Embed Size (px)
Citation preview

Research ArticleDistributed Constraint Optimization with Flocking Behavior
Zhengquan Yang 1 Qing Zhang 1 and Zengqiang Chen 2
1College of Science Civil Aviation University of China Tianjin 300300 China2Department of Automation Nankai University Tianjin 300071 China
Correspondence should be addressed to Zhengquan Yang zquanyang163com
Received 18 July 2018 Revised 22 October 2018 Accepted 29 November 2018 Published 11 December 2018
Academic Editor Mohamed Boutayeb
Copyright copy 2018 ZhengquanYang et alThis is an open access article distributed under theCreativeCommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper studies distributed optimization having flocking behavior and local constraint set Multiagent systems with continuous-time and second-order dynamics are studied Each agent has a local constraint set and a local objective function which are known toonly one agentThe objective is for multiple agents to optimize a sum of the local functions with local interaction and informationFirst a bounded potential function to construct the controller is given and a distributed optimization algorithm that makes agroup of agents avoid collisions during the evolution is presentedThen it is proved that all agents track the optimal velocity whileavoiding collisions The proof of the main result is divided into three steps global set convergence consensus analysis and optimalset convergence Finally a simulation is included to illustrate the results
1 Introduction
The study of distributed optimization of multiagent hasattracted extensive attention in recent years The objec-tive of distributed optimization is to optimize the sumof local functions with local interaction and informationBoth unconstraint and constraint models of distributedoptimization problems were researched Nedic et al [1]firstly gave a distributed subgradient algorithm to investigateunconstrained distributed optimization problems and provedthat all agents optimize the sumof local functions over a time-varying graphWang et al [2] firstly introduced a continuous-time algorithm with undirected topology Rahili et al [3]studied a distributed optimization problemwith single-orderand second-order dynamics in which the local function istime-varying Zhao [4] studied a distributed continuous-timeoptimization problem for general linear multiagent systemsUnder edge- and node-based frameworks respectively theydeveloped two adaptive algorithms to minimize the teamperformance function Yang et al [5] studied distributedunconstraint optimization with flocking A distributed adap-tive protocol for multiagent was proposed to realise flockingbehavior For distributed constraint optimization problemsthere are also some results Nedic et al [6] presented a
distributed projected subgradient algorithm for the con-straint optimization problem and researched its convergenceproperties Somemodified or extended models of distributedconstrain optimization were also given [7ndash16] Qiu et al[8] studied a distributed convex optimization of continuous-time dynamics with a common state set constraint Theynoted that if the time-varying gains of the gradients satisfy apersistence condition the states of all agents converge to theoptimal point of the set constraints Lin et al [9] proposed anonuniform gradient gain control method and a finite-timecontrol method for distributed constraint optimization Zenget al [10] studied nonsmooth convex optimization problemand proposed a distributed continuous-time algorithm bycombining primal-dual methods for saddle point seeking andprojection methods for set constraints Lin [11] devoted todistributed optimization problems with nonuniform convexconstraint sets and nonuniform step-sizes Liu andWang [12]proposed a group of coupled two-layer projection networkswith bounded constraint Li et al [13] gave a distributeddiscrete-time control law for solving the nonconvex problemwith inequality constraints They transformed the nonconvexproblem into a sequence of strongly convex subproblemsthrough continuous convex approximation technique Zhanget al [14] optimized a sum of convex functions defined over a
HindawiComplexityVolume 2018 Article ID 1579865 8 pageshttpsdoiorg10115520181579865
2 Complexity
graph where every edge in the graph carried a linear equalityconstraint Hong et al [15] studied two first-order primal-dual based algorithms the Gradient Primal-Dual Algorithmand the Gradient Alternating Direction Method of Multi-pliers for solving a class of linearly constrained nonconvexoptimization problems Gu et al [16] proposed a solutiontool for distributed convex problems with coupling equalityconstraints The proposed algorithm was implemented time-changing directed networks
As is known to all there are a great number of resultsabout distributed optimization However the distributedoptimization with flocking behavior is rarely consideredFlocking problem is a significant issue considered by manyresearchers [17ndash25] The purpose of flocking problem is tocontrol a group of agents to move by local information whilemaintaining connectivity avoiding collisions and havingthe same speed Nevertheless the above results can not bedirectly applied to more complex flocking problems In thispaper a distributed optimization problem while consideringthe flocking behavior is researched The aim of this paper isto solve that problem with local constraint set Due to thecoexistence of constraint sets flocking behavior and opti-mization objectives there are great challenges in the researchThere are three major contributions in this manuscriptFirstly a bounded potential function is used to constructthe controller that makes a group of agents avoid collisionsduring the evolution Secondly our proposed control law letsthe velocity sate converge to the local constraint set in finitetime Thirdly the control law is proved to be correct in threeaspects
An outline of the paper is as follows The notations andsome essential concepts used in this paper are given in Sec-tion 2 In Section 3 we formulate the distributed constrainedoptimization with flocking behavior In Section 4 we shownthe main result and prove the main result in three stepsIn Section 5 a simulation example is presented Finallyconclusions are made in Section 6
2 Notations and Preliminaries
Notations The identity matrix in 119877119899times119899 is denoted by 119868119899The index set 1 2 119873 is denoted by N 119860 otimes 119861 is theKronecker product of 119860 and 119861 sgn(119904) is a component wisesign function of 119904 The gradient of 119891(119904) at 119904 is denoted bynabla119891(119904) The Euclidean norm of the vector 119904 is denoted by 1199041199041 denotes the 1-norm of the vector 119904 119875119883(119904) denotes theprojection of the vector 119904 onto the closed convex set X ie119875119883(119904) = argmin119904isin119883119904 minus 119904
An a dynamic undirected graph G(119905) is considered inthis paper having a node set V = 1 2 119873 and set oflinks E(119905) (119894 119895) isin E(119905) means that node 119895 is a neighbor ofnode 119894 The neighbors of vertex 119894 are given by 119873119894 = 119895 isinV (119894 119895) isin E The adjacency matrix of the graph G isA(119905) = [119886119894119895(119905)] isin 119877119873times119873 which is denoted as 119886119894119894(119905) = 0119886119894119895(119905) = 119886119895119894(119905) = 1 if (119894 119895) isin E(119905) otherwise 119886119894119895(119905) = 0By arbitrarily assigning an orientation for the edges in G(119905)using 119863(119905) = [119889119894119896(119905)] isin 119877119873times|E(119905)| represents the incidencematrix associated with the graph G(119905) where 119889119894119896(119905) = minus1 if
the edge 119890119896 leaves node 119894 and 119889119894119896(119905) = 1 if it enters node 119894and 119889119894119896(119905) = 0 otherwise The Laplacian ofG(119905) is denoted by119871(119905) = Λ minus 119860(119905) where Λ(119905) = diag1198891(119905) 1198892(119905) 119889119873(119905) isin119877119873times119873 is the degree matrix of G(119905) with 119889119894(119905) = sum119873119895=1119895 =119894 119886119894119895(119905)for 119894 isin N Note that for undirected graphs Laplacian matrix119871(119905) is a symmetric matrix satisfying 119871(119905) = 119863(119905)119863119879(119905) andwhen the graph G(119905) is connected the eigenvalues of 119871(119905)have order as 1205821(119871(119905)) = 0 lt 1205822(119871(119905)) le le 120582119873(119871(119905))Lemma 1 (see [26]) Suppose that119883 = 0 is closed convex set inR119899Then for any 119904 isin R119899 119904minus119875119883(119904) is continuous with respectto 119910 and nabla(12)119904 minus 119875119883(119904)2 = 119904 minus 119875119883(119904)Lemma 2 (see [27]) Let function 119891(119904) R119899 997888rarr R be adifferentiable and convex function For any 1199041 1199042 isin R119899
119891 (1199041) minus 119891 (1199042) ge [nabla119891 (1199042)]119879 (1199041 minus 1199042) (1)
3 Problem Formulation
We consider 119873 multiagents operating in R119899 with dynamicsexpressed by double integrators
119894 = V119894
V119894 = 119906119894119894 isin N
(2)
where 119909119894 isin 119877119899 is the position vector of agent 119894 V119894 isin 119877119899 isthe velocity vector and 119906119894 isin 119877119899 is the control input acting onagent 119894 A local cost function 119891119894(V) 119877119899 997888rarr 119877 is assigned toagent 119894( 119894 isin N) and it is known to only agent 119894 The globalcost function is denoted by
119891 (V) = 119873sum119894=1
119891119894 (V) (3)
The topology graph studied in this paper is dynamic Inthe remaining parts of this paper the dynamic undirectedgraph the adjacency matrix the incidence matrix and theLaplacian matrix on time 119905 are simply remarked as G 119860119863 and 119871 respectively In the dynamic graph we assume(119894 119895) isin E if and only if 119909119894 minus 119909119895 lt 119877 where 119877 gt 0 is thecommunication radius of an agent
The aim of this paper is to design the controller 119906119894for system (2) using local function and local informationgathered fromneighbors such that all agents track the optimalvelocity Vlowast(119905) while maintaining connectivity and avoidingcollisions The optimal velocity Vlowast(119905) satisfies
119898119894119899119894119898119894119911119890 119891 (V) = 119873sum119894=1
119891119894 (V)
119904119906119887119895119890119888119905 V isin Ω = 119873⋂119894=1
Ω119894 sub 119877119899(4)
where Ω119894 is the local constraint set and it is closed andconvex Let 119883 sub Ω denote the optimal set of problem (4)
Complexity 3
The problem defined in (4) is equivalent to
119898119894119899119894119898119894119911119890 119873sum119894=1
119891119894 (V119894)119904119906119887119895119890119888119905 V1 = V2 = sdot sdot sdot = V119873 V119894 isin Ω119894
(5)
To ensure problem (4) the following assumptions are needed
Assumption 3 Each function 119891119894(V) is strictly convex anddifferentiable Let nabla119891119894(V) = 120590V + 119892119894(V) forall119894 isin N where 120590 ge 0119892119894(V) is a continuous function satisfying 119892119894(119905) lt 119892 for acertain positive number 119892 and all 119905
BecauseΩ119894 is a closed convex set there is a constant 119904 gt 0which makes 119909 le 119904 forall119909 isin Ω119894 Moreover if the function119891(V) is convex and differentiable and the constrained setΩ isconvex and closed we can get the optimal solution set119883 isin Ωof problem (4) is nonempty closed and bounded
In order to smooth the controller we adopt the norm thatfirstly presented in [21]
119911120590 = radic1 + 1199112 minus 1 (6)
The function 119911120590 unlike the norm 119911which is not differen-tiable at 119911 = 0 is differentiable everywhere The gradient of119911120590 is given by
nabla 119911120590 = 119911radic1 + 1199112 = 119911
1 + 1199112120590 (7)
To propose a controller law for collision avoidance weneed to give a smooth collective potential function 119881119894119895Definition 4 The potential function 119881119894119895 is a differentiablenonnegative function of 119909119894 minus119909119895120590 which satisfies the follow-ing conditions(1) 119881119894119895 = 119881119895119894 has a unique minimum in 119909119894 minus 119909119895 = 119889where 119889 is a desired distance between agents 119894 and 119895 and 0 lt119889 lt 119877 and 119877 gt 0 is a constant(2) 120597119881119894119895120597(119909119894 minus 119909119895120590) is continuous satisfying
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
le 0 0 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 lt 119889120590120597119881119894119895
120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)ge 0 119889120590 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 le 119877120590
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
= 0 119877120590 lt 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590
(8)
Remark 5 There are many potential functions satisfyingDefinition 4 such as the potential functions defined in [21]
Remark 6 From the characteristic of function 120597119881119894119895120597(119909119894 minus119909119895120590) especially the continuity in interval [0 119877120590) weknow that function 120597119881119894119895120597(119909119894 minus 119909119895120590)) is bounded Sonabla119909119894119881119894119895 = (120597119881119894119895120597(119909119894minus119909119895120590))((119909119894minus119909119895)radic1 + 119909119894 minus 1199091198952) is also
bounded for 119909119894minus119909119895 isin [0 119877)Thus there is a constant119876 gt 0such that nabla119909119894119881119894119895 le 119876 119909119894 minus 119909119895 isin [0 119877)
To solve our objective of this paper we present thealgorithm
119906119894 (119905) = minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
(9)
where 120572 and 120573 are positive constants and 119875Ω119894(sdot) is theprojection onto Ω119894 It is worth pointing out that nabla119891119894(V119894)depends on only agent 119894rsquos velocityRemark 7 In (9) the first term is used to regulate positionbetween agent 119894 and its neighbors this term is responsiblefor collision avoidance and cohesion in the group the secondterm is to the desired velocity alignment the third term is anegative gradient 119891119894(V119894) and the fourth term is used to pullthe velocity vector onto Ω1198944 Main Theorem and Convergence Analysis
We give the main theorem of this paper and propose theconvergence of the control law in this subsection First wegive the main result of this paper as follows
Theorem 8 Assume that the graph G(119905) is connected for all 119905and Assumption 3 holds For system (2) with algorithm (9) ifall 120572 gt 4Φ1205822(119871) and 120573 gt 119876119873 + 120572119873 + 119904 + 119892 the agentsrsquovelocities in the group track the optimal velocity and the agentsavoid interagent collisions
In the following we are interested in proving Theorem 8In order to do so first we have to verify global set conver-gence second we have to give consensus analysis and thirdwe have to prove all agents converge to the optimal set
Proof First to verify global set convergence let us considerthe Lyapunov function candidate
1198811 (119905) = 12119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 (10)
1 (119905) = 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 V119894 =119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817]]
le [119873119876 + 120572119873 minus 120573]
sdot 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817 minus 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [120590V119894
4 Complexity
+ 119892119894 (V119894))] = [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
minus 120590 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 +119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [119875Ω119894 (V119894)
+ 119892119894 (V119894))] le [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
+ 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)10038171003817100381710038171003817 (119904 + 119892) = minus [120573 minus (119873119876 + 120572119873 + 119904
+ 119892)]radic1198811 (119905)(11)
In the above prove we have used the fact 119875Ω119894(V119894) isin Ω119894 and119875Ω119894(V119894) le 119904 From (11) it follows that
1 (119905)radic1198811 (119905) le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892)] (12)
We integrate on both sides of inequality and get the followinginequality
radic1198811 (119905) minus radic1198811 (1199050)le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892))] (119905 minus 1199050)
(13)
Thus 1198811(119905) converges to zero in finite time Namely there isa constant 1199051 gt 1199050 such that for all 119905 gt 1199051 V119894 minus 119875Ω(V119894) = 0That is under control (9) V119894(119905) isin Ω119894 for all 119905 gt 1199051
Second we will present the consensus analysis From theabove proof for all 119905 gt 1199051 we can get V119894(119905) isin Ω119894 and119894 (119905) = V119894 (119905)V119894 (119905) = minus sum
119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894) 119894 = 1 2 sdot sdot sdot 119873
(14)
From Assumption 3 we can get nabla119891119894(V119894) is continuousWhen Ω is a bounded closed convex set from the propertyof continuous functions on closed bounded sets we can getnabla119891119894(V119894) is upper bounded onΩ119894 So there is a constant 119872 gt 0such that
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 le 119872 forall119905 gt 1199051 (15)
For all 119905 gt 1199051 consider the Lyapunov function candidate
1198812 = 12119873sum119894=1
sum119895isin119873119894
119881119894119895 + 12119873sum119894=1
V119879119894 V119894 (16)
Note however that due to the symmetric nature of 11988111989411989512119873sum119894=1
sum119895isin119873119894
119894119895 = 12119873sum119894=1
sum119895isin119873119894
119879119894119895nabla119909119894119895119881119894119895 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 (17)
So taking time derivative of 1198812 we can get
2 = 12119873sum119894=1
sum119895isin119873119894
i119895 +119873sum119894=1
V119879119894 V119894 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 +119873sum119894=1
V119879119894
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)]]= minus120572 119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)
(18)
Because 119886119894119895 = 119886119895119894 = 1 if (119894 119895) isin E we have
119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) = 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
= 12 [
[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)]]= 1
2 [[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119895119894V119879119895 sgn (V119895 minus V119894)]]= 1
2
sdot 119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
(19)
Thus (18) can be rewritten by
2 = minus1205722119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)(20)
If we let 119881 = (V1198791 V1198792 sdot sdot sdot V119879119873)119879 Φ = (1206011198791 1206011198792 sdot sdot sdot 120601119879119873)119879 thenthe above equation can be rewritten as
1 = minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 119881119879Φle minus120572
410038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 120572
4radic119881119879 (119863119863119879 otimes 119868119898) 119881+ 1198812 Φ2
le minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724radic1205822 (119871) 1198812 + 1198812 Φ2
= minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus (1205724radic1205822 (119871) minus Φ2) 1198812
(21)
Complexity 5
Let 120601 = nabla119891119894(V119894 119905) we know 120601 is upper bounded andΦ2 is upper bounded forall119905 gt 1199051 So if 120572 gt 4Φ1205822(119871) we canget
2 lt minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 = minus1205724119873sum119894=1
119873sum119895=1
119886119894119895 10038171003817100381710038171003817V119894 minus V119895100381710038171003817100381710038171 le 0 (22)
By LaSallersquos invariance principle we can get V1(119905) =V2(119905) = sdot sdot sdot = V119873(119905) isin Ω = ⋂119873119894=1Ω119894 as 119905 997888rarr infin which impliesthat the velocities of all agents in system (2) asymptoticallybecome the same
If we let V = (1119873)sum119873119894=1 V119894 from the above proof we canget V119894(119905) = V as 119905 997888rarr infin So for any 120576 gt 0 there exists a time119905120576 (119905120576 gt 1199051) such that V119894 V isin Ω and
1003817100381710038171003817V119894 minus V1003817100381710038171003817 lt 120576119873119872 (23)
forall119905 ge 119905120576From the convexity of the function119891119894 (V119894) and (15) we have119873sum119894=1
1003817100381710038171003817119891119894 (V) minus 119891119894 (V119894)1003817100381710038171003817 = 119873sum119894=1
100381710038171003817100381710038171003817[nabla119891119894 (V119894)]119879 (V minus V)100381710038171003817100381710038171003817
le 119873sum119894=1
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 (V minus V) lt 120576forall119905 ge 119905120576
(24)
So for all 119905 gt 119905120576 (14) and (24) holdFor 119905 gt 119905120576 denote
1198813 (119905) = 12119873sum119894=1
1003817100381710038171003817V119894 minus 119875119883 (V)10038171003817100381710038172 + 12119873sum119894=1
sum119895isin119873119894
119881119894119895 (25)
Similar to the proof of above we have
3 (119905) = minus120572 119873sum119894=1
sum119895isin119873119894
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
(V119894 minus 119875119883 (V))119879nabla119891119894 (V119894)
le 119873sum119894=1
(119875119883 (V) minus V119894)119879 nabla119891119894 (V119894)
le 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V119894)]
= 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]
= [119891 (119875119883 (V)) minus 119891 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]lt [119891 (119875119883 (V)) minus 119891 (V)] + 120576 le 120576
(26)
0 1 2 3 4 5 60
2
4
6
8
10
12
Figure 1 Shape of the bounded potential function 120595(119911)
In view of the arbitrariness of 120576 let 120576 997888rarr 0 we have 3(119905) lt[119891(119875119883(V)) minus 119891(V)] le 0 for 119905 gt 1199052 By LaSallersquos invarianceprinciple and the unique global minimum of 119891(V) on Ω wecan get lim119905997888rarrinfinV119894 minus 119875119883(V) = 0 That is the global costfunction (4) is minimized as 119905 997888rarr infin
Remark 9 Compared with the distributed optimization witha common constraint [18ndash20] we extended the control law todistributed optimization with local constraints Besides theresult of [8] requires time-varying gains of the gradients tosatisfy a persistence condition and the gains conditions ofthis paper are relatively easy to satisfy Compared with thecontrol law in [10 12] the control law this paper is relativelysimpleMoreover this paper addresses the issue of distributedoptimization problem having flocking and local constraintset
5 Simulation
In this section a numerical example is presented to verify thefeasibility of the proposed algorithm and correctness of ourtheoretical analysis
For giving the potential function119881119894119895 we choose the actionfunction 120601(119911) as follows
120601 (119911) =
119911 minus 119889120590radic1 + (119911 minus 119889120590)2
0 le 119911 lt 1198771205900 119900119905ℎ119890119903119908119894119904119890
(27)
which satisfies condition (2) in Definition 4The corresponding repulsive potential function is
120595 (119911) = int119911119889120590
120601 (119904) 119889119904 (28)
The following parameters remain fixed through the sim-ulation 119889 = 3 and 119877 = 5 The potential function 120595(119911) has theshape as in Figure 1
6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
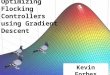
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Complexity
graph where every edge in the graph carried a linear equalityconstraint Hong et al [15] studied two first-order primal-dual based algorithms the Gradient Primal-Dual Algorithmand the Gradient Alternating Direction Method of Multi-pliers for solving a class of linearly constrained nonconvexoptimization problems Gu et al [16] proposed a solutiontool for distributed convex problems with coupling equalityconstraints The proposed algorithm was implemented time-changing directed networks
As is known to all there are a great number of resultsabout distributed optimization However the distributedoptimization with flocking behavior is rarely consideredFlocking problem is a significant issue considered by manyresearchers [17ndash25] The purpose of flocking problem is tocontrol a group of agents to move by local information whilemaintaining connectivity avoiding collisions and havingthe same speed Nevertheless the above results can not bedirectly applied to more complex flocking problems In thispaper a distributed optimization problem while consideringthe flocking behavior is researched The aim of this paper isto solve that problem with local constraint set Due to thecoexistence of constraint sets flocking behavior and opti-mization objectives there are great challenges in the researchThere are three major contributions in this manuscriptFirstly a bounded potential function is used to constructthe controller that makes a group of agents avoid collisionsduring the evolution Secondly our proposed control law letsthe velocity sate converge to the local constraint set in finitetime Thirdly the control law is proved to be correct in threeaspects
An outline of the paper is as follows The notations andsome essential concepts used in this paper are given in Sec-tion 2 In Section 3 we formulate the distributed constrainedoptimization with flocking behavior In Section 4 we shownthe main result and prove the main result in three stepsIn Section 5 a simulation example is presented Finallyconclusions are made in Section 6
2 Notations and Preliminaries
Notations The identity matrix in 119877119899times119899 is denoted by 119868119899The index set 1 2 119873 is denoted by N 119860 otimes 119861 is theKronecker product of 119860 and 119861 sgn(119904) is a component wisesign function of 119904 The gradient of 119891(119904) at 119904 is denoted bynabla119891(119904) The Euclidean norm of the vector 119904 is denoted by 1199041199041 denotes the 1-norm of the vector 119904 119875119883(119904) denotes theprojection of the vector 119904 onto the closed convex set X ie119875119883(119904) = argmin119904isin119883119904 minus 119904
An a dynamic undirected graph G(119905) is considered inthis paper having a node set V = 1 2 119873 and set oflinks E(119905) (119894 119895) isin E(119905) means that node 119895 is a neighbor ofnode 119894 The neighbors of vertex 119894 are given by 119873119894 = 119895 isinV (119894 119895) isin E The adjacency matrix of the graph G isA(119905) = [119886119894119895(119905)] isin 119877119873times119873 which is denoted as 119886119894119894(119905) = 0119886119894119895(119905) = 119886119895119894(119905) = 1 if (119894 119895) isin E(119905) otherwise 119886119894119895(119905) = 0By arbitrarily assigning an orientation for the edges in G(119905)using 119863(119905) = [119889119894119896(119905)] isin 119877119873times|E(119905)| represents the incidencematrix associated with the graph G(119905) where 119889119894119896(119905) = minus1 if
the edge 119890119896 leaves node 119894 and 119889119894119896(119905) = 1 if it enters node 119894and 119889119894119896(119905) = 0 otherwise The Laplacian ofG(119905) is denoted by119871(119905) = Λ minus 119860(119905) where Λ(119905) = diag1198891(119905) 1198892(119905) 119889119873(119905) isin119877119873times119873 is the degree matrix of G(119905) with 119889119894(119905) = sum119873119895=1119895 =119894 119886119894119895(119905)for 119894 isin N Note that for undirected graphs Laplacian matrix119871(119905) is a symmetric matrix satisfying 119871(119905) = 119863(119905)119863119879(119905) andwhen the graph G(119905) is connected the eigenvalues of 119871(119905)have order as 1205821(119871(119905)) = 0 lt 1205822(119871(119905)) le le 120582119873(119871(119905))Lemma 1 (see [26]) Suppose that119883 = 0 is closed convex set inR119899Then for any 119904 isin R119899 119904minus119875119883(119904) is continuous with respectto 119910 and nabla(12)119904 minus 119875119883(119904)2 = 119904 minus 119875119883(119904)Lemma 2 (see [27]) Let function 119891(119904) R119899 997888rarr R be adifferentiable and convex function For any 1199041 1199042 isin R119899
119891 (1199041) minus 119891 (1199042) ge [nabla119891 (1199042)]119879 (1199041 minus 1199042) (1)
3 Problem Formulation
We consider 119873 multiagents operating in R119899 with dynamicsexpressed by double integrators
119894 = V119894
V119894 = 119906119894119894 isin N
(2)
where 119909119894 isin 119877119899 is the position vector of agent 119894 V119894 isin 119877119899 isthe velocity vector and 119906119894 isin 119877119899 is the control input acting onagent 119894 A local cost function 119891119894(V) 119877119899 997888rarr 119877 is assigned toagent 119894( 119894 isin N) and it is known to only agent 119894 The globalcost function is denoted by
119891 (V) = 119873sum119894=1
119891119894 (V) (3)
The topology graph studied in this paper is dynamic Inthe remaining parts of this paper the dynamic undirectedgraph the adjacency matrix the incidence matrix and theLaplacian matrix on time 119905 are simply remarked as G 119860119863 and 119871 respectively In the dynamic graph we assume(119894 119895) isin E if and only if 119909119894 minus 119909119895 lt 119877 where 119877 gt 0 is thecommunication radius of an agent
The aim of this paper is to design the controller 119906119894for system (2) using local function and local informationgathered fromneighbors such that all agents track the optimalvelocity Vlowast(119905) while maintaining connectivity and avoidingcollisions The optimal velocity Vlowast(119905) satisfies
119898119894119899119894119898119894119911119890 119891 (V) = 119873sum119894=1
119891119894 (V)
119904119906119887119895119890119888119905 V isin Ω = 119873⋂119894=1
Ω119894 sub 119877119899(4)
where Ω119894 is the local constraint set and it is closed andconvex Let 119883 sub Ω denote the optimal set of problem (4)
Complexity 3
The problem defined in (4) is equivalent to
119898119894119899119894119898119894119911119890 119873sum119894=1
119891119894 (V119894)119904119906119887119895119890119888119905 V1 = V2 = sdot sdot sdot = V119873 V119894 isin Ω119894
(5)
To ensure problem (4) the following assumptions are needed
Assumption 3 Each function 119891119894(V) is strictly convex anddifferentiable Let nabla119891119894(V) = 120590V + 119892119894(V) forall119894 isin N where 120590 ge 0119892119894(V) is a continuous function satisfying 119892119894(119905) lt 119892 for acertain positive number 119892 and all 119905
BecauseΩ119894 is a closed convex set there is a constant 119904 gt 0which makes 119909 le 119904 forall119909 isin Ω119894 Moreover if the function119891(V) is convex and differentiable and the constrained setΩ isconvex and closed we can get the optimal solution set119883 isin Ωof problem (4) is nonempty closed and bounded
In order to smooth the controller we adopt the norm thatfirstly presented in [21]
119911120590 = radic1 + 1199112 minus 1 (6)
The function 119911120590 unlike the norm 119911which is not differen-tiable at 119911 = 0 is differentiable everywhere The gradient of119911120590 is given by
nabla 119911120590 = 119911radic1 + 1199112 = 119911
1 + 1199112120590 (7)
To propose a controller law for collision avoidance weneed to give a smooth collective potential function 119881119894119895Definition 4 The potential function 119881119894119895 is a differentiablenonnegative function of 119909119894 minus119909119895120590 which satisfies the follow-ing conditions(1) 119881119894119895 = 119881119895119894 has a unique minimum in 119909119894 minus 119909119895 = 119889where 119889 is a desired distance between agents 119894 and 119895 and 0 lt119889 lt 119877 and 119877 gt 0 is a constant(2) 120597119881119894119895120597(119909119894 minus 119909119895120590) is continuous satisfying
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
le 0 0 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 lt 119889120590120597119881119894119895
120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)ge 0 119889120590 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 le 119877120590
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
= 0 119877120590 lt 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590
(8)
Remark 5 There are many potential functions satisfyingDefinition 4 such as the potential functions defined in [21]
Remark 6 From the characteristic of function 120597119881119894119895120597(119909119894 minus119909119895120590) especially the continuity in interval [0 119877120590) weknow that function 120597119881119894119895120597(119909119894 minus 119909119895120590)) is bounded Sonabla119909119894119881119894119895 = (120597119881119894119895120597(119909119894minus119909119895120590))((119909119894minus119909119895)radic1 + 119909119894 minus 1199091198952) is also
bounded for 119909119894minus119909119895 isin [0 119877)Thus there is a constant119876 gt 0such that nabla119909119894119881119894119895 le 119876 119909119894 minus 119909119895 isin [0 119877)
To solve our objective of this paper we present thealgorithm
119906119894 (119905) = minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
(9)
where 120572 and 120573 are positive constants and 119875Ω119894(sdot) is theprojection onto Ω119894 It is worth pointing out that nabla119891119894(V119894)depends on only agent 119894rsquos velocityRemark 7 In (9) the first term is used to regulate positionbetween agent 119894 and its neighbors this term is responsiblefor collision avoidance and cohesion in the group the secondterm is to the desired velocity alignment the third term is anegative gradient 119891119894(V119894) and the fourth term is used to pullthe velocity vector onto Ω1198944 Main Theorem and Convergence Analysis
We give the main theorem of this paper and propose theconvergence of the control law in this subsection First wegive the main result of this paper as follows
Theorem 8 Assume that the graph G(119905) is connected for all 119905and Assumption 3 holds For system (2) with algorithm (9) ifall 120572 gt 4Φ1205822(119871) and 120573 gt 119876119873 + 120572119873 + 119904 + 119892 the agentsrsquovelocities in the group track the optimal velocity and the agentsavoid interagent collisions
In the following we are interested in proving Theorem 8In order to do so first we have to verify global set conver-gence second we have to give consensus analysis and thirdwe have to prove all agents converge to the optimal set
Proof First to verify global set convergence let us considerthe Lyapunov function candidate
1198811 (119905) = 12119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 (10)
1 (119905) = 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 V119894 =119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817]]
le [119873119876 + 120572119873 minus 120573]
sdot 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817 minus 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [120590V119894
4 Complexity
+ 119892119894 (V119894))] = [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
minus 120590 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 +119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [119875Ω119894 (V119894)
+ 119892119894 (V119894))] le [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
+ 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)10038171003817100381710038171003817 (119904 + 119892) = minus [120573 minus (119873119876 + 120572119873 + 119904
+ 119892)]radic1198811 (119905)(11)
In the above prove we have used the fact 119875Ω119894(V119894) isin Ω119894 and119875Ω119894(V119894) le 119904 From (11) it follows that
1 (119905)radic1198811 (119905) le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892)] (12)
We integrate on both sides of inequality and get the followinginequality
radic1198811 (119905) minus radic1198811 (1199050)le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892))] (119905 minus 1199050)
(13)
Thus 1198811(119905) converges to zero in finite time Namely there isa constant 1199051 gt 1199050 such that for all 119905 gt 1199051 V119894 minus 119875Ω(V119894) = 0That is under control (9) V119894(119905) isin Ω119894 for all 119905 gt 1199051
Second we will present the consensus analysis From theabove proof for all 119905 gt 1199051 we can get V119894(119905) isin Ω119894 and119894 (119905) = V119894 (119905)V119894 (119905) = minus sum
119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894) 119894 = 1 2 sdot sdot sdot 119873
(14)
From Assumption 3 we can get nabla119891119894(V119894) is continuousWhen Ω is a bounded closed convex set from the propertyof continuous functions on closed bounded sets we can getnabla119891119894(V119894) is upper bounded onΩ119894 So there is a constant 119872 gt 0such that
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 le 119872 forall119905 gt 1199051 (15)
For all 119905 gt 1199051 consider the Lyapunov function candidate
1198812 = 12119873sum119894=1
sum119895isin119873119894
119881119894119895 + 12119873sum119894=1
V119879119894 V119894 (16)
Note however that due to the symmetric nature of 11988111989411989512119873sum119894=1
sum119895isin119873119894
119894119895 = 12119873sum119894=1
sum119895isin119873119894
119879119894119895nabla119909119894119895119881119894119895 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 (17)
So taking time derivative of 1198812 we can get
2 = 12119873sum119894=1
sum119895isin119873119894
i119895 +119873sum119894=1
V119879119894 V119894 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 +119873sum119894=1
V119879119894
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)]]= minus120572 119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)
(18)
Because 119886119894119895 = 119886119895119894 = 1 if (119894 119895) isin E we have
119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) = 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
= 12 [
[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)]]= 1
2 [[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119895119894V119879119895 sgn (V119895 minus V119894)]]= 1
2
sdot 119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
(19)
Thus (18) can be rewritten by
2 = minus1205722119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)(20)
If we let 119881 = (V1198791 V1198792 sdot sdot sdot V119879119873)119879 Φ = (1206011198791 1206011198792 sdot sdot sdot 120601119879119873)119879 thenthe above equation can be rewritten as
1 = minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 119881119879Φle minus120572
410038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 120572
4radic119881119879 (119863119863119879 otimes 119868119898) 119881+ 1198812 Φ2
le minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724radic1205822 (119871) 1198812 + 1198812 Φ2
= minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus (1205724radic1205822 (119871) minus Φ2) 1198812
(21)
Complexity 5
Let 120601 = nabla119891119894(V119894 119905) we know 120601 is upper bounded andΦ2 is upper bounded forall119905 gt 1199051 So if 120572 gt 4Φ1205822(119871) we canget
2 lt minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 = minus1205724119873sum119894=1
119873sum119895=1
119886119894119895 10038171003817100381710038171003817V119894 minus V119895100381710038171003817100381710038171 le 0 (22)
By LaSallersquos invariance principle we can get V1(119905) =V2(119905) = sdot sdot sdot = V119873(119905) isin Ω = ⋂119873119894=1Ω119894 as 119905 997888rarr infin which impliesthat the velocities of all agents in system (2) asymptoticallybecome the same
If we let V = (1119873)sum119873119894=1 V119894 from the above proof we canget V119894(119905) = V as 119905 997888rarr infin So for any 120576 gt 0 there exists a time119905120576 (119905120576 gt 1199051) such that V119894 V isin Ω and
1003817100381710038171003817V119894 minus V1003817100381710038171003817 lt 120576119873119872 (23)
forall119905 ge 119905120576From the convexity of the function119891119894 (V119894) and (15) we have119873sum119894=1
1003817100381710038171003817119891119894 (V) minus 119891119894 (V119894)1003817100381710038171003817 = 119873sum119894=1
100381710038171003817100381710038171003817[nabla119891119894 (V119894)]119879 (V minus V)100381710038171003817100381710038171003817
le 119873sum119894=1
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 (V minus V) lt 120576forall119905 ge 119905120576
(24)
So for all 119905 gt 119905120576 (14) and (24) holdFor 119905 gt 119905120576 denote
1198813 (119905) = 12119873sum119894=1
1003817100381710038171003817V119894 minus 119875119883 (V)10038171003817100381710038172 + 12119873sum119894=1
sum119895isin119873119894
119881119894119895 (25)
Similar to the proof of above we have
3 (119905) = minus120572 119873sum119894=1
sum119895isin119873119894
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
(V119894 minus 119875119883 (V))119879nabla119891119894 (V119894)
le 119873sum119894=1
(119875119883 (V) minus V119894)119879 nabla119891119894 (V119894)
le 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V119894)]
= 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]
= [119891 (119875119883 (V)) minus 119891 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]lt [119891 (119875119883 (V)) minus 119891 (V)] + 120576 le 120576
(26)
0 1 2 3 4 5 60
2
4
6
8
10
12
Figure 1 Shape of the bounded potential function 120595(119911)
In view of the arbitrariness of 120576 let 120576 997888rarr 0 we have 3(119905) lt[119891(119875119883(V)) minus 119891(V)] le 0 for 119905 gt 1199052 By LaSallersquos invarianceprinciple and the unique global minimum of 119891(V) on Ω wecan get lim119905997888rarrinfinV119894 minus 119875119883(V) = 0 That is the global costfunction (4) is minimized as 119905 997888rarr infin
Remark 9 Compared with the distributed optimization witha common constraint [18ndash20] we extended the control law todistributed optimization with local constraints Besides theresult of [8] requires time-varying gains of the gradients tosatisfy a persistence condition and the gains conditions ofthis paper are relatively easy to satisfy Compared with thecontrol law in [10 12] the control law this paper is relativelysimpleMoreover this paper addresses the issue of distributedoptimization problem having flocking and local constraintset
5 Simulation
In this section a numerical example is presented to verify thefeasibility of the proposed algorithm and correctness of ourtheoretical analysis
For giving the potential function119881119894119895 we choose the actionfunction 120601(119911) as follows
120601 (119911) =
119911 minus 119889120590radic1 + (119911 minus 119889120590)2
0 le 119911 lt 1198771205900 119900119905ℎ119890119903119908119894119904119890
(27)
which satisfies condition (2) in Definition 4The corresponding repulsive potential function is
120595 (119911) = int119911119889120590
120601 (119904) 119889119904 (28)
The following parameters remain fixed through the sim-ulation 119889 = 3 and 119877 = 5 The potential function 120595(119911) has theshape as in Figure 1
6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Complexity 3
The problem defined in (4) is equivalent to
119898119894119899119894119898119894119911119890 119873sum119894=1
119891119894 (V119894)119904119906119887119895119890119888119905 V1 = V2 = sdot sdot sdot = V119873 V119894 isin Ω119894
(5)
To ensure problem (4) the following assumptions are needed
Assumption 3 Each function 119891119894(V) is strictly convex anddifferentiable Let nabla119891119894(V) = 120590V + 119892119894(V) forall119894 isin N where 120590 ge 0119892119894(V) is a continuous function satisfying 119892119894(119905) lt 119892 for acertain positive number 119892 and all 119905
BecauseΩ119894 is a closed convex set there is a constant 119904 gt 0which makes 119909 le 119904 forall119909 isin Ω119894 Moreover if the function119891(V) is convex and differentiable and the constrained setΩ isconvex and closed we can get the optimal solution set119883 isin Ωof problem (4) is nonempty closed and bounded
In order to smooth the controller we adopt the norm thatfirstly presented in [21]
119911120590 = radic1 + 1199112 minus 1 (6)
The function 119911120590 unlike the norm 119911which is not differen-tiable at 119911 = 0 is differentiable everywhere The gradient of119911120590 is given by
nabla 119911120590 = 119911radic1 + 1199112 = 119911
1 + 1199112120590 (7)
To propose a controller law for collision avoidance weneed to give a smooth collective potential function 119881119894119895Definition 4 The potential function 119881119894119895 is a differentiablenonnegative function of 119909119894 minus119909119895120590 which satisfies the follow-ing conditions(1) 119881119894119895 = 119881119895119894 has a unique minimum in 119909119894 minus 119909119895 = 119889where 119889 is a desired distance between agents 119894 and 119895 and 0 lt119889 lt 119877 and 119877 gt 0 is a constant(2) 120597119881119894119895120597(119909119894 minus 119909119895120590) is continuous satisfying
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
le 0 0 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 lt 119889120590120597119881119894119895
120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)ge 0 119889120590 le 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590 le 119877120590
120597119881119894119895120597 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590)
= 0 119877120590 lt 10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590
(8)
Remark 5 There are many potential functions satisfyingDefinition 4 such as the potential functions defined in [21]
Remark 6 From the characteristic of function 120597119881119894119895120597(119909119894 minus119909119895120590) especially the continuity in interval [0 119877120590) weknow that function 120597119881119894119895120597(119909119894 minus 119909119895120590)) is bounded Sonabla119909119894119881119894119895 = (120597119881119894119895120597(119909119894minus119909119895120590))((119909119894minus119909119895)radic1 + 119909119894 minus 1199091198952) is also
bounded for 119909119894minus119909119895 isin [0 119877)Thus there is a constant119876 gt 0such that nabla119909119894119881119894119895 le 119876 119909119894 minus 119909119895 isin [0 119877)
To solve our objective of this paper we present thealgorithm
119906119894 (119905) = minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
(9)
where 120572 and 120573 are positive constants and 119875Ω119894(sdot) is theprojection onto Ω119894 It is worth pointing out that nabla119891119894(V119894)depends on only agent 119894rsquos velocityRemark 7 In (9) the first term is used to regulate positionbetween agent 119894 and its neighbors this term is responsiblefor collision avoidance and cohesion in the group the secondterm is to the desired velocity alignment the third term is anegative gradient 119891119894(V119894) and the fourth term is used to pullthe velocity vector onto Ω1198944 Main Theorem and Convergence Analysis
We give the main theorem of this paper and propose theconvergence of the control law in this subsection First wegive the main result of this paper as follows
Theorem 8 Assume that the graph G(119905) is connected for all 119905and Assumption 3 holds For system (2) with algorithm (9) ifall 120572 gt 4Φ1205822(119871) and 120573 gt 119876119873 + 120572119873 + 119904 + 119892 the agentsrsquovelocities in the group track the optimal velocity and the agentsavoid interagent collisions
In the following we are interested in proving Theorem 8In order to do so first we have to verify global set conver-gence second we have to give consensus analysis and thirdwe have to prove all agents converge to the optimal set
Proof First to verify global set convergence let us considerthe Lyapunov function candidate
1198811 (119905) = 12119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 (10)
1 (119905) = 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 V119894 =119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)
minus 120573 (V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817]]
le [119873119876 + 120572119873 minus 120573]
sdot 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817 minus 119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [120590V119894
4 Complexity
+ 119892119894 (V119894))] = [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
minus 120590 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 +119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [119875Ω119894 (V119894)
+ 119892119894 (V119894))] le [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
+ 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)10038171003817100381710038171003817 (119904 + 119892) = minus [120573 minus (119873119876 + 120572119873 + 119904
+ 119892)]radic1198811 (119905)(11)
In the above prove we have used the fact 119875Ω119894(V119894) isin Ω119894 and119875Ω119894(V119894) le 119904 From (11) it follows that
1 (119905)radic1198811 (119905) le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892)] (12)
We integrate on both sides of inequality and get the followinginequality
radic1198811 (119905) minus radic1198811 (1199050)le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892))] (119905 minus 1199050)
(13)
Thus 1198811(119905) converges to zero in finite time Namely there isa constant 1199051 gt 1199050 such that for all 119905 gt 1199051 V119894 minus 119875Ω(V119894) = 0That is under control (9) V119894(119905) isin Ω119894 for all 119905 gt 1199051
Second we will present the consensus analysis From theabove proof for all 119905 gt 1199051 we can get V119894(119905) isin Ω119894 and119894 (119905) = V119894 (119905)V119894 (119905) = minus sum
119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894) 119894 = 1 2 sdot sdot sdot 119873
(14)
From Assumption 3 we can get nabla119891119894(V119894) is continuousWhen Ω is a bounded closed convex set from the propertyof continuous functions on closed bounded sets we can getnabla119891119894(V119894) is upper bounded onΩ119894 So there is a constant 119872 gt 0such that
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 le 119872 forall119905 gt 1199051 (15)
For all 119905 gt 1199051 consider the Lyapunov function candidate
1198812 = 12119873sum119894=1
sum119895isin119873119894
119881119894119895 + 12119873sum119894=1
V119879119894 V119894 (16)
Note however that due to the symmetric nature of 11988111989411989512119873sum119894=1
sum119895isin119873119894
119894119895 = 12119873sum119894=1
sum119895isin119873119894
119879119894119895nabla119909119894119895119881119894119895 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 (17)
So taking time derivative of 1198812 we can get
2 = 12119873sum119894=1
sum119895isin119873119894
i119895 +119873sum119894=1
V119879119894 V119894 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 +119873sum119894=1
V119879119894
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)]]= minus120572 119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)
(18)
Because 119886119894119895 = 119886119895119894 = 1 if (119894 119895) isin E we have
119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) = 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
= 12 [
[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)]]= 1
2 [[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119895119894V119879119895 sgn (V119895 minus V119894)]]= 1
2
sdot 119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
(19)
Thus (18) can be rewritten by
2 = minus1205722119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)(20)
If we let 119881 = (V1198791 V1198792 sdot sdot sdot V119879119873)119879 Φ = (1206011198791 1206011198792 sdot sdot sdot 120601119879119873)119879 thenthe above equation can be rewritten as
1 = minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 119881119879Φle minus120572
410038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 120572
4radic119881119879 (119863119863119879 otimes 119868119898) 119881+ 1198812 Φ2
le minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724radic1205822 (119871) 1198812 + 1198812 Φ2
= minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus (1205724radic1205822 (119871) minus Φ2) 1198812
(21)
Complexity 5
Let 120601 = nabla119891119894(V119894 119905) we know 120601 is upper bounded andΦ2 is upper bounded forall119905 gt 1199051 So if 120572 gt 4Φ1205822(119871) we canget
2 lt minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 = minus1205724119873sum119894=1
119873sum119895=1
119886119894119895 10038171003817100381710038171003817V119894 minus V119895100381710038171003817100381710038171 le 0 (22)
By LaSallersquos invariance principle we can get V1(119905) =V2(119905) = sdot sdot sdot = V119873(119905) isin Ω = ⋂119873119894=1Ω119894 as 119905 997888rarr infin which impliesthat the velocities of all agents in system (2) asymptoticallybecome the same
If we let V = (1119873)sum119873119894=1 V119894 from the above proof we canget V119894(119905) = V as 119905 997888rarr infin So for any 120576 gt 0 there exists a time119905120576 (119905120576 gt 1199051) such that V119894 V isin Ω and
1003817100381710038171003817V119894 minus V1003817100381710038171003817 lt 120576119873119872 (23)
forall119905 ge 119905120576From the convexity of the function119891119894 (V119894) and (15) we have119873sum119894=1
1003817100381710038171003817119891119894 (V) minus 119891119894 (V119894)1003817100381710038171003817 = 119873sum119894=1
100381710038171003817100381710038171003817[nabla119891119894 (V119894)]119879 (V minus V)100381710038171003817100381710038171003817
le 119873sum119894=1
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 (V minus V) lt 120576forall119905 ge 119905120576
(24)
So for all 119905 gt 119905120576 (14) and (24) holdFor 119905 gt 119905120576 denote
1198813 (119905) = 12119873sum119894=1
1003817100381710038171003817V119894 minus 119875119883 (V)10038171003817100381710038172 + 12119873sum119894=1
sum119895isin119873119894
119881119894119895 (25)
Similar to the proof of above we have
3 (119905) = minus120572 119873sum119894=1
sum119895isin119873119894
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
(V119894 minus 119875119883 (V))119879nabla119891119894 (V119894)
le 119873sum119894=1
(119875119883 (V) minus V119894)119879 nabla119891119894 (V119894)
le 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V119894)]
= 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]
= [119891 (119875119883 (V)) minus 119891 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]lt [119891 (119875119883 (V)) minus 119891 (V)] + 120576 le 120576
(26)
0 1 2 3 4 5 60
2
4
6
8
10
12
Figure 1 Shape of the bounded potential function 120595(119911)
In view of the arbitrariness of 120576 let 120576 997888rarr 0 we have 3(119905) lt[119891(119875119883(V)) minus 119891(V)] le 0 for 119905 gt 1199052 By LaSallersquos invarianceprinciple and the unique global minimum of 119891(V) on Ω wecan get lim119905997888rarrinfinV119894 minus 119875119883(V) = 0 That is the global costfunction (4) is minimized as 119905 997888rarr infin
Remark 9 Compared with the distributed optimization witha common constraint [18ndash20] we extended the control law todistributed optimization with local constraints Besides theresult of [8] requires time-varying gains of the gradients tosatisfy a persistence condition and the gains conditions ofthis paper are relatively easy to satisfy Compared with thecontrol law in [10 12] the control law this paper is relativelysimpleMoreover this paper addresses the issue of distributedoptimization problem having flocking and local constraintset
5 Simulation
In this section a numerical example is presented to verify thefeasibility of the proposed algorithm and correctness of ourtheoretical analysis
For giving the potential function119881119894119895 we choose the actionfunction 120601(119911) as follows
120601 (119911) =
119911 minus 119889120590radic1 + (119911 minus 119889120590)2
0 le 119911 lt 1198771205900 119900119905ℎ119890119903119908119894119904119890
(27)
which satisfies condition (2) in Definition 4The corresponding repulsive potential function is
120595 (119911) = int119911119889120590
120601 (119904) 119889119904 (28)
The following parameters remain fixed through the sim-ulation 119889 = 3 and 119877 = 5 The potential function 120595(119911) has theshape as in Figure 1
6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Complexity
+ 119892119894 (V119894))] = [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
minus 120590 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)100381710038171003817100381710038172 +119873sum119894=1
(V119894 minus 119875Ω119894 (V119894))119879 [119875Ω119894 (V119894)
+ 119892119894 (V119894))] le [119873119876 + 120572119873 minus 120573] 119873sum119894=1
10038171003817100381710038171003817(V119894 minus 119875Ω119894 (V119894))10038171003817100381710038171003817
+ 119873sum119894=1
10038171003817100381710038171003817V119894 minus 119875Ω119894 (V119894)10038171003817100381710038171003817 (119904 + 119892) = minus [120573 minus (119873119876 + 120572119873 + 119904
+ 119892)]radic1198811 (119905)(11)
In the above prove we have used the fact 119875Ω119894(V119894) isin Ω119894 and119875Ω119894(V119894) le 119904 From (11) it follows that
1 (119905)radic1198811 (119905) le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892)] (12)
We integrate on both sides of inequality and get the followinginequality
radic1198811 (119905) minus radic1198811 (1199050)le minus [120573 minus (119873119876 + 120572119873 + 119904 + 119892))] (119905 minus 1199050)
(13)
Thus 1198811(119905) converges to zero in finite time Namely there isa constant 1199051 gt 1199050 such that for all 119905 gt 1199051 V119894 minus 119875Ω(V119894) = 0That is under control (9) V119894(119905) isin Ω119894 for all 119905 gt 1199051
Second we will present the consensus analysis From theabove proof for all 119905 gt 1199051 we can get V119894(119905) isin Ω119894 and119894 (119905) = V119894 (119905)V119894 (119905) = minus sum
119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894) 119894 = 1 2 sdot sdot sdot 119873
(14)
From Assumption 3 we can get nabla119891119894(V119894) is continuousWhen Ω is a bounded closed convex set from the propertyof continuous functions on closed bounded sets we can getnabla119891119894(V119894) is upper bounded onΩ119894 So there is a constant 119872 gt 0such that
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 le 119872 forall119905 gt 1199051 (15)
For all 119905 gt 1199051 consider the Lyapunov function candidate
1198812 = 12119873sum119894=1
sum119895isin119873119894
119881119894119895 + 12119873sum119894=1
V119879119894 V119894 (16)
Note however that due to the symmetric nature of 11988111989411989512119873sum119894=1
sum119895isin119873119894
119894119895 = 12119873sum119894=1
sum119895isin119873119894
119879119894119895nabla119909119894119895119881119894119895 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 (17)
So taking time derivative of 1198812 we can get
2 = 12119873sum119894=1
sum119895isin119873119894
i119895 +119873sum119894=1
V119879119894 V119894 =119873sum119894=1
sum119895isin119873119894
V119879119894 nabla119909119894119881119894119895 +119873sum119894=1
V119879119894
sdot [[minus sum119895isin119873119894
nabla119909119894119881119894119895 minus 120572 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus nabla119891119894 (V119894)]]= minus120572 119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)
(18)
Because 119886119894119895 = 119886119895119894 = 1 if (119894 119895) isin E we have
119873sum119894=1
V119879119894 sum119895isin119873119894
119886119894119895 sgn (V119894 minus V119895) = 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
= 12 [
[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)]]= 1
2 [[119873sum119894=1
119873sum119895=1
119886119894119895V119879119894 sgn (V119894 minus V119895)
+ 119873sum119894=1
119873sum119895=1
119886119895119894V119879119895 sgn (V119895 minus V119894)]]= 1
2
sdot 119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
(19)
Thus (18) can be rewritten by
2 = minus1205722119873sum119894=1
119873sum119895=1
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
V119879119894 nabla119891119894 (V119894)(20)
If we let 119881 = (V1198791 V1198792 sdot sdot sdot V119879119873)119879 Φ = (1206011198791 1206011198792 sdot sdot sdot 120601119879119873)119879 thenthe above equation can be rewritten as
1 = minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 119881119879Φle minus120572
410038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 120572
4radic119881119879 (119863119863119879 otimes 119868119898) 119881+ 1198812 Φ2
le minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus 1205724radic1205822 (119871) 1198812 + 1198812 Φ2
= minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 minus (1205724radic1205822 (119871) minus Φ2) 1198812
(21)
Complexity 5
Let 120601 = nabla119891119894(V119894 119905) we know 120601 is upper bounded andΦ2 is upper bounded forall119905 gt 1199051 So if 120572 gt 4Φ1205822(119871) we canget
2 lt minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 = minus1205724119873sum119894=1
119873sum119895=1
119886119894119895 10038171003817100381710038171003817V119894 minus V119895100381710038171003817100381710038171 le 0 (22)
By LaSallersquos invariance principle we can get V1(119905) =V2(119905) = sdot sdot sdot = V119873(119905) isin Ω = ⋂119873119894=1Ω119894 as 119905 997888rarr infin which impliesthat the velocities of all agents in system (2) asymptoticallybecome the same
If we let V = (1119873)sum119873119894=1 V119894 from the above proof we canget V119894(119905) = V as 119905 997888rarr infin So for any 120576 gt 0 there exists a time119905120576 (119905120576 gt 1199051) such that V119894 V isin Ω and
1003817100381710038171003817V119894 minus V1003817100381710038171003817 lt 120576119873119872 (23)
forall119905 ge 119905120576From the convexity of the function119891119894 (V119894) and (15) we have119873sum119894=1
1003817100381710038171003817119891119894 (V) minus 119891119894 (V119894)1003817100381710038171003817 = 119873sum119894=1
100381710038171003817100381710038171003817[nabla119891119894 (V119894)]119879 (V minus V)100381710038171003817100381710038171003817
le 119873sum119894=1
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 (V minus V) lt 120576forall119905 ge 119905120576
(24)
So for all 119905 gt 119905120576 (14) and (24) holdFor 119905 gt 119905120576 denote
1198813 (119905) = 12119873sum119894=1
1003817100381710038171003817V119894 minus 119875119883 (V)10038171003817100381710038172 + 12119873sum119894=1
sum119895isin119873119894
119881119894119895 (25)
Similar to the proof of above we have
3 (119905) = minus120572 119873sum119894=1
sum119895isin119873119894
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
(V119894 minus 119875119883 (V))119879nabla119891119894 (V119894)
le 119873sum119894=1
(119875119883 (V) minus V119894)119879 nabla119891119894 (V119894)
le 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V119894)]
= 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]
= [119891 (119875119883 (V)) minus 119891 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]lt [119891 (119875119883 (V)) minus 119891 (V)] + 120576 le 120576
(26)
0 1 2 3 4 5 60
2
4
6
8
10
12
Figure 1 Shape of the bounded potential function 120595(119911)
In view of the arbitrariness of 120576 let 120576 997888rarr 0 we have 3(119905) lt[119891(119875119883(V)) minus 119891(V)] le 0 for 119905 gt 1199052 By LaSallersquos invarianceprinciple and the unique global minimum of 119891(V) on Ω wecan get lim119905997888rarrinfinV119894 minus 119875119883(V) = 0 That is the global costfunction (4) is minimized as 119905 997888rarr infin
Remark 9 Compared with the distributed optimization witha common constraint [18ndash20] we extended the control law todistributed optimization with local constraints Besides theresult of [8] requires time-varying gains of the gradients tosatisfy a persistence condition and the gains conditions ofthis paper are relatively easy to satisfy Compared with thecontrol law in [10 12] the control law this paper is relativelysimpleMoreover this paper addresses the issue of distributedoptimization problem having flocking and local constraintset
5 Simulation
In this section a numerical example is presented to verify thefeasibility of the proposed algorithm and correctness of ourtheoretical analysis
For giving the potential function119881119894119895 we choose the actionfunction 120601(119911) as follows
120601 (119911) =
119911 minus 119889120590radic1 + (119911 minus 119889120590)2
0 le 119911 lt 1198771205900 119900119905ℎ119890119903119908119894119904119890
(27)
which satisfies condition (2) in Definition 4The corresponding repulsive potential function is
120595 (119911) = int119911119889120590
120601 (119904) 119889119904 (28)
The following parameters remain fixed through the sim-ulation 119889 = 3 and 119877 = 5 The potential function 120595(119911) has theshape as in Figure 1
6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Complexity 5
Let 120601 = nabla119891119894(V119894 119905) we know 120601 is upper bounded andΦ2 is upper bounded forall119905 gt 1199051 So if 120572 gt 4Φ1205822(119871) we canget
2 lt minus1205724
10038171003817100381710038171003817119863119879119881100381710038171003817100381710038171 = minus1205724119873sum119894=1
119873sum119895=1
119886119894119895 10038171003817100381710038171003817V119894 minus V119895100381710038171003817100381710038171 le 0 (22)
By LaSallersquos invariance principle we can get V1(119905) =V2(119905) = sdot sdot sdot = V119873(119905) isin Ω = ⋂119873119894=1Ω119894 as 119905 997888rarr infin which impliesthat the velocities of all agents in system (2) asymptoticallybecome the same
If we let V = (1119873)sum119873119894=1 V119894 from the above proof we canget V119894(119905) = V as 119905 997888rarr infin So for any 120576 gt 0 there exists a time119905120576 (119905120576 gt 1199051) such that V119894 V isin Ω and
1003817100381710038171003817V119894 minus V1003817100381710038171003817 lt 120576119873119872 (23)
forall119905 ge 119905120576From the convexity of the function119891119894 (V119894) and (15) we have119873sum119894=1
1003817100381710038171003817119891119894 (V) minus 119891119894 (V119894)1003817100381710038171003817 = 119873sum119894=1
100381710038171003817100381710038171003817[nabla119891119894 (V119894)]119879 (V minus V)100381710038171003817100381710038171003817
le 119873sum119894=1
1003817100381710038171003817nabla119891119894 (V119894)1003817100381710038171003817 (V minus V) lt 120576forall119905 ge 119905120576
(24)
So for all 119905 gt 119905120576 (14) and (24) holdFor 119905 gt 119905120576 denote
1198813 (119905) = 12119873sum119894=1
1003817100381710038171003817V119894 minus 119875119883 (V)10038171003817100381710038172 + 12119873sum119894=1
sum119895isin119873119894
119881119894119895 (25)
Similar to the proof of above we have
3 (119905) = minus120572 119873sum119894=1
sum119895isin119873119894
119886119894119895 (V119894 minus V119895)119879 sgn (V119894 minus V119895)
minus 119873sum119894=1
(V119894 minus 119875119883 (V))119879nabla119891119894 (V119894)
le 119873sum119894=1
(119875119883 (V) minus V119894)119879 nabla119891119894 (V119894)
le 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V119894)]
= 119873sum119894=1
[119891119894 (119875119883 (V)) minus 119891119894 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]
= [119891 (119875119883 (V)) minus 119891 (V)] + 119873sum119894=1
[119891119894 (V) minus 119891119894 (V119894)]lt [119891 (119875119883 (V)) minus 119891 (V)] + 120576 le 120576
(26)
0 1 2 3 4 5 60
2
4
6
8
10
12
Figure 1 Shape of the bounded potential function 120595(119911)
In view of the arbitrariness of 120576 let 120576 997888rarr 0 we have 3(119905) lt[119891(119875119883(V)) minus 119891(V)] le 0 for 119905 gt 1199052 By LaSallersquos invarianceprinciple and the unique global minimum of 119891(V) on Ω wecan get lim119905997888rarrinfinV119894 minus 119875119883(V) = 0 That is the global costfunction (4) is minimized as 119905 997888rarr infin
Remark 9 Compared with the distributed optimization witha common constraint [18ndash20] we extended the control law todistributed optimization with local constraints Besides theresult of [8] requires time-varying gains of the gradients tosatisfy a persistence condition and the gains conditions ofthis paper are relatively easy to satisfy Compared with thecontrol law in [10 12] the control law this paper is relativelysimpleMoreover this paper addresses the issue of distributedoptimization problem having flocking and local constraintset
5 Simulation
In this section a numerical example is presented to verify thefeasibility of the proposed algorithm and correctness of ourtheoretical analysis
For giving the potential function119881119894119895 we choose the actionfunction 120601(119911) as follows
120601 (119911) =
119911 minus 119889120590radic1 + (119911 minus 119889120590)2
0 le 119911 lt 1198771205900 119900119905ℎ119890119903119908119894119904119890
(27)
which satisfies condition (2) in Definition 4The corresponding repulsive potential function is
120595 (119911) = int119911119889120590
120601 (119904) 119889119904 (28)
The following parameters remain fixed through the sim-ulation 119889 = 3 and 119877 = 5 The potential function 120595(119911) has theshape as in Figure 1
6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Complexity
Ω Ω
Ω
minus25 minus2 minus15 minus1 minus05 0minus25
minus2
minus15
minus1
minus05
0
8 1
vi1
v i2
Ω
Figure 2 The local constraint set Ω119894 and the intersectionΩ
Then we choose the potential function 119881119894119895 satisfyingDefinition 4 as follows
119881119894119895 = 120595 (10038171003817100381710038171003817119909119894 minus 11990911989510038171003817100381710038171003817120590) = int119909119894minus119909119895120590119889120590
120601 (119904) 119889119904 (29)
In the illustration we considered 119873 = 8 agents ina 2D plane The task of the multiagent is to enable theirvelocities to minimize the total cost function sum8119894=1 119891119894(V119894(119905))where V119894(119905) = (V1198941(119905) V1198942(119905))119879 is the coordinate of agent 119894We consider the second-order dynamic system (2) with thecontrol algorithm (9) The local cost functions are given by1198911(V1) = (12)V211+(12)V2121198912(V2) = (12)(V21+1)2+(12)V2221198913(V3) = (12)V231 + (12)(V32 + 1)2 1198914(V4) = (12)(V41 +1)2 + (12)(V42 + 1)2 1198915(V5) = (12)V251 + (12)V252 1198916(V6) =(12)(V61 + 1)4 + (12)V462 1198917(V7) = (12)V471 + (12)(V72 + 1)4and 1198918(V8) = (12)V481 + (12)(V82 +1)4 Those local functionsare used in [9] We assume that the local constraint set is asquare which is given byΩ119894 = V isin R2 minus2 minus (119894 minus 1) lowast 005 leV119894119895 le minus06 minus (119894 minus 7) lowast 005 119894 isin N 119895 = 1 2 It is observedfrom the above local cost functions and local constraint setthat Assumption 3 is satisfied Figures of the local constraintsetΩ119894 and the intersection Ω are plotted in Figure 2Throughsimple calculations we have that the global function 119891(V) =sum8119894=1 119891119894(V) is minimized if and only if V = [minus05 minus 05]119879 SinceV = [minus05minus05]119879 notin Ω the objection function (4) must have atleast one optimal point at the boundary of Ω By calculatingthe values of 119891(V) = sum8119894=1 119891119894(V) along the constraint set Ωwe have that Vlowast = [minus06 minus06]119879 is the optimal points of theobjective function (4)
The simulation results are shown in Figures 3ndash5 Forsimplicity we choose the coefficients in algorithm (9) as 120572 =1 120573 = 20 Figure 3 demonstrates the initial state of the groupincluding initial positions and velocities All initial positionsare set on a line and all initial velocities are set with arbitrarydirections and magnitudes within the range of [minus1 1] msFigure 4 gives the final steady state configuration and the finalvelocity of the agent group where the solid lines represent the
minus26 minus24 minus22 minus2 minus18 minus16 minus14 minus12 minus1minus01
minus005
0
005
01
015
x
y
Figure 3 Initial configuration of all agents
minus6 minus55 minus5 minus45minus36
minus34
minus32
minus3
minus28
minus26
x
y
Figure 4 Final configuration of all agents
0 1 2 3 4 5minus2
minus1
minus06
0
1
2
t
velo
citie
s of a
gent
s vi
vi1vi2minus06
Figure 5 Velocities of all agents
Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Complexity 7
neighboring relations between agents and the dotted arrowsrepresent the velocities of all agents Figure 5 plots the velocityV119894 119894 isin N It is easy to see that the flocking motion canbe obtained and the velocities of all agents converge to thevelocity of the optimal velocity
6 Conclusion
We studied distributed optimization with flocking and con-straint set in this paper Multiagent systems with continuous-time and second-order dynamics are considered Each agenthas a local constraint set and a local objective functionwhich is known to only one agent The objective is formultiple agents to optimize a sum of the local functionswith local interaction and information First a boundedpotential function to construct the controller is given and thedistributed constrained optimization algorithm is presentedthat make all agents avoid collisions during the evolutionThen it is proved that all agents can track the optimal velocitywhile avoiding the interagent collision The proof of the mainresult is divided into three steps global set convergenceconsensus analysis and optimal set convergence Finally asimulation is included to illustrate the results
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by National Natural Science Founda-tion of China (61573199) and Basic Research Projects of HighEducation (3122015C025)
References
[1] A Nedic and A Ozdaglar ldquoDistributed subgradient methodsfor multi-agent optimizationrdquo IEEE Transactions on AutomaticControl vol 54 no 1 pp 48ndash61 2009
[2] JWang andN Elia ldquoControl approach to distributed optimiza-tionrdquo in Proceedings of the 48th Annual Allerton Conference onCommunication Control andComputing (Allerton rsquo10) pp 557ndash561 2010
[3] S Rahili and W Ren ldquoDistributed continuous-time convexoptimization with time-varying cost functionsrdquo Institute ofElectrical and Electronics Engineers Transactions on AutomaticControl vol 62 no 4 pp 1590ndash1605 2017
[4] Y Zhao Y Liu GWen andG Chen ldquoDistributed optimizationfor linear multiagent systems edge- and node-based adaptivedesignsrdquo Institute of Electrical and Electronics Engineers Trans-actions on Automatic Control vol 62 no 7 pp 3602ndash3609 2017
[5] Z Yang Q Zhang and Z Chen ldquoAdaptive distributed convexoptimization for multi-agent and its application in flockingbehaviorrdquo Journal of The Franklin Institute 2018
[6] Y A Nedic A Ozdaglar and P A Parrilo ldquoConstrainedconsensus and optimization in multi-agent networksrdquo IEEE
Transactions on Automatic Control vol 55 no 4 pp 922ndash9382010
[7] M Zhu and S Martinez ldquoOn distributed convex optimizationunder inequality and equality constraintsrdquo IEEE Transactionson Automatic Control vol 57 no 1 pp 151ndash164 2012
[8] Z Qiu S Liu and L Xie ldquoDistributed constrained optimalconsensus ofmulti-agent systemsrdquoAutomatica vol 68 pp 209ndash215 2016
[9] P Lin W Ren and J A Farrel ldquoDistributed continuous-time optimization nonuniform gradient gains finite-time con-vergence and convex constraint setrdquo IEEE Transactions onAutomatic Control 2016
[10] X Zeng P Yi and Y Hong ldquoDistributed continuous-timealgorithm for constrained convex optimizations via nonsmoothanalysis approachrdquo Institute of Electrical and Electronics Engi-neers Transactions on Automatic Control vol 62 no 10 pp5227ndash5233 2017
[11] P Lin andW Ren ldquoDistributed optimization with nonuniformunbounded convex constraint sets and nonuniform step-sizesrdquohttpsarxivorgabs170308898 2017
[12] Q Liu and J Wang ldquoA second-order multi-agent network forbound-constrained distributed optimizationrdquo IEEE Transac-tions on Automatic Control vol 60 no 12 pp 3310ndash3315 2015
[13] J Li C Gu Z Wu and C Wu ldquoDistributed OptimizationMethods for Nonconvex Problems with Inequality Constraintsover Time-Varying Networksrdquo Complexity vol 2017 Article ID3610283 10 pages 2017
[14] G Zhang andR Heusdens ldquoDistributed optimization using theprimal-dualmethod ofmultipliersrdquo IEEETransactions on Signaland Information Processing over Networks vol 4 no 1 pp 173ndash187 2018
[15] M Hong J D Lee and M Razaviyayn ldquoGradient Primal-Dual Algorithm Converges to Second-Order StationarySolutions for Nonconvex Distributed Optimizationrdquohttpsarxivorgpdf180208941pdf 2018
[16] C Gu ZWu and J Li ldquoDistributed Regularized Dual GradientAlgorithm for Constrained Convex Optimization over Time-Varying DirectedGraphsrdquo httpsarxivorgpdf180509148pdf2018
[17] S Rahili W Ren and P Lin ldquoDistributed convex optimizationof time-varying cost functions for double-integrator systemsusing nonsmooth algorithmsrdquo in Proceedings of the AmericanControl Conference (ACC rsquo15) 2015
[18] E Shaw ldquoFish in schoolsrdquo Journal of Natural History vol 84 no8 pp 40ndash45 1975
[19] T Vicsek A Czirk E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[20] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[21] R Olfati-Saber ldquoFlocking for multi-agent dynamic systemsalgorithms and theoryrdquo IEEE Transactions on Automatic Con-trol vol 51 no 3 pp 401ndash420 2006
[22] H G Tanner A Jadbabaie and G J Pappas ldquoFlocking infixed and switching networksrdquo IEEE Transactions on AutomaticControl vol 52 no 5 pp 863ndash868 2007
[23] H Su X Wang and G Chen ldquoA connectivity-preservingflocking algorithm for multi-agent systems based only on
8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Complexity
position measurementsrdquo International Journal of Control vol82 no 7 pp 1334ndash1343 2009
[24] M Wang H Su M Zhao M Z Q Chen and H WangldquoFlocking of multiple autonomous agents with preserved net-work connectivity and heterogeneous nonlinear dynamicsrdquoNeurocomputing vol 115 pp 169ndash177 2013
[25] Z Yang Q Zhang and Z Chen ldquoFlocking of multi-agents withnonlinear inner-coupling functionsrdquo Nonlinear Dynamics vol60 no 3 pp 255ndash264 2010
[26] J-P Aubin andACellinaDifferential Inclusions Springer 1984[27] S Boyd andLVandenbergheConvexOptimization Cambridge
University Press 2004
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom