Embed Size (px)
Citation preview

DISEÑO DE UN SISTEMA EXTENSIBLE PARA MODIFICACIÓN DE L EMPUJE VECTORIAL DE LA TOBERA DE UN COHETE EXPERIMENTAL DE
PROPELENTES LÍQUIDOS
ANGEL GUSTAVO ANDRADE LOPEZ ANGEL FABIAN HERRERA AFANADOR
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTO DE AUTOMATICA Y ELECTRONICA PROGRAMA INGENIERÍA MECATRONICA
SANTIAGO DE CALI 2008
2
DISEÑO DE UN SISTEMA EXTENSIBLE PARA MODIFICACIÓN DE L EMPUJE VECTORIAL DE LA TOBERA DE UN COHETE EXPERIMENTAL DE
PROPELENTES LÍQUIDOS
ANGEL GUSTAVO ANDRADE LOPEZ ANGEL FABIAN HERRERA AFANADOR
Pasantía para optar al título de Ingeniero Mecatrónico
Director DRAGO DUŠIĆ
Ingeniero Mecatrónico
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTO DE AUTOMATICA Y ELECTRONICA PROGRAMA INGENIERÍA MECATRONICA
SANTIAGO DE CALI 2008
3
Nota de aceptación:
Aprobado por el Comité de Grado en cumplimiento de los requisitos exigidos por la Universidad Autónoma de Occidente para optar al título de Ingeniero Mecatrónico
ANDRES NAVAS____ Jurado o Docente o Director
Santiago de Cali, Julio 28 de 2008
4
AGRADECIMIENTOS
Ingeniero JAIME AGUILAR, Director del CITA, Fuerza Aérea Colombiana. Ingeniero DIEGO ALMARIO, Director de Ingeniería Mecatrónica, Universidad Autónoma de Occidente. Ingeniero DRAGO DUSSICH, Docente hora cátedra, Universidad Autónoma de Occidente
5
CONTENIDO Pág. RESUMEN 13 INTRODUCCIÓN 14 1. PLANTEAMIENTO DE LA MISION 15 1.1 DESCRIPCION DEL PRODUCTO 15
1.2 PRINCIPALES OBJETIVOS DE MARKETING 15 1.3 MERCADO PRIMARIO Y SECUNDARIO 15 1.4 PREMISAS Y RESTRICCIONES 15 2. OBJETIVOS 16 2.1 GENERAL 16 2.2 ESPECIFICOS 16 3. PLANTEAMIENTO E IDENTIDFICACION 17 3.1 NECESIDADES DEL USUARIO 17 3.2 JERARQUIZACION DEL LAS NECESIDADES 18 3.3 METRICAS Y UNIDADES 18 3.4 RELACION METRICAS Y NECESIDADES 19 4. ESPECIFICACIONES PRELIMINARES DEL PRODUCTO 20 5. GENERACION DE CONCEPTOS 21 5.1 CLARIFICAR EL PROBLEMA 21 5.1.1 Caja negra 21
6
5.1.2 Diagrama funcional 22 5.2 BUSQUEDA EXTERNA 23 5.3 BUSQUEDA INTERNA 24 5.4 EXPLORACION SISTEMATICA 25 5.4.1 Árbol de clasificación de conceptos 26 5.4.2 Tabla de combinación de conceptos 31 5.4.3 Descripción concepto A 32 5.4.4 Descripción concepto B 33 5.4.5 Descripción concepto C 34 5.4.6 Descripción concepto D 35 5.4.7 Descripción concepto E 36 5.4.8 Descripción concepto F 37 6. SELECCIÓN DE CONCEPTOS 38 6.1 MATRIZ DE TAMIZAJE 38 6.2 MATRIZ PARA EVALUAR CONCEPTOS 39 7. DISEÑO A NIVEL DE SISTEMA 40 7.1 ANALISIS DE LA ARQUITECTURA DEL PRODUCTO 40 7.2 ESQUEMA DEL PRODUCTO 42 7.3 DISTRIBUCION GEOMETRICA 43 7.4 IDENTIFICAION DE INTERACCIONES INCIDENTALES 44 8. DISEÑO INDUSTRIAL 45
7
8.1 VALORACION DEL DISEÑO INDUSTRIAL 45 8.1.1 Necesidades ergonómicas 45 8.1.2 Necesidades estéticas 46 8.2 DOMINADO POR LA TECNOLOGIA O POR EL USUARIO 47 9. DISEÑO PARA MANUFACTURA 48 9.1 ANALISIS DEL DISEÑO PARA MANUFACTURA 48 10. PROTOTIOPADO 50 10.1 TIPOS DE PROTOTIPOS 50 11. DISEÑO DETALLADO 51 11.1 DISEÑÓ MECÁNICO DE LA ESTRUCTURA Y MECANISMOS 51 11.1.1 Mecanismo de sujeción y desplazamiento de la tobera extensible 51 11.1.2 Sistema de tobera extensible 61 11.1.3 Sistema de modificación del empuje vectorial. 63 11.2 SELECCIÓN DE ACTUADORES 64 11.3 ANALISIS DE LA ESTRUCTURA EN ALGOR 67 12 CONCLUSIONES 75 BIBLIOGRAFIA 76 ANEXOS 78
8
LISTA DE TABLAS Pág. Tabla 1 . Necesidades identificadas 17 Tabla 2 . Jerarquización de las necesidades 18 Tabla 3. Métricas y unidades 18 Tabla 4. Relación entre métricas y necesidades 19 Tabla 5. Asignación de valores ideales 20 Tabla 6. Matriz de tamizaje 38 Tabla 7. Matriz para evaluar conceptos 39 Tabla 8. Características tornillo de bolas 54 Tabla 9. Características tuercas de sujeción tornillo de bolas 55 Tabla 10. Tabla de las longitudes primitivas: 58 Tabla 11. Tabla de longitudes de correas dentadas 58 Tabla 12. Tabla comparativa motor DC sin y con escobillas 66 Tabla 13. Tabla características técnicas motor Dunkermorten 67
9
LISTA DE FIGURAS
Pág. Figura 1. Caja negra 22 Figura 2. Diagrama funcional 22 Figura 3. Motor con tobera recogida. Pratt & Whitney Rocketdyne RL10B-2 24 Figura 4. Fuente de alimentación 26 Figura 5. Generación de movimiento 27 Figura 6. Sistema de extensión 28 Figura 7. Modificación del empuje vectorial 29 Figura 8. Sistema de ajuste entre secciones 30 Figura 9. Tabla de combinación de conceptos 31 Figura 10. Concepto A 32 Figura 11. Bosquejo Concepto A 32 Figura 12. Concepto B 33 Figura 13. Concepto C 34 Figura 14. Bosquejo Concepto C 34
Figura 15. Concepto D 35 Figura 16. Bosquejo Concepto D 35 Figura 17. Concepto E 36 Figura 18. Bosquejo Concepto E 36 Figura 19. Concepto F 37 Figura 20. Bosquejo Concepto F 37
10
Figura 21. Análisis de la arquitectura del producto 40 Figura 22. Arquitectura del producto 41 Figura 23. Esquema del producto 42 Figura 24. Grupo de elementos a conjuntos 42 Figura 25. Distribución espacial de los diferentes bloques funcionales 43 Figura 26. Diagrama de interacciones incidentales 44 Figura 27. Necesidades ergonómicas 46 Figura 28. Necesidades estéticas 46 Figura 29. Dominio de la tecnología 47 Figura 30 . Entrada y salida sistema para manufactura 49 Figura 31. Prototipo virtual 50 Figura 32. Mecanismo de sujeción y desplazamiento de la tobera extensible 51 Figura 33. Husillo de bolas típico 52 Figura 34. Eficiencia tornillo de bolas vs tornillo de potencia. 52
Figura 35. Mecanismo desplazamiento husillo de bolas 53 Figura 36. Esquema Husillo de bolas 54 Figura 37. Mecanismo correa dentada – engranaje 56 Figura 38. Vista sistema de movimiento tobera extensible 56 Figura 39. Vista motor que mueve la tobera extensible 56 Figura 40. Perfil de los dientes 57
Figura 41. Engranaje 60 Figura 42, Soporte mecanismo de sujeción 60 Figura 43, Modelo de pieza tobera extensible 61
11
Figura 44, Modelo sistema de modificación de empuje vectorial 63 Figura 45. Sistema de direccionamiento aletas 64 Figura 46. Modelo motor DC 65 Figura 47. Motor Dunkermotoren referencia BG 75, 220 - 530 W 66 Figura 48. Dimensiones motor Dunkermotoren referencia BG 75 67 Figura 49. Prueba de Von Mises en ALGOR sistema completo (3mm) 68 Figura 50. Prueba de Von Mises en ALGOR soporte sistema extensible (3mm) 68 Figura 51. Prueba de Von Mises en ALGOR aletas (3mm) 69 Figura 52. Prueba de Von Mises en ALGOR sistema completo (6mm) 69 Figura 53. Prueba de Von Mises en ALGOR soporte sistema extensible (6mm) 68 Figura 54. Prueba de Von Mises en ALGOR tobera extensible (6mm) 69 Figura 55. Prueba de Von Mises en ALGOR aletas (6mm) 70 Figura 56. Prueba de Tresca en ALGOR tobera extensible 71 Figura 57. Prueba de Tresca en ALGOR aletas 72 Figura 58. Prueba de Tresca en ALGOR soporte sistema extensible 73 Figura 59. Prueba de Tresca en ALGOR sistema completo 73 Figura 60. Prueba de Tresca en ALGOR sistema completo con fuerza de empuje 74 Figura 61. Prueba de Von Mises en ALGOR sistema completo con fuerza de empuje 74
12
LISTA DE ANEXOS Pág. Anexo A. Planos de piezas 77
13
RESUMEN En la carrera por la conquista del espacio, muchos países de América latina han comenzado a invertir en la investigación y el desarrollo de tecnologías aeroespaciales que permitan estar a la vanguardia de los países más desarrollados en este campo. Por ello nuestro país, Colombia, la Fuerza Aérea Colombiana y las universidades, están desarrollando un proyecto ambicioso y de gran extensión tecnológica que nos permita explorar el campo aeroespacial, mediante el diseño y construcción de un cohete experimental de baja orbita, el cual será puesto en órbita gracias a la colaboración de un gran talento científico y humano de nuestros académicos y militares. Por esta razón es importante el estudio y desarrollo de diferentes alternativas que permitan garantizar el cumplimiento de dicho objetivo, por ello en el presente trabajo se propone el Diseño de un sistema extensible para modificación del empuje vectorial de la tobera de un cohete experimental de propelentes líquidos, el cual es una alternativa diferente al modelo existente de tobera fija. En este documento se muestran las diferentes fases del proceso de diseño mecatrónico aplicadas para lograr el objetivo principal, las cuales conllevaron al estudio, análisis e identificación de necesidades. Además se muestra el diseño detallado en donde se especifican las partes y mecanismos del sistema, la selección de los componentes y actuadores, mostrando los planos de piezas y ensamble para la posterior elaboración de los mismos.
14
INTRODUCCIÓN En el desarrollo del proyecto del cohete experimental de propelentes líquidos que viene adelantando la fuerza aérea colombiana se han estudiado diferentes alternativas con miras a optimizar el diseño y minimizar todo riesgo en la misión. Con este fin ha surgido la idea de diseñar un sistema que permita a la tobera del cohete extender su longitud para garantizar que el flujo de gases combustibles expulsados a través de ella a una determinada altitud no se expanda demasiado causando inestabilidad en el mismo. Además al diseño propuesto de tobera extensible se ha adicionado a este un mecanismo que permite la modificación del empuje vectorial sobre el cohete, garantizado aún más su estabilidad y controlabilidad. Para realizar este proyecto de diseño se utilizó la metodología del diseño concurrente, en donde nos enfrentamos a ciertas dificultades tales como la carencia de información respecto a los diseños de toberas extensibles por parte de grandes empresas extranjeras. Por tal razón el diseño adaptativo fue nuestra mejor opción. Se optó por realizar un diseño que satisfacía las necesidades del cliente elaborando para ello diversos cuadros comparativos y diagramas que permitieron llegar a este diseño. Se realizaron cálculos de esfuerzos y deformaciones de material, también se seleccionaron los componentes adecuados y se entregaron los planos correspondientes para su posterior aprobación y construcción.
15
1. PLANTEAMIENTO DE LA MISION 1.1. DESCRIPCION DEL PRODUCTO Diseño de un sistema extensible para modificación del empuje vectorial de la tobera de un cohete experimental de propelentes líquidos 1.2 PRINCIPALES OBJETIVOS DE MARKETING Incursionar el diseño de toberas extensibles para cohetes de propelentes líquidos en el país. 1.3 MERCADO PRIMARIO Y SECUNDARIO
Fuerza Aérea Colombiana (FAC). 1.4 PREMISAS Y RESTRICCIONES
• Facilidad de acople con el sistema actual. • Facilidad de controlar el mecanismo. • Seguridad del mecanismo. • Sencillez en el sistema de extensión.
16
2. OBJETIVOS 2.1 GENERAL Diseñar un sistema extensible para modificación del empuje vectorial de la tobera de un cohete experimental de propelentes líquidos. 2.2 ESPECIFICOS • Diseñar el mecanismo necesario para el posicionamiento de la tobera incluyendo los materiales y las dimensiones de cada uno de sus componentes. • Seleccionar los actuadores adecuados para que el mecanismo sea capaz de controlar y estabilizar al cohete. • Diseñar un sistema que permita la modificación del empuje vectorial
17
3. PLANTEAMIENTO E IDENTIFICACION
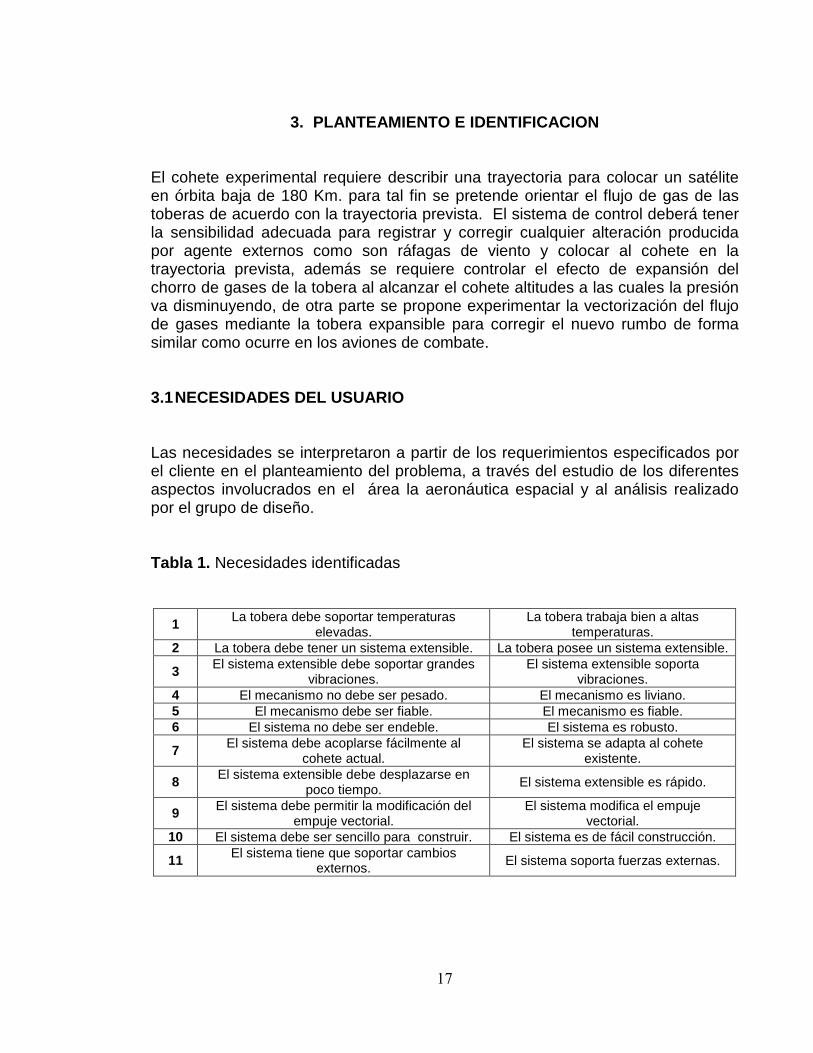
El cohete experimental requiere describir una trayectoria para colocar un satélite en órbita baja de 180 Km. para tal fin se pretende orientar el flujo de gas de las toberas de acuerdo con la trayectoria prevista. El sistema de control deberá tener la sensibilidad adecuada para registrar y corregir cualquier alteración producida por agente externos como son ráfagas de viento y colocar al cohete en la trayectoria prevista, además se requiere controlar el efecto de expansión del chorro de gases de la tobera al alcanzar el cohete altitudes a las cuales la presión va disminuyendo, de otra parte se propone experimentar la vectorización del flujo de gases mediante la tobera expansible para corregir el nuevo rumbo de forma similar como ocurre en los aviones de combate. 3.1 NECESIDADES DEL USUARIO
Las necesidades se interpretaron a partir de los requerimientos especificados por el cliente en el planteamiento del problema, a través del estudio de los diferentes aspectos involucrados en el área la aeronáutica espacial y al análisis realizado por el grupo de diseño. Tabla 1. Necesidades identificadas
1 La tobera debe soportar temperaturas elevadas.
La tobera trabaja bien a altas temperaturas.
2 La tobera debe tener un sistema extensible. La tobera posee un sistema extensible.
3 El sistema extensible debe soportar grandes vibraciones.
El sistema extensible soporta vibraciones.
4 El mecanismo no debe ser pesado. El mecanismo es liviano. 5 El mecanismo debe ser fiable. El mecanismo es fiable. 6 El sistema no debe ser endeble. El sistema es robusto.
7 El sistema debe acoplarse fácilmente al cohete actual.
El sistema se adapta al cohete existente.
8 El sistema extensible debe desplazarse en poco tiempo.
El sistema extensible es rápido.
9 El sistema debe permitir la modificación del empuje vectorial.
El sistema modifica el empuje vectorial.
10 El sistema debe ser sencillo para construir. El sistema es de fácil construcción.
11 El sistema tiene que soportar cambios externos. El sistema soporta fuerzas externas.
18
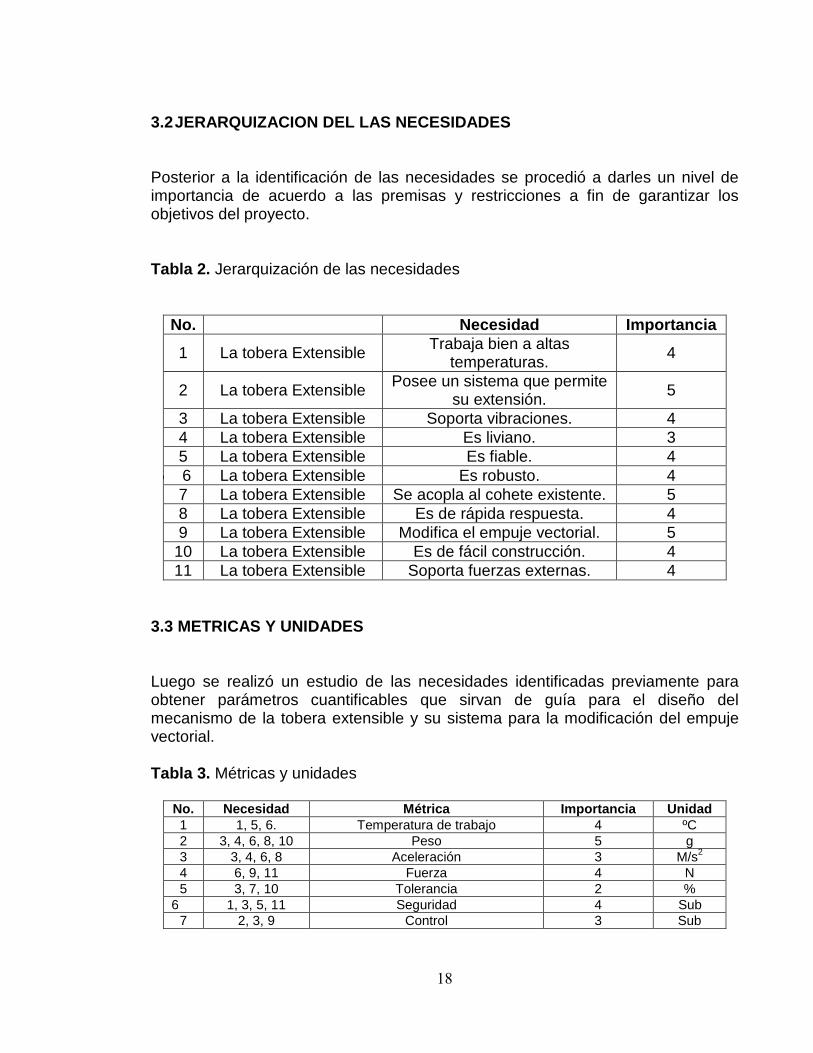
3.2 JERARQUIZACION DEL LAS NECESIDADES
Posterior a la identificación de las necesidades se procedió a darles un nivel de importancia de acuerdo a las premisas y restricciones a fin de garantizar los objetivos del proyecto. Tabla 2. Jerarquización de las necesidades
No. Necesidad Importancia
1 La tobera Extensible Trabaja bien a altas temperaturas.
4
2 La tobera Extensible Posee un sistema que permite su extensión.
5
3 La tobera Extensible Soporta vibraciones. 4 4 La tobera Extensible Es liviano. 3 5 La tobera Extensible Es fiable. 4
66 6 La tobera Extensible Es robusto. 4 7 La tobera Extensible Se acopla al cohete existente. 5 8 La tobera Extensible Es de rápida respuesta. 4 9 La tobera Extensible Modifica el empuje vectorial. 5
10 La tobera Extensible Es de fácil construcción. 4 11 La tobera Extensible Soporta fuerzas externas. 4
3.3 METRICAS Y UNIDADES Luego se realizó un estudio de las necesidades identificadas previamente para obtener parámetros cuantificables que sirvan de guía para el diseño del mecanismo de la tobera extensible y su sistema para la modificación del empuje vectorial. Tabla 3. Métricas y unidades
No. Necesidad Métrica Importancia Unidad 1 1, 5, 6. Temperatura de trabajo 4 ºC 2 3, 4, 6, 8, 10 Peso 5 g 3 3, 4, 6, 8 Aceleración 3 M/s2
4 6, 9, 11 Fuerza 4 N 5 3, 7, 10 Tolerancia 2 %
66 6 1, 3, 5, 11 Seguridad 4 Sub 7 2, 3, 9 Control 3 Sub
19
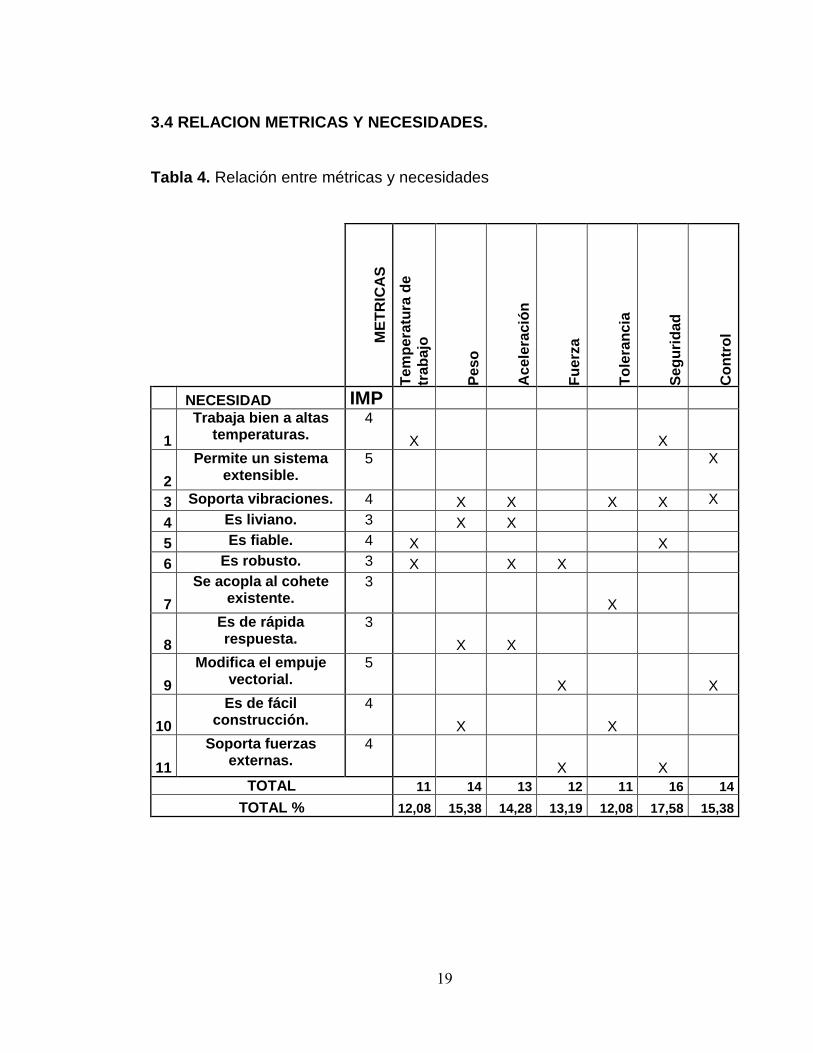
3.4 RELACION METRICAS Y NECESIDADES. Tabla 4. Relación entre métricas y necesidades
M
ET
RIC
AS
Tem
pera
tura
de
trab
ajo
Pes
o
Ace
lera
ción
Fue
rza
Tol
eran
cia
Seg
urid
ad
Con
trol
NECESIDAD IMP
1
Trabaja bien a altas temperaturas.
4
X X
2
Permite un sistema extensible.
5
X
3 Soporta vibraciones. 4 X X X X X
4 Es liviano. 3 X X
5 Es fiable. 4 X X
6 Es robusto. 3 X X X
7
Se acopla al cohete existente.
3
X
8
Es de rápida respuesta.
3
X X
9
Modifica el empuje vectorial.
5
X X
10
Es de fácil construcción.
4
X X
11
Soporta fuerzas externas.
4
X X TOTAL 11 14 13 12 11 16 14
TOTAL % 12,08 15,38 14,28 13,19 12,08 17,58 15,38
20
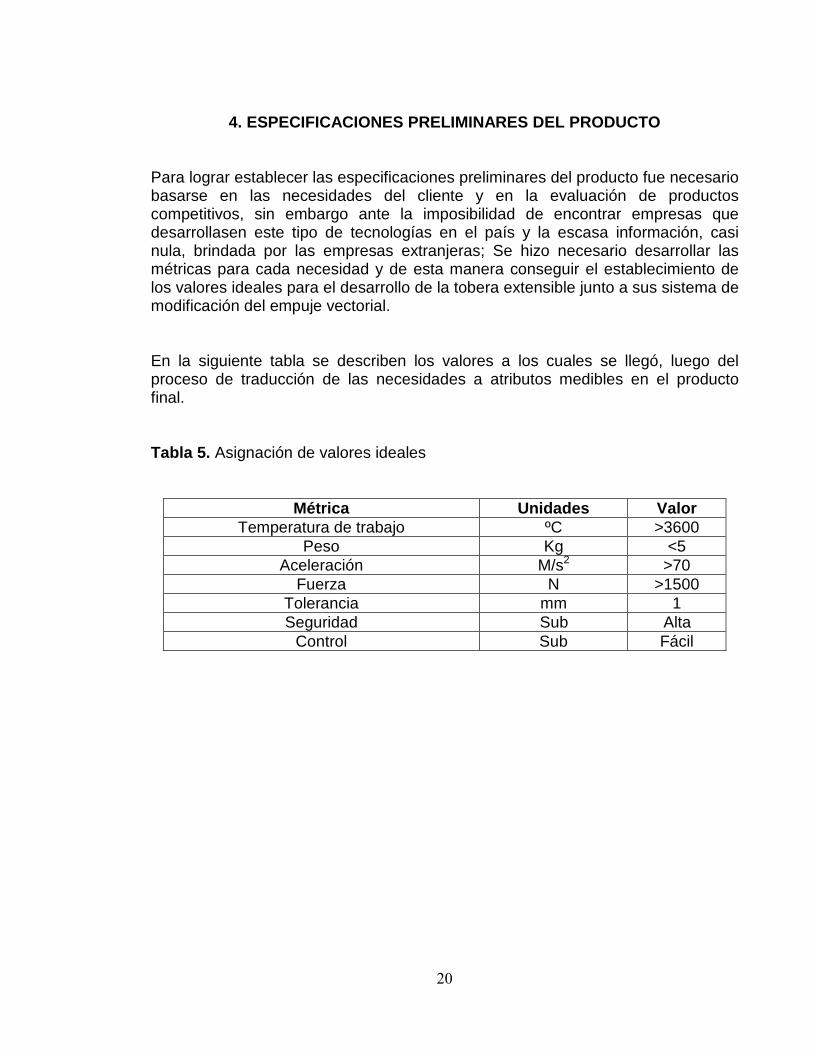
4. ESPECIFICACIONES PRELIMINARES DEL PRODUCTO Para lograr establecer las especificaciones preliminares del producto fue necesario basarse en las necesidades del cliente y en la evaluación de productos competitivos, sin embargo ante la imposibilidad de encontrar empresas que desarrollasen este tipo de tecnologías en el país y la escasa información, casi nula, brindada por las empresas extranjeras; Se hizo necesario desarrollar las métricas para cada necesidad y de esta manera conseguir el establecimiento de los valores ideales para el desarrollo de la tobera extensible junto a sus sistema de modificación del empuje vectorial. En la siguiente tabla se describen los valores a los cuales se llegó, luego del proceso de traducción de las necesidades a atributos medibles en el producto final. Tabla 5. Asignación de valores ideales
Métrica Unidades Valor Temperatura de trabajo ºC >3600
Peso Kg <5 Aceleración M/s2 >70
Fuerza N >1500 Tolerancia mm 1 Seguridad Sub Alta
Control Sub Fácil
21
5. GENERACION DE CONCEPTOS
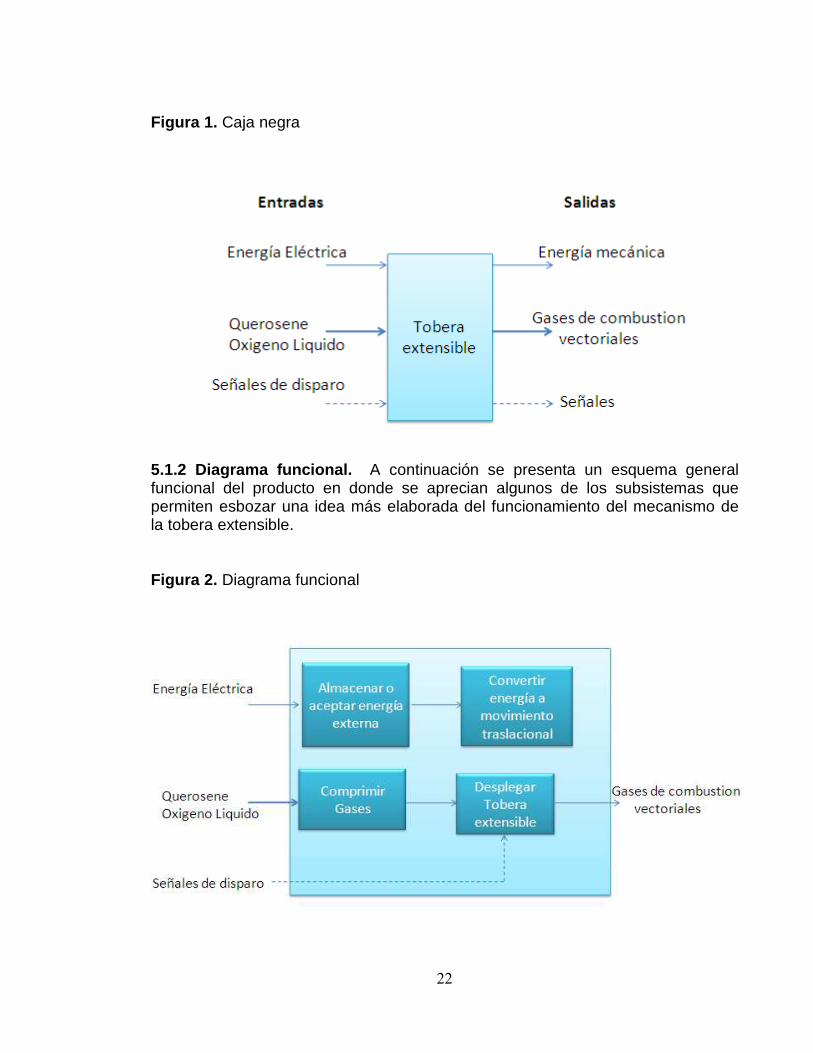
5.1 CLARIFICAR EL PROBLEMA � Descripción del producto • Diseño adaptativo de una tobera extensible para cohete de propelentes líquidos. � Necesidades • Es ligero. • Es de accionamiento rápido. • Es resistente a las altas temperaturas. • Soporta fuerzas externas. • Es seguro. � Especificaciones • Largo de la tobera recogida 30 cm. • Largo de la tobera extendida 60 cm. • Base de la tobera recogida 13 cm. • Base de la tobera extendida 30 cm. • Garganta de la tobera 3 cm. 5.1.1 Caja negra. En esta primera figura se afronta al problema como una caja negra a la cual lo único que se le conoce son algunas de las entradas y salidas que la afectan. Esto facilita la comprensión del problema en toda su dimensión y nos conduce a la siguiente etapa que consiste en realizar una descomposición funcional del problema.
22
Figura 1. Caja negra
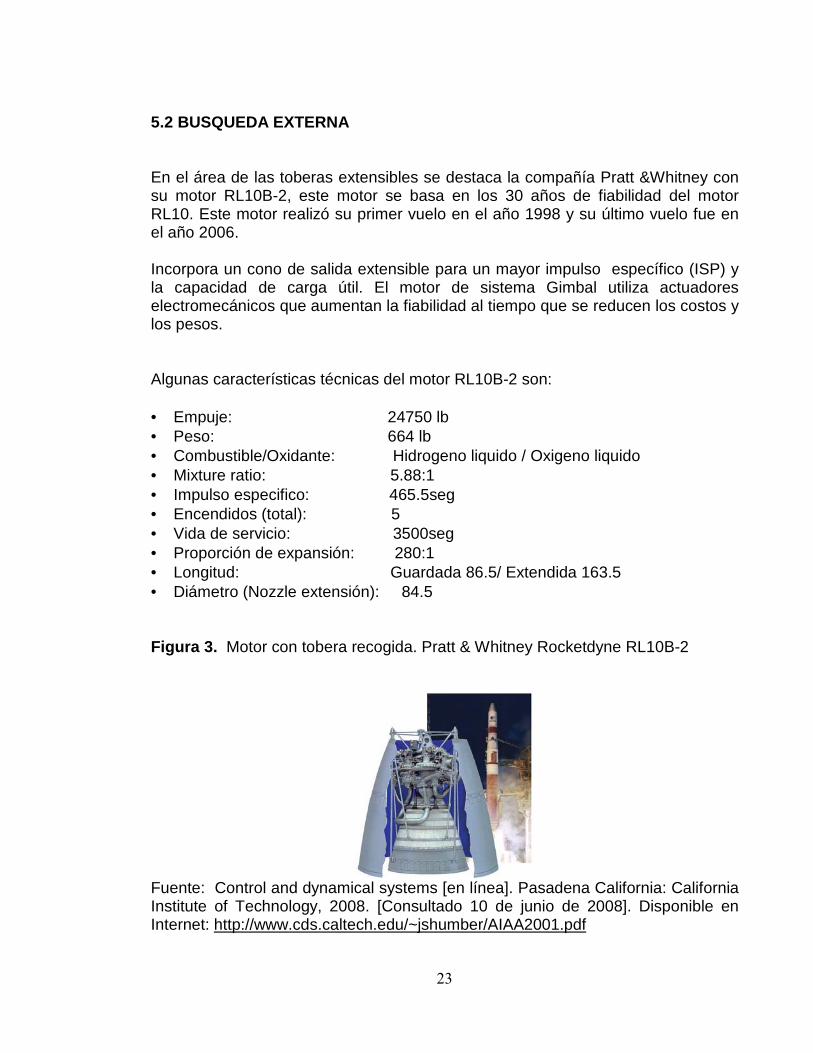
5.1.2 Diagrama funcional. A continuación se presenta un esquema general funcional del producto en donde se aprecian algunos de los subsistemas que permiten esbozar una idea más elaborada del funcionamiento del mecanismo de la tobera extensible. Figura 2. Diagrama funcional
23
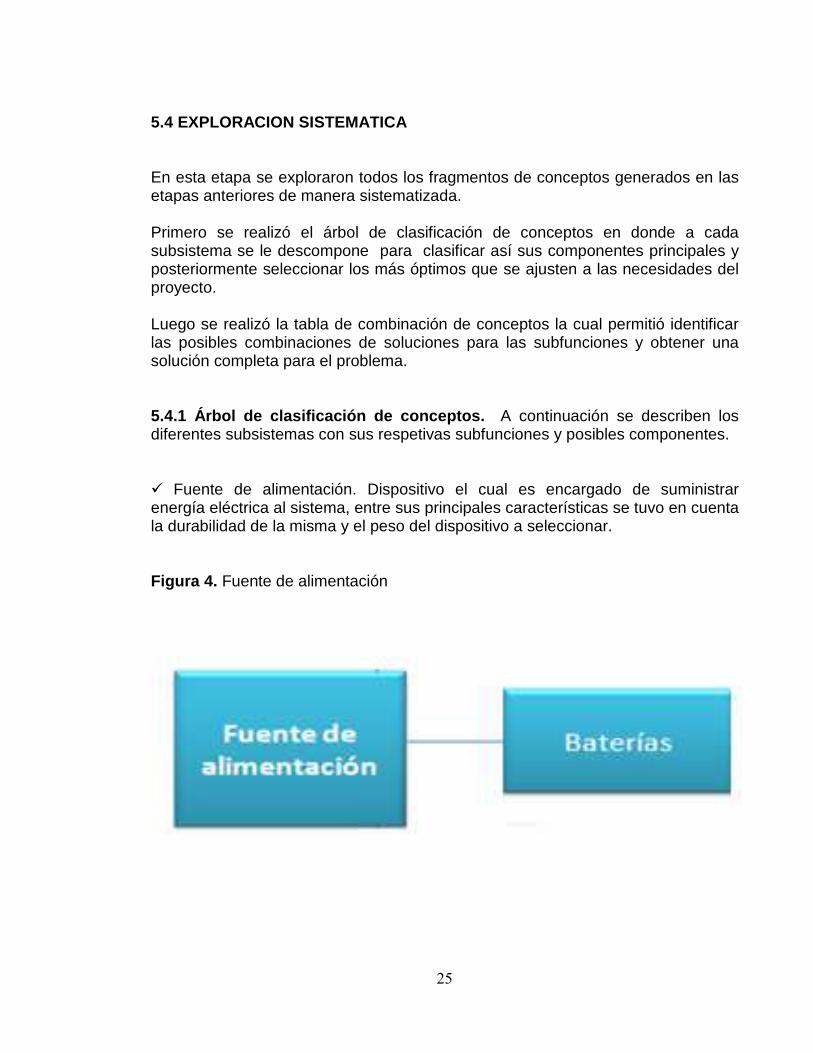
5.2 BUSQUEDA EXTERNA En el área de las toberas extensibles se destaca la compañía Pratt &Whitney con su motor RL10B-2, este motor se basa en los 30 años de fiabilidad del motor RL10. Este motor realizó su primer vuelo en el año 1998 y su último vuelo fue en el año 2006. Incorpora un cono de salida extensible para un mayor impulso específico (ISP) y la capacidad de carga útil. El motor de sistema Gimbal utiliza actuadores electromecánicos que aumentan la fiabilidad al tiempo que se reducen los costos y los pesos. Algunas características técnicas del motor RL10B-2 son: • Empuje: 24750 lb • Peso: 664 lb • Combustible/Oxidante: Hidrogeno liquido / Oxigeno liquido • Mixture ratio: 5.88:1 • Impulso especifico: 465.5seg • Encendidos (total): 5 • Vida de servicio: 3500seg • Proporción de expansión: 280:1 • Longitud: Guardada 86.5/ Extendida 163.5 • Diámetro (Nozzle extensión): 84.5 Figura 3. Motor con tobera recogida. Pratt & Whitney Rocketdyne RL10B-2
Fuente: Control and dynamical systems [en línea]. Pasadena California: California Institute of Technology, 2008. [Consultado 10 de junio de 2008]. Disponible en Internet: http://www.cds.caltech.edu/~jshumber/AIAA2001.pdf
24
5.3 BUSQUEDA INTERNA En esta etapa se busca información útil por parte de todos los miembros del equipo con el fin de utilizarla al problema a resolver. � Fuente de alimentación • Baterías � Generación de movimiento • Servomotor • Motor paso a paso • Motor DC � Sistema de extensión • Tornillo de bolas • Pistón • Piñón cremallera • Riel • Resortes • Cadenas � Modificación del empuje vectorial • Pistones con pivote • Aletas en la tobera • Pestañas • Pistones en la punta de la tobera � Sujeción entre etapas • Pines • Acople hembra-macho roscado • Acople por contacto • Sistema de ganchos
25
5.4 EXPLORACION SISTEMATICA En esta etapa se exploraron todos los fragmentos de conceptos generados en las etapas anteriores de manera sistematizada. Primero se realizó el árbol de clasificación de conceptos en donde a cada subsistema se le descompone para clasificar así sus componentes principales y posteriormente seleccionar los más óptimos que se ajusten a las necesidades del proyecto. Luego se realizó la tabla de combinación de conceptos la cual permitió identificar las posibles combinaciones de soluciones para las subfunciones y obtener una solución completa para el problema. 5.4.1 Árbol de clasificación de conceptos. A continuación se describen los diferentes subsistemas con sus respetivas subfunciones y posibles componentes. � Fuente de alimentación. Dispositivo el cual es encargado de suministrar energía eléctrica al sistema, entre sus principales características se tuvo en cuenta la durabilidad de la misma y el peso del dispositivo a seleccionar. Figura 4. Fuente de alimentación
26
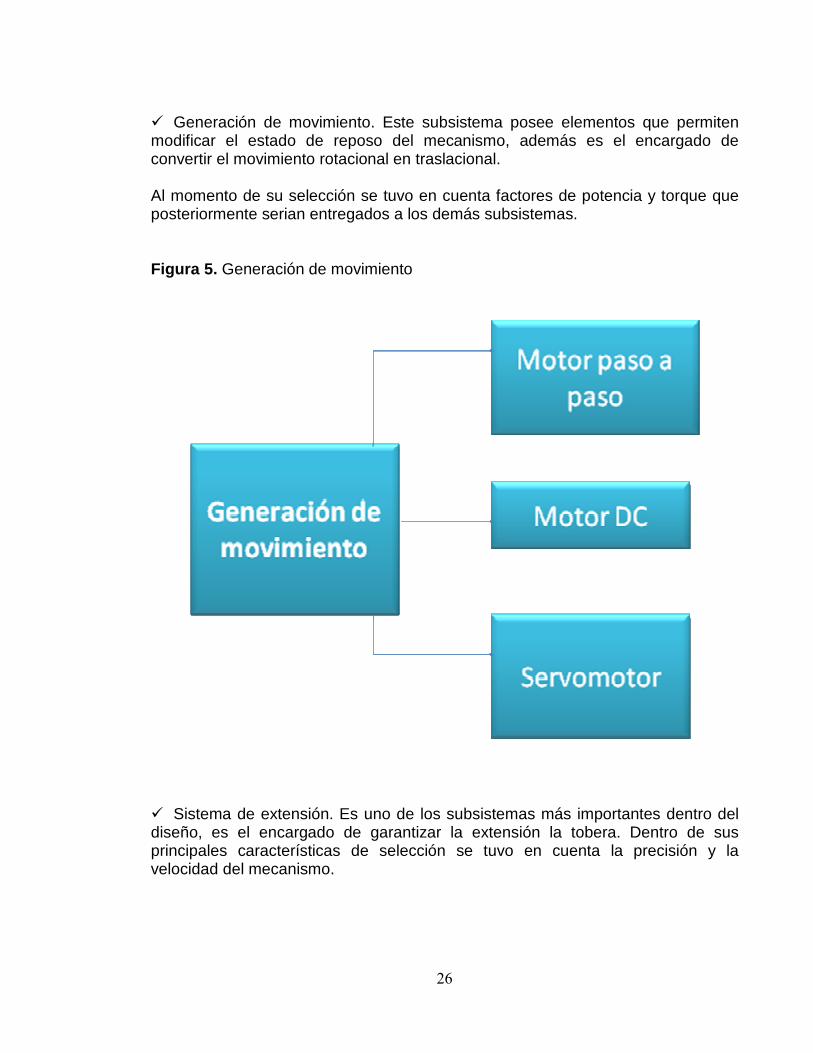
� Generación de movimiento. Este subsistema posee elementos que permiten modificar el estado de reposo del mecanismo, además es el encargado de convertir el movimiento rotacional en traslacional. Al momento de su selección se tuvo en cuenta factores de potencia y torque que posteriormente serian entregados a los demás subsistemas.
Figura 5. Generación de movimiento
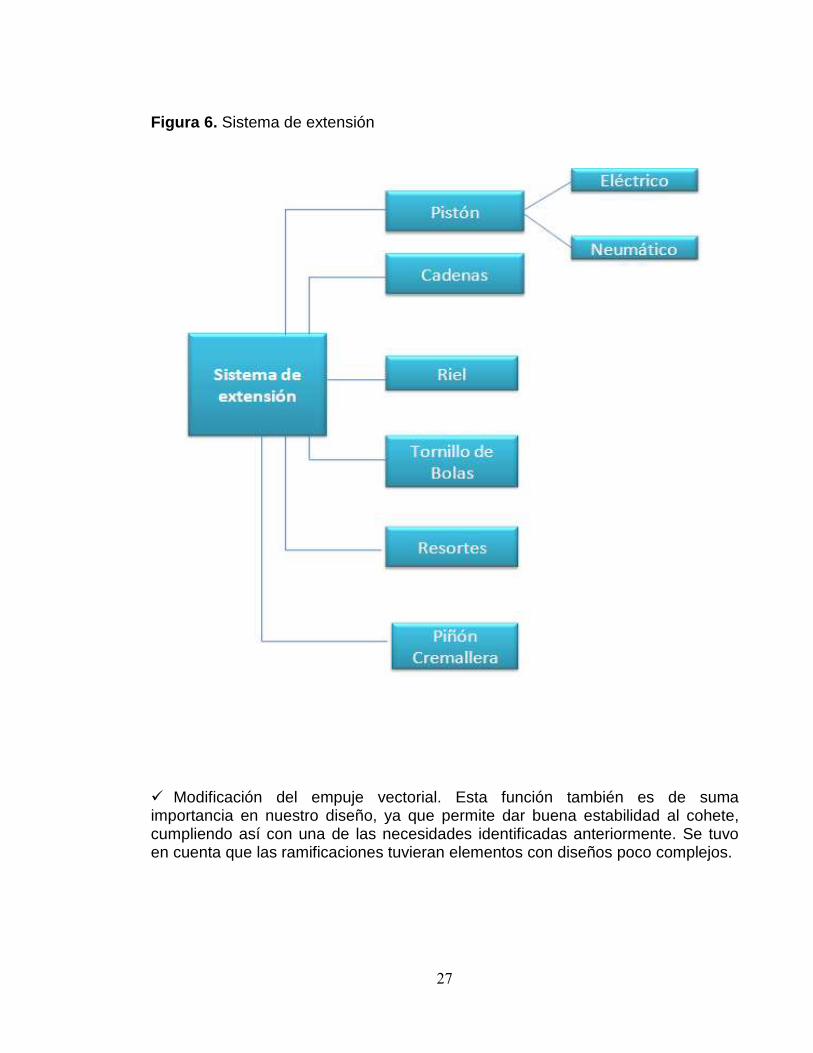
� Sistema de extensión. Es uno de los subsistemas más importantes dentro del diseño, es el encargado de garantizar la extensión la tobera. Dentro de sus principales características de selección se tuvo en cuenta la precisión y la velocidad del mecanismo.
27
Figura 6. Sistema de extensión
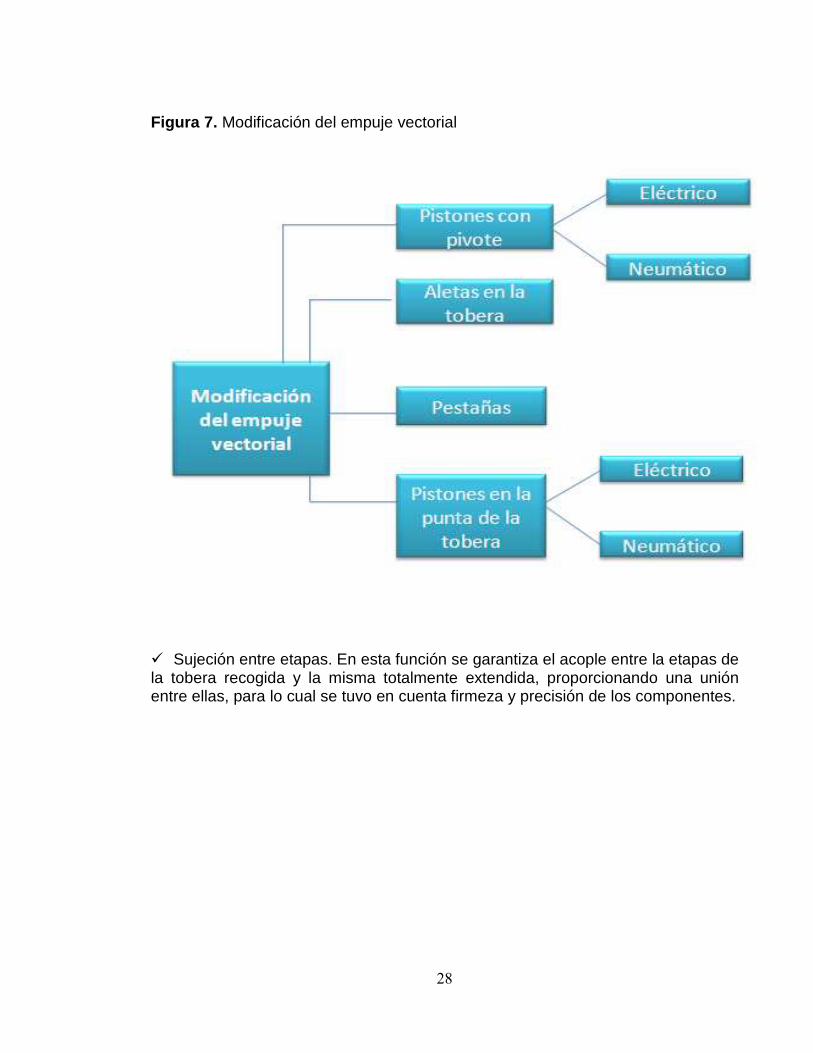
� Modificación del empuje vectorial. Esta función también es de suma importancia en nuestro diseño, ya que permite dar buena estabilidad al cohete, cumpliendo así con una de las necesidades identificadas anteriormente. Se tuvo en cuenta que las ramificaciones tuvieran elementos con diseños poco complejos.
28
Figura 7. Modificación del empuje vectorial
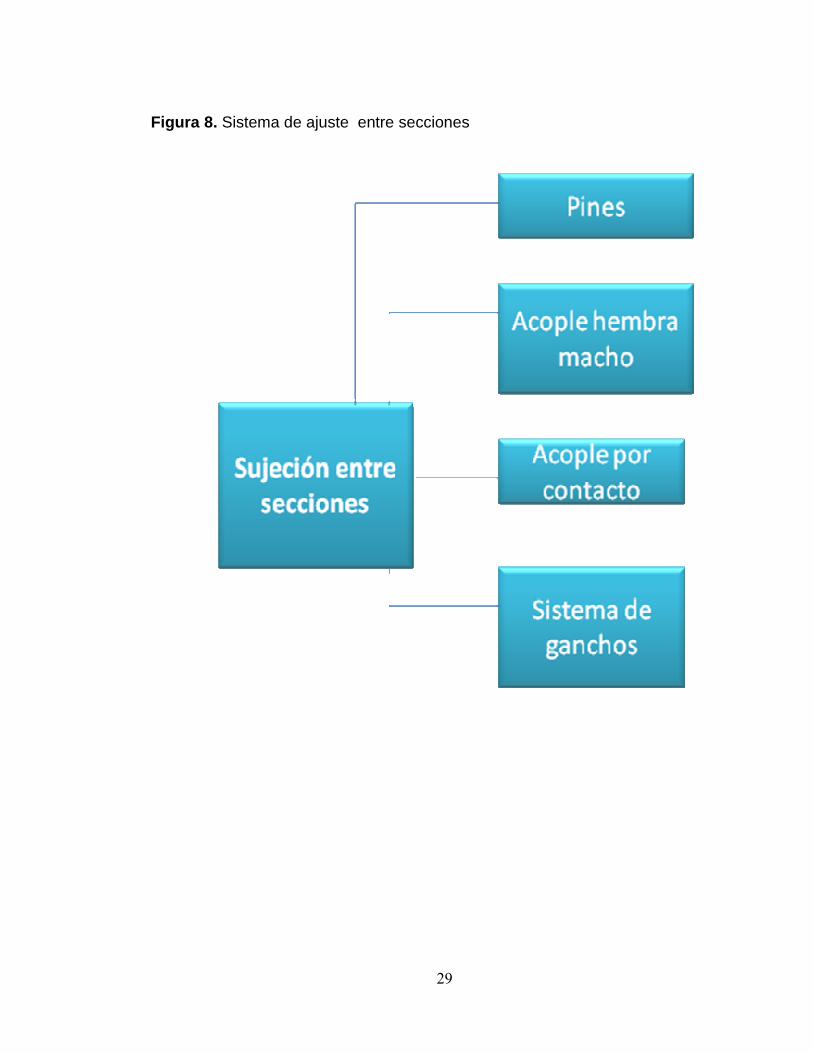
� Sujeción entre etapas. En esta función se garantiza el acople entre la etapas de la tobera recogida y la misma totalmente extendida, proporcionando una unión entre ellas, para lo cual se tuvo en cuenta firmeza y precisión de los componentes.
29
Figura 8. Sistema de ajuste entre secciones
30
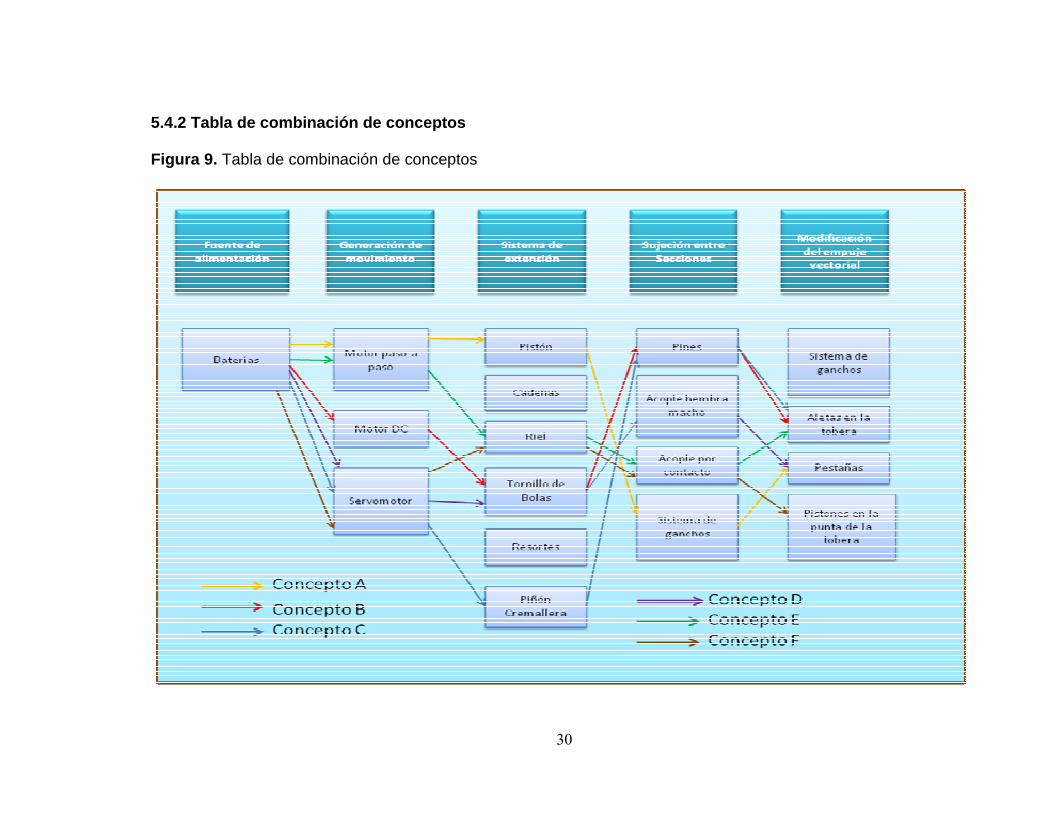
5.4.2 Tabla de combinación de conceptos
Figura 9. Tabla de combinación de conceptos
31
Al momento de generar la tabla de combinación de conceptos se observa que ninguno de los conceptos seleccionados utiliza para la función de extender tobera los elementos de cadena ni el de resorte, esto es debido a que se descarta su uso en el proyecto pues estos elementos presentan poca estabilidad frente a grandes vibraciones. 5.4.3 Descripción concepto A
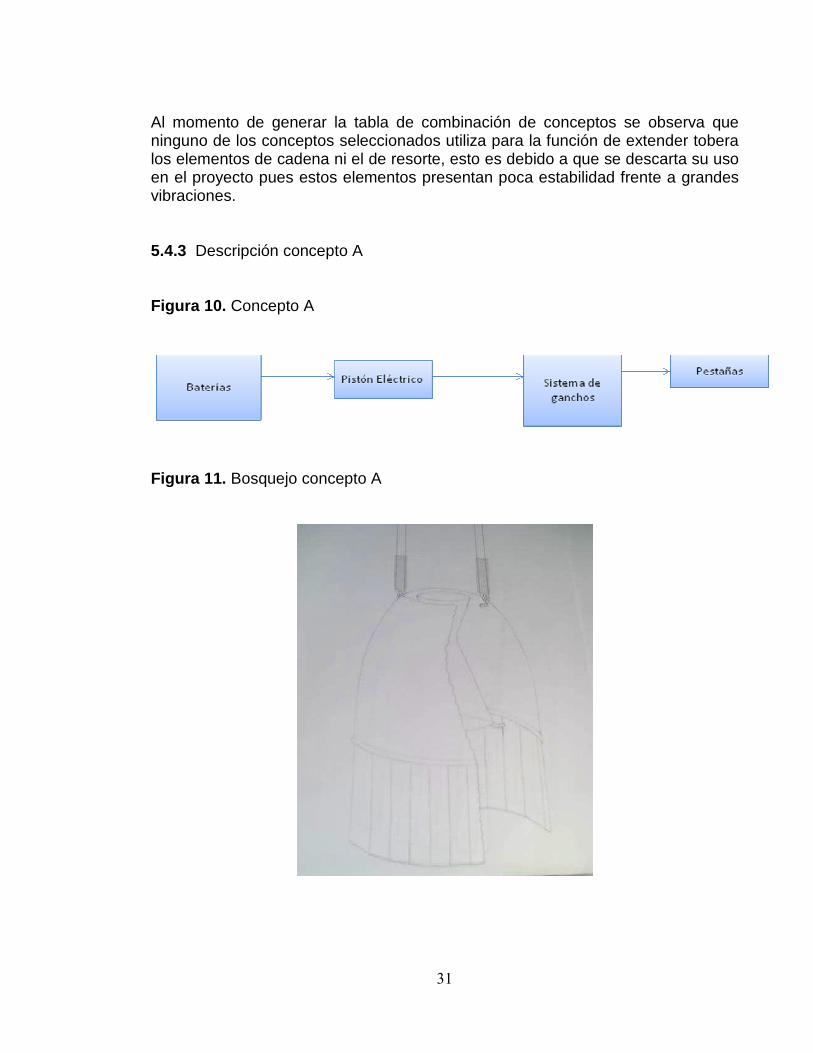
Figura 10. Concepto A
Figura 11. Bosquejo concepto A
32
Este concepto posee un juego de pistones eléctricos para el sistema de extensión de la tobera, un mecanismo de ganchos que proporciona la unión entre las etapas del mecanismo en general y un grupo de pestañas para que al ser accionadas cumplan la función de modificar el empuje vectorial, similar a lo que poseen las toberas de los aviones de combate como la del avión MIG 29
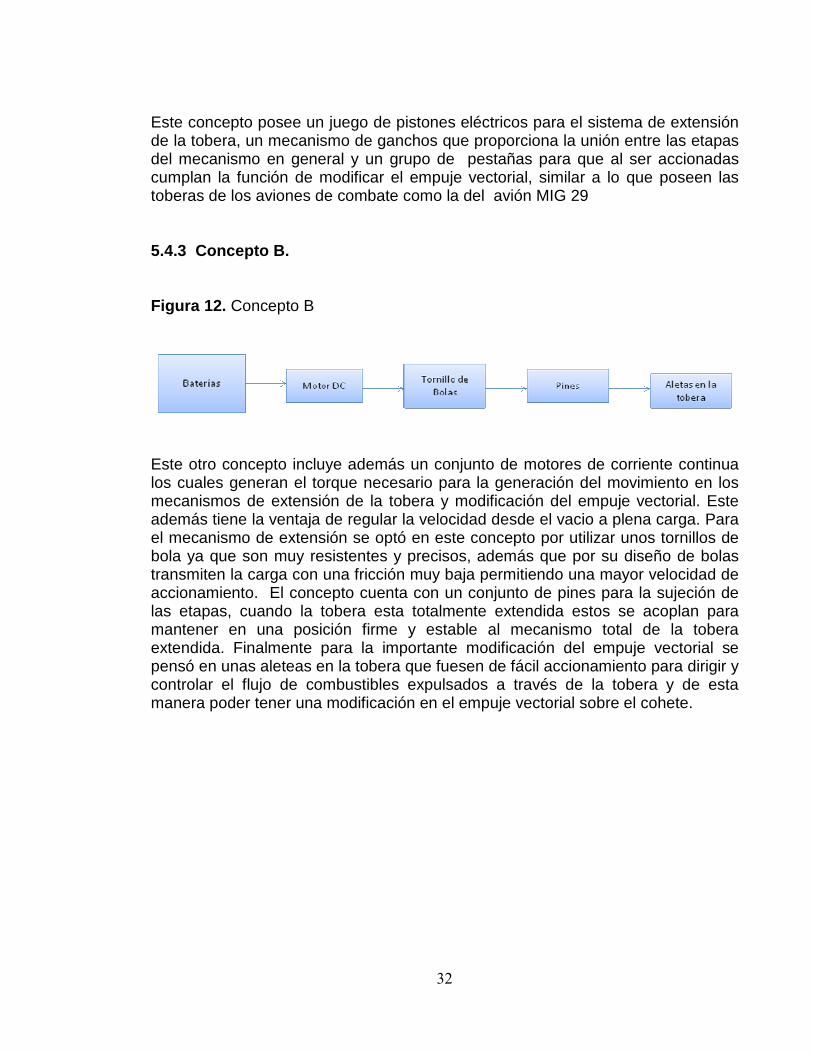
5.4.3 Concepto B. Figura 12. Concepto B
Este otro concepto incluye además un conjunto de motores de corriente continua los cuales generan el torque necesario para la generación del movimiento en los mecanismos de extensión de la tobera y modificación del empuje vectorial. Este además tiene la ventaja de regular la velocidad desde el vacio a plena carga. Para el mecanismo de extensión se optó en este concepto por utilizar unos tornillos de bola ya que son muy resistentes y precisos, además que por su diseño de bolas transmiten la carga con una fricción muy baja permitiendo una mayor velocidad de accionamiento. El concepto cuenta con un conjunto de pines para la sujeción de las etapas, cuando la tobera esta totalmente extendida estos se acoplan para mantener en una posición firme y estable al mecanismo total de la tobera extendida. Finalmente para la importante modificación del empuje vectorial se pensó en unas aleteas en la tobera que fuesen de fácil accionamiento para dirigir y controlar el flujo de combustibles expulsados a través de la tobera y de esta manera poder tener una modificación en el empuje vectorial sobre el cohete.
33
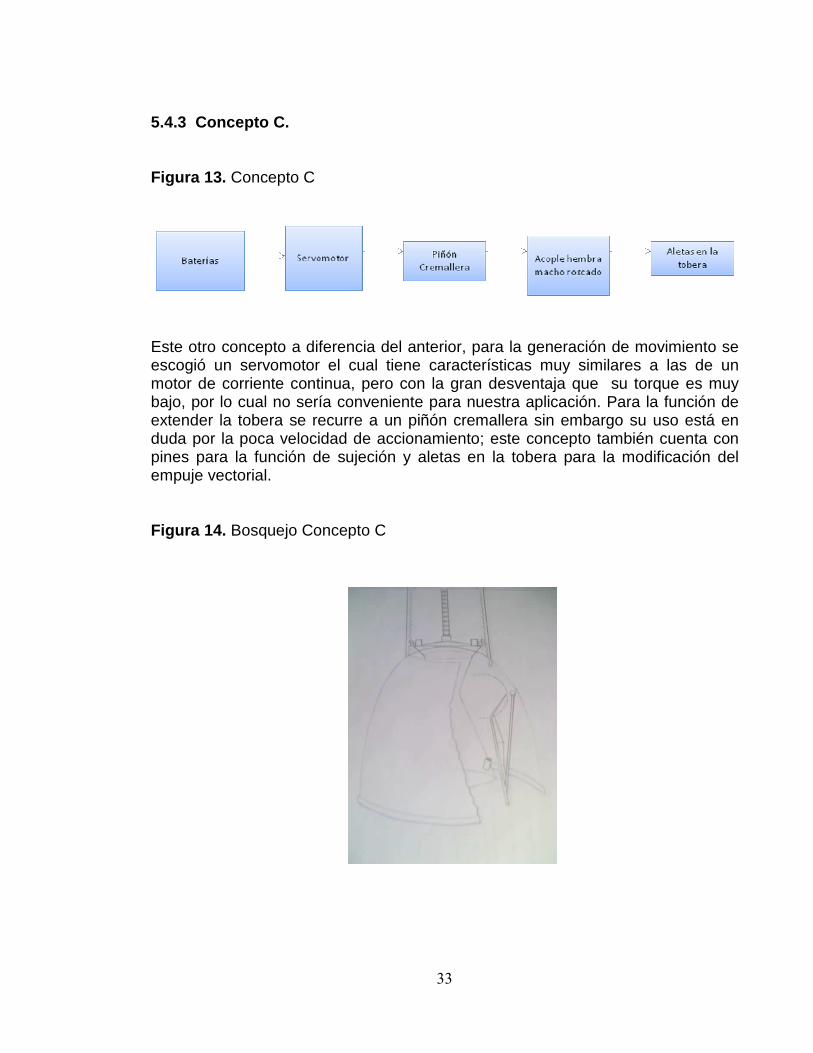
5.4.3 Concepto C. Figura 13. Concepto C
Este otro concepto a diferencia del anterior, para la generación de movimiento se escogió un servomotor el cual tiene características muy similares a las de un motor de corriente continua, pero con la gran desventaja que su torque es muy bajo, por lo cual no sería conveniente para nuestra aplicación. Para la función de extender la tobera se recurre a un piñón cremallera sin embargo su uso está en duda por la poca velocidad de accionamiento; este concepto también cuenta con pines para la función de sujeción y aletas en la tobera para la modificación del empuje vectorial. Figura 14. Bosquejo Concepto C
34
5.4.3 Concepto D. Figura 15. Concepto D
Este concepto difiere de los anteriores en que en la función de sujeción entre etapas se seleccionó un acople hembra macho roscado, Figura 16. Bosquejo Concepto D
35
5.4.3 Concepto E. Figura 17. Concepto E
En este concepto se incorpora la selección de un riel para la función de extender la tobera, pero tiene la complicación de su poca estabilidad y controlabilidad, además tiene un sistema de acople por contacto para la función de sujeción entre etapas que posee la desventaja de la poca precisión de ensamble. Figura 18. Bosquejo Concepto E
36
5.4.3 Concepto F. Figura 19. Concepto F
Este último concepto es una mezcla de los componentes de los anteriores conceptos, pero con la diferencia de un material flexible a manera de fuelle accionado por pistones en el extremo de la tobera para la modificación del empuje vectorial. Figura 20. Bosquejo Concepto F
37
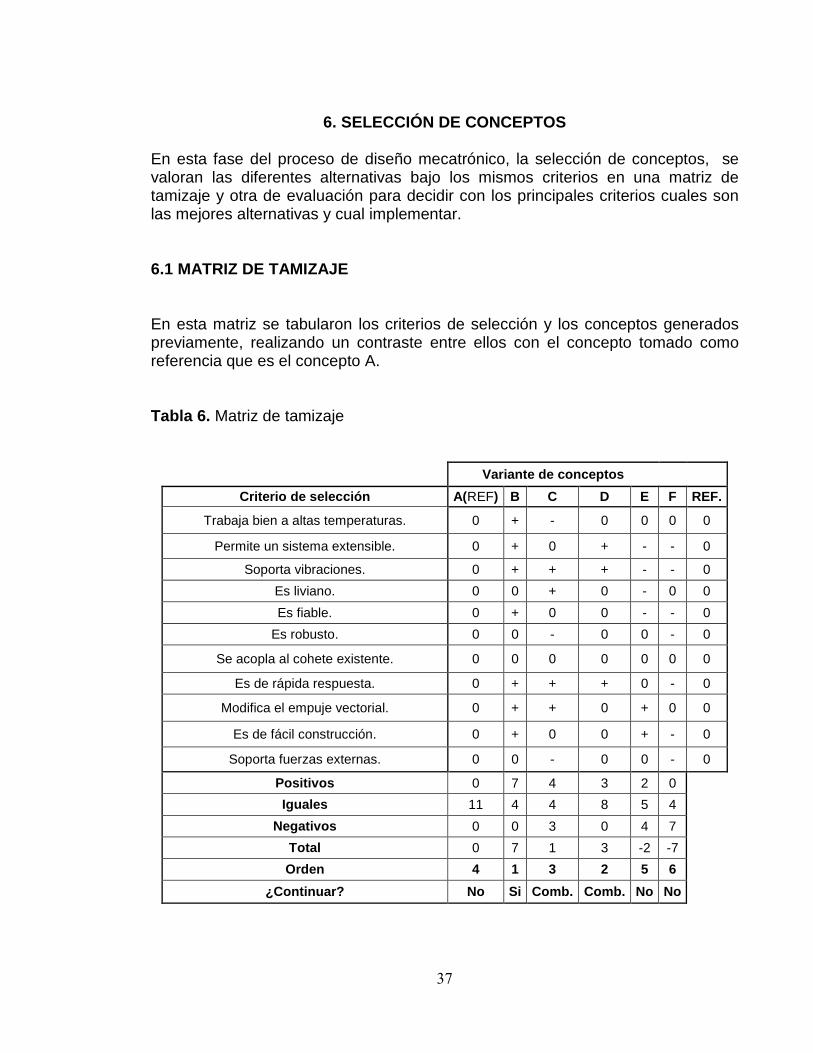
6. SELECCIÓN DE CONCEPTOS En esta fase del proceso de diseño mecatrónico, la selección de conceptos, se valoran las diferentes alternativas bajo los mismos criterios en una matriz de tamizaje y otra de evaluación para decidir con los principales criterios cuales son las mejores alternativas y cual implementar. 6.1 MATRIZ DE TAMIZAJE En esta matriz se tabularon los criterios de selección y los conceptos generados previamente, realizando un contraste entre ellos con el concepto tomado como referencia que es el concepto A. Tabla 6. Matriz de tamizaje
Variante de conceptos
Criterio de selección A(REF) B C D E F REF.
Trabaja bien a altas temperaturas. 0 + - 0 0 0 0
Permite un sistema extensible. 0 + 0 + - - 0
Soporta vibraciones. 0 + + + - - 0
Es liviano. 0 0 + 0 - 0 0
Es fiable. 0 + 0 0 - - 0
Es robusto. 0 0 - 0 0 - 0
Se acopla al cohete existente. 0 0 0 0 0 0 0
Es de rápida respuesta. 0 + + + 0 - 0
Modifica el empuje vectorial. 0 + + 0 + 0 0
Es de fácil construcción. 0 + 0 0 + - 0
Soporta fuerzas externas. 0 0 - 0 0 - 0
Positivos 0 7 4 3 2 0
Iguales 11 4 4 8 5 4
Negativos 0 0 3 0 4 7
Total 0 7 1 3 -2 -7
Orden 4 1 3 2 5 6
¿Continuar? No Si Comb. Comb. No No
38
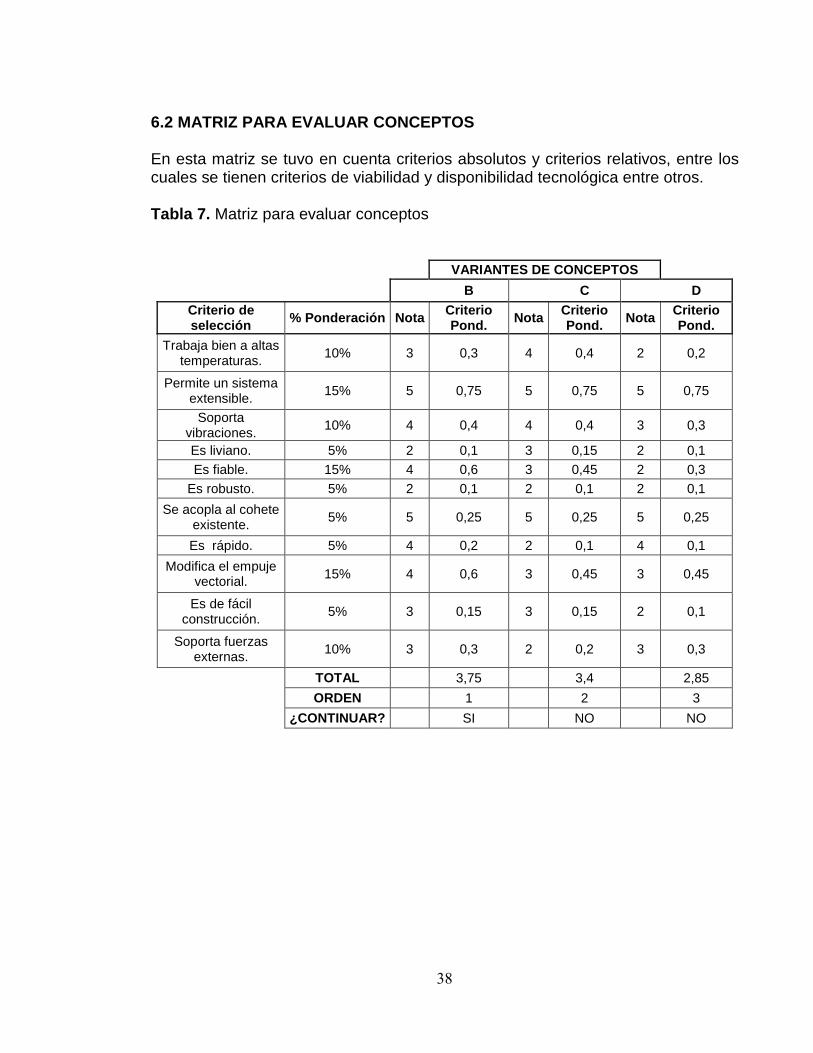
6.2 MATRIZ PARA EVALUAR CONCEPTOS En esta matriz se tuvo en cuenta criterios absolutos y criterios relativos, entre los cuales se tienen criterios de viabilidad y disponibilidad tecnológica entre otros. Tabla 7. Matriz para evaluar conceptos
VARIANTES DE CONCEPTOS
B C D Criterio de selección % Ponderación Nota Criterio
Pond. Nota Criterio Pond. Nota Criterio
Pond.
Trabaja bien a altas temperaturas.
10% 3 0,3 4 0,4 2 0,2
Permite un sistema extensible.
15% 5 0,75 5 0,75 5 0,75
Soporta vibraciones.
10% 4 0,4 4 0,4 3 0,3
Es liviano. 5% 2 0,1 3 0,15 2 0,1
Es fiable. 15% 4 0,6 3 0,45 2 0,3
Es robusto. 5% 2 0,1 2 0,1 2 0,1
Se acopla al cohete existente.
5% 5 0,25 5 0,25 5 0,25
Es rápido. 5% 4 0,2 2 0,1 4 0,1
Modifica el empuje vectorial. 15% 4 0,6 3 0,45 3 0,45
Es de fácil construcción.
5% 3 0,15 3 0,15 2 0,1
Soporta fuerzas externas.
10% 3 0,3 2 0,2 3 0,3
TOTAL 3,75 3,4 2,85
ORDEN 1 2 3
¿CONTINUAR? SI NO NO
39
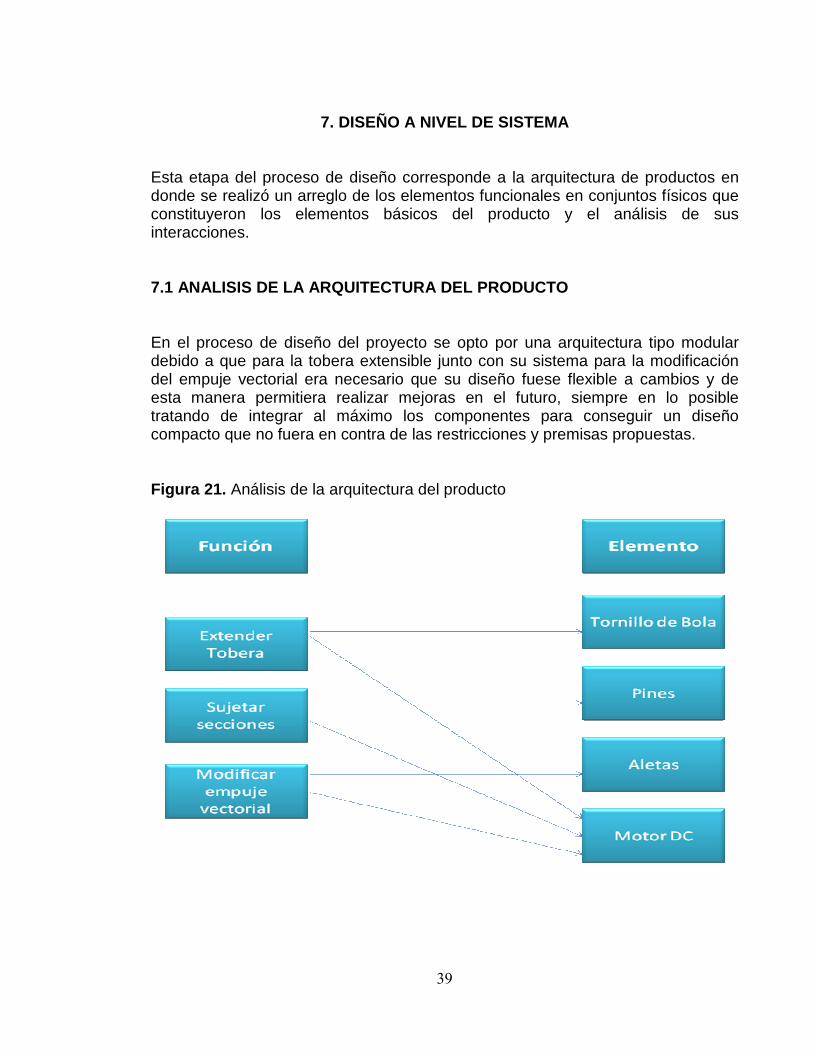
7. DISEÑO A NIVEL DE SISTEMA
Esta etapa del proceso de diseño corresponde a la arquitectura de productos en donde se realizó un arreglo de los elementos funcionales en conjuntos físicos que constituyeron los elementos básicos del producto y el análisis de sus interacciones. 7.1 ANALISIS DE LA ARQUITECTURA DEL PRODUCTO En el proceso de diseño del proyecto se opto por una arquitectura tipo modular debido a que para la tobera extensible junto con su sistema para la modificación del empuje vectorial era necesario que su diseño fuese flexible a cambios y de esta manera permitiera realizar mejoras en el futuro, siempre en lo posible tratando de integrar al máximo los componentes para conseguir un diseño compacto que no fuera en contra de las restricciones y premisas propuestas. Figura 21. Análisis de la arquitectura del producto
40
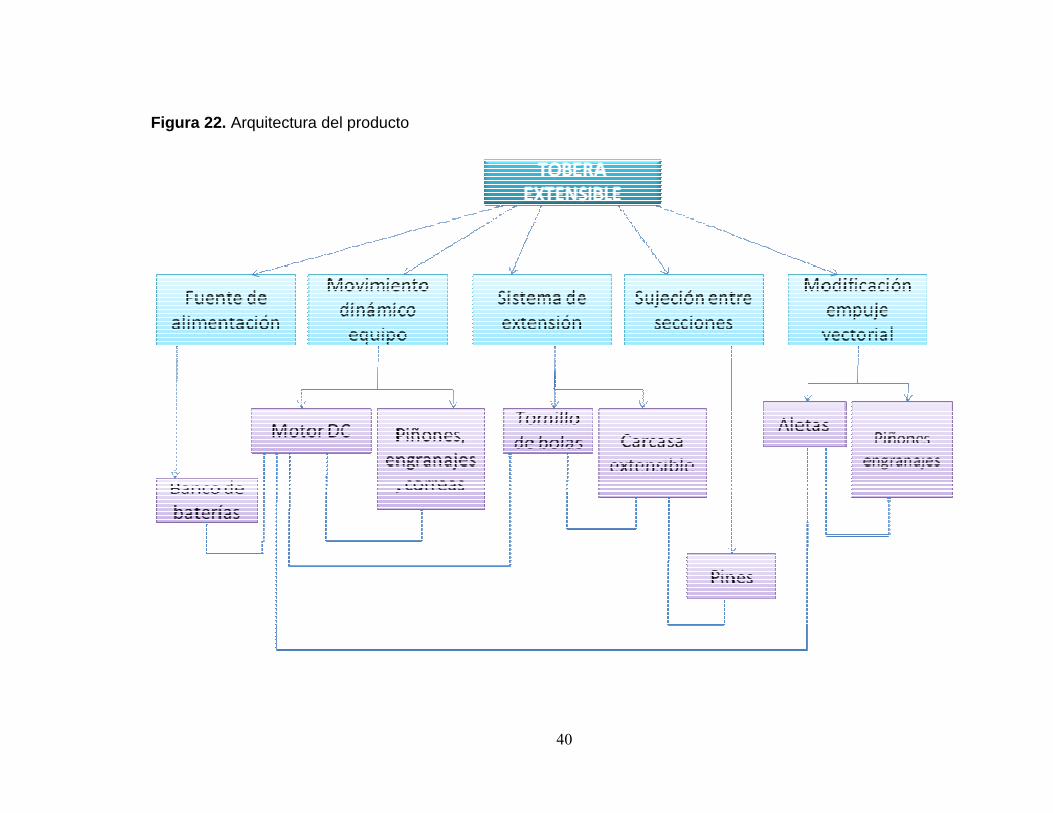
Figura 22. Arquitectura del producto
41
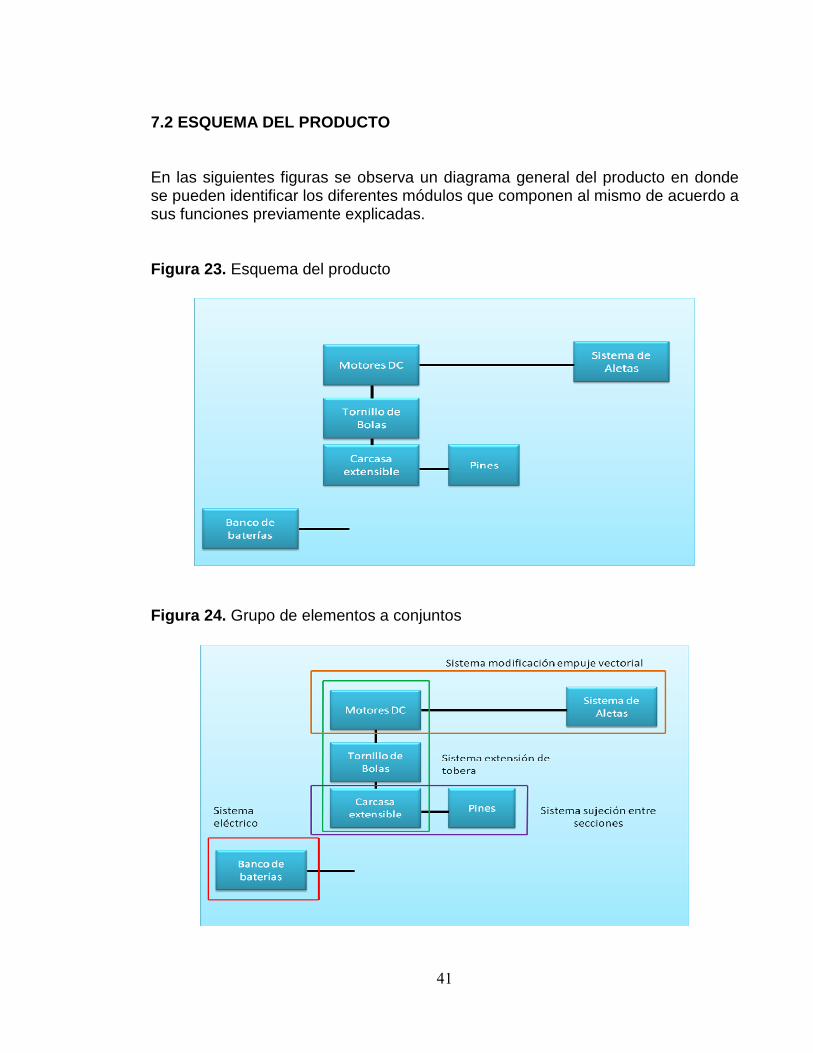
7.2 ESQUEMA DEL PRODUCTO En las siguientes figuras se observa un diagrama general del producto en donde se pueden identificar los diferentes módulos que componen al mismo de acuerdo a sus funciones previamente explicadas. Figura 23. Esquema del producto
Figura 24. Grupo de elementos a conjuntos
42
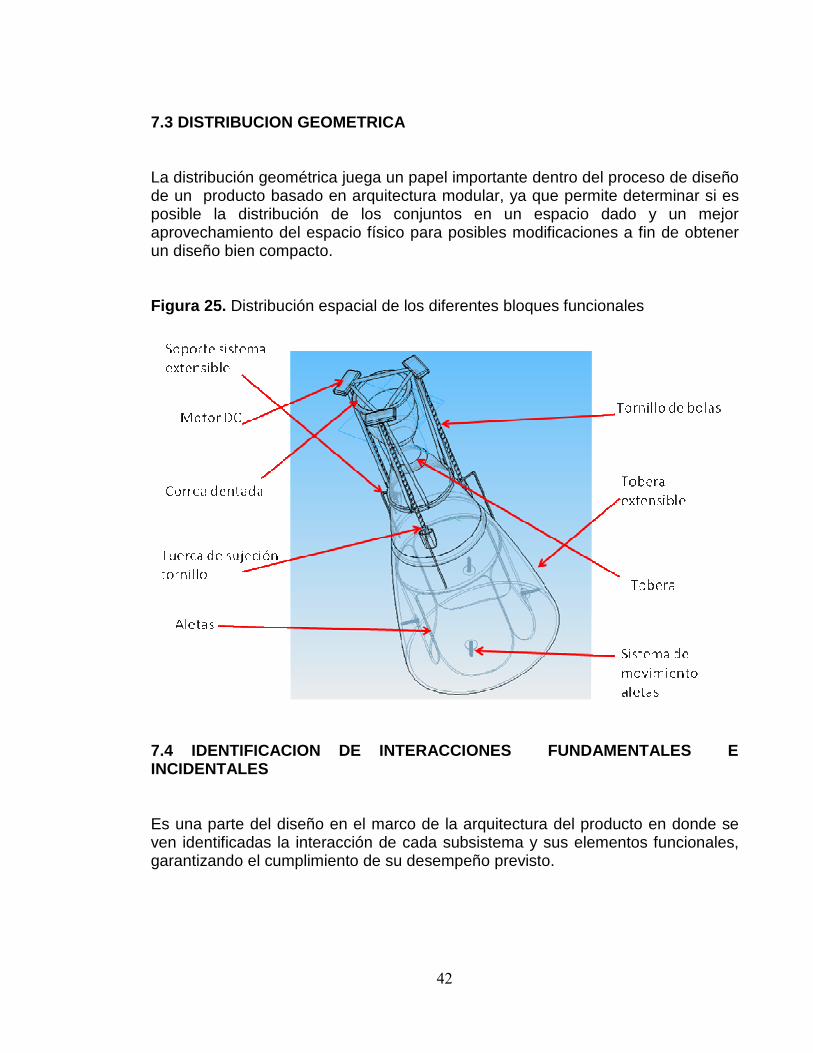
7.3 DISTRIBUCION GEOMETRICA
La distribución geométrica juega un papel importante dentro del proceso de diseño de un producto basado en arquitectura modular, ya que permite determinar si es posible la distribución de los conjuntos en un espacio dado y un mejor aprovechamiento del espacio físico para posibles modificaciones a fin de obtener un diseño bien compacto.
Figura 25. Distribución espacial de los diferentes bloques funcionales
7.4 IDENTIFICACION DE INTERACCIONES FUNDAMENTALES E INCIDENTALES
Es una parte del diseño en el marco de la arquitectura del producto en donde se ven identificadas la interacción de cada subsistema y sus elementos funcionales, garantizando el cumplimiento de su desempeño previsto.
43
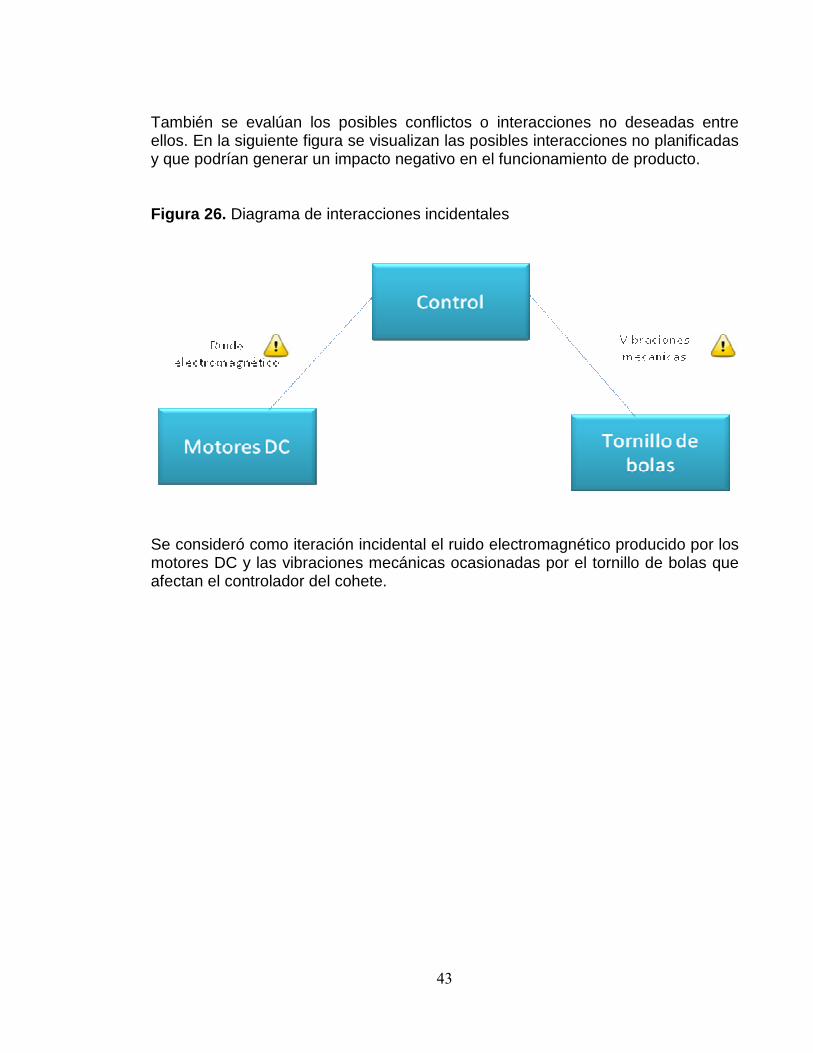
También se evalúan los posibles conflictos o interacciones no deseadas entre ellos. En la siguiente figura se visualizan las posibles interacciones no planificadas y que podrían generar un impacto negativo en el funcionamiento de producto.
Figura 26. Diagrama de interacciones incidentales
Se consideró como iteración incidental el ruido electromagnético producido por los motores DC y las vibraciones mecánicas ocasionadas por el tornillo de bolas que afectan el controlador del cohete.
44
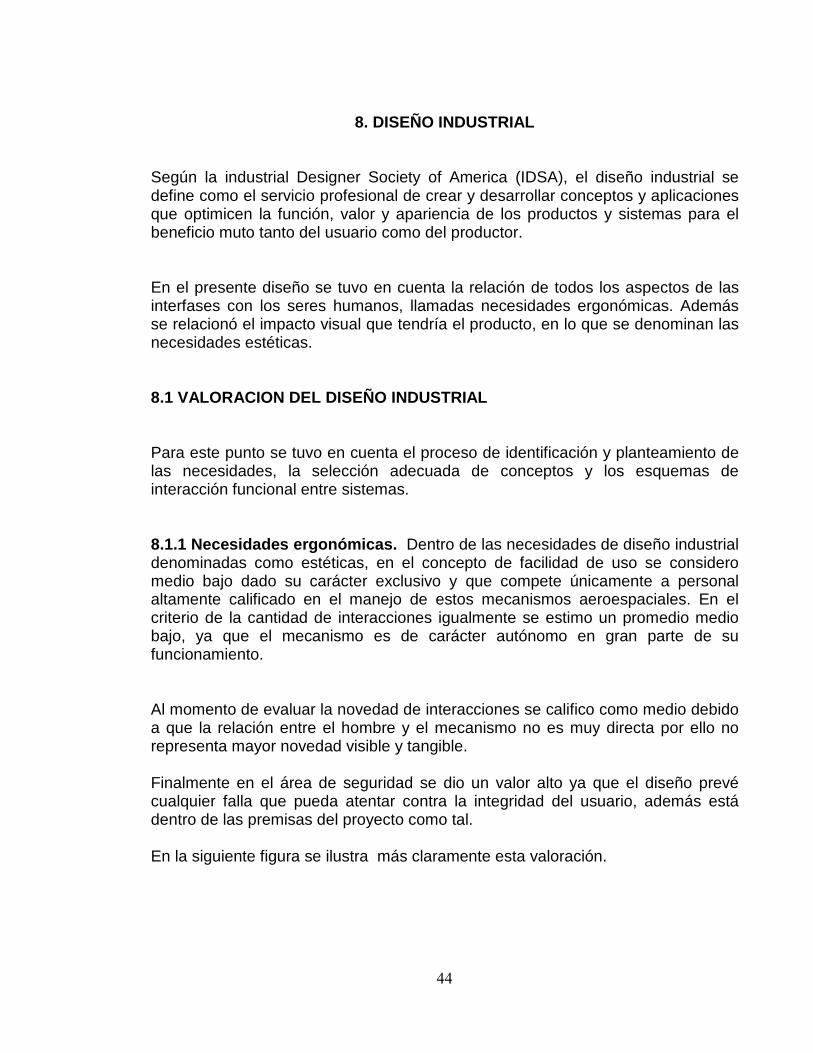
8. DISEÑO INDUSTRIAL Según la industrial Designer Society of America (IDSA), el diseño industrial se define como el servicio profesional de crear y desarrollar conceptos y aplicaciones que optimicen la función, valor y apariencia de los productos y sistemas para el beneficio muto tanto del usuario como del productor. En el presente diseño se tuvo en cuenta la relación de todos los aspectos de las interfases con los seres humanos, llamadas necesidades ergonómicas. Además se relacionó el impacto visual que tendría el producto, en lo que se denominan las necesidades estéticas. 8.1 VALORACION DEL DISEÑO INDUSTRIAL Para este punto se tuvo en cuenta el proceso de identificación y planteamiento de las necesidades, la selección adecuada de conceptos y los esquemas de interacción funcional entre sistemas. 8.1.1 Necesidades ergonómicas. Dentro de las necesidades de diseño industrial denominadas como estéticas, en el concepto de facilidad de uso se considero medio bajo dado su carácter exclusivo y que compete únicamente a personal altamente calificado en el manejo de estos mecanismos aeroespaciales. En el criterio de la cantidad de interacciones igualmente se estimo un promedio medio bajo, ya que el mecanismo es de carácter autónomo en gran parte de su funcionamiento. Al momento de evaluar la novedad de interacciones se califico como medio debido a que la relación entre el hombre y el mecanismo no es muy directa por ello no representa mayor novedad visible y tangible. Finalmente en el área de seguridad se dio un valor alto ya que el diseño prevé cualquier falla que pueda atentar contra la integridad del usuario, además está dentro de las premisas del proyecto como tal. En la siguiente figura se ilustra más claramente esta valoración.
45
Figura 27. Necesidades ergonómicas
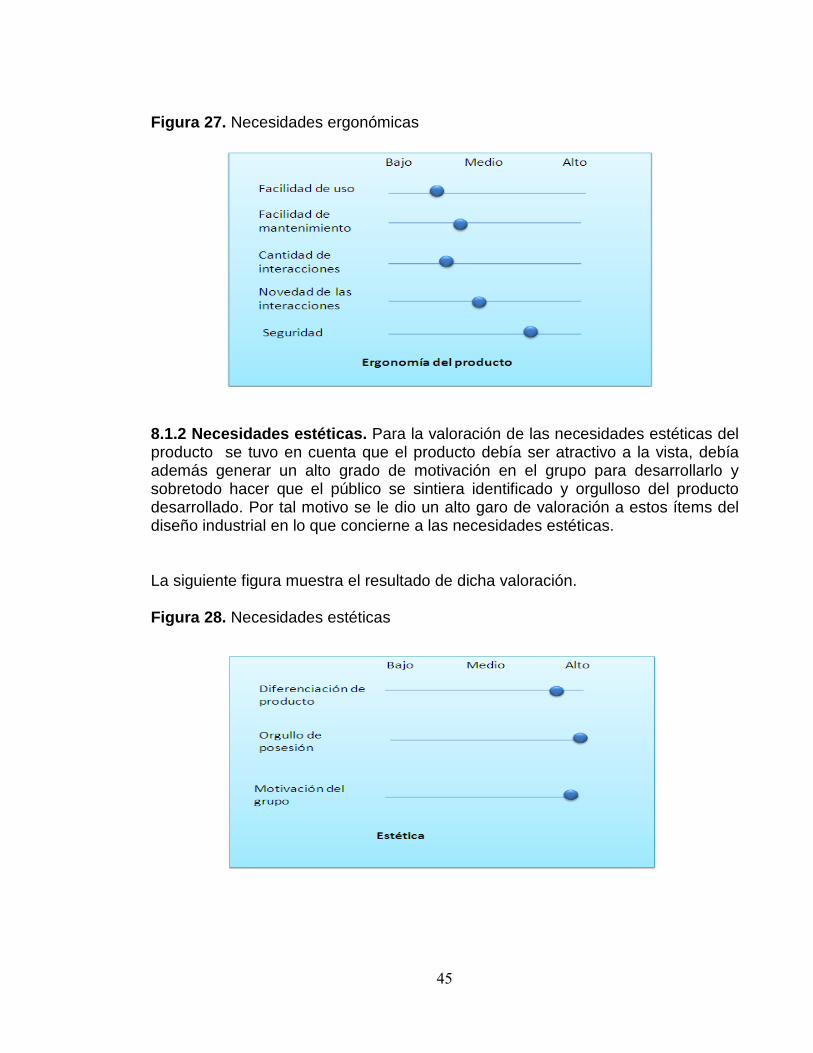
8.1.2 Necesidades estéticas. Para la valoración de las necesidades estéticas del producto se tuvo en cuenta que el producto debía ser atractivo a la vista, debía además generar un alto grado de motivación en el grupo para desarrollarlo y sobretodo hacer que el público se sintiera identificado y orgulloso del producto desarrollado. Por tal motivo se le dio un alto garo de valoración a estos ítems del diseño industrial en lo que concierne a las necesidades estéticas. La siguiente figura muestra el resultado de dicha valoración.
Figura 28. Necesidades estéticas
46
8.2 DOMINADO POR LA TECNOLOGIA O POR EL USUARIO Finalmente, dentro del proceso de diseño industrial se estimo que el producto tenía una gran tendencia a ser dominado por la tecnología, ya que como se menciono anteriormente, el usuario tiene muy pocas interacciones con el mismo, dado su carácter que precisa de una autonomía casi total. Figura 29. Dominio de la tecnología
47
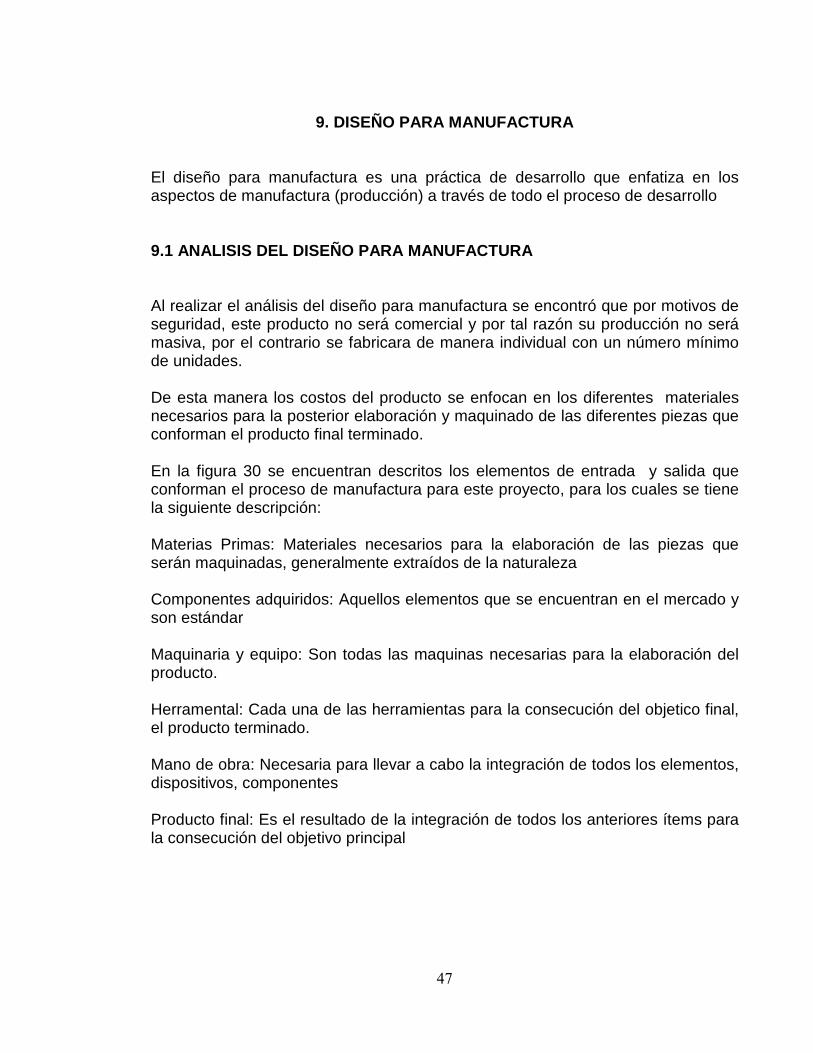
9. DISEÑO PARA MANUFACTURA El diseño para manufactura es una práctica de desarrollo que enfatiza en los aspectos de manufactura (producción) a través de todo el proceso de desarrollo 9.1 ANALISIS DEL DISEÑO PARA MANUFACTURA Al realizar el análisis del diseño para manufactura se encontró que por motivos de seguridad, este producto no será comercial y por tal razón su producción no será masiva, por el contrario se fabricara de manera individual con un número mínimo de unidades. De esta manera los costos del producto se enfocan en los diferentes materiales necesarios para la posterior elaboración y maquinado de las diferentes piezas que conforman el producto final terminado. En la figura 30 se encuentran descritos los elementos de entrada y salida que conforman el proceso de manufactura para este proyecto, para los cuales se tiene la siguiente descripción: Materias Primas: Materiales necesarios para la elaboración de las piezas que serán maquinadas, generalmente extraídos de la naturaleza Componentes adquiridos: Aquellos elementos que se encuentran en el mercado y son estándar Maquinaria y equipo: Son todas las maquinas necesarias para la elaboración del producto. Herramental: Cada una de las herramientas para la consecución del objetico final, el producto terminado. Mano de obra: Necesaria para llevar a cabo la integración de todos los elementos, dispositivos, componentes Producto final: Es el resultado de la integración de todos los anteriores ítems para la consecución del objetivo principal
48
Figura 30 . Entrada y salida sistema para manufactura
49
10. PROTOTIPADO
Esta etapa del diseño nos da una aproximación al producto a través de una o más dimensiones de interés.
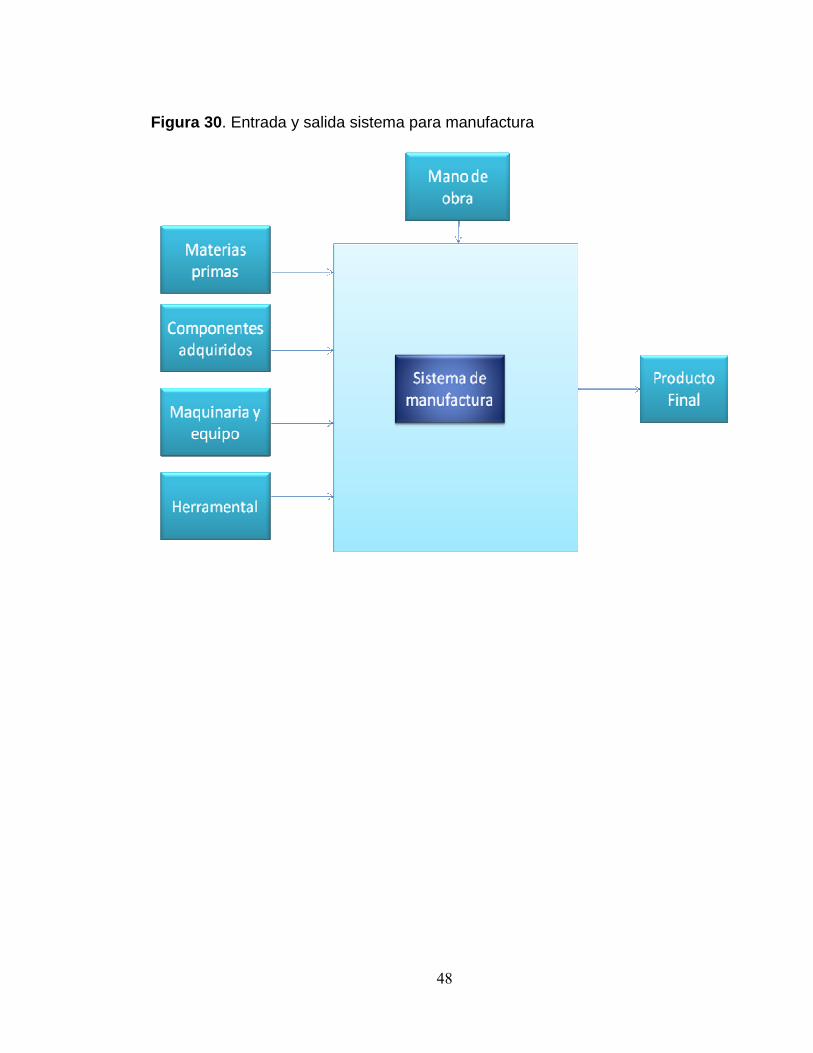
10.1 TIPOS DE PROTOTIPOS Los prototipos se dividen desde dos puntos de vista en cuatro tipos. En primera instancia se dividen en físicos y analíticos. El otro punto de vista se relaciona con la forma en que son elaborados los prototipos, si de forma completa o parcial. Para este diseño de realizo un prototipo analítico, el cual representa al producto de una forma no tangible , a través de modelos matemáticos y con la ayuda de un software CAD se plasmo la idea del concepto seleccionado como optimo. Además se realizo pruebas en el software Algor en donde se desarrolló un proceso iterativo de cálculo y análisis en el cual se manipularon las ecuaciones físicas fundamentales que rigen el comportamiento del sistema , teniendo como finalidad la determinación de los efecto producidos sobre este, como por ejemplo, esfuerzos, flujos de calor, pandeo, entre otros. Cuando sobre el mecanismo actúan elementos como fuerzas, temperaturas, velocidades, etc. Figura 31. Prototipo virtual
50
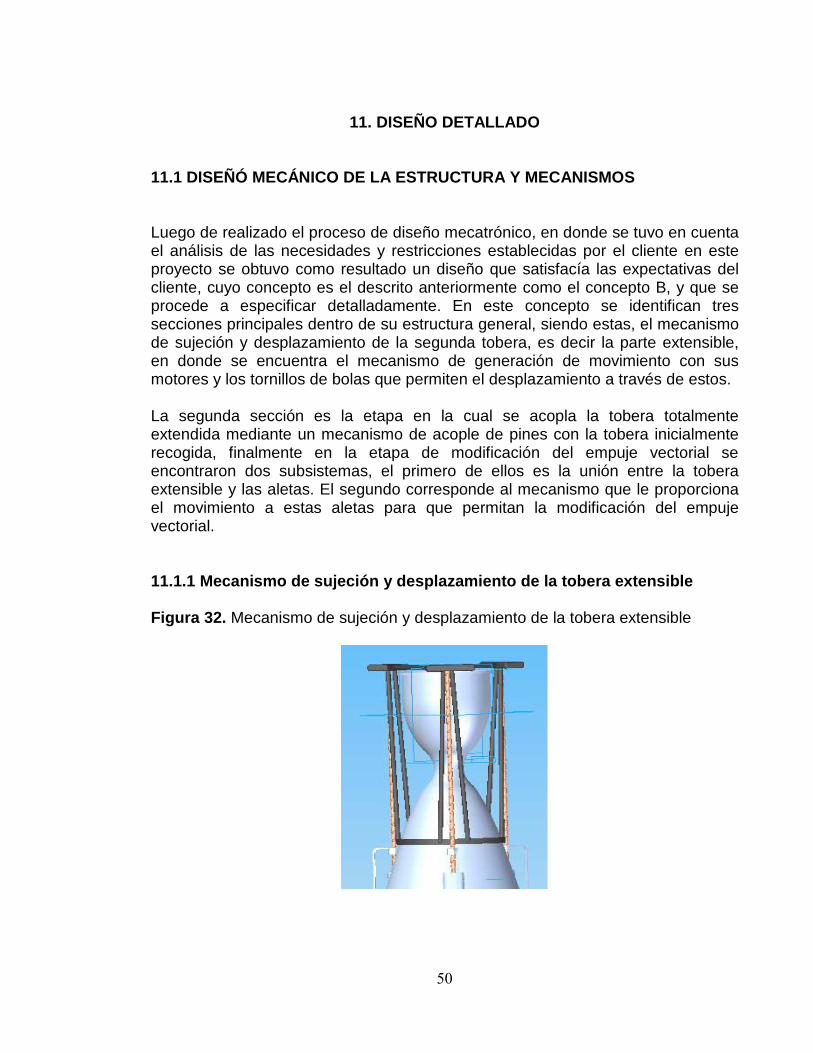
11. DISEÑO DETALLADO 11.1 DISEÑÓ MECÁNICO DE LA ESTRUCTURA Y MECANISMOS Luego de realizado el proceso de diseño mecatrónico, en donde se tuvo en cuenta el análisis de las necesidades y restricciones establecidas por el cliente en este proyecto se obtuvo como resultado un diseño que satisfacía las expectativas del cliente, cuyo concepto es el descrito anteriormente como el concepto B, y que se procede a especificar detalladamente. En este concepto se identifican tres secciones principales dentro de su estructura general, siendo estas, el mecanismo de sujeción y desplazamiento de la segunda tobera, es decir la parte extensible, en donde se encuentra el mecanismo de generación de movimiento con sus motores y los tornillos de bolas que permiten el desplazamiento a través de estos. La segunda sección es la etapa en la cual se acopla la tobera totalmente extendida mediante un mecanismo de acople de pines con la tobera inicialmente recogida, finalmente en la etapa de modificación del empuje vectorial se encontraron dos subsistemas, el primero de ellos es la unión entre la tobera extensible y las aletas. El segundo corresponde al mecanismo que le proporciona el movimiento a estas aletas para que permitan la modificación del empuje vectorial. 11.1.1 Mecanismo de sujeción y desplazamiento de la tobera extensible Figura 32. Mecanismo de sujeción y desplazamiento de la tobera extensible
51
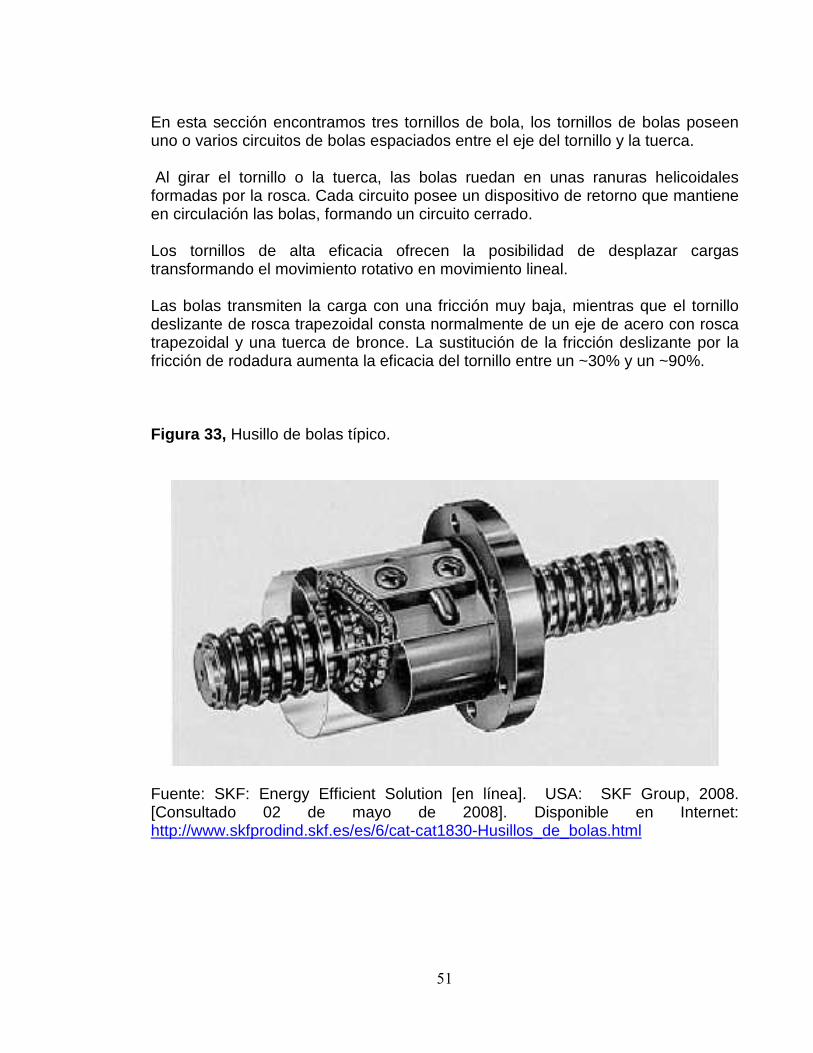
En esta sección encontramos tres tornillos de bola, los tornillos de bolas poseen uno o varios circuitos de bolas espaciados entre el eje del tornillo y la tuerca. Al girar el tornillo o la tuerca, las bolas ruedan en unas ranuras helicoidales formadas por la rosca. Cada circuito posee un dispositivo de retorno que mantiene en circulación las bolas, formando un circuito cerrado. Los tornillos de alta eficacia ofrecen la posibilidad de desplazar cargas transformando el movimiento rotativo en movimiento lineal. Las bolas transmiten la carga con una fricción muy baja, mientras que el tornillo deslizante de rosca trapezoidal consta normalmente de un eje de acero con rosca trapezoidal y una tuerca de bronce. La sustitución de la fricción deslizante por la fricción de rodadura aumenta la eficacia del tornillo entre un ~30% y un ~90%. Figura 33, Husillo de bolas típico.
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html
52
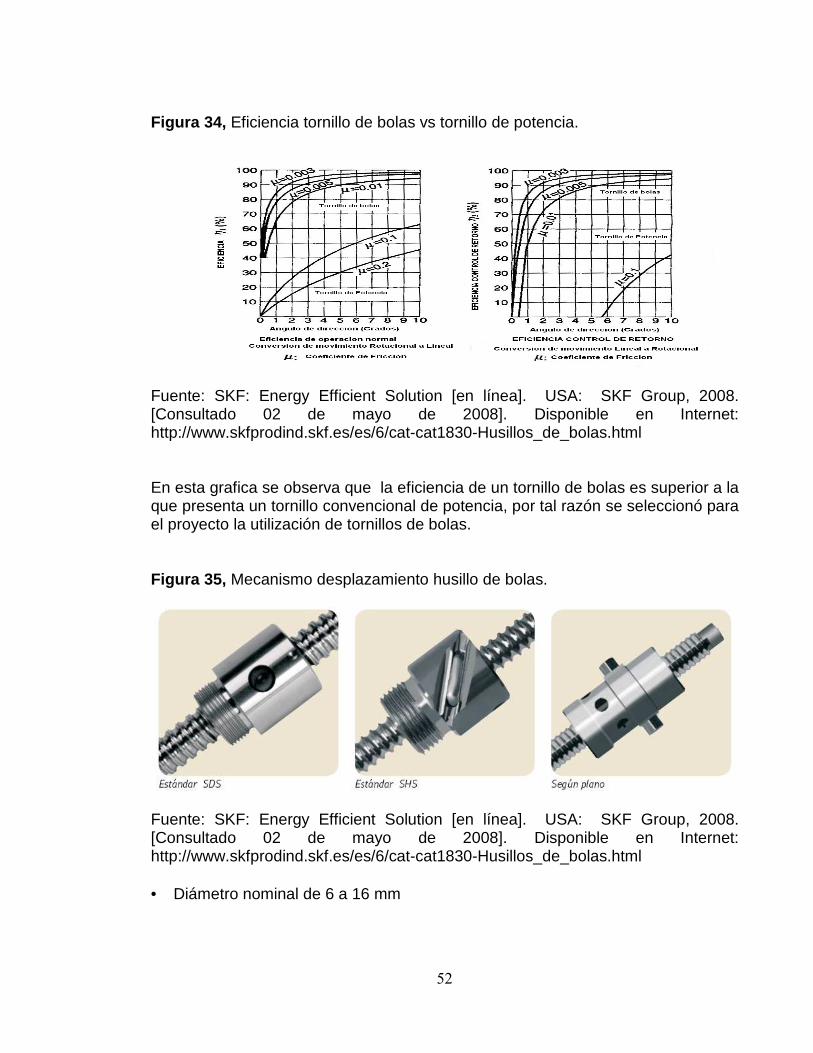
Figura 34, Eficiencia tornillo de bolas vs tornillo de potencia.
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html
En esta grafica se observa que la eficiencia de un tornillo de bolas es superior a la que presenta un tornillo convencional de potencia, por tal razón se seleccionó para el proyecto la utilización de tornillos de bolas. Figura 35, Mecanismo desplazamiento husillo de bolas.
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html • Diámetro nominal de 6 a 16 mm
53
• Paso: de 2 a 5 mm • Tuerca cilíndrica con extremo roscado: fácil montaje • Excelente repetitividad, alta capacidad de posicionamiento • Eliminación de juego con bolas sobredimensionadas bajo demanda (referencia BDS) • Rascadores opcionales: para todas las medidas • Material del husillo y la tuerca: X30Cr13 (equivalente a AISI 420) • Bolas en X105CrMo17 (equivalente a AISI 440C) excepto para medida 16x5R (SDS/BDS): bolas en 100 Cr6 (equivalente a AISI 52100)
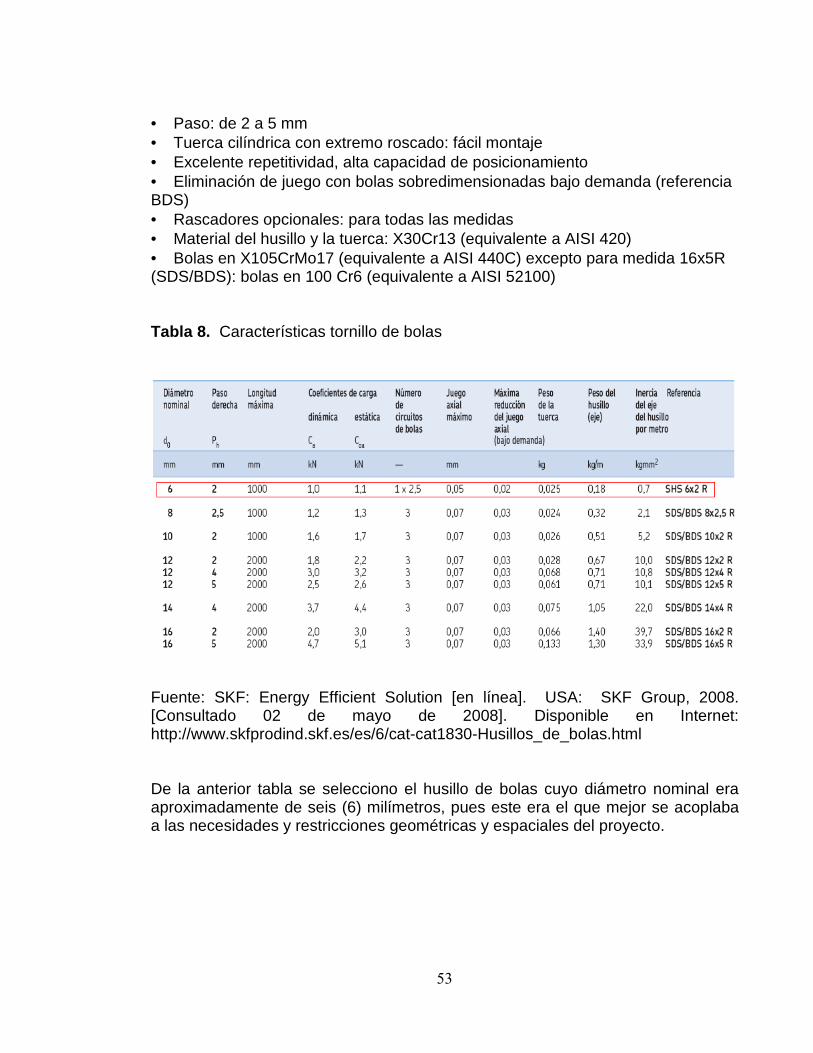
Tabla 8. Características tornillo de bolas
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html De la anterior tabla se selecciono el husillo de bolas cuyo diámetro nominal era aproximadamente de seis (6) milímetros, pues este era el que mejor se acoplaba a las necesidades y restricciones geométricas y espaciales del proyecto.
54
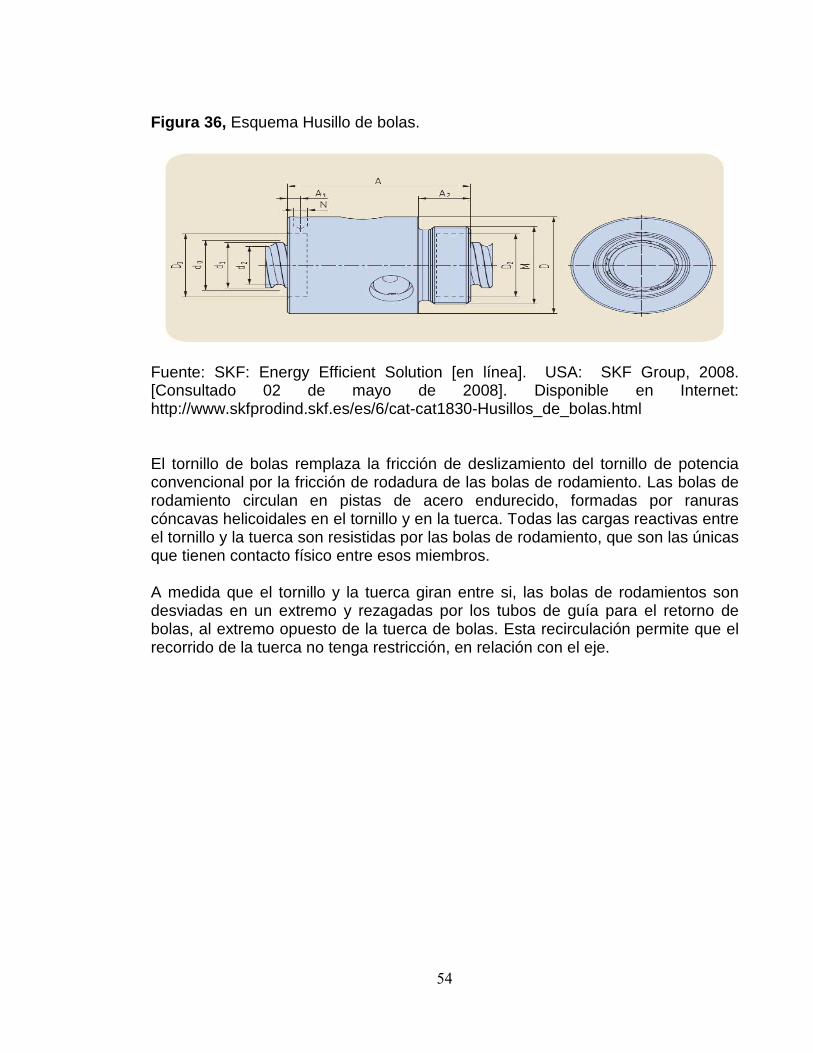
Figura 36, Esquema Husillo de bolas.
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html El tornillo de bolas remplaza la fricción de deslizamiento del tornillo de potencia convencional por la fricción de rodadura de las bolas de rodamiento. Las bolas de rodamiento circulan en pistas de acero endurecido, formadas por ranuras cóncavas helicoidales en el tornillo y en la tuerca. Todas las cargas reactivas entre el tornillo y la tuerca son resistidas por las bolas de rodamiento, que son las únicas que tienen contacto físico entre esos miembros. A medida que el tornillo y la tuerca giran entre si, las bolas de rodamientos son desviadas en un extremo y rezagadas por los tubos de guía para el retorno de bolas, al extremo opuesto de la tuerca de bolas. Esta recirculación permite que el recorrido de la tuerca no tenga restricción, en relación con el eje.
55
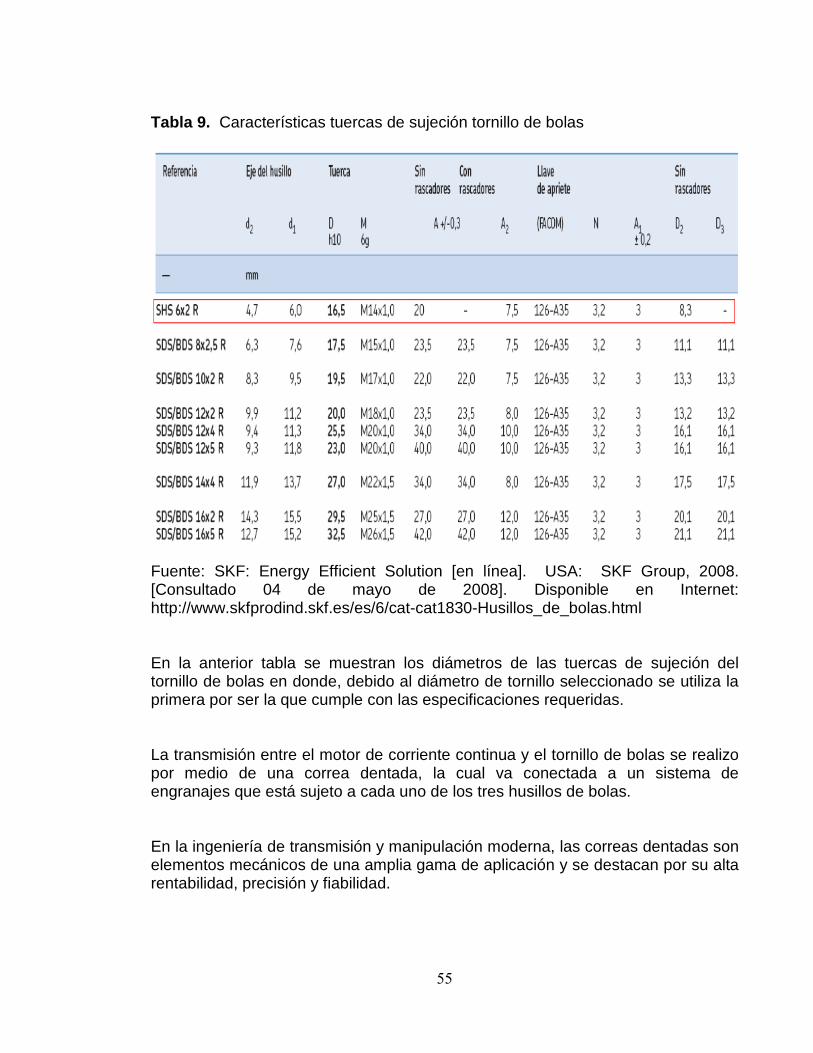
Tabla 9. Características tuercas de sujeción tornillo de bolas
Fuente: SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 04 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html En la anterior tabla se muestran los diámetros de las tuercas de sujeción del tornillo de bolas en donde, debido al diámetro de tornillo seleccionado se utiliza la primera por ser la que cumple con las especificaciones requeridas. La transmisión entre el motor de corriente continua y el tornillo de bolas se realizo por medio de una correa dentada, la cual va conectada a un sistema de engranajes que está sujeto a cada uno de los tres husillos de bolas. En la ingeniería de transmisión y manipulación moderna, las correas dentadas son elementos mecánicos de una amplia gama de aplicación y se destacan por su alta rentabilidad, precisión y fiabilidad.
56
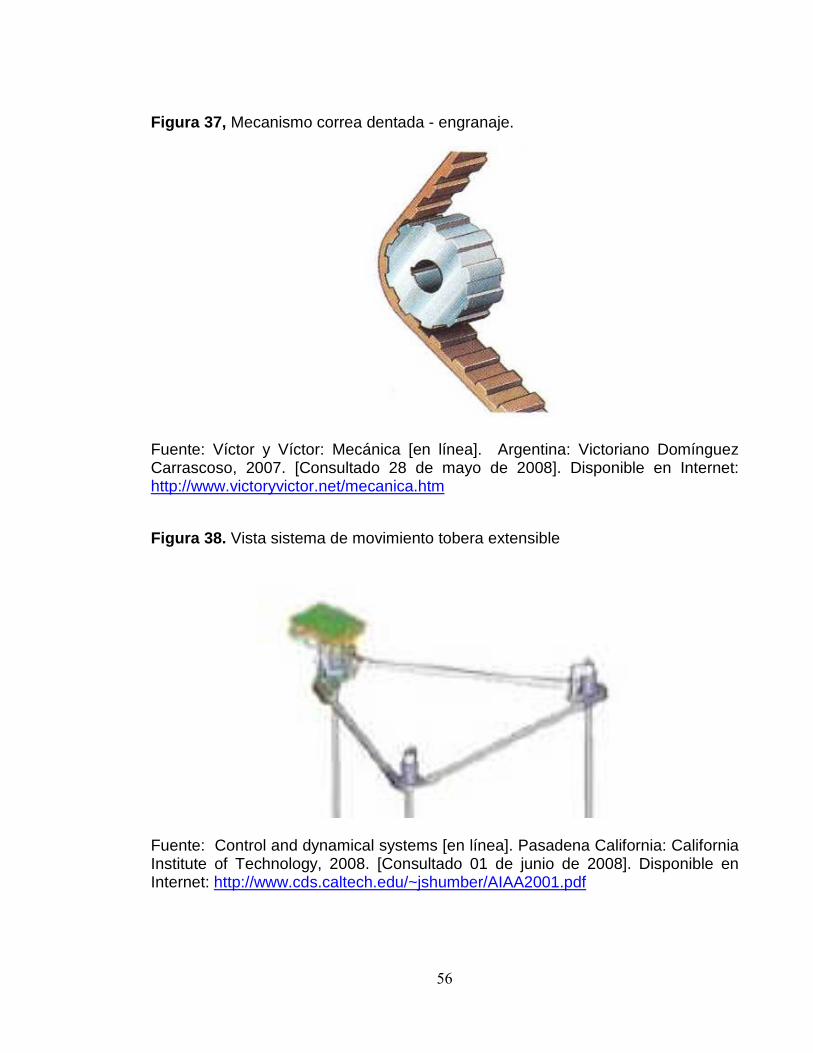
Figura 37, Mecanismo correa dentada - engranaje.
Fuente: Víctor y Víctor: Mecánica [en línea]. Argentina: Victoriano Domínguez Carrascoso, 2007. [Consultado 28 de mayo de 2008]. Disponible en Internet: http://www.victoryvictor.net/mecanica.htm Figura 38. Vista sistema de movimiento tobera extensible
Fuente: Control and dynamical systems [en línea]. Pasadena California: California Institute of Technology, 2008. [Consultado 01 de junio de 2008]. Disponible en Internet: http://www.cds.caltech.edu/~jshumber/AIAA2001.pdf
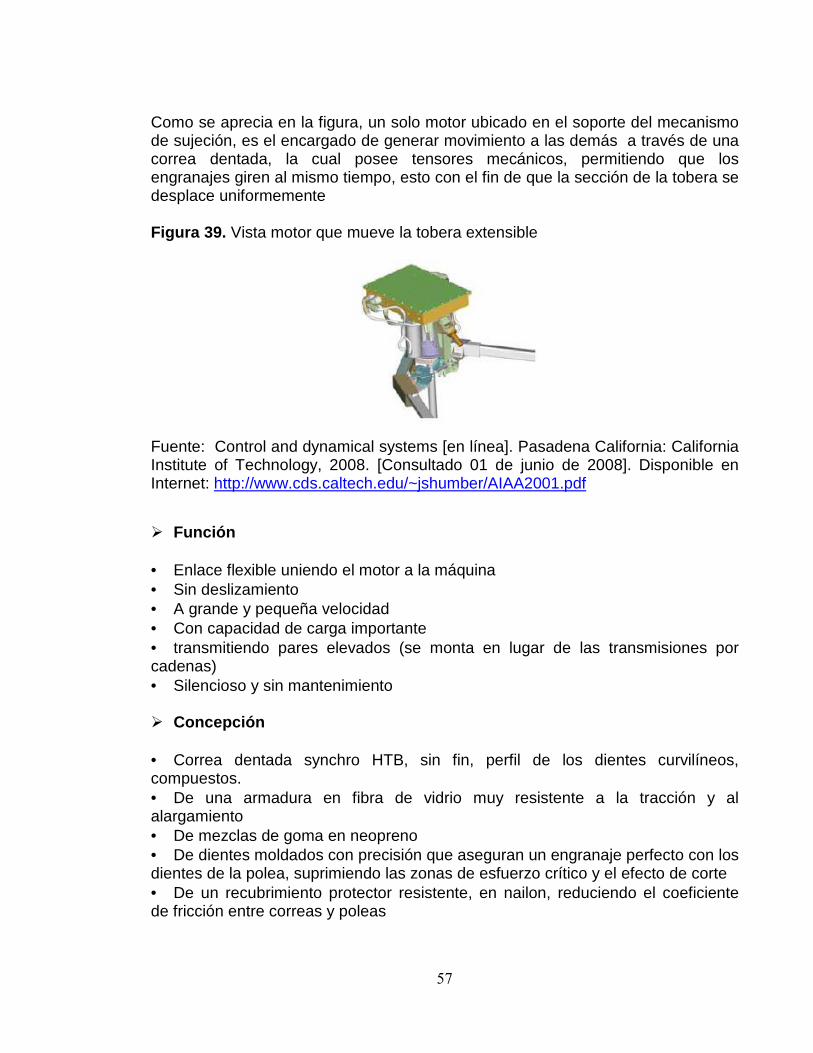
57
Como se aprecia en la figura, un solo motor ubicado en el soporte del mecanismo de sujeción, es el encargado de generar movimiento a las demás a través de una correa dentada, la cual posee tensores mecánicos, permitiendo que los engranajes giren al mismo tiempo, esto con el fin de que la sección de la tobera se desplace uniformemente Figura 39. Vista motor que mueve la tobera extensible
Fuente: Control and dynamical systems [en línea]. Pasadena California: California Institute of Technology, 2008. [Consultado 01 de junio de 2008]. Disponible en Internet: http://www.cds.caltech.edu/~jshumber/AIAA2001.pdf � Función • Enlace flexible uniendo el motor a la máquina • Sin deslizamiento • A grande y pequeña velocidad • Con capacidad de carga importante • transmitiendo pares elevados (se monta en lugar de las transmisiones por cadenas) • Silencioso y sin mantenimiento � Concepción • Correa dentada synchro HTB, sin fin, perfil de los dientes curvilíneos, compuestos. • De una armadura en fibra de vidrio muy resistente a la tracción y al alargamiento • De mezclas de goma en neopreno • De dientes moldados con precisión que aseguran un engranaje perfecto con los dientes de la polea, suprimiendo las zonas de esfuerzo crítico y el efecto de corte • De un recubrimiento protector resistente, en nailon, reduciendo el coeficiente de fricción entre correas y poleas
58
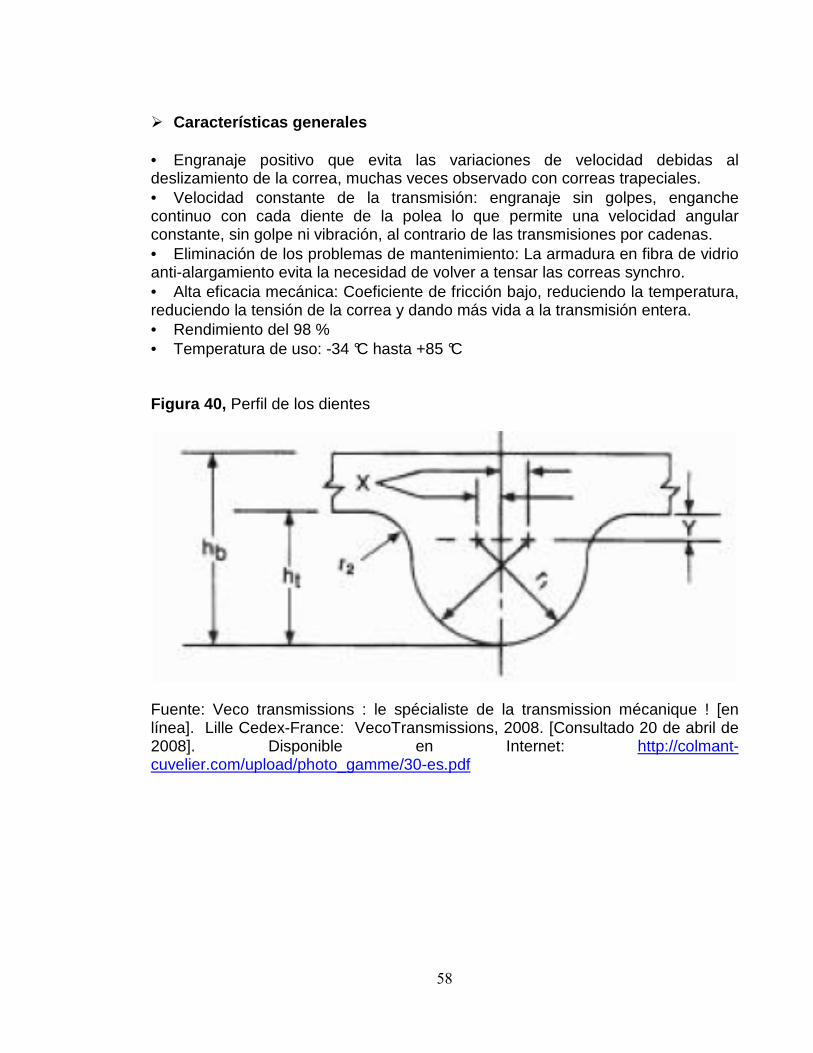
� Características generales • Engranaje positivo que evita las variaciones de velocidad debidas al deslizamiento de la correa, muchas veces observado con correas trapeciales. • Velocidad constante de la transmisión: engranaje sin golpes, enganche continuo con cada diente de la polea lo que permite una velocidad angular constante, sin golpe ni vibración, al contrario de las transmisiones por cadenas. • Eliminación de los problemas de mantenimiento: La armadura en fibra de vidrio anti-alargamiento evita la necesidad de volver a tensar las correas synchro. • Alta eficacia mecánica: Coeficiente de fricción bajo, reduciendo la temperatura, reduciendo la tensión de la correa y dando más vida a la transmisión entera. • Rendimiento del 98 % • Temperatura de uso: -34 °C hasta +85 °C Figura 40, Perfil de los dientes
Fuente: Veco transmissions : le spécialiste de la transmission mécanique ! [en línea]. Lille Cedex-France: VecoTransmissions, 2008. [Consultado 20 de abril de 2008]. Disponible en Internet: http://colmant-cuvelier.com/upload/photo_gamme/30-es.pdf
59
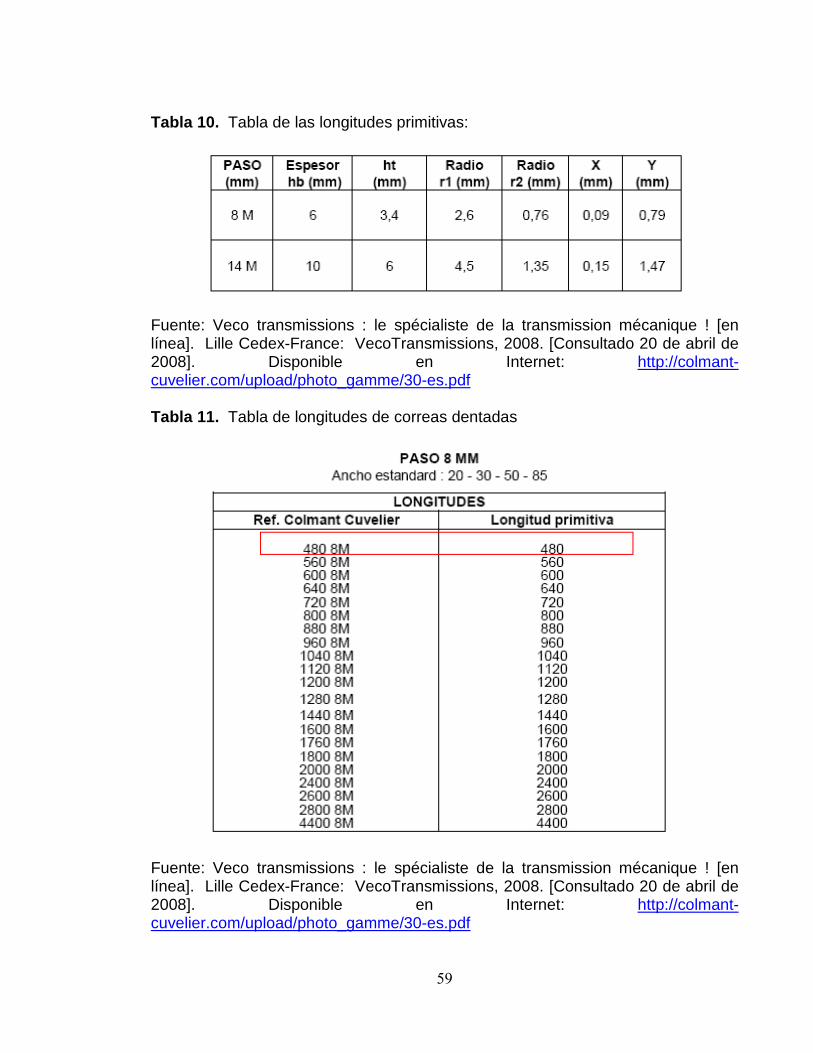
Tabla 10. Tabla de las longitudes primitivas:
Fuente: Veco transmissions : le spécialiste de la transmission mécanique ! [en línea]. Lille Cedex-France: VecoTransmissions, 2008. [Consultado 20 de abril de 2008]. Disponible en Internet: http://colmant-cuvelier.com/upload/photo_gamme/30-es.pdf Tabla 11. Tabla de longitudes de correas dentadas
Fuente: Veco transmissions : le spécialiste de la transmission mécanique ! [en línea]. Lille Cedex-France: VecoTransmissions, 2008. [Consultado 20 de abril de 2008]. Disponible en Internet: http://colmant-cuvelier.com/upload/photo_gamme/30-es.pdf
60
La correa dentada seleccionada dadas las dimensiones de distancia entre los tornillos de bolas es aquella que aparece en la anterior tabla y que posee una longitud primitiva de 480 milímetros con un paso de 8 milímetros por sección, además de un ancho estándar de 20 milímetros. Los engranajes se utilizan para transmitir movimiento cuando dos ejes están muy próximos entre sí. � Tipos de Engranajes . Según la forma de los dientes y la disposición de los ejes: • Recto. Cuando los dientes de los engranajes son paralelos a los ejes que los soportan. En un sistema de engranajes, algunos llaman Piñón al de menor número de dientes y Rueda Dentada al de mayor número. • Cónico. Cuando la transmisión se efectúa en ángulo recto (90°). Los dientes pueden ser rectos, oblicuos o en espiral. • Helicoidales. La forma del diente es una hélice cilíndrica y curvada. Sirven para transmitir movimiento entre ejes paralelos y oblicuos. • Hipoidales. Se utilizan para transmitir movimiento entre ejes oblicuos. La forma de sus dientes es esférica. • Tornillo Sin fin. Se usan para obtener grandes reducciones de velocidad entre ejes que no se interceptan pero hacen un ángulo de 90° el uno con respecto al otro. El tornillo sin fin tiene uno o varios filetes que encajan en los dientes de la rueda.
Para la aplicación específica en el proyecto se seleccionaron tres engranajes según la norma DIN en acero inoxidable AISI-304 L y con un paso de 8 milímetros Figura 41, Engranaje
Fuente: Wikipedia: la enciclopedia libre [en línea]. Florida: Wikimedia Foundation, 2008. [Consultado 15 de junio de 2008]. Disponible en Internet http://es.wikipedia.org/wiki/Imagen:Spur_Gear_12mm%2C_18t.svg
61
Finalmente en esta primera sección principal dentro del proyecto se encuentran un soporte en acero para sostener los motores, el mecanismo de engranajes junto con la correa dentada. Cuenta además con unas palancas de apoyo las cuales van sujetas a la tobera en su sección recogida para darle una mayor estabilidad al mecanismo de sujeción y desplazamiento de la tobera extensible.
Figura 42, Soporte mecanismo de sujeción
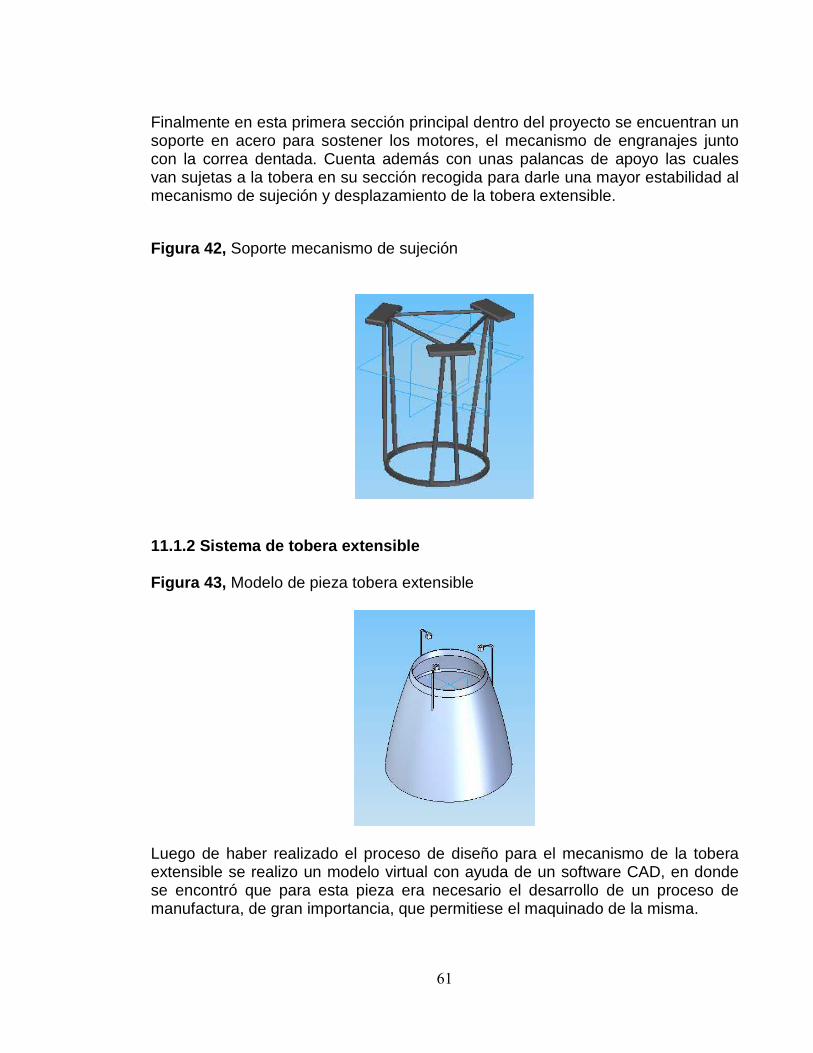
11.1.2 Sistema de tobera extensible Figura 43, Modelo de pieza tobera extensible
Luego de haber realizado el proceso de diseño para el mecanismo de la tobera extensible se realizo un modelo virtual con ayuda de un software CAD, en donde se encontró que para esta pieza era necesario el desarrollo de un proceso de manufactura, de gran importancia, que permitiese el maquinado de la misma.
62
Después de analizar los diferentes procesos de manufactura utilizados para el mecanizado de piezas metálicas, se concluyo que para este proyecto se utilizara el proceso de torneado, el cual consiste en los mecanizados que se realizan en, los ejes de revolución otros componentes que tengan mecanizados cilíndricos concéntricos o perpendiculares a un eje de rotación tanto exteriores como interiores. Los mecanizados complejos y de precisión de realizan en tornos CNC, y las series grandes de piezas se realizan en torno automático. Utilizando un torno CNC, garantizamos acabados de buena calidad y una buena precisión en las medidas. De acuerdo con las especificaciones generales del proyecto esta pieza debe ser elaborada en acero, es recomendable utilizar un acero 316 con las siguientes características: � AISI 316 Aleación: C% 0.08 máx. Cr% 17 Ni% 12 Mo% 2.5 � Denominación según: DIN: X2CrNiMo1812 W AISI 316 No 1.4435
� Descripción: Es un acero inoxidable austenítico, con bajo contenido de C alta resistencia a la corrosión energética e intercristalina resistente contra muchos agentes químicos agresivos como también a la atmósfera marina. Su aplicación es frecuente en la industria alimenticia, papelera, construcción y piezas soldadas. Específicamente: Cubos de licores, calderas para el cocimiento de sales, toneles para levadura.
� Propiedades mecánicas:
• Dureza: 120-180 Brinell • Resistencia a la tracción: 46-71 kg/mm^2 • Laminas: • Medias disponibles: en 2 X 1 mts, 4´ x 8´ pies y/o 3´x 10´ pies • Acabado: No. 1 desde 1/2" – 3/16" � Acabado: 2B 1/8" � Redondos: Tolerancia H-11, largos de 3 – 6 mts � Diámetros desde 3/8" hasta 2.1/2"
Después de tener la tobera se le aplica un tratamiento con material térmico ablativo el cual es un material ablativo(CERAMICO) es aquel material fungible que protege a las naves espaciales y a los satélites recuperables contra el calor de millares de grados engendrado por su roce con el aire a velocidades supersónicas.
63
Los ablativos son mezclas a base de resinas sintéticas, tales como epóxidos, silicona, o nylon; reforzadas con una armadura de fibras refractarias (sílice, amianto, etc.). Se utilizan formando con ellos una coraza aplicada exteriormente sobre las partes frontales de las piezas espaciales que deben soportar el choque térmico. Sus dos cualidades primordiales son poseer la menor conductibilidad térmica posible y el máximo calor latente de cambio de estado.
La acción protectora de la coraza de ablativo es cuádruple. En primer lugar, al cambiar de estado, la capa superficial absorbe y retiene una cantidad de calor que, sin ella, habría atravesado la pared de la pieza en cuestión. Por otra parte, la materia fundida y arrastrada por el viento lleva con ella una gran parte de ese calor. Además, los productos gaseosos de la sublimación o de la vaporización forman ante la coraza un colchón aislante que mantiene apartada la onda de choque agente del calentamiento. Por último, la capa residual de ablativo que no se ha fundido adquiere una consistencia esponjosa que le confiere propiedades aislantes suplementarias, ya que, de por sí el ablativo es un mal conductor térmico.
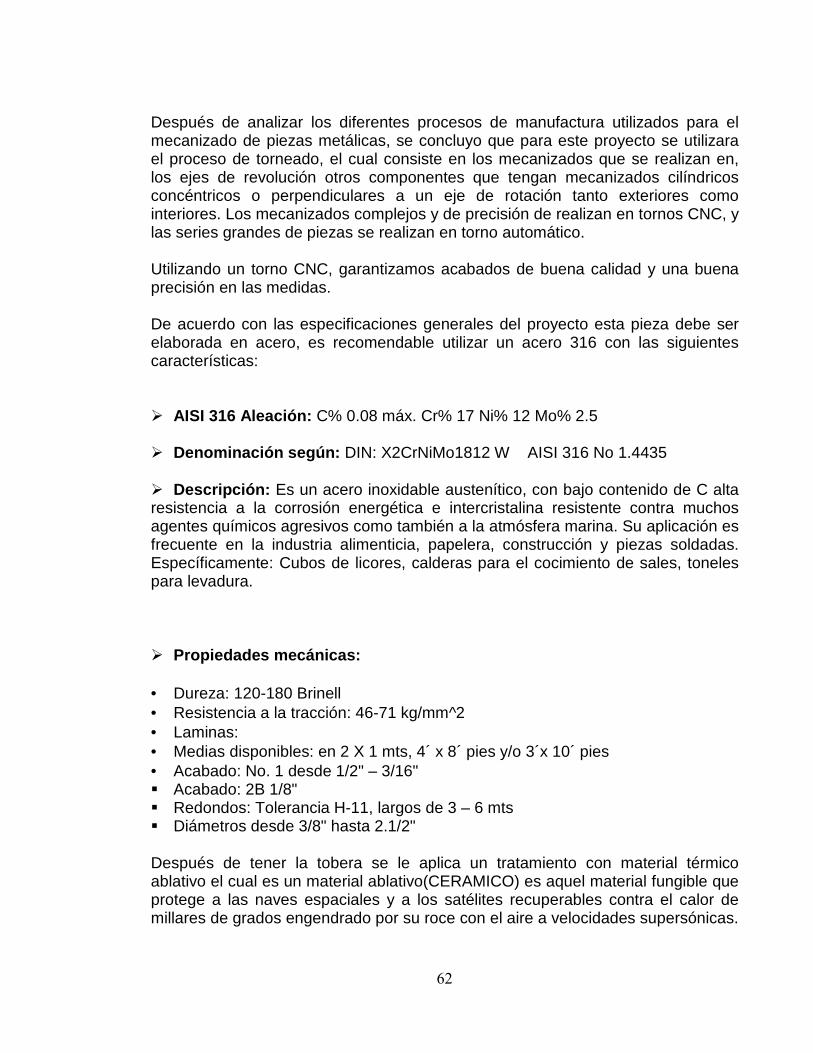
11.1.3 Sistema de modificación del empuje vectorial. Figura 44, Modelo sistema de modificación de empuje vectorial
Para el diseño del sistema de la modificación del empuje vectorial se opto por realizar un mecanismo que consta de cuatro aletas curvas en acero, revestidas con material ablativo, unidas entre sí. Dichas aletas van unidas a la tobera extensible mediante un sistema de bolas que permita su libre movimiento con relación a esta. Por otro lado se sujeta en cuatro puntos equidistantes entre si un
64
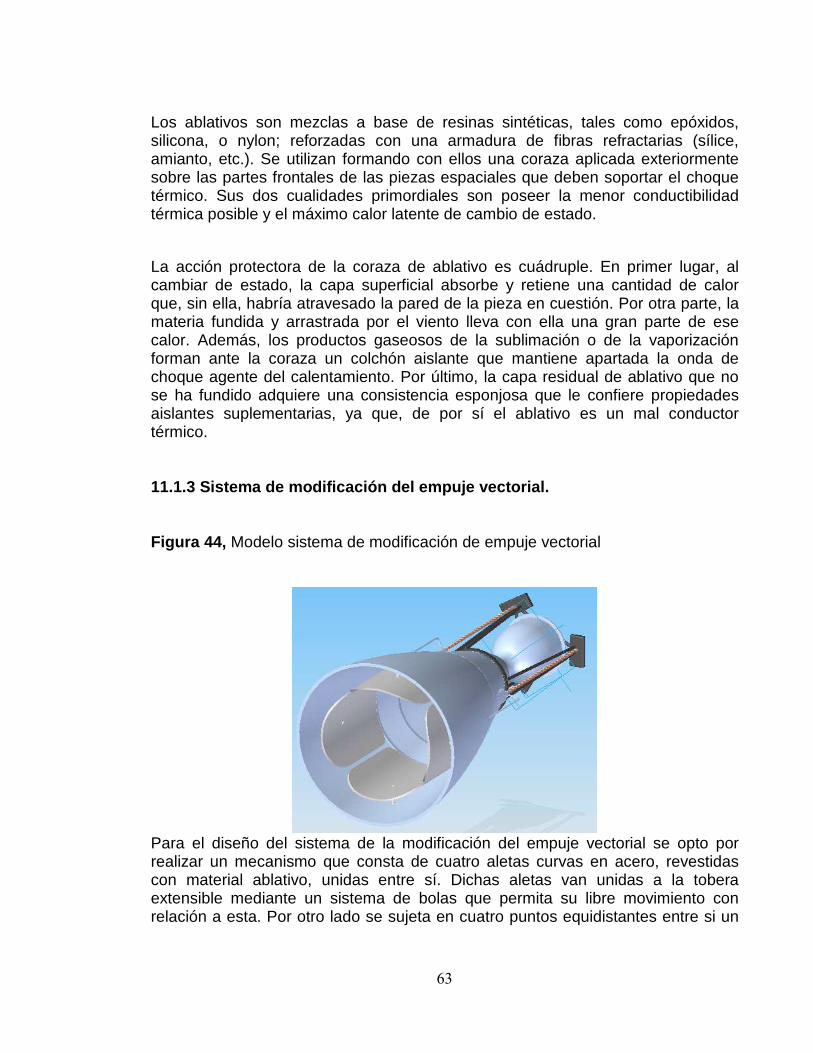
rotula junto con un tornillo el cual estará sujeto a una turca que permitirá generar desplazamientos en este sistema mediante motores de corriente continua. Figura 45. Sistema de direccionamiento aletas
11.2 SELECCIÓN DE ACTUADORES Para el desarrollo del proyecto es de gran importancia seleccionar los actuadores adecuados para garantizar un óptimo funcionamiento del mecanismo de la tobera extensible y del sistema para la modificación del empuje vectorial. Por esta razón se seleccionaron motores de corriente continua que cumplían con los requisitos geométricos espaciales y de peso para el proyecto del cohete en general. Los que motores seleccionados son unos motores DC sin escobillas, en estos la conmutación que realizan las escobillas es reemplazada por una conmutación electrónica. Un microprocesador se encarga de ir energizando la bobina de estator adecuada para conseguir el arrastre del rotor. En este caso todos los polos son independientes, es el sistema más simple de alambrar y de controlar pero produce una ondulación en el torque.
Una variación consiste en un bobinado en el estator similar al de un motor de AC, electrónicamente se controla la alimentación para provocar un campo cercano al sinusoidal, este modelo es más suave pero más complejo, se le conoce como motor AC sin escobillas ( brushless ac motor).
65
Figura 46. Modelo motor DC
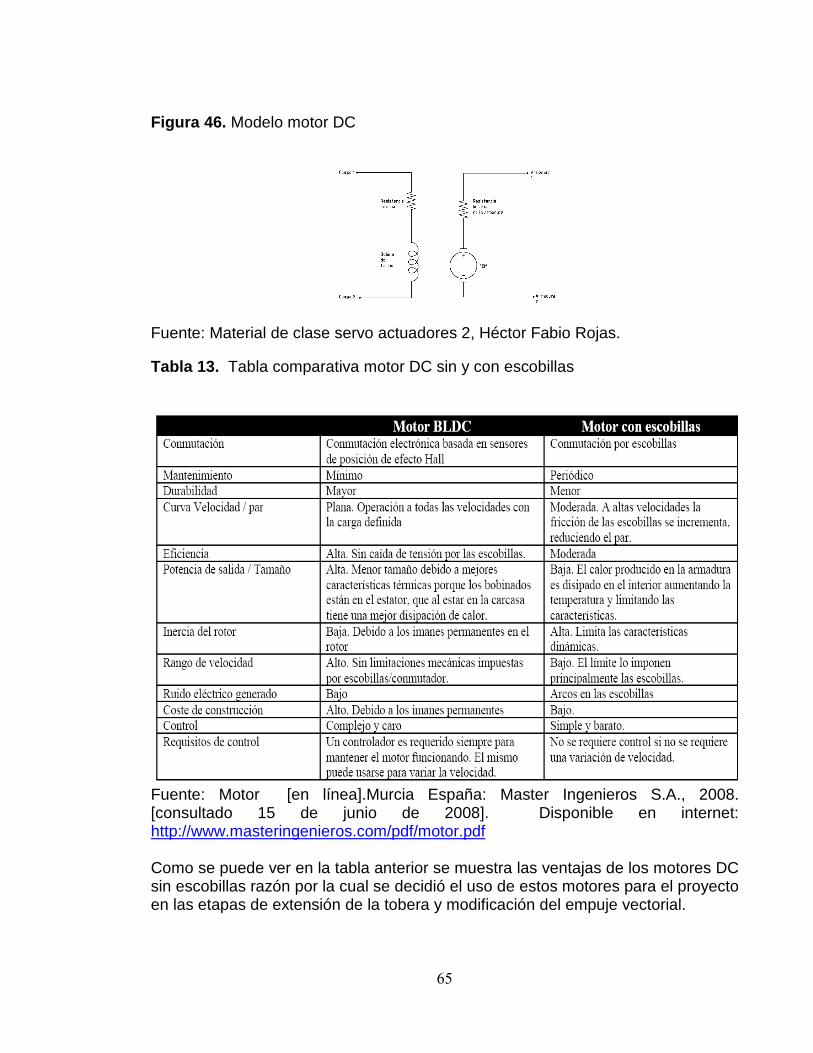
Fuente: Material de clase servo actuadores 2, Héctor Fabio Rojas. Tabla 13. Tabla comparativa motor DC sin y con escobillas
Fuente: Motor [en línea].Murcia España: Master Ingenieros S.A., 2008. [consultado 15 de junio de 2008]. Disponible en internet: http://www.masteringenieros.com/pdf/motor.pdf Como se puede ver en la tabla anterior se muestra las ventajas de los motores DC sin escobillas razón por la cual se decidió el uso de estos motores para el proyecto en las etapas de extensión de la tobera y modificación del empuje vectorial.
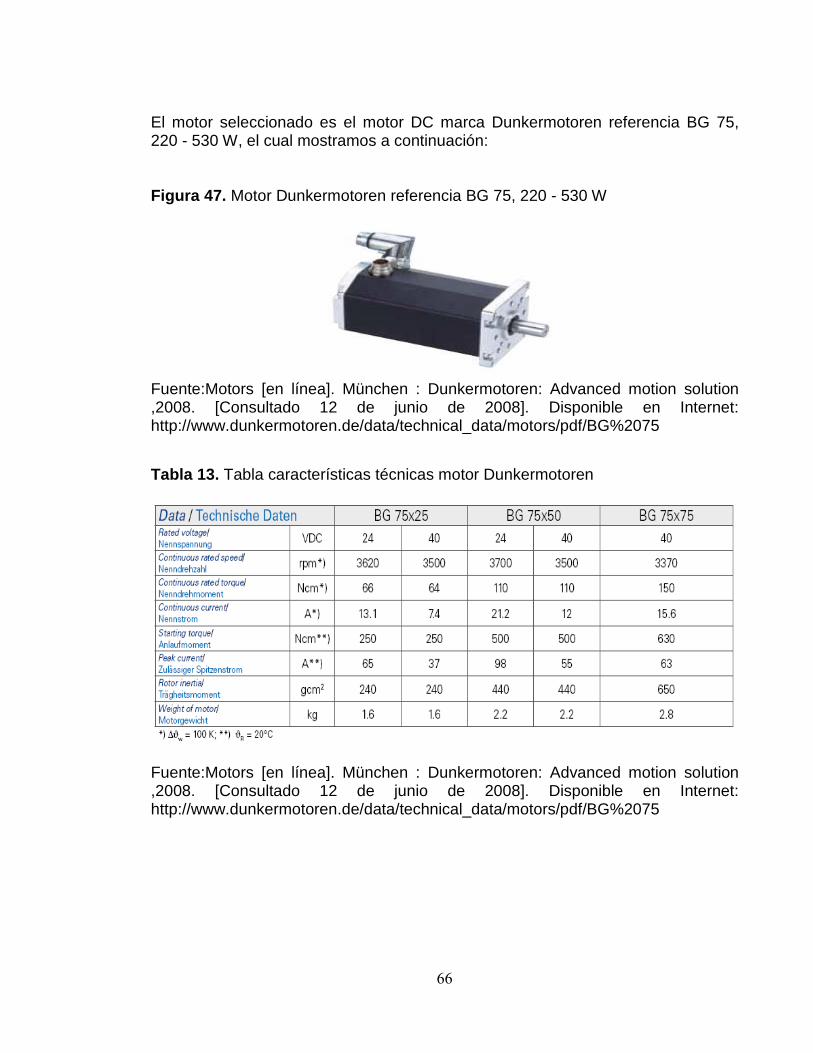
66
El motor seleccionado es el motor DC marca Dunkermotoren referencia BG 75, 220 - 530 W, el cual mostramos a continuación: Figura 47. Motor Dunkermotoren referencia BG 75, 220 - 530 W
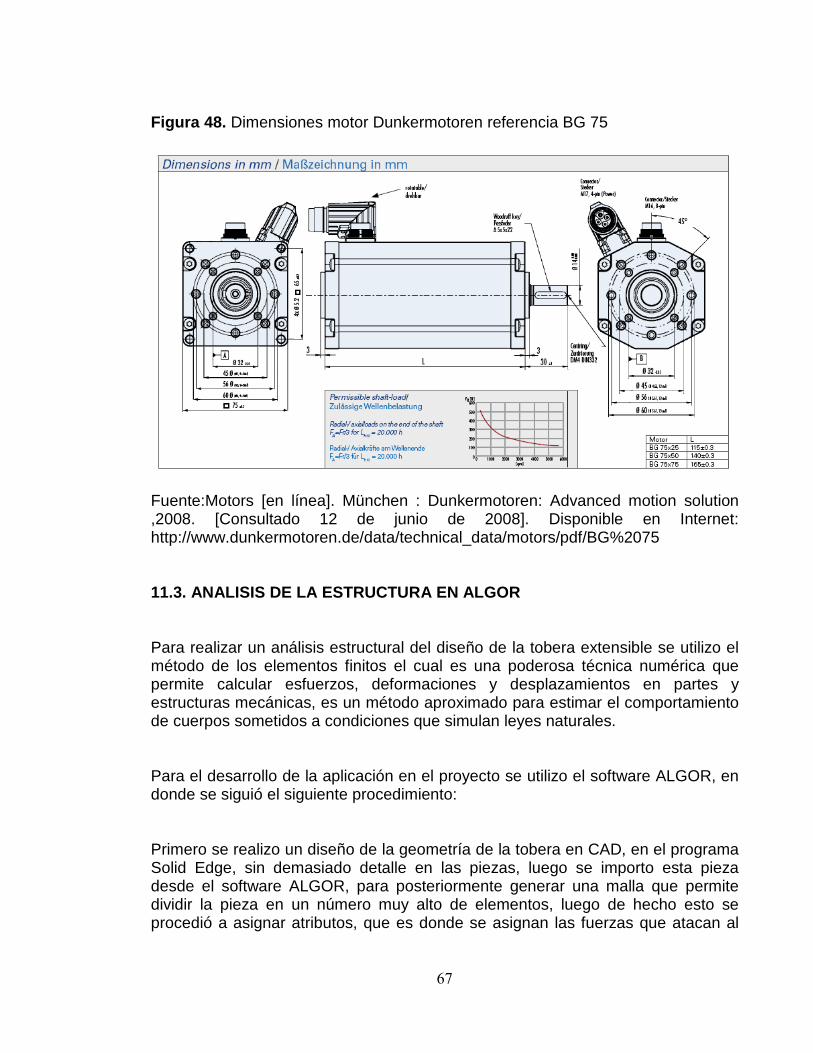
Fuente:Motors [en línea]. München : Dunkermotoren: Advanced motion solution ,2008. [Consultado 12 de junio de 2008]. Disponible en Internet: http://www.dunkermotoren.de/data/technical_data/motors/pdf/BG%2075 Tabla 13. Tabla características técnicas motor Dunkermotoren
Fuente:Motors [en línea]. München : Dunkermotoren: Advanced motion solution ,2008. [Consultado 12 de junio de 2008]. Disponible en Internet: http://www.dunkermotoren.de/data/technical_data/motors/pdf/BG%2075
67
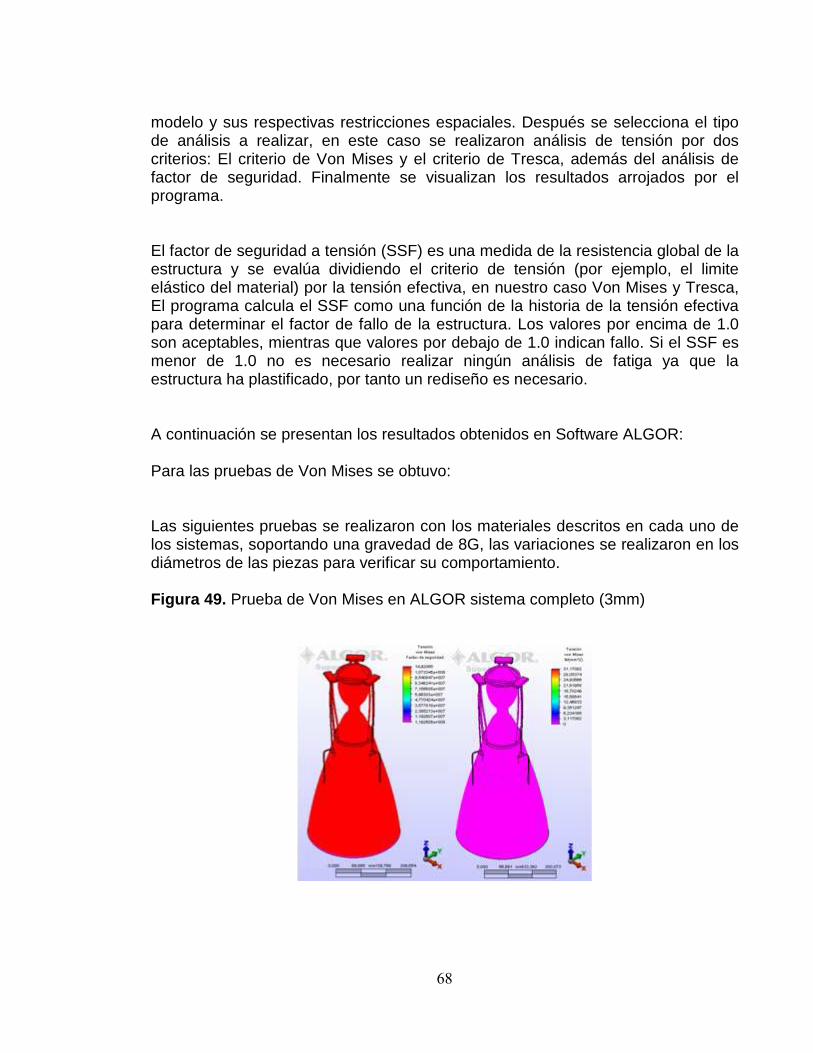
Figura 48. Dimensiones motor Dunkermotoren referencia BG 75
Fuente:Motors [en línea]. München : Dunkermotoren: Advanced motion solution ,2008. [Consultado 12 de junio de 2008]. Disponible en Internet: http://www.dunkermotoren.de/data/technical_data/motors/pdf/BG%2075
11.3. ANALISIS DE LA ESTRUCTURA EN ALGOR
Para realizar un análisis estructural del diseño de la tobera extensible se utilizo el método de los elementos finitos el cual es una poderosa técnica numérica que permite calcular esfuerzos, deformaciones y desplazamientos en partes y estructuras mecánicas, es un método aproximado para estimar el comportamiento de cuerpos sometidos a condiciones que simulan leyes naturales. Para el desarrollo de la aplicación en el proyecto se utilizo el software ALGOR, en donde se siguió el siguiente procedimiento: Primero se realizo un diseño de la geometría de la tobera en CAD, en el programa Solid Edge, sin demasiado detalle en las piezas, luego se importo esta pieza desde el software ALGOR, para posteriormente generar una malla que permite dividir la pieza en un número muy alto de elementos, luego de hecho esto se procedió a asignar atributos, que es donde se asignan las fuerzas que atacan al
68
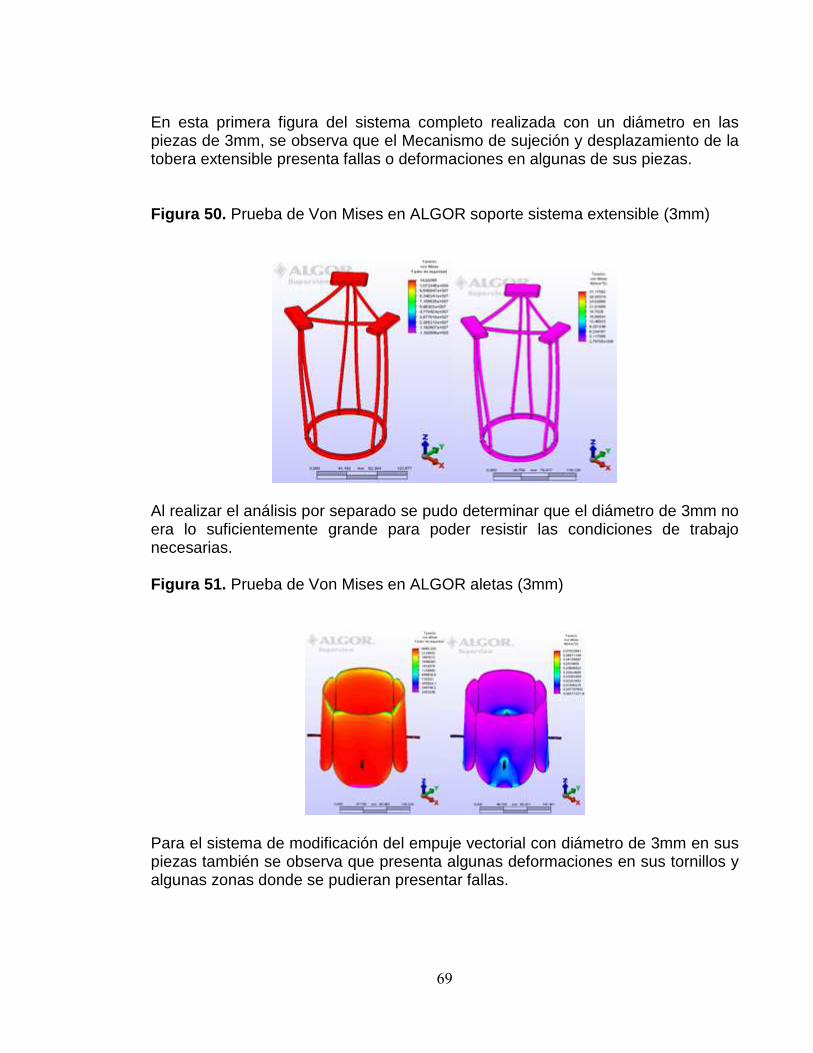
modelo y sus respectivas restricciones espaciales. Después se selecciona el tipo de análisis a realizar, en este caso se realizaron análisis de tensión por dos criterios: El criterio de Von Mises y el criterio de Tresca, además del análisis de factor de seguridad. Finalmente se visualizan los resultados arrojados por el programa. El factor de seguridad a tensión (SSF) es una medida de la resistencia global de la estructura y se evalúa dividiendo el criterio de tensión (por ejemplo, el limite elástico del material) por la tensión efectiva, en nuestro caso Von Mises y Tresca, El programa calcula el SSF como una función de la historia de la tensión efectiva para determinar el factor de fallo de la estructura. Los valores por encima de 1.0 son aceptables, mientras que valores por debajo de 1.0 indican fallo. Si el SSF es menor de 1.0 no es necesario realizar ningún análisis de fatiga ya que la estructura ha plastificado, por tanto un rediseño es necesario. A continuación se presentan los resultados obtenidos en Software ALGOR: Para las pruebas de Von Mises se obtuvo: Las siguientes pruebas se realizaron con los materiales descritos en cada uno de los sistemas, soportando una gravedad de 8G, las variaciones se realizaron en los diámetros de las piezas para verificar su comportamiento. Figura 49. Prueba de Von Mises en ALGOR sistema completo (3mm)
69
En esta primera figura del sistema completo realizada con un diámetro en las piezas de 3mm, se observa que el Mecanismo de sujeción y desplazamiento de la tobera extensible presenta fallas o deformaciones en algunas de sus piezas. Figura 50. Prueba de Von Mises en ALGOR soporte sistema extensible (3mm)
Al realizar el análisis por separado se pudo determinar que el diámetro de 3mm no era lo suficientemente grande para poder resistir las condiciones de trabajo necesarias. Figura 51. Prueba de Von Mises en ALGOR aletas (3mm)
Para el sistema de modificación del empuje vectorial con diámetro de 3mm en sus piezas también se observa que presenta algunas deformaciones en sus tornillos y algunas zonas donde se pudieran presentar fallas.
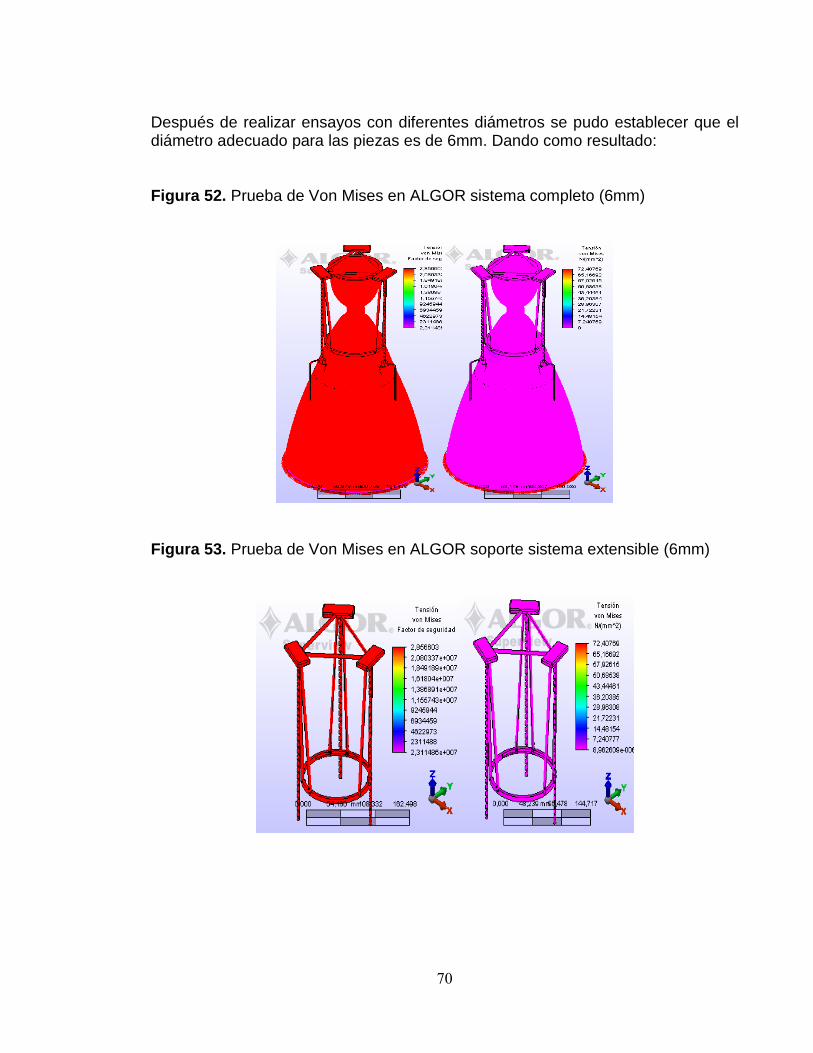
70
Después de realizar ensayos con diferentes diámetros se pudo establecer que el diámetro adecuado para las piezas es de 6mm. Dando como resultado: Figura 52. Prueba de Von Mises en ALGOR sistema completo (6mm)
Figura 53. Prueba de Von Mises en ALGOR soporte sistema extensible (6mm)
71
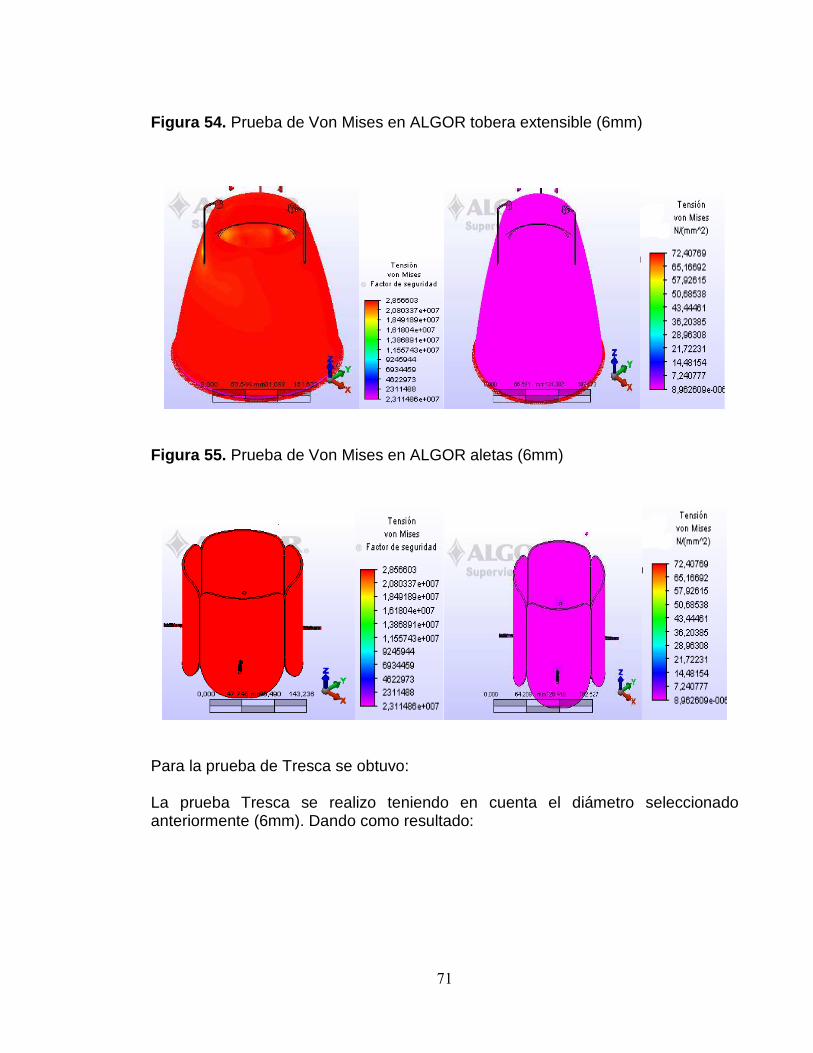
Figura 54. Prueba de Von Mises en ALGOR tobera extensible (6mm)
Figura 55. Prueba de Von Mises en ALGOR aletas (6mm)
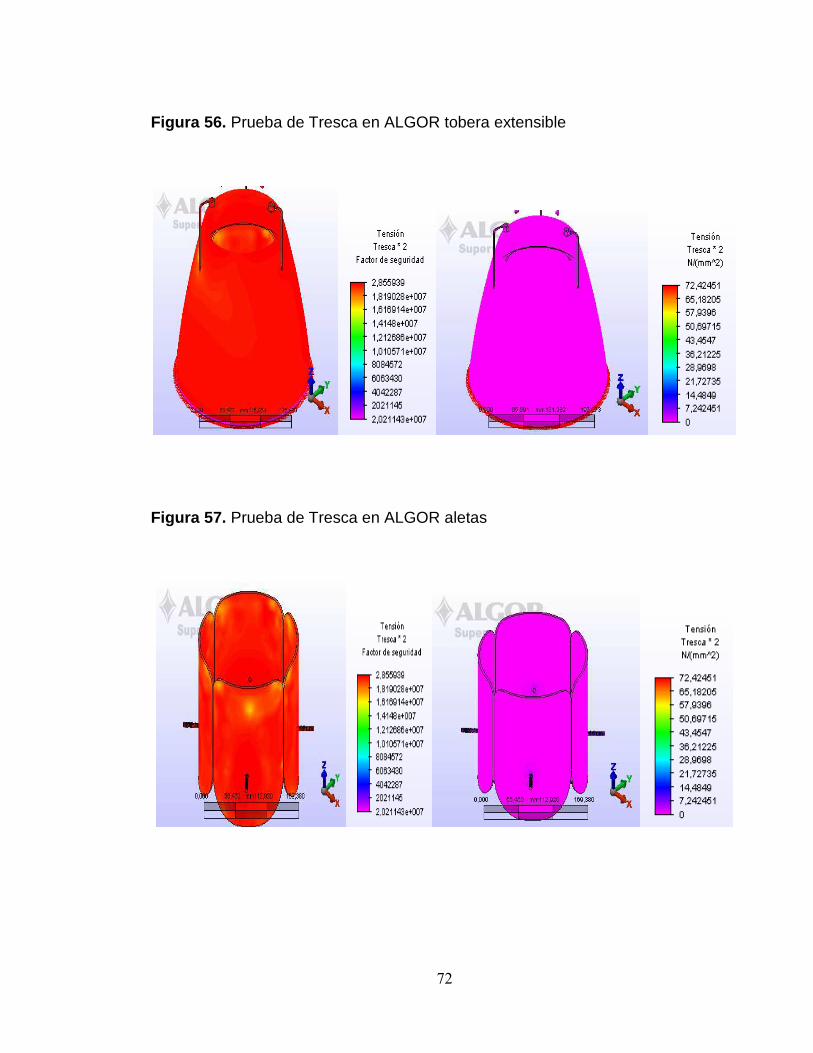
Para la prueba de Tresca se obtuvo: La prueba Tresca se realizo teniendo en cuenta el diámetro seleccionado anteriormente (6mm). Dando como resultado:
72
Figura 56. Prueba de Tresca en ALGOR tobera extensible
Figura 57. Prueba de Tresca en ALGOR aletas
73
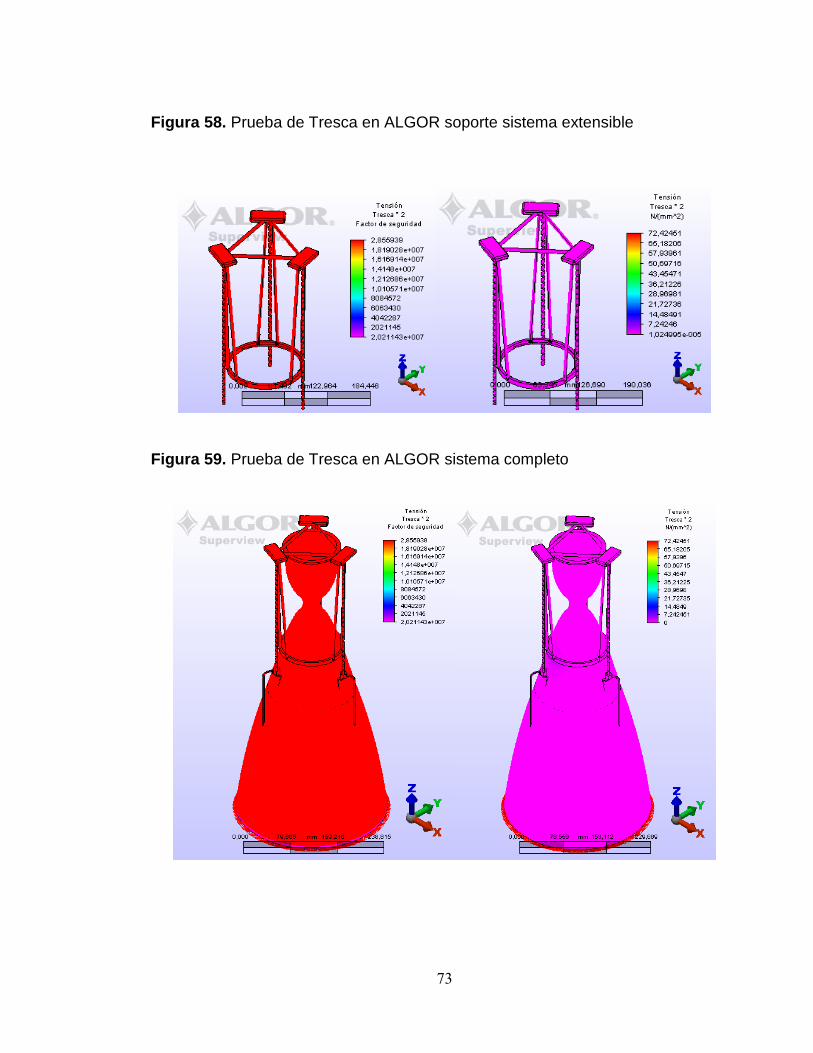
Figura 58. Prueba de Tresca en ALGOR soporte sistema extensible
Figura 59. Prueba de Tresca en ALGOR sistema completo
74
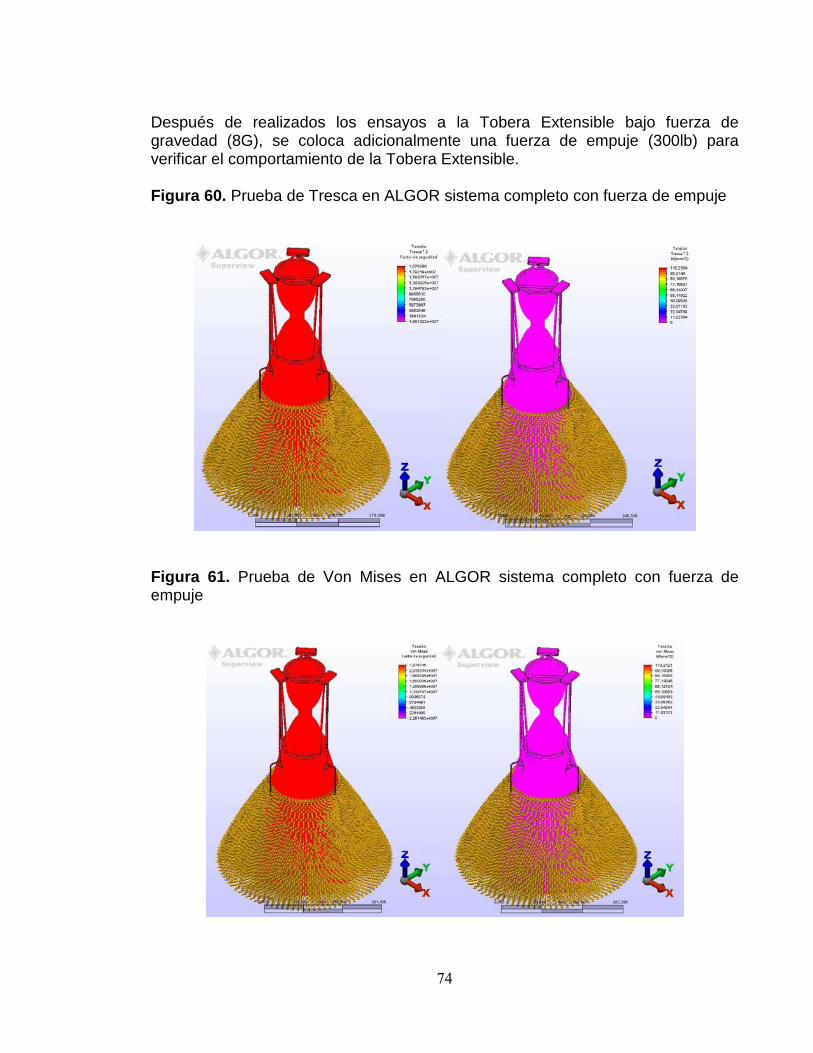
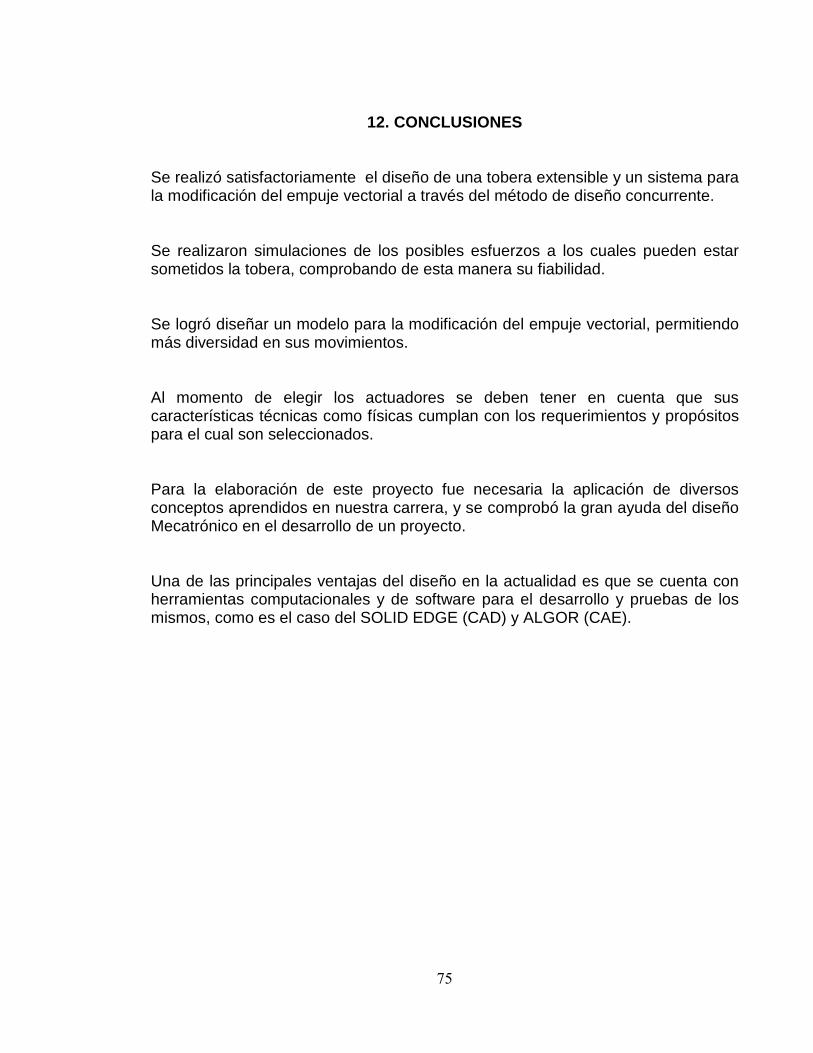
Después de realizados los ensayos a la Tobera Extensible bajo fuerza de gravedad (8G), se coloca adicionalmente una fuerza de empuje (300lb) para verificar el comportamiento de la Tobera Extensible. Figura 60. Prueba de Tresca en ALGOR sistema completo con fuerza de empuje
Figura 61. Prueba de Von Mises en ALGOR sistema completo con fuerza de empuje
75
12. CONCLUSIONES Se realizó satisfactoriamente el diseño de una tobera extensible y un sistema para la modificación del empuje vectorial a través del método de diseño concurrente. Se realizaron simulaciones de los posibles esfuerzos a los cuales pueden estar sometidos la tobera, comprobando de esta manera su fiabilidad. Se logró diseñar un modelo para la modificación del empuje vectorial, permitiendo más diversidad en sus movimientos. Al momento de elegir los actuadores se deben tener en cuenta que sus características técnicas como físicas cumplan con los requerimientos y propósitos para el cual son seleccionados. Para la elaboración de este proyecto fue necesaria la aplicación de diversos conceptos aprendidos en nuestra carrera, y se comprobó la gran ayuda del diseño Mecatrónico en el desarrollo de un proyecto. Una de las principales ventajas del diseño en la actualidad es que se cuenta con herramientas computacionales y de software para el desarrollo y pruebas de los mismos, como es el caso del SOLID EDGE (CAD) y ALGOR (CAE).
76
BIBLIOGRAFIA
Algor V19.30.00 [CD-ROM]. FEMPRO, California: Autodesk, 2000. Benavent García José Manuel, Electrónica de potencia: teoría de aplicaciones. Universidad Politécnica de Valencia, 340 p.. Control and dynamical systems [en línea]. Pasadena, California: California Institute of Technology, 2008. [Consultado 10 de junio de 2008]. Disponible en Internet: http://www.cds.caltech.edu/~jshumber/AIAA2001.pdf Veco transmissions : le spécialiste de la transmission mécanique ! [en línea]. Lille Cedex-France: VecoTransmissions, 2008. [Consultado 20 de abril de 2008]. Disponible en Internet: http://colmant-cuvelier.com/upload/photo_gamme/30-es.pdf Robert L Mott, Virgilio González y Pozo. Diseño de elementos de maquinas. Editorial perason educacion cuarta edición, 790p. Motors [en línea]. München : Dunkermotoren: Advanced motion solution ,2008. [Consultado 12 de junio de 2008]. Disponible en Internet: http://www.dunkermotoren.de/data/technical_data/motors/pdf/BG%2075
Motor [en línea].Murcia España: Master Ingenieros S.A., 2008. [consultado 15 de junio de 2008]. Disponible en internet: http://www.masteringenieros.com/pdf/motor.pdf
Rojas Héctor Fabio, Servoactuadores 2. Motores DC. Universidad Autónoma de Occidente. Disponible en: http://www.uao.edu.co/ Sabogal Roger Bernardo, Diseño mecatrónico. Especificaciones del producto.pdf, selección de conceptos.pdf, Arquitectura de productos.pdf, diseño para manufactura.pdf, diseño industrial.pdf, generación de conceptos.pdf, prueba de conceptos.pdf. Universidad Autónoma de Occidente. Disponible en: http://www.uao.edu.co/ Solid Edge V19 [DVD]. UGS, Alemania: Siemens, 2006. 1 DVD.
77
SKF: Energy Efficient Solution [en línea]. USA: SKF Group, 2008. [Consultado 02 de mayo de 2008]. Disponible en Internet: http://www.skfprodind.skf.es/es/6/cat-cat1830-Husillos_de_bolas.html
Victor y Victor: Mecanica [en línea]. Argentina: Victoriano Dominguez Carrascoso, 2007. [Consultado 28 de mayo de 2008]. Disponible en Internet: http://www.victoryvictor.net/mecanica.htm
Wikipedia: la enciclopedia libre [en línea]. Florida: Wikimedia Foundation, 2008. [Consultado 15 de junio de 2008]. Disponible en Internet http://es.wikipedia.org/wiki/Imagen:Spur_Gear_12mm%2C_18t.svg
78
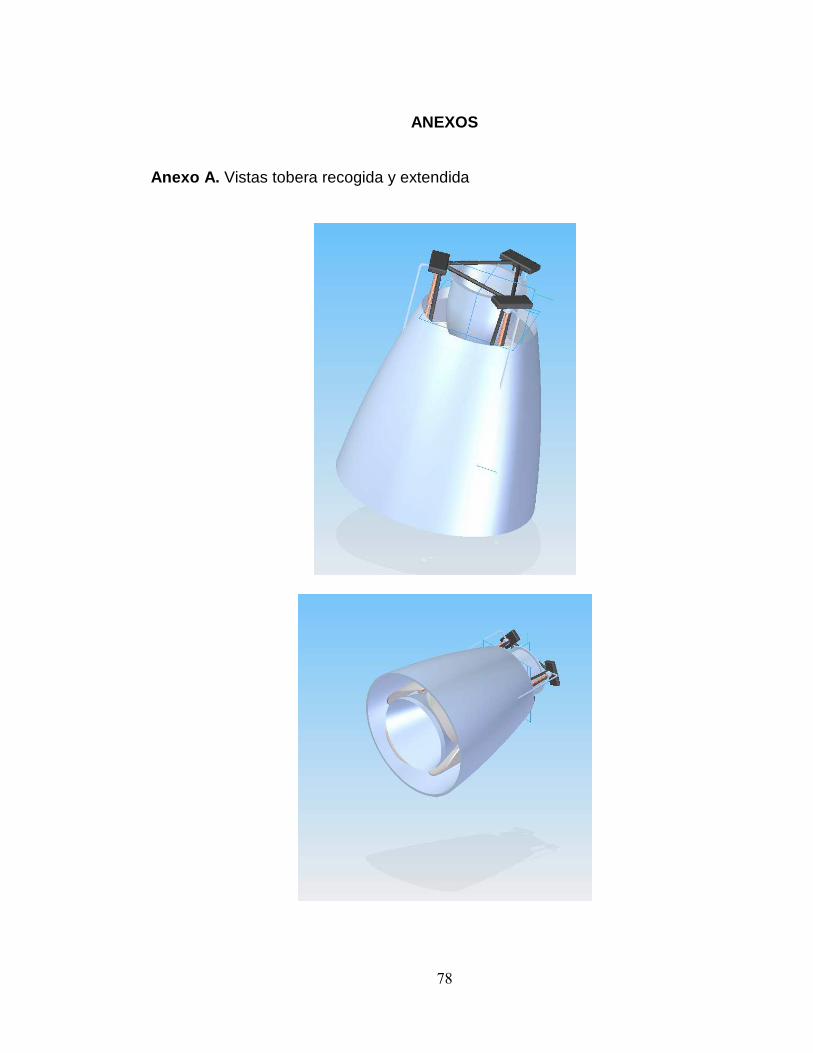
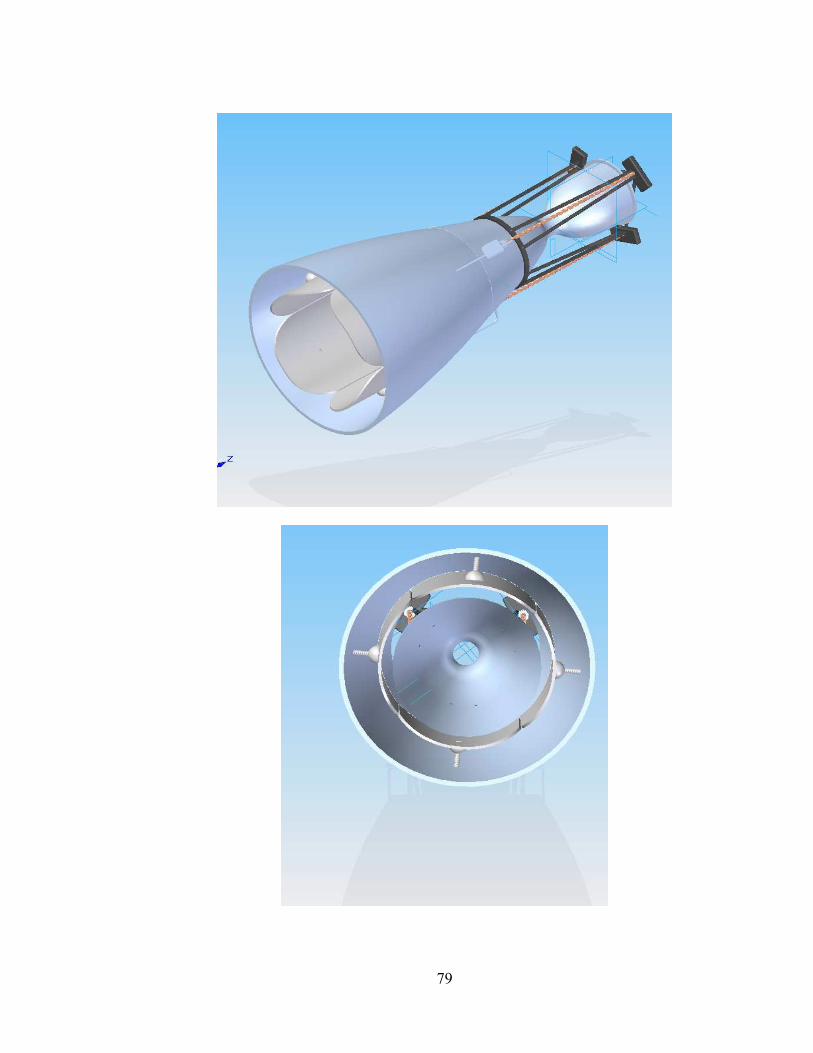
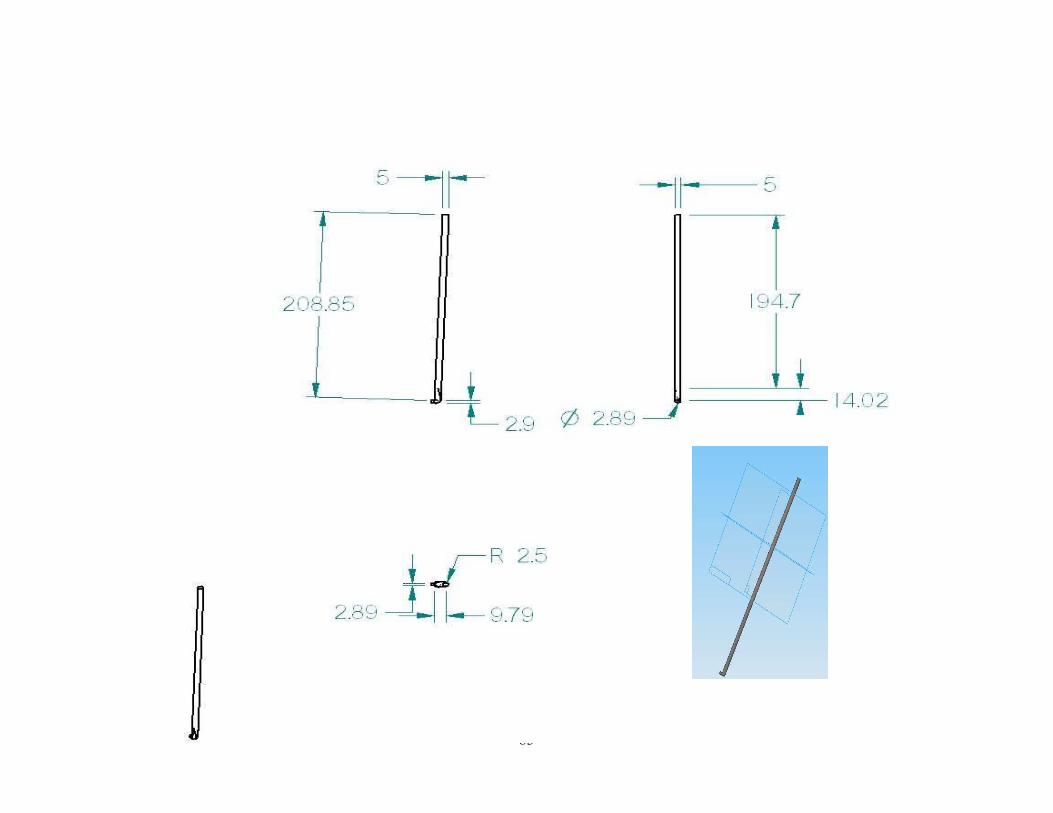
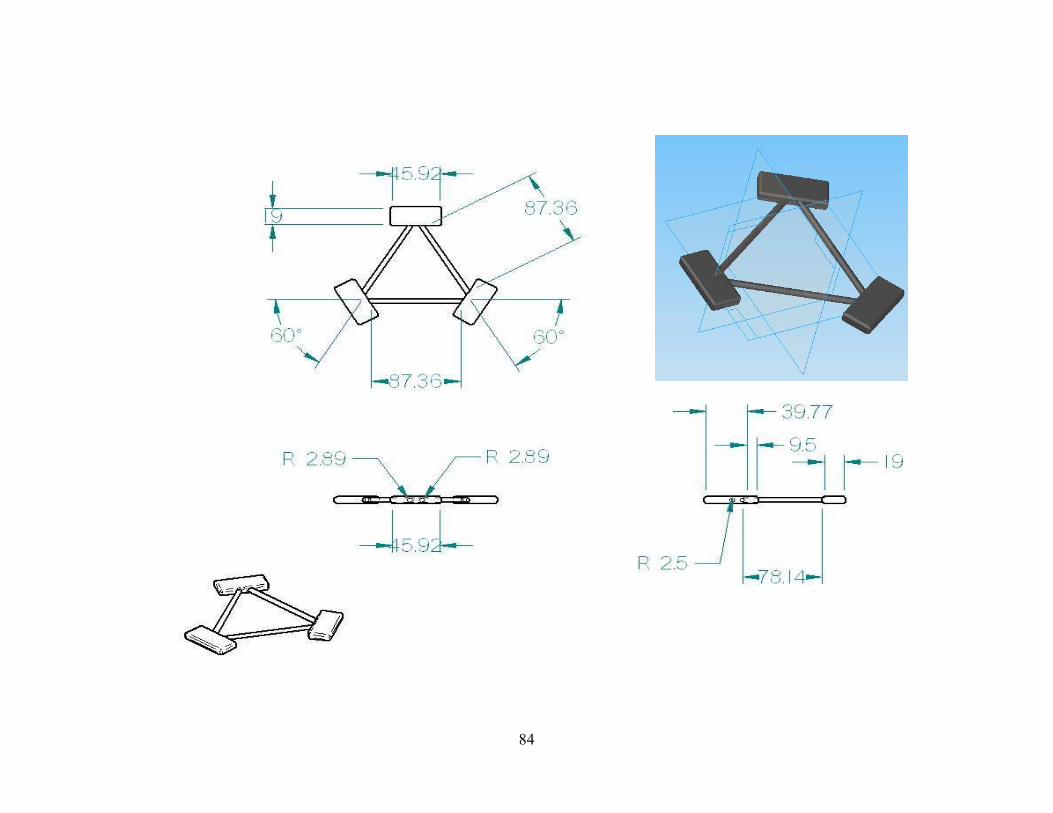
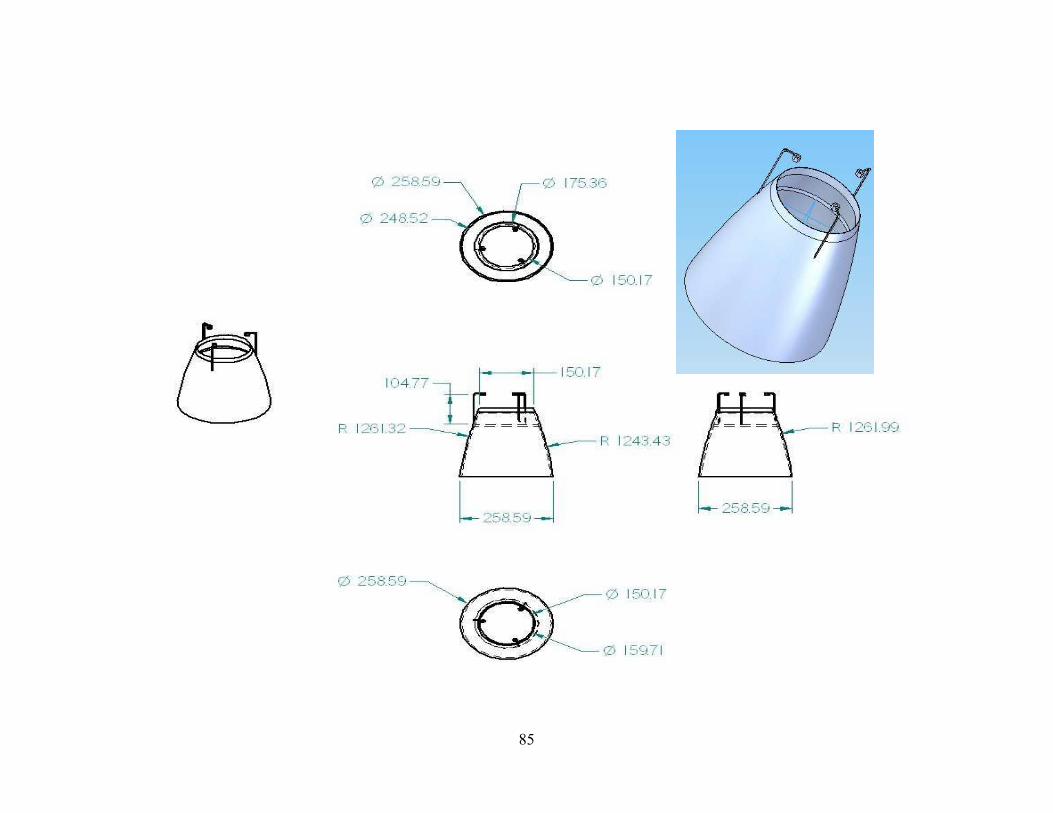
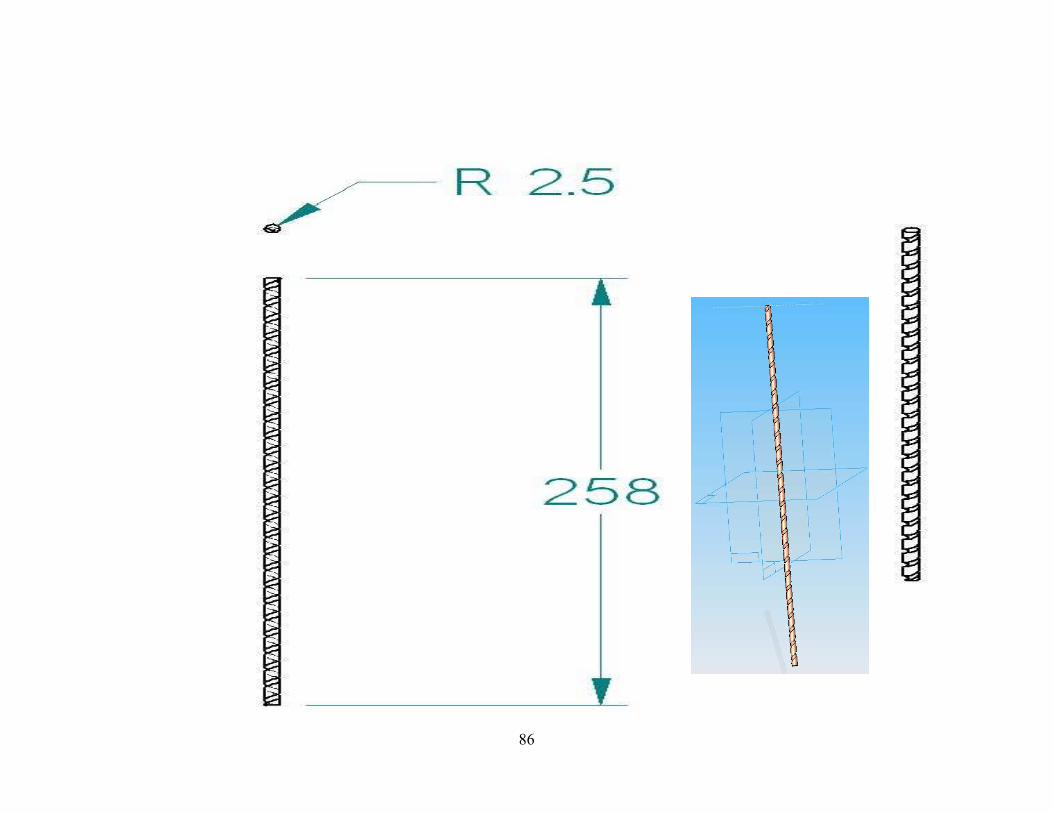
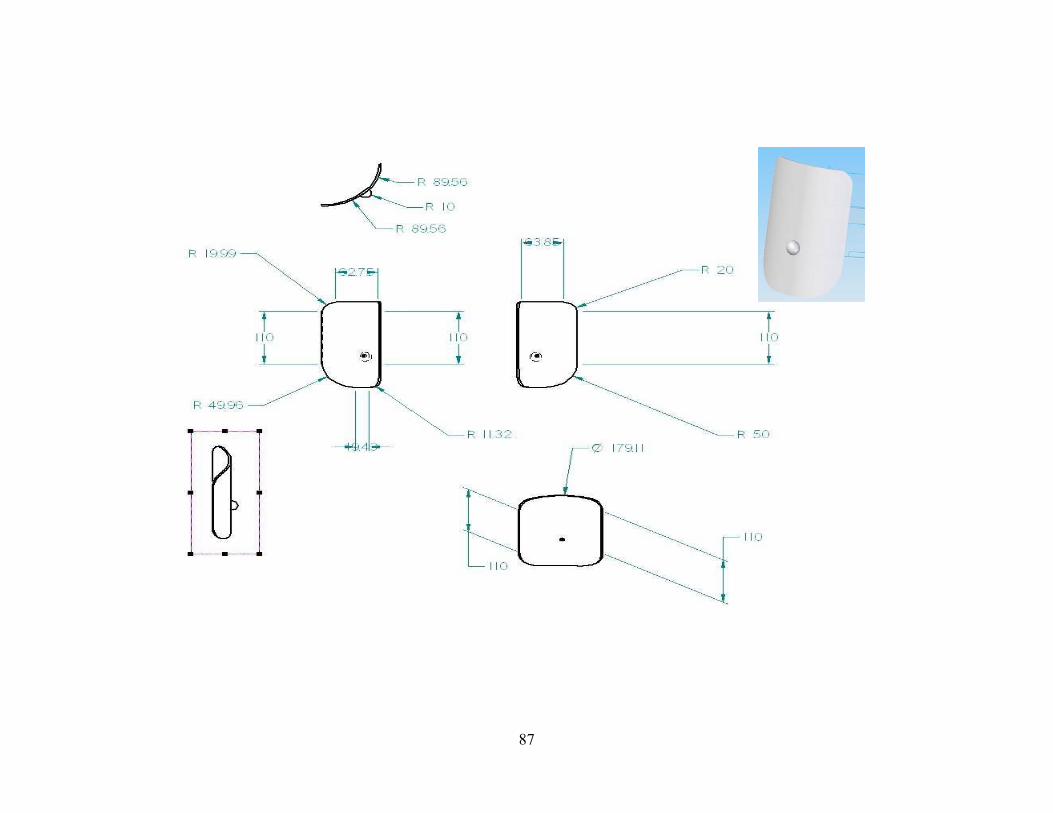
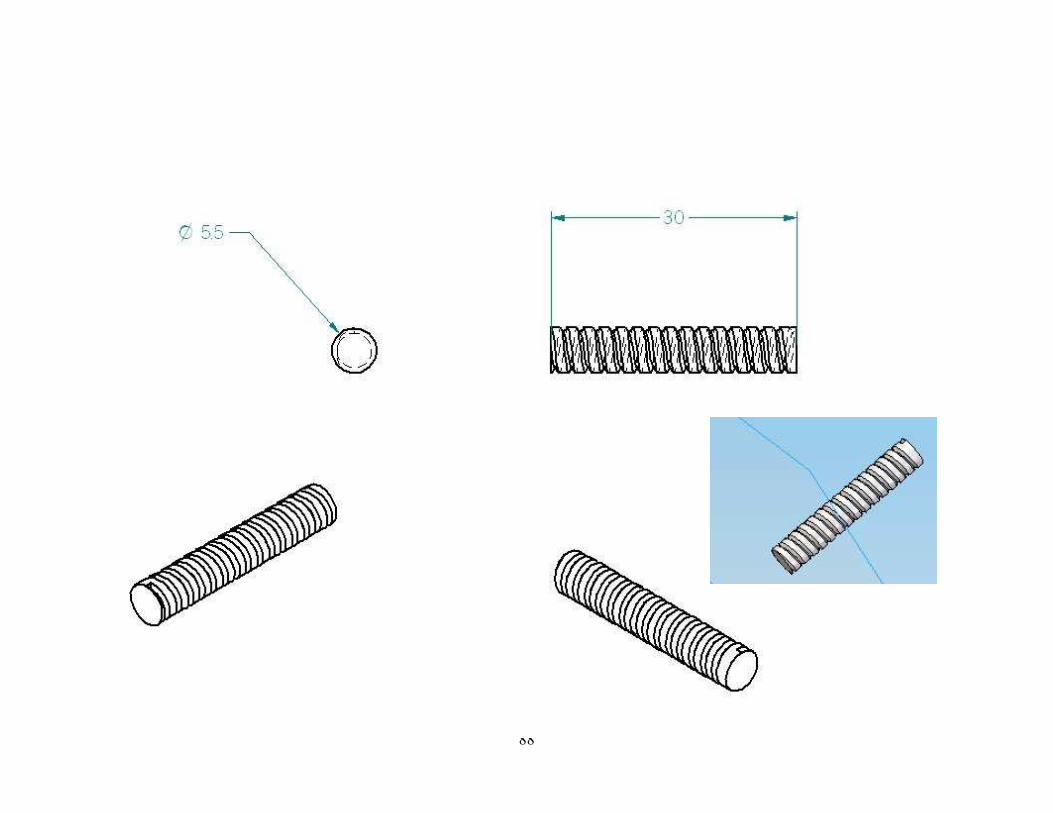
ANEXOS
Anexo A. Vistas tobera recogida y extendida
79

80
81
82
83
84
85
86
87
88





























