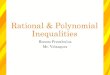


























![Nucleus Software Partners with Microsoft to deliver cloud-based lending solution globally [Company Update]](https://img.pdfslide.us/doc/110x75/577cb28a1a28aba7118c10c3/nucleus-software-partners-with-microsoft-to-deliver-cloud-based-lending.jpg)