Embed Size (px)
Citation preview

Distributed Intelligent Systems – W10:g yDistributed Sensing using R b ti S N t kRobotic Sensor Networks

Outline• Distributed sensing, search
and coverage
• Case study 1: distributed turbine inspectionturbine inspection
• Case study 2: distributed yodor localization
• Conclusion

Distributed Sensing: Problem StatementDistributed Sensing: Problem StatementDevices:
k d
- size, cost- number
Possible missions − searching
- networked- mobile
− coverage− inspecting− patrolling− mapping− …
Physical domain- engineered or natural
+ follow-up actions(e.g., cleaning, d t i i i ) - engineered or natural
- bounded or unbounded- 2D or 3D
destroying, repairing)

Coverage and Search: gBasic Algorithms and
R l W ld Pitf llReal World Pitfalls

Typical Applicationsyp pp– Cleaning, mowing
(Jaeger & Nebel 2002)
– Communication backboneCommunication backbone (McLurkin & Smith 2006)
– Guiding facility for other robots (Payton, Estkowski & Howard 2003) © James McLurkin, MIT/iRobot( y , )
– Distributed sensor (Schwager, McLurkin & Rus 2006)
– Mappingapp g(Zlot, Stentz, Dias & Thayer, 2002), (Burgard, Moors, Stachniss & Schneider, 2005)
– Urban search and rescue(Kumar Rus & Singh 2004)
© Husquarna
(Kumar, Rus & Singh 2004)
© Andrew Howard, USC/JPL© Kumar, Rus & Singh © Zlot, Stentz, Dias & Thayer

Typical Performance MetricsC ti l h ti > ti f l ti• Coverage: spatial exhaustiveness > time of completion (i.e. minimize redundant coverage but better redundancy than uncovered areas)redundancy than uncovered areas)
• Search: time of completion > spatial exhaustiveness (speed is the most important issue)(speed is the most important issue)
• Depending on a priori knowledge (e.g., target features, # of targets) some overlap possible g ) p p
• Both problem classes should be solved by minimizing system resources (e.g., energy, # of robots, node cost)y ( g gy )

Approach Overview
• Various distributed coordination
Approach Overview
Various distributed coordination approaches, incl. market-based, operations research,
© Lawitzky Siemens AG 1998computational geometry• Few instances on real system,
t ti
© Lawitzky, Siemens AG, 1998
strong assumptions on underlying hardware
• Deterministic approaches© Husquarna
• Deterministic approaches preferred because “provably complete”p
© Agmon, Hazon & Kaminka 2006

The Cost of Reality:Eff f R l W ld FEffects of Real-World Factors on Multi-Robot SearchJim Pugh and Alcherio Martinoli
IEEE International Conference on Robotics and Automation (ICRA ’07)R It lRome, ItalyApril 11, 2007

Challenges inChallenges inMulti-Robot Research
• Design and experimentation on multi-robot systems complex and difficult:y p– Numerous lengthy experiments required– High costHigh cost– Hardware failures
• Is there an alternative approach?• Is there an alternative approach?

Models and SimulationsModels and Simulations• Abstracted models
describing key aspects ofdescribing key aspects of multi-robot scenarios
• Run models computationally tocomputationally to simulate
• Fast experimentation, i i l d i kminimal cost, and quick
modification of system parameters
• More analytically tractable than real experiments e-puck robots in the realistic simulator
Webots and in the real world

Modeling Risks
• Tempting to only work with abstracted models…
• Models omit some real-world details• Not always obvious which details are• Not always obvious which details are
important and which aren’tH i h i i f i d l• How might omitting often ignored real-world details affect algorithmic design?

Case Study:M lti R b t S hMulti-Robot Search
• Goal: “find” a targetGoal: find a target with unknown location in an arena
• 8 m x 8 m arena in Webots
• Robots can detect target within 20 cm of current location
Target and e-puck robots with approximate detection ranges in Webotsapproximate detection ranges in Webots
simulator

Search Strategies
Very basic search techniques employed:• Coordinated search – pre-planned perfectCoordinated search pre planned perfect
strategy• Random search move and avoid obstacles• Random search – move and avoid obstacles• Random-Repulse search – random search
i h i b l iwith inter-robot repulsion

Distributed Coordinated Search

Distributed Random Search

Scenario 1: Ideal ConditionsScenario 1: Ideal Conditions
• Initially simulate search with perfect conditions, 100 runs• Expected completion times (tc for coordinated, tr for
Random and t for Random-Repulse) for 1 target:Random, and trr for Random-Repulse) for 1 target:
where A is area of arena, r is robot detection radius, v is , ,robot velocity, and N is number of robots

Scenario 1: Results
Asterisks represent analytical predictions

Scenario 2: Noisy SensorsScenario 2: Noisy Sensors
• In real search, detection of target in range often not guaranteed
• Probabilistic detection – Signal-to-Noise Ratio for gelectromagnetic fading channel:
where d is the distance between the robot and the target and dh is distance where signal is at half-powerand dh is distance where signal is at half-power
• See paper for expected time calculations• Repeated 100 runs in Webots simulation with half-power
distance of 0 01 mdistance of 0.01 m

Scenario 2: ResultsScenario 2: Results
Asterisks represent analytical predictions

Scenario 3: Positional NoiseScenario 3: Positional Noise• Coordinated search needs robot locationsCoordinated search needs robot locations• Possible error from:
N i l b l iti i dditi G i– Noisy global positioning – additive Gaussian noise re-sampled periodicallyC l ti d t i i dditi G i– Cumulative odometric noise – additive Gaussian noise applied at each time step
R t d i l ti ith b th t f i• Repeated simulation with both types of noise

Scenario 3: ResultsScenario 3: Results

Conclusion
• High-performing algorithms in abstracted simulation may perform badly in presence of real-world factors
• Randomized algorithms appear more resistant to these effects than highly coordinated ones
• Realistic simulation or real-world experiments needed to effectively test
lti b t l ithmulti-robot algorithms

Case Study 1: yDistributed Turbine
I tiInspection

Robotic Inspection Systemsp y
Inspection ofp– Power machinery
(Alstom inspection robotics)
– Aircraft skins © Litt, NASA Glenn, 2003c a s s(Siegel & Gunatilake 1997)
– Welding seams on ships(Sanchez, Vazquez & Paz 2005)
, ,
Sensors– Eddy current
Ultra sound © Siegel & Gunatilake 1997– Ultra-sound– Vision
© Tache, Mondada, Siegwart et al. 2007

Coordination Schemes for Distributed Boundary Coverage with a Swarm of Miniature Robots:Coverage with a Swarm of Miniature Robots:
Synthesis, Analysis and Experimental Validation
Nikolaus CorrellSeptember 20, 2007
Advisor: Prof. Alcherio Martinoli

Case Study• Turbine blade inspectionTurbine blade inspection• Initiated by the NASA Glenn
Center in 2003 (Wong & Litt 2004)
• Constraints– Extreme miniaturization– Limited communication
• Focus on multi-robot coordination rather than locomotionU t 40 b t• Up to 40 robots

MiniaturizationMiniaturization
• Size constraints render singleSize constraints render single robot approach infeasible
• Miniaturization implies pconstraints on– Energy– Computation– Sensor and actuator accuracy
C i ti– Communication
System behavior essentially y yprobabilistic

Arena60 x 65 cm2 arena60 x 65 cm arena25 blades
i h d i hWithout and without absolute localizationFaithfully reproduced in Webots

Performance Estimation
Circumnavigation ofCircumnavigation of a blades boundary
No “inspection”– No inspectionMonitor progress
i h d i iusing overhead visionAnalysis using SwisTrackhttp://swistrack.sourceforge.net

Robotic PlatformRobotic Platform• Basis: Miniature Robot Alice IIBasis: Miniature Robot Alice II
(Caprari & Siegwart, 2005)
• 2cm x 2cm x 2cm• PIC MCU at 4MHz• 368 Byte RAM• 4 infra-red distance sensors (3cm)• Local communication (6cm)• 4cm/s max. speed

Communication ModuleCommunication ModuleCompatible to Telos MoteCompatible to Telos Mote IV mote(Polastre, Szewczyk & Culler 2005)
I2C Support(Cianci, Raemy, Pugh & Martinoli 2006)
TI MCU at 8MHz4KByte RAMy2.4GHz radio (ZigBee ready)ready)

Camera ModuleCamera Module
Down-sampled VGADown-sampled VGA cameraPIC MCUPIC MCU16MHz4KByte RAMColor-bar encoding galgorithm

Distributed Boundary Distributed Boundary Coverage Algorithms Coverage Algorithms

Different Coordination Schemes for Multi Robot Systems
on
for Multi-Robot Systems
ComplexnodesDeliberative
beratio
CommunicationNo Comm.of delib
Degree
Simplenodes Reactive
D
(Kalra, PhD Thesis, CMU 2006)
Degree of coordination

A Suite of 5 Algorithmsg• 2 fully reactive algorithms:
Without absolute localization and collaboration– Without absolute localization and collaboration– Without absolute localization but with
collaboration (local marking)collaboration (local marking)• 3 deliberative algorithms:
Pl i i h b l l li i– Planning without absolute localization, no collaborationPl i ith b l t l li ti d– Planning with absolute localization and collaboration (blade map sharing)Planning with absolute localization and– Planning with absolute localization and collaboration (blade market)

Reactive Algorithms:Reactive Algorithms:No PlanningNo Planning

Reactive Algorithms for DistributedReactive Algorithms for DistributedBoundary Coverage
1. Algorithms for1. Algorithms for extremely simple, miniature robots
2. Analyze and synthesize swarms using
b bili ti l tiprobabilistic population dynamic models
ning
Local communication, limited computation, no
Plan
nlocalization Coordination

Reactive Coverage without Collaboration and Abs LocalizationCollaboration and Abs. Localization
Search Inspect Translate
AvoidAvoid Obstacle
Wall | Robot Obstacle clear
Search Inspect Translatealong bladeBlade pt
1‐pt1 pt
Tt expired

Real Robot VideoReal Robot Video

Corresponding Probabilistic ModelCorresponding Probabilistic Model
Avoid Obstacle
Avoid Obstacle
SearchSearch InspectInspect Translatealong bladeTranslate
along blade
Robotic System Environment

Macroscopic EquationsEvery state corresponds to one differenceEvery state corresponds to one difference equationConservation laws (robots blades) canConservation laws (robots, blades) can simplify the dynamic system (1 equation for one difference equation)one difference equation)Existence of a steady-state distribution can be
b l i h d l i M kproven by analyzing the underlying Markov chain

Encountering Probabilities• Probability to encounter anProbability to encounter an
object is proportional to– Robot speed– Sensor range– Size of the object and the arena
• Assumptions– Uniform distribution of robots in
the environment 1the environment– Robots encounter only one object
at a time pprpw
1
pb

Interaction timesProbabilisticProbabilisticDeterministic
iNon-Parametric Distribution
Systematic experiments with 1 or 2 robots.

Parameter CalibrationParameter CalibrationEncountering probabilityEncountering probability– Detection area– Robot speed
S– Sensor range
Interaction times– Dedicated experimentsp– Geometry
Improvement byd t fitti ( i ddata-fitting (constrained system identification technique, see also W6)
[Correll & Martinoli, DARS 2006]

Model prediction vs. Real Robot ExperimentsExperiments
20 robots 25 robots 30 robots[Correll & Martinoli, DARS 2006]

Deliberative Algorithms:Deliberative Algorithms:PlanningPlanning

Deliberative Algorithms for Di t ib t d B d CDistributed Boundary Coverage
Deliberative planningDeliberative planning– Creating a map of the
environmentenvironment– Moving towards unexplored
areasareasIncrementally raising capabilities of robotic in
g
capabilities of robotic platform
Plan
nCoordination

Deliberative Boundary Coverage with Limited Localization and Collaboration
Build a minimalBuild a minimal spanning-tree on-lineMove from blade toMove from blade to blade reactivelyL li i bLocalization by counting bladesStart-over when lost
Implicit Collaboration byImplicit Collaboration by working in parallel

Deliberative Algorithms for Di ib d B d CDistributed Boundary Coverage
• Efficient localization neededEfficient localization needed for effective exchange of informationinformation
• Known maps: near-optimal allocationsallocations
ing
Plan
niCoordination

Deliberative Coverage with Absolute gLocalization and Explicit Collaboration
B ild i i lBuild a minimal spanning-tree on-lineMove from blade to blade reactivelyAbsolute localization using cameragShare progress using explicit communication
j iexplicit communication

RobustnessRobustness• Sources of error:
– navigation error πe– localization error pf– blade attachment
• Algorithm plans always using its c rrent locationcurrent location
• Communication + Localization failure leads to performancesfailure leads to performances similar to the first deliberative algorithm g
• Patrolling

Real Robot Video

Comparing all the Five Comparing all the Five AlgorithmsAlgorithms

Quantitative Performance Comparison• RC: reactive,
implicit
Quantitative Performance Comparison
Reactive Deliberativeimplicit collaboration
• RCMM: reactive, explicit
ll b i i
+Mapping of flaws+Progress monitoring
collaboration using robot markers (beacons)
• DCWL: g gdeliberative, implicit collaboration, without absolute l li tilocalization
• DCL/MCR: deliberative, collaborative with
Size / Cost / Power Consumption / Computation
localization (DCL: map sharing; MCR: task trading)

Case Study 2: Case Study 2: Distributed Odor LocalizationDistributed Odor Localization

Bio-Inspired and Probabilistic Algorithms for Distributed Odor SourceAlgorithms for Distributed Odor Source
Localization using Mobile Robots
• Thomas LochmatterThomas Lochmatter• Prof. Alcherio Martinoli
Distributed Intelligent Systems and Algorithms Lab (DISAL)Ecole Polytechnique Fédérale de Lausanne (EPFL), Switzerland
5

Odor Source Localization
Wind flowWind flowOd Wind flowWind flowOdor source
e g :e.g.:leaking gas pipebomb / minefood

Odor Source Localization
Wind flowWind flowOd Wind flowWind flowOdor source
e g :e.g.:leaking gas pipebomb / minefood
Khepera III robot with odorand wind direction sensorand wind direction sensor

Odor Source Localization • Given:
– Area to search (GPS bounds, enclosures, etc.)– Number of robots and hardware capabilities
• Three tasks (or phases though not always serial):– Plume finding– Plume finding– Plume traversing
Source declaration– Source declaration

Plumes: A Tricky Field to TraversePlumes: A Tricky Field to Traverse
Courtesy by L. Marques,Courtesy by L. Marques, simulated plume

Algorithms
surge-spiral
castingprobabilisticrobotic search
probabilisticodor compass
crosswindformation
surge-cast
computationally cheapcomputationally cheap computationally expensivecomputationally expensive
p
infotaxis
probabilisticfunction optimizationdung beetle
p y pp y p
biased random walk
probabilisticmax. likelihood
function optimization(PSO, ...)silkworm
Braitenberg vehicle

Khepera III Robot
Differential-drive13 cm diameter13 cm diameter
400 MHz ARM CPUNo floating point unit (FPU)
Od b dOdor sensor boardWind direction sensor board

Od ( th l)Odor source (ethanol)
Systematic experiments iny pthe wind tunnelArena: 18 x 4 mWind speed: 1 m/s ( laminar)Wind speed: 1 m/s (~laminar)

Simulation in Webots

Single Robot Algorithms

Bio-Inspired AlgorithmsState machines, reactive
Binary odor concentrationy(in plume, not in plume)
Wind direction

Surge-Spiral: Algorithmg p g
Surge spiralSurge-spiral
Wind flow
Wind directionWind direction measurement

Surge-Spiral: Real Robot I l t tiImplementation

Surge Spiral: Sample TrajectorySurge-Spiral: Sample Trajectory
Upwind in the plume spiraling for reacquisitionUpwind in the plume, spiraling for reacquisition

Casting: Algorithmg g
Casting (zig-zagging)
Wind flow
β

Casting: Sample Trajectory
Crossing the plumeCrossing the plume

Surge-Cast: Algorithmg g
Surge-cast
Wind flow

Surge Cast: Sample TrajectorySurge-Cast: Sample Trajectory
Upwind in the plume casting for reacquisitionUpwind in the plume, casting for reacquisition

From Single Robot to MultiFrom Single Robot to Multi-Robot AlgorithmsRobot Algorithms

Caltech Experiments -Performance Evaluation
Tsf, Dsf: Time (first robot), Distance (sum of all robots) to find source
Tmin, Dmin: Optimum time and distance given environment
α,β: Weighting parameters

Caltech Experiments – Sample ResultsCaltech Experiments Sample ResultsReal Robots Quantitative performance
Collaborative (localCollaborative (local attraction/repulsion) spiral-surge algorithm
• High is better• Dashed Webots, continuous real

Caltech Experiments - Sample ResultsCaltech Experiments Sample Results
• 25 x bigger arena, same
0.075
0.08
0.085
in)
w/ s
tder
r AttractNone Kill
gg ,plume
• realistically simulated
0.055
0.06
0.065
0.07
/(T
x/T
min
+D
x/D
min
)
robots (Webots)• 1000 runs
0.04
0.045
0.05
0.055
Per
form
ance
: 2/(
T
• Different collaboration strategies (Kill and Attract)
1 2 3 4 5 6 7 8 9 100.035
Group Size
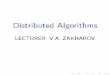
P
Optimal team size > 1: plume finding phase (parallel search p p g p (ppay off) dominate overall performance!Kill: parallel plume finding, single robot plume traversing!

)
1 robot1 robot
wer
is b
ette
r)
N robotsN robots
N runs with 1 robotN runs with 1 roboterhe
ad (l
ow
With CollaborationWith Collaborationunpublishedunpublished
Dis
tanc
e ov
eD
Distance overhead = Dsf/Dmin normalized for single robot

)w
er is
bet
ter)
1 robot1 robot
erhe
ad (l
ow
N robotsN robots
Dis
tanc
e ov
e
With CollaborationWith Collaborationunpublishedunpublished
N runs with 1 robotN runs with 1 robotD
pp

With CollaborationWith Collaborationunpublishedunpublished
Improve? Redesign?

Crosswind formation
Improve? Redesigned solution!
[Lochmatter et al, DARS 2010, to appear]


Conclusion

Take Home MessagesTake Home Messages• Distributed coverage and search are two main classes of
bl f b i kproblems for robotic sensor networks• The advantages of robotic sensor networks vs. traditional
WSN are their flexibility in deployment, gathering andWSN are their flexibility in deployment, gathering and reconfiguration
• Their drawbacks are additional complexity at the node level and increased power consumptionlevel and increased power consumption
• Networking plays a crucial role both from an inter-robot coordination perspective as well as gathering data at the p p g guser interface
• Target localization (odor source, chemical spill, sound source etc ) and inspection (visual auditory tactile etc )source, etc.) and inspection (visual, auditory, tactile, etc.) are concrete applications for robotic sensor networks

Additional Literature – Week 10• Rutishauser S., Correll N., and Martinoli A., “Collaborative Coverage using a
Swarm of Networked Miniature Robots”. Robotics and Autonomous Systems, 57(5): 517 525 200957(5): 517-525, 2009.
• Correll N. and Martinoli A., “Multi-Robot Inspection of Industrial Machinery: From Distributed Coverage Algorithms to Experiments with Miniature Robotic Swarms”. IEEE Robotics and Automation Magazine, 16(1): 103-112, 2009. g , ( ) ,
• Amstutz P., Correll N., and Martinoli A., “Distributed Boundary Coverage with a Team of Networked Miniature Robots using a Robust Market-Based Algorithm”. Special Issue on Multi-Robot Coverage, Search, and Exploration, Kaminka G. A.
d Sh i A di A l f M h d A f l I ll 52(2 4)and Shapiro A., editors, Annals of Mathematics and Artificial Intelligence, 52(2-4): 307-333, 2009.
• Hayes A. T., Martinoli A., and Goodman R. M., “Distributed Odor Source Localization” Special Issue on Artificial Olfaction Nagle H T Gardner J WLocalization . Special Issue on Artificial Olfaction, Nagle H. T., Gardner J. W., and Persaud K., editors, IEEE Sensors Journal, 2(3): 260-271, 2002.
• Hayes A. T., Martinoli A., and Goodman R. M., “Swarm Robotic Odor Localization: Off-Line Optimization and Validation with Real Robots”. Special issue on Biological Robotics, McFarland D., editor, Robotica, 21(4): 427-441, 2003.

Additional Literature – Week 10Additional Literature Week 10• Lochmatter T., Raemy X., Matthey L., Indra S. and Martinoli A., “A
Comparison of Casting and Spiraling Algorithms for Odor Source Localization i i l ” f h 2008 C f b din Laminar Flow”. Proc. of the 2008 IEEE Int. Conf. on Robotics and Automation, May 2008, Pasadena, U.S.A., pp. 1138 – 1143.
• Lochmatter T. and Martinoli A., “Theoretical Analysis of Three Bio-Inspired Plume Tracking Algorithms” Proc of the 2009 IEEE Int Conf on RoboticsPlume Tracking Algorithms . Proc. of the 2009 IEEE Int. Conf. on Robotics and Automation, May 2009, Kobe, Japan, pp. 2661-2668.
• Lochmatter T. and Martinoli A., “Understanding the Potential Impact of Multiple Robots in Odor Source Localization”. Proc. of the Ninth Int. Symp. on Distributed Autonomous Robotic Systems, November 2008, Tsukuba, Ibaraki, Japan; Distributed Autonomous Robotic Systems 8 (2009), pp. 239-250. L h tt T A di E N I d M ti li A “A Pl T ki• Lochmatter T., Aydin E., Navarro I. and Martinoli A., “A Plume Tracking Algorithm based on Crosswind Formations”. Proc. of the Tenth Int. Symp. on Distributed Autonomous Robotic Systems, November 2010, Lausanne, Switzerland. To appear. pp