Embed Size (px)
Citation preview

Distributed coordination in multi-agent systems under local directedinteractions: avoidance and aggregation
Dimitra Panagou
Abstract— This paper proposes a velocity coordination pro-tocol for the control of multiple nonholonomic agents, whichaims to address two distinct scenarios in a unified manner.The former case is aggregation of multiple agents around agoal location, while the latter case is navigation of multipleagents to multiple goal locations along with collision avoidance.The proposed protocol imposes directed interactions amongagents in the following sense: Each agent i makes a decisionon its control inputs by choosing and interacting with a subsetof its neighbor agents j only. The proposed decision makingprocess is based on semi-cooperative coordination, which canbe thought as an implicit prioritization among locally connectedagents, and which results in a suitable adjustment of the linearvelocities of the connected agents. The angular velocities ofthe agents are regulated to reference directions which aredictated by a family of vector fields introduced in earlier workof the author’s. Simulation results involving multiple unicycleagents achieving either aggregation or navigation towardsgoal locations along with collision avoidance are provided todemonstrate the efficacy of the proposed algorithm.
I. INTRODUCTION
Multi-Agent Systems have been a very popular researchtopic during the past fifteen years, motivated in part byapplications which range from robotics and multi-robot sys-tems, to networked control systems, to power systems andsensor networks, to name a few. A common ground withinthe diversity of the aforementioned applications can be thecollaboration of multiple agents towards achieving commontasks and goals. Research efforts have now attributed variousformulations and methodologies on multi-agent problems,which are often specialized based on the control objectivesand the characteristics of the problems at hand. It is out ofthe scope of this paper to provide a detailed overview ofthe related results. Very briefly, special emphasis during thepast ten years has been given in consensus problems (alsocalled synchronization, rendezvous or agreement), flockingand formation control problems for multiple agents, see [1]for a recent survey.
When it comes to planning and coordination of the motionof multiple vehicles, such as autonomous cars or unmannedaerial vehicles, then navigating towards goal locations whileavoiding collisions is a requirement of highest priority, seefor instance [2], [3] and the references therein. In a not-that-different spirit, applications which are relevant to reconfig-urable and modular robotics [4], automated self-organization,construction and transportation [5]–[7], or patrolling andprotection, typically involve multiple agents (robots or au-tonomous vehicles) which need to come together, interact,
The author is with the Aerospace Engineering Department, University ofMichigan, Ann Arbor, MI, USA [email protected]
and form various shapes in their workspace, creating thusa structure of augmented or improved capabilities. Theseproblems are often characterized as aggregation or swarmingbehavior in multi-agent systems [8]–[13].
At the same time, limitations in the available sensingand communication platforms impose additional constraintsto the multi-agent system. Given a pair (i, j) of agentsi and j, agents typically make decisions on their actionsbased on available information, which can be either locallymeasured by each agent using onboard sensors, or trans-mitted and received across the nodes of the multi-agentsystem via wireless communication links. Thus, informa-tion flow between two agents can be either bidirectional(undirected) or unidirectional (directed). During the past tenyears, research efforts have achieved the formalization ofproblems such as consensus and formation control in multi-agent networks using tools and notions from graph theory,matrix theory and Lyapunov stability theory [14]–[17]. Thecase of directed information exchange has recently attractedincreased interest [18]–[22], motivated in part by the factthat undirected information flow is not always a realisticand practical assumption, due to bandwidth limitations inthe network, anisotropic sensing of the agents etc. Extendingconsensus algorithms to nonlinear systems has also becomepopular, see for instance [23], [24].
Nevertheless, despite that consensus, flocking, and forma-tion control algorithms achieve collision avoidance in multi-vehicle systems by carefully selecting initial conditions andcontrolling relative distance and heading, they are typicallynot used in encoding problems such as navigation to specificgoal locations for each one of the agents. In that respect,we are developing coordination algorithms for the motion ofmultiple agents along with safety guarantees. We considera group of multiple nonholonomic agents with unicyclekinematics, and while keeping a unified view, we proposea coordination protocol for two different coordination prob-lems: namely (i) aggregation of multiple agents around a goallocation and (ii) navigation of multiple agents to multiplegoal locations.
While the problem of coordinating the motion of multiplerobots towards a single (for aggregation) or multiple (fornavigation) goal locations is not new, here we consider aunified view of these two problems, and furthermore weconsider directed interactions among agents. By directedinteraction we mean that each agent i makes a decisionon its control actions by interacting with a subset of itsneighbor agents j 6= i. The decision is interpreted as thatpairwise collision avoidance is achieved by at least one of

the involved agents i, j. The control action of agent i isdetermined using information on the states of all its neighboragents j, and results in collision-free trajectories for agenti with respect to (w.r.t.) the worst case neighbor agent j,i.e., w.r.t. the neighbor agent j which is more susceptible tocollision. Thus, the information flow for implementing ourprotocol is varying with time, in the sense that interactionsare local, and the decision making on the control action ofeach agent i is directed towards a subset of the neighboragents j 6= i.
Our goal is not to just provide a new coordinationmethodology for multiple nonholonomic agents, but ratherto highlight that the same coordination protocol for theagents’ linear velocities, along with slight modificationson the coordination of their angular velocities, achievesdistinct collective behaviors: the former case is aggregationof multiple agents around a goal location, while the latterone is navigation of multiple agents towards multiple goallocations, along with collision avoidance. The primary mo-tivation on studying these tasks relies on planning problemsfor complex control systems, such as those encountered inaerial and modular robotics.
The paper is organized as follows: Sections II and IIIpresent the mathematical formulation and the proposed coor-dination protocol, along with the analysis on the correctnessand the fulfillment of the associated control objectives, re-spectively. Section IV provides simulation results for a groupof unicycle robots which perform aggregation around, andnavigation to, goal locations, along with collision avoidance.Our conclusions and thoughts on future work are summarizedin Section V.
II. MULTI-AGENT COORDINATION VIA VECTOR FIELDS
We consider a group of N agents with unicycle kinemat-ics. The motion of the i-th agent, i ∈ 1, . . . , N, is governedby the equations:xiyi
θi
=
cos θi 0sin θi 0
0 1
[uiωi
], (1)
where qi =[xi yi θi
]Tis the state vector comprising
the position ri =[xi yi
]Tand the orientation θi of agent
i w.r.t. a global cartesian coordinate frame G, ui is the linearvelocity and ωi is the angular velocity of agent i w.r.t. thebody-fixed frame Bi. We assume that each agent i:
(i) is a circular disk of radius ρi centered at ri,(ii) has access to its state qi and velocities ui, ωi,
(iii) can reliably exchange information with any agent j 6= iwhich lies within its communication region
Ci : ri ∈ R2, rj ∈ R2 | ‖ri − rj‖ ≤ Rc,
where Rc is the communication range. In other words, apair of agents (i, j) is connected as long as the distancedij = ‖ri − rj‖ ≤ Rc.
A. A family of vector fields for robot navigation
In our earlier work [25] we defined a class of vector fieldsFi : R2 → R2 for each agent i as:
Fi =
N∏j=1,j 6=i
(1− σij) Fgi +
N∑j=1,j 6=i
σij Fioj , (2)
where:
Fgix =(x− xgi)2 − (y − ygi)2
(x− xgi)2 + (y − ygi)2, (3a)
Fgiy =2(x− xgi)(y − ygi)
(x− xgi)2 + (y − ygi)2, (3b)
are the vector field components of a (normalized) attractivevector field Fgi : R2 → R2, which is by constructionvanishing at the goal location rgi only,Fioj is a normalized repulsive vector field around each eachagent j 6= i, which will be defined later on, and σij is abump function defined as:
σij =
1, for dm ≤ dij ≤ dr;a dij
3 + b dij2 + c dij + d, for dr < dij < dc;
0, for dij ≥ dc;(4)
where: dij = ‖ri − rj‖ the Euclidean distance betweenagents i, j, the physical meaning of the values dm, dr, dcis to be highlighted later on, and the coefficients a, b, c, dcomputed as:
a = − 2
(dr − dc)3, b =
3(dr + dc)
(dr − dc)3,
c = − 6 drdc(dr − dc)3
, d =dc
2(3dc − dr)(dr − dc)3
,
so that (4) is a C2 function.The vector field (2), for the repulsive vector field Fioj
around each agent j 6= i defined as:
Fioj =
Fioj|A , for pijTrji ≥ 0;
Fioj|B , for pijTrji < 0,(5)
where: pij =[cosφij sinφij
]T, rji = ri − rj , φij =
atan2 ((yj − ygi), (xj − xgi)),
Fioj|A =
[sinφij(xi − xj)(yi − yj)− cosφij(yi − yj)2cosφij(xi − xj)(yi − yj)− sinφij(xi − xj)2
],
Fioj|B =
[− cosφij(xi − xj)2 − cosφij(yi − yj)2− sinφij(xi − xj)2 − sinφij(yi − yj)2
]is shown [25] under certain, mild assumptions to be a safe,almost global feedback motion plan for agent i operating inan idealistic environment, where each other agent j 6= i isstatic and serves as a circular obstacle.
Mild assumptions refer to ensuring that the repulsive flowsaround each pair of agents j 6= i do not overlap, which isachieved if the minimum distance dm in (4) is defined asdm = 2(2ρ + ρε), or equivalently, as having the clearancebetween any pair of static agents greater than 2(ρ+ρε), whereρε is the minimum allowable clearance between any pair of

agents, and ρ is the radius of the agents. This is physicallyinterpreted as ensuring that the clearance between any pairof agents i, j is sufficiently large so that another agent kcan safely navigate among them. For more details on thegeometric construction, the reader is referred to [25].
Almost global means that the resulting integral curves of(2) converge to the goal location rgi, except for a set ofinitial conditions of measure zero; if agent i initiates on thisset, then it converges to undesired singular points of (2).This result is naturally expected, yet it is noteworthy thatthe resulting safety and convergence properties are renderedwithout any parameter tuning, as often done in relevantArtificial Potential Fields (APF) methods.
Having said that, the scope of this paper is not to just pro-vide a vector field based planning and coordination method-ology, but rather to highlight that complex coordination taskswith multiple agents can be achieved by using appropriateforms of the vector field (2), and more specifically, bysuitably choosing the form of the repulsive flow (5).
III. A DISTRIBUTED COORDINATION PROTOCOL BASEDON DIRECTED INTERACTIONS
We are interested in designing a palette of control strate-gies which achieve semi-cooperative coordination and con-trol objectives such as: aggregation of multiple agents w.r.t. agoal location, and navigation of multiple agents towards goallocations along collision-free trajectories. We propose andstudy the correctness of the following coordination protocol.
Proposition 1: Recall that each agent has a circular com-munication region of radius Rc centered at ri =
[xi yi
]T,
and is assigned a goal location rgi. Assume that:• the linear velocity ui of each agent i evolves under the
control strategy:
ui =
max
0, minj∈Ni|Ij<0
ui|j
, dm ≤ dij ≤ Rc,
uic, Rc < dij ;,
(6)
where: ui|j is the safe velocity of agent i w.r.t. an agentj lying in the communication region of Ci of agent i,given as:
ui|j = uicdij − dmRc − dm
+ uis|jRc − dijRc − dm
, (7)
with the terms in (7) defined as:
uic = ki tanh(‖ri − rgi‖), uis|j = ujrji
TηjrjiTηi
,
ηi =
[cosφisinφi
], Ij = rji
Tηi, rji = ri − rj ,
φi = arctan (Fiy,Fix) , with Fix,Fiy taken out of (2),dm = 2(2ρ+ ρε), dm < dr < dc ≤ Rc,
where the term j ∈ Ni | Ij < 0 denotes the setof neighbor agents j of agent i for which the term Ijdefined above is negative,
• the angular velocity ωi of agent i evolves under thecontrol strategy:
ωi = −λi (θi − φi) + φi, (8)
where λi > 0, and φi = arctan (Fiy,Fix), withFix,Fiy taken out of (2).
Define the attractive flow Fgi for each agent i in (2) as in(3). Then the group of agents:
1) aggregates in the region of goal locations if the repulsiveflows for each agent i in (2) are defined as in (5),
2) navigates along collision-free trajectories and each agentconverges to its assigned goal location if the repulsiveflows for each agent i in (2) are defined as:
Fixoj =xi − xj√
(xi − xj)2 + (yi − yj)2, (9a)
Fiyoj =yi − yj√
(xi − xj)2 + (yi − yj)2. (9b)
Proof: It is straightforward to verify that under theangular velocity control law (8) the orientation θi of agent iis globally exponentially stable to the orientation φi of thevector field (2). The distribution of goal locations implies thatat least a pair (i, j) of agents i, j will be at conflict at sometime t. Consider agent i, and the set of its neighbor agents Nidefined as the set of agents j 6= i lying in its communicationregion Ci. The proposed algorithm forces each agent i toconsider the subset of its neighbor agents j ∈ Ni towardswhom agent i is moving – i.e., not all its neighbor agents,but rather only those towards whom agent i is susceptible tocollision.
To see why we resort to this choice, consider the timederivative of the collision avoidance constraint
cij = (xi − xj)2 + (yi − yj)2 − dm2 ≥ 0
evaluated at the reference angles φi, φj of the vector field(2) for agent i and j, respectively, which reads:
d
dtcij = 2ui rji
T
[cosφisinφi
]︸ ︷︷ ︸
I
−2uj rjiT
[cosφjsinφj
]︸ ︷︷ ︸
J
, (10)
where rji , ri − rj and the velocities ui, uj are positiveby construction (this is justified later on). Denote ηi ,[cosφi sinφi
]T, ηj ,
[cosφj sinφj
]T. To proceed with
the analysis, let us first provide the following definitions:Definition 1: Assume that rjiTηi ≥ 0 and rjiTηj ≤ 0:
Then I ≥ 0 and J ≥ 0, which implies that both agents i,j contribute in satisfying the collision avoidance condition.We say that collision avoidance is “fully cooperative.”
Definition 2: Assume that rjiTηi ≥ 0 and rjiTηi ≥ 0:Then I ≥ 0 and J ≤ 0, which implies that agent i contributestowards avoiding collision, whereas agent j does not. If I +J ≥ 0, we say that collision avoidance is “semi-cooperativeby agent i”; otherwise, “collision” occurs.
Definition 3: Assume that rjiTηi ≤ 0 and rjiTηj ≤ 0:Then I ≤ 0 and J ≥ 0, which implies that agent jcontributes towards avoiding collision, whereas agent i does

not. If I + J ≥ 0, we say that collision avoidance is “semi-cooperative by agent j”; otherwise, “collision” occurs.
Definition 4: Assume that rjiTηi ≤ 0 and rjiTηj ≥ 0:Then I ≤ 0 and J ≤ 0, which implies that “collision”occurs.
Let us now consider the following cases:• I ≥ 0: This physically means that agent i moves away
from or maintains fixed distance w.r.t., agent j. Collisionavoidance may then be either “fully cooperative” or“semi-cooperative by agent i”, depending on the effectof agent j in (10) via the term J . Collision occurs ifand only if J is negative enough to render the condition(10) negative. We let agent i move with positive linearvelocity:
uic = ki tanh(‖ri − rgi‖). (11)
The case of agent j moving so that I+J < 0 is excludedthrough the coordination imposed below.
• I < 0: This physically means that agent i movestowards agent j. Collision is avoided if and only ifthe term J renders the condition (10) positive, i.e.,avoiding collision is, at best, “semi-cooperative by agentj.” Nevertheless, agent i ignores the intentions of agentj. Thus, a way to ensure that I + J ≥ 0 is to haveagent i suitably adjust its linear velocity ui. To thisend we assume that agent i communicates with agentj, acquires its linear velocity uj and orientation φj , andmoves according to:
ui|j = uicdij − dmRc − dm
+ uis|jRc − dijRc − dm
, (12)
where:
uis|j ≤ ujrji
TηjrjiTηi
(13)
is the safe (i.e., collision avoiding) velocity for agent iw.r.t. agent j dictated by the condition (10), and dij isthe distance between i and j. A straightforward option isto set uis|j satisfying the equality in (13). The velocityprofile ui|j in (12) is depicted in Fig. 1.
Fig. 1. If rjiTηi < 0, i.e., if agent i moves towards agent j, then agenti adjusts its linear velocity according to the velocity profile shown here,given analytically by (12).
Under this choice, it is easy to verify that:1) If rjiTηj > 0, i.e., if agent j is moving towards agent
i, then uis|j < 0, which implies that the linear velocityui in (12) decreases. Depending also on the magnitudeof uic = ki tanh(‖ri−rgi‖), the linear velocity ui maybecome negative. The use of the maximum functionbetween zero and the minimum over ui|j is in orderto guarantee that agent i does not move with negativelinear velocity, i.e., backwards, for reasons that becomeevident later on.
2) If rjiTηj < 0, i.e., if agent j is moving away fromagent i, then uis|j > 0. This implies that the linearvelocity ui in (12) may increase. Nevertheless, whendij = dm, the velocity ui is equal to the safe velocityuis|j , implying that collision with agent j is avoided.
Denote now with Ni the set of neighbor agents for agenti. It follows that a sufficient condition for agent i to avoidcollisions is to adjust its linear velocity as:
ui = minj∈Ni|Ij<0
ui|j , (14)
where j ∈ Ni|Ij < 0 denotes the neighbor agents j of agenti for which the term I in (10) is negative; geometrically, thisdescribes the subset of neighbor agents j ∈ Ni which lie infront of agent i, i.e., the subset of neighbor agents j towardswhom agent i is moving. Hence, the safe velocity ui|j foragent i per neighbor agent j implies that the distance dijbetween agents i and j is lower bounded by the distancedm. Therefore, taking the minimum over all safe velocitiesui|j , j ∈ Ni implies that agent i adjusts its linear velocityso that it remains collision-free w.r.t. all its neighbors j. Themaximum function between zero and the minimum over ui|jis to guarantee that agent i does not move with negativelinear velocity, i.e., backwards. This is to ensure that therewill not be any collision among two agents that may happento move backwards while participating in a collision avoidingmaneuver.
We continue with the analysis by considering the twodistinct scenarios of interest separately:
1) Aggregation: So far we have that each agent i adjustsits linear velocity ui so that no collisions occur with anyof its neighbor agents j. The relative motion of agent iw.r.t. agent j and vice versa depends on the form of theintegral curves of (2), or in other words, on the formof the repulsive flows around each agent j 6= i. Thefollowing cases may occur:(i) The orientation φj of agent j is such that agent j
moves away from agent i; then the velocity ui ofagent i is adjusted according to (6), so that collisionis avoided and both agents keep moving towards theirgoal locations.
(ii) The orientation φj of agent j is such that agent jmoves towards agent i; then both agents exchangeinformation on their current states qi, qj and linearvelocities ui, uj , and adjust their linear velocitiesaccording to (6), respectively, so that collision isavoided; this physically reads that both agents slow

down until the inter-agent distance dij converges todm. It is straightforward to verify that the subset Ωijof the state space defined as Ωij = ri, rj | ‖ri −rj‖ = dm is the largest invariant set for the system,since by construction the terms rjiTηj and rjiTηiare zero on Ωij . This property holds by constructionfor the repulsive flows (5), see also [25], implyingthat the linear velocities ui and uj out of (6) are zeroon Ωij . Thus, system trajectories converge to Ωij ,which further reads that agents converge to arbitrarylocations such that their inter-agent distance is dm.
2) Avoidance: In a similar spirit to aggregation, the fol-lowing cases may occur:(i) The orientation φj of agent j is such that agent j
moves away from agent i; then the same reasoningholds as in case 1(i).
(ii) The orientation φj of agent j is such that agent jmoves towards agent i; then both agents exchangeinformation on their current states qi, qj and linearvelocities ui, uj , and adjust their linear velocitiesaccording to (6), respectively, so that collision isavoided; this physically reads that both agents slowdown to avoid collision. It is straightforward to verifythat the subset Ωij of the state space defined asΩij = ri, rj | ‖ri − rj‖ = dm is not aninvariant set for the system, since by constructionthe terms rjiTηj and rjiTηi are non-zero on Ωij .This property holds by construction for the repulsiveflows (9), see also [25]. This reads that the linearvelocities ui and uj out of (6) are non-zero on Ωij ,which further reads that system trajectories performsliding-like behavior across the surface Ωij . Unlesssystem trajectories get stuck on a possible chatteringZeno point on the sliding surface (geometrically thisreads that the goal locations and the current locationsof the locally connected interacting agents happen tolie on the same line), the agents converge to theirgoal locations while avoiding collisions.
IV. SIMULATION RESULTS
The efficacy of the proposed coordination control algo-rithms is demonstrated via simulation results.
A. Aggregation
We initially consider a scenario involving N = 50 agentswhich are assigned with the task to move towards a regionof interest and aggregate w.r.t. a point of interest r0. Theagents are randomly assigned their initial positions and haveto move towards their goal locations rgi, which are randomlyassigned within a circular region centered at the point ofinterest r0. The control gains are also randomly selected.The evolution of the motion of the agents along with thefinal aggregation shape are depicted in Fig. 2. For claritypurposes, not all agents are drawn in the first 4 snapshots,as the lie far away from the goal locations.
−0.75 −0.7 −0.65 −0.6 −0.55 −0.5 −0.45 −0.4 −0.35 −0.3 −0.25−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
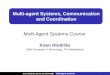
Fig. 3. The paths of N = 25 agents moving under the proposed controlstrategy.
Let us stress that the proposed algorithm does not prescribeany specific pattern on the agents’ final locations; all weknow is that agents will move towards their goal locations,selected around a point of interest, and will converge to thisregion. Achieving specific patterns might be beneficial inhaving multiple agents moving through confined environ-ments, and is thus ongoing research.
B. Avoidance
We consider N = 25 agents which are moving towardstheir goal locations (depicted with square markers) startingfrom goal positions (depicted with cross markers) whileavoiding collisions, see the resulting paths in Fig. 3. Thegoal locations are defined sufficiently far apart so that thecommunication regions do not overlap when agents lie ontheir goal locations. The evolution of agents’ motion isdepicted throughout the snapshots in Fig. 4.
V. CONCLUSIONS
This paper presented a unified view of coordination controlstrategies which achieve either aggregation or navigation ofunicycle multi-robot systems towards goal locations, usingonly local information and directed interactions. The plan-ning method is built upon vector fields serving as referencemotion plans for each agent. The form of the integral curveslocally around agents imposes the local coordination ruleachieving either aggregation, or navigation towards goallocations. It was shown that aggregation and navigation inunicycle multi-robot systems can be achieved using the samelinear velocity protocol, and slightly different angular veloc-ity protocols. The notion of semi-cooperative coordinationwas also introduced as a means of collision avoidance, whichcan be also seen as implicit prioritization among locallyconnected agents.

Fig. 2. Aggregation of 50 nonholonomic agents under the proposed control strategy.

Fig. 4. Collision-free motion of 25 nonholonomic agents under the proposed control strategy.

Current work focuses on the definition of vector fieldsencoding input constraints, such as curvature bounds, whichmay be more appropriate for aircraft and car-like vehicles.
REFERENCES
[1] W. Ren and Y. Cao, “Overview of recent research in distributedmulti-agent coordination,” in Distributed Coordination of Multi-agentNetworks, ser. Communications and Control Engineering. Springer-Verlag London Limited, 2011, ch. 2, pp. 23–41.
[2] L. E. Parker, “Path planning and motion coordination in multiplemobile robot teams,” in Encyclopedia of Complexity and SystemScience, R. A. Meyers, Ed. Springer, 2009.
[3] ——, “Decision making as optimization in multi-robot teams,” in Pro-ceedings of 8th International Conference on Distributed Computingand Internet Technology, ser. Lecture Notes in Computer Science,R. Ramanujam and S. Ramaswamy, Eds. Springer, 2012, vol. 7154,pp. 35–49.
[4] M. Yim, W.-M. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson,E. Klavins, and G. S. Chirikjian, “Modular self-reconfigurable robotsystems,” IEEE Robotics and Automation Magazine, pp. 43–52, Mar.2007.
[5] N. Michael, J. Fink, and V. Kumar, “Cooperative manipulation andtransportation with aerial robots,” Autonomous Robots, vol. 30, pp.73–86, 2011.
[6] R. Oung, F. Bourgault, M. Donovan, and R. D. Andrea, “Thedistributed flight array,” in Proc. of the 2010 IEEE InternationalConference on Robotics and Automation, Anchorage, Alaska, USA,May 2010, pp. 601–607.
[7] R. Ritz and R. D. Andrea, “Carrying a flexible payload with multipleflying vehicles,” in Proc. of the 2013 IEEE/RSJ International Confer-ence on Intelligent Robots and Systems, Tokyo, Japan, Nov. 2013, pp.3465–3471.
[8] V. Gazi and K. M. Passino, “A class of attractions/repulsion functionsfor stable swarm aggregations,” International Journal of Control, 2004.
[9] W. Li, “Stability analysis of swarms with general topology,” IEEETransactions on Systems, Man, and Cybernetics, Part B: Cybernetics,vol. 38, no. 4, pp. 1084–1097, 2008.
[10] M. A. Hsieh, A. Halasz, S. Berman, and V. Kumar, “Biologicallyinspired redistribution of a swarm of robots among multiple sites,”Swarm Intelligence, vol. 2, no. 2-4, 2008.
[11] D. V. Dimarogonas and K. J. Kyriakopoulos, “Connectedness pre-serving distributed swarm aggregation for multiple kinematic robots,”IEEE Transactions on Robotics, vol. 24, no. 5, pp. 1213–1223, Oct.2008.
[12] A. Gasparri, G. Oriolo, A. Priolo, and G. Ulivi, “A swarm aggregationalgorithm based on local interaction for multi-robot systems withactuator saturations,” in Proc. of the 2012 IEEE/RSJ InternationalConference on Intelligent Robots and Systems, Vilamoura, Algarve,Portugal, Oct. 2012, pp. 539–544.
[13] M. Gauci, J. Chen, W. Li, T. J. Dodd, and R. Gro, “Self-organized ag-gregation without computation,” The International Journal of RoboticsResearch, vol. 33, no. 8, pp. 1145–1161, 2014.
[14] M. Mesbahi and M. Egerstedt, Graph Theoretic Methods in MultiagentNetworks. Princeton University Press, 2010.
[15] R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algo-rithms and theory,” IEEE Transactions on Automatic Control, vol. 51,no. 3, pp. 401–420, Mar. 2006.
[16] W. Ren, R. W. Beard, and E. M. Atkins, “Information consensus inmulti-vehicle cooperative control,” IEEE Control Systems Magazine,vol. 27, no. 2, pp. 71–82, apr 2007.
[17] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus andcooperation in networked multi-agent systems,” Proceedings of theIEEE, vol. 97, no. 1, pp. 215–233, 2007.
[18] P. Lin, Y. Jia, and L. Li, “Distributed robust h∞ consensus controlin directed networks of agents with time-delay,” Systems & ControlLetters, vol. 57, pp. 643–653, 2008.
[19] J. Mei, W. Ren, and G. Ma, “Distributed containment control forlagrangian networks with parametric uncertainties under a directedgraph,” Automatica, vol. 48, pp. 653–659, 2012.
[20] Z. Qu, C. Li, and F. Lewis, “Cooperative control with distributedgain adaptation and connectivity estimation for directed networks,”International Journal of Robust and Nonlinear Control, 2012.
[21] J. liang Zhang, D. lian Qi, and M. Yu, “A game theoretic approachfor the distributed control of multi-agent systems under directed andtime-varying topology,” International Journal of Control, Automation,and Systems, vol. 12, no. 4, pp. 749–758, 2014.
[22] Z. Li, G. Wen, Z. Duan, and W. Ren, “Designing fully distributedconsensus protocols for linear multi-agent systems with directedgraphs,” IEEE Transactions on Automatic Control, to appear, 2014.[Online]. Available: http://arxiv.org/abs/1312.7377v2
[23] W. Ren, “On consensus algorithms for double-integrator dynamics,” inProc. of the 46th Conference on Decision and Control, New Orleans,LA, USA, Dec. 2007, pp. 2295–2300.
[24] K. Liu, G. Xie, W. Ren, and L. Wang, “Consensus for multi-agentsystems with inherent nonlinear dynamics under directed topologies,”Systems & Control Letters, vol. 62, no. 2, pp. 152–162, Feb. 2013.
[25] D. Panagou, “Motion planning and collision avoidance using naviga-tion vector fields,” in Proc. of the 2014 IEEE International Conferenceon Robotics and Automation, Hong Kong, China, Jun. 2014, pp. 3967–3972.