Embed Size (px)
Citation preview
![Page 1: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/1.jpg)
Distributed Intelligent Systems – W13:Self-Aggregation and Self-Assembly in Natural and
Artificial Systems
1
![Page 2: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/2.jpg)
Outline• Self-aggregation in artificial
systems• Collective decisions mediated
by self-aggregation (mixed societies)
• Self-assembly – General background– Examples
2
![Page 3: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/3.jpg)
Self-Aggregation in Artificial Systems
3
![Page 4: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/4.jpg)
Robot Self-Aggregation using Wireless Communication - Overview
[Correll & Martinoli, IJRR 2011]
• Eg. 2 clusters of 3 robots, 6 of 1 robot• Webots experiments using Alice II with
radio, 12 robots total• Arena diameter: 1 m• Communication range: 7-12 cm• Simplified com model
Real robotic node: Alice II with 802.15.4 com module
4
![Page 5: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/5.jpg)
Original Inspiration: Aggregation in Gregarious Arthropods
• Aggregation in Cockroaches• Individual Behavior is well
studied• Probability to rest is a
function of the number of cockroaches nearby
• Probability to move decreases when in larger aggregates
© Sempo, Halloy, Detrain & Deneubourg
5
![Page 6: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/6.jpg)
Individual Behavioral Parameters
Data collected by Jeanson et al. (Animal Behavior 2004)
pjoin pleave
# of cockroaches nearby
6
![Page 7: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/7.jpg)
Experimental Setup• Submicroscopic model (Webots)• Estimate of neighborhood using local
communication used as an “omnidirectional teammate sensor”
• Local communication: – presence or absence of a teammate in the
communication range– use of static or from a large set dynamically
randomly chosen IDs for facilitation of the discrimination
– no additional explicit information shared (e.g., counting process involving multi-hop, etc.)
• Objective: relation between individual and collective dynamics rather than biological accuracy
• Systematic experiments (thousands of runs) infeasible with biological agents
7
![Page 8: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/8.jpg)
Individual Robot Behavior
Search Rest
pjoin(Environment)
pleave(Environment)
Note: avoidance behavior for walls implemented but neither represented here nor captured by the models (impact negligible) 8
![Page 9: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/9.jpg)
Microscopic and Macroscopic Modeling
9
![Page 10: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/10.jpg)
Assumptions• A robot moves through the environment
(random walk) during which it encounters other robots with constant probability
• The probability to encounter one robot is pc, the probability to encounter and join a cluster of n robots pjoin(n) ; the probability of leaving such cluster pleave(n)
Uniform distribution of objects in the environment and linear super-position of encountering probabilities
10
![Page 11: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/11.jpg)
Probabilistic Finite State Machinefor an Individual Robot
pc = probability per time step to encounter another robotNx = fraction of time spent in state x
Robot joining/leaving aggregates
“Passive” state transitions
11
![Page 12: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/12.jpg)
“Passive” State Transitions
Example: 4 robots change their state without actually moving
j j+1
12
![Page 13: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/13.jpg)
Probabilistic Finite State Machine for the Whole System
Ns= average number of robots in searchNj= average number of robots in an aggregate of size j 13
![Page 14: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/14.jpg)
Probabilistic Finite State Machine
14
![Page 15: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/15.jpg)
Number of Agents in a j-size Cluster
• Flows from a single aggregate
j-Aggregate
jpleave(j)
jpcpjoin(j)
jpleave(j+1)
jpcpjoin(j-1)
15
![Page 16: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/16.jpg)
Average Number of Agents in a j-size Cluster
j-Aggregate
Nj(k)jpleave(j)
Ns(k)Nj(k)jpcpjoin(j)
Nj+1(k)jpleave(j+1)
Ns(k)Nj-1(k) jpcpjoin(j-1)
16
![Page 17: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/17.jpg)
Sample Results and Discussion
17
![Page 18: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/18.jpg)
Temporal Evolution of the Self-Aggregation Process (12 robots)
Submicroscopic model (Webots)• 1500 runs• 3 h (10800 s) per run • sample time 10 s•10 cm communication range
Macroscopic model
18
![Page 19: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/19.jpg)
Temporal evolution of the Self-Aggregation Process (1 run)
19
![Page 20: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/20.jpg)
Modulating the Encountering Probability by the Communication Range (12 robots)
• 7cm communication range
• 1500 runs• 12 cm communication range
• 1500 runs 20
![Page 21: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/21.jpg)
Discussion
• The “encountering probability” is indeed a function of the communication range, which leads to a bifurcation of the system dynamics (scattered vs. giant component)
• Aggregation performance of the biological algorithm very low
• Might be the sole choice for micro-robots
21
![Page 22: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/22.jpg)
Discussion
• Modeling limitations:– Clusters are assumed to be circular– Only one individual joins/leaves at a time– Clusters do not split/merge
• Function of robot shape/sensorial characteristics
22
![Page 23: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/23.jpg)
Self-Aggregation in Mixed Natural-Artificial Systems
23
![Page 24: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/24.jpg)
• Leurre: European project focusing on mixed insect-robot societies (http://leurre.ulb.ac.be)
• Relevant Leurre partners for the presented work:
• ULB (coordinator, modeling, experimental work with insects/robots)
• Uni Rennes/CNRS (chemistry)• EPFL – ASL/LSRO (mobile robots design
and development)• EPFL – DISAL (vision-based tracking and
modelling)
The LEURRE Project
24
![Page 25: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/25.jpg)
[Halloy et al., Science, Nov. 2007]
Collectively Selecting a ShelterGoal of the project: quantitatively characterize the self-organized collective decision-making process of a cockroach society by unravelling and influencing the local interaction rules
• A simple decision-making scenario: 1 arena, 2 shelters
• Shelters of the same and different darkness
• Groups of pure cockroaches (16), mixed robot+cockroaches (12+4)
• Infiltration using chemical camouflage and statistical behavioral model 25
![Page 26: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/26.jpg)
Sample ResultsLegend: mixed, pure; shelter 1, shelter 2
A . Symmetric shelters (infiltration) B. Asymmetric shelters (active control)
Macroscopic Model
Experiment
Experiment
26
![Page 27: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/27.jpg)
The EPFL Tool Contributions3. Multi-level modeling
Ss Sa
1
1
( 1) ( ) ( ) ( 1) ( ) ( ) ( )
( ) ( ) ( 1) ( )
join joinj j r s j j
leave leavej j
N k N k p N k j p j N k p j N k
p j N k j p j N k j
Module-based microscopic model
Agent-based microscopic model
Macroscopic model
[Mermoud et al., Handbook of Collective Robotics, 2013]
Ss SaSs Sa
Target system
1. Robots as a flexible, interactive, societal “microscope”
[Asadpour et al., ARS J., 2006]
2. A marker-less vision-based tracking tool: SwisTrack
[Correll et al., IROS 2006, Lochmatter et al., IROS 2008]; http://sourceforge.net/projects/swistrack 27
![Page 28: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/28.jpg)
Self-Assembly in Natural and Artificial Systems
28
![Page 29: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/29.jpg)
What is Self-Assembly?Spontaneous organization of pre-existing units
into spatial structures or patterns without external guidance.
Our galaxy, the Milky Way, about 1021 m
Carbon nanotube, about 10-8 m
29 orders of magnitude, same underlying
mechanism!
Self-Assembly at All Scales
29
![Page 30: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/30.jpg)
What is NOT Self-Assembly?
Gazprom building, St-Petersburg, 102 m
Planned and externally guided constructions
Living beings, because they are not made of
pre-existing unitsUnstructured aggregates
Boxelder bug aggregate, 10-3 m
Various animals
Sequential, limited scalability (from a few millimeters up to a few
kilometers)
Aggregation may serve a purpose (e.g., protection,
collective decision-making), but the structure
itself does not.
Self-assembly may have played a key role in the
initial appearance of life.
30
![Page 31: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/31.jpg)
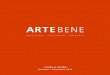
A.Crystal structure of a ribosome [Yusupov et al., 2001]
B.Scaffolded DNA origami of 100 nm in diameter [Rothemund, Caltech]
C.Capillary SA of 10-μm-sized hexagonal plates into large crystal structures [Whitesides, Harvard]
Self-Assembly at All Scales
D. SA of 1-mm-sized hexagonal plates using “capillary bond” [Whitesides, Harvard]
E. SA of electrical networks [Whitesides, Harvard]
F. Electromechanical programmable parts specifically designed for SA [Klavins, University of Washington]
G. A swarm of mobile robots capable of SA [Dorigo, Université Libre de Bruxelles]
31
![Page 32: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/32.jpg)
Ingredients of Self-Assembly:1. Positive feedback: binding force, structural reinforcement2. Negative feedback: repulsive force (otherwise, merely
aggregation)3. Multiple reversible interactions4. Randomness
Features of Self-Assembly: Robustness: self-assembly deals with component defects,
environmental noise and external perturbations Parallelism: self-assembly occurs wherever there are interacting
components Scalability: self-assembly is a strategy applicable at all scales,
and even across scales Ubiquity: structures form spontaneously at all scales in Nature,
and most of them exhibit similarities across scales
Ingredients and Features
32
![Page 33: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/33.jpg)
Motivation for Studying Self-Assembly (1)Scientific understanding of a broad variety of
phenomena:
Water ripples~10-3 m
Seashell~10-2 m
School of fish~101m
DNA origami~10-7m
Tornado~102 m
Cyclone~106 m
33
![Page 34: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/34.jpg)
Motivation for Studying Self-Assembly (2)
Left: A microrobot (10 μm) is inoculating a red blood cellagainst some kind of disease. Right: This nanoscaled device (1 nm) enables a nanorobot to catch HIV individuals and destroy them.
Manufacturing and coordination of ultra-small distributed intelligent systems:
34
![Page 35: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/35.jpg)
The quest for miniaturizationHow to go from the Alice robot (2cm in size)…
...to fully-fledged microrobots?35
![Page 36: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/36.jpg)
Limitations of the Top-Down Approach
HOW TO ASSEMBLE
INTO THESE USING THESE?THESE
ANSWER: LET THEM ASSEMBLE THEMSELVES!36
![Page 37: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/37.jpg)
Binding surfaceNon-binding surface
Self-Assembly Hydrophobic interaction and
capillary forces (in fluid)
Van der Waals forces (in dry state)
Experimental challenges: imaging (3D, high speed camera, microscope) and controllability
Self-Assembly of Micro-Systems
37
![Page 38: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/38.jpg)
Intelligent… and less intelligent agents
Typical size: 2 centimeters Typical swarm size:< 100 units Sensing, computation,
communication (only local)Controllable self-locomoted
units (but quite noisy)
Typical size: 50 to 500 μm Typical swarm size:> 104 unitsNo sensing, computation or
communication, but local interactions only Stochastic motion only
Alice mobile robot MEMS
100µm2cm
38
![Page 39: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/39.jpg)
Multi-Level Modeling Methodology
Physical reality: real experiments, imaging with overhead cameras, tracking software
Microscopic 1: Monte Carlo model, 1 robot = 1 agent, non-spatial
Abs
trac
tion
Exp
erim
enta
l tim
e
Com
mon
met
rics
Microscopic 2: Agent-Based model, 1 robot = 1 agent, spatial
Realistic: faithful representation of the robots (e.g., geometry, S&A) and the environment (e.g., friction, gravity, inertia)
Macroscopic 2: Chemical Reaction Network, stochastic simulations
Macroscopic 1: rate equations, mean field approach, whole population
39
![Page 40: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/40.jpg)
Multi-Level Modeling
Abs
trac
tion
Exp
erim
enta
l tim
e
Com
mon
met
rics
Microscopic (spatial): Agent-Based model, 1 particle = 1 agent
Macro-stochastic: Chemical Reaction Network, stochastic simulations
Macro-deterministic: rate equations, mean field approach, whole population
Microscopic (non-spatial): Monte Carlo model, 1 particle = 1 agent
Underlying physical platforms and submicroscopic models may
vary dramatically.
AUTOMATION
40
![Page 41: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/41.jpg)
Alice Self-Assembly
10 runs452 species
1474 reactions
Real System (tracking)
M3 Framework
✗
[Mermoud, PhD EPFL 2012, STAR Volume Nr. 93] 41
![Page 42: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/42.jpg)
40 runs6 species
12 reactions
Self-Assembly of Passive Lilies
[Di Mario et al., IROS 2011][Mermoud, PhD EPFL 2012]
42
mean
1.96·σ
![Page 43: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/43.jpg)
Automated Model-Based Design
Modeling
Model-basedDesign & Optimization
AUTOMATION
[Mermoud et al, ICRA 2012] 43
![Page 44: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/44.jpg)
Model-Based Control of Self-Assembly Case study with four real Lily modules Two modes of agitation (bang-bang):
1. High agitation (exploration)2. Low agitation (exploitation)
Simultaneous modeling & optimizationapproach
Completely automated and real-time
Target 44
![Page 45: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/45.jpg)
Qualitative Results
45
![Page 46: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/46.jpg)
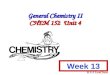
Quantitative results
40 runs of 30 minutes using 4 real Lily modules
(low) (high)
Tim
e to
reac
h ta
rget
stru
ctur
e [s
]
46
![Page 47: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/47.jpg)
Conclusion
47
![Page 48: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/48.jpg)
Take Home Messages• Self-aggregation can be modeled with the usual multi-level
modeling techniques; the resulting models at the macroscopic level are very similar to those of object aggregation
• Self-aggregation can facilitate collective decisions, especially in systems endowed with low-range communication
• Self-assembly implies the constitution of structures and ordered spatial pattern (rather than just aggregate) and constituting elements that incorporate all the required assembly mechanisms (although they are not necessarily endowed with self-locomotion capabilities)
• Self-assembly can happen at all scales and is a powerful, parallel, potentially cheap coordination principle for a number of manufacturing applications in which traditional techniques cannot be used or have an excessive cost
48
![Page 49: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/49.jpg)
Additional Literature – Week 13Papers• S. Garnier, C. Jost, R. Jeanson, J. Gautrais, A. Grimal, M. Asadpour, G. Caprari, and G. Theraulaz. “The
Embodiment of Cockroach Aggregation Behavior in a Group of Micro-Robots”. Artificial Life, 14: 387-408, 2008.
• R. Gross, M. Bonani, F. Mondada, and M. Dorigo. Autonomous self-assembly in swarm-bots. IEEE Trans. on Robotics, 22(6):1115–1130, 2006.
• Gross R. and Dorigo M. "Self-assembly at the macroscopic scale," Proceedings of the IEEE, 96(9):1490-1508, 2008
• Goldowsky J., Mastrangeli M., Jacot-Descombes L., Gullo M. R., Mermoud G., Brugger J., Martinoli A., Nelson B. J., Knapp H. F., “Acousto-Fluidic System Assisting In-Liquid Self-Assembly of Microcomponents”. Journal of Micromechanics and Microengineering, 23: 125026 (11pp), 2013.
• Jacot-Descombes L., Martin-Olmos C., Gullo M. R., Cadarso V. J., Mermoud G., Villanueva L. G., Mastrangeli M., Martinoli A., and Brugger J., “Fluid-Mediated Parallel Self-Assembly of Polymeric Micro-Capsules for Liquid Encapsulation and Release”. Soft Matter, 9: 9931-9938, 2013.
• Mastrangeli M., Mermoud G., and Martinoli A., “Modeling Self-Assembly Across Scales: The Unifying Perspective of Smart Minimal Particles”. Special issue on Self-Assembly, Böhringer K. F. and Elwenspoek M. editors, Micromachines, 2(2): 82-115, 2011.
• Klavins E., “Programmable self-assembly”. Control Systems, 27(4):43–56,2007.• Mastrangeli M., Schill F., Goldowsky J., Knapp H., Brugger J., Martinoli A., “Automated Real-Time
Control of Fluidic Self-Assembly of Microparticles”. Proc. of the 2014 IEEE Int. Conf. on Robotics and Automation, May-June 2014, Hong Kong, China, pp. 5860-5865.
• Mastrangeli M., Martinoli A., and Brugger J., “Three-Dimensional Polymeric Microtiles for Optically-Tracked Fluidic Self-Assembly”, Microelectronic Engineering, 124: 1–7, 2014.
• Rubenstein M., Cornejo A., and Nagpal R., “Programmable Self-Assembly in a Thousand-Robot Swarm”. Science 345 (6198): 795-799, 2014. 49
![Page 50: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/50.jpg)
Course Conclusion
50
![Page 51: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/51.jpg)
Take Home Messages
• Distributed Intelligent Systems (DISs) show natural and artificial (virtual or real) forms
• Artificial and natural DISs differ quite a bit in their physical substrate and algorithms/design solutions proposed for natural systems can often be applied in a straightforward way in virtual scenarios but with more care in the real world
• Various classes of algorithms, model-based and data-driven (machine-learning) methods have been presented in the course for the coordination, analysis and synthesis of DISs
51
![Page 52: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/52.jpg)
Take Home Messages• Local interaction mechanisms ensure system scalability;
individual simplicity often implies additional robustness at the cost of a reduced efficiency
• Self-organization is a key, scalable coordination mechanism based on local interactions
• Self-assembly is a form of self-organization focusing on spatial patterns
• Swarm Intelligence is one form of distributed intelligence relying on self-organization as coordination mechanism; it often also leverages stigmergy as indirect communication mechanism; it targets systems consisting of a large number of simple units
52
![Page 53: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/53.jpg)
Take Home Messages• Further local capabilities (e.g., additional computation
resources, explicit communication, and localization) can be used to enhance the collective performance
• Further coordination mechanisms exploiting longer range, explicit communication, and points of centralization can be competitive at the cost of a higher node complexity or reduced mobility
• Volume/mass/cost of single nodes determine available energy, S&A accuracy, communication, computation, and mobility capabilities, etc. and software/hardware choices must be well matched to obtain competitive systems
53
![Page 54: Distributed Intelligent Systems – W13: Self-Aggregation ... · [Halloy et al., Science, Nov. 2007] Collectively Selecting a Shelter Goal of the project: quantitatively characterize](https://reader043.pdfslide.us/reader043/viewer/2022041214/5e031aa6d9e2ea2f2041c6cf/html5/page/54.jpg)
The end:Thanks for your attention
over the whole course!
54