Embed Size (px)
Citation preview

Direction of Arrival Estimation by Moving Antenna for Multipath GNSS
Channel Characterization
Direction of Arrival Estimation by Moving Antenna for Multipath GNSS
Channel Characterization
Mohammad Hatef Keshvadi
Position, Location And Navigation (PLAN) GroupDepartment of Geomatics Engineering
University of Calgary
ENGO699.27 - March 16th, 2010
Mohammad Hatef Keshvadi
Position, Location And Navigation (PLAN) GroupDepartment of Geomatics Engineering
University of Calgary
ENGO699.27 - March 16th, 2010

Direction of Arrival Estimation by Moving Antenna for Multipath GNSS Channel CharacterizationDirection of Arrival Estimation by Moving Antenna for Multipath GNSS Channel Characterization2/13
ContentsContentsContentsContents
• ReviewReview
• Beamscan error analysisBeamscan error analysis
• Implementation of MUSIC DoA method for outdoor dataImplementation of MUSIC DoA method for outdoor data
• Indoor data collection, Upper floor, Mild multipath Indoor data collection, Upper floor, Mild multipath
environmentenvironment
• Indoor data collection, Lower floor, Mild to harsh Indoor data collection, Lower floor, Mild to harsh
multipath environmentmultipath environment
• ConclusionConclusion
• ReviewReview
• Beamscan error analysisBeamscan error analysis
• Implementation of MUSIC DoA method for outdoor dataImplementation of MUSIC DoA method for outdoor data
• Indoor data collection, Upper floor, Mild multipath Indoor data collection, Upper floor, Mild multipath
environmentenvironment
• Indoor data collection, Lower floor, Mild to harsh Indoor data collection, Lower floor, Mild to harsh
multipath environmentmultipath environment
• ConclusionConclusion

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna3/13
ReviewReviewReviewReview
Previous Tasks:Previous Tasks:• Collecting data on the Collecting data on the
roofroof• Implementation of Implementation of
BeamscanBeamscan• Elevation estimation Elevation estimation
error (deg)error (deg)(for the first revolution):(for the first revolution):
Previous Tasks:Previous Tasks:• Collecting data on the Collecting data on the
roofroof• Implementation of Implementation of
BeamscanBeamscan• Elevation estimation Elevation estimation
error (deg)error (deg)(for the first revolution):(for the first revolution):
PRN 29 PRN 24
El 79.7 67.9
PRN 29 PRN 24
El 4.3 2.6

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna4/13
Beamscan error AnalysisBeamscan error AnalysisBeamscan error AnalysisBeamscan error AnalysisAnalyzing the error in estimation of elevation angle for Analyzing the error in estimation of elevation angle for
various revolutions of the antennavarious revolutions of the antenna
(Ref. of measurement: Navigation data from Novatel’s DTU software)(Ref. of measurement: Navigation data from Novatel’s DTU software)
Analyzing the error in estimation of elevation angle for Analyzing the error in estimation of elevation angle for
various revolutions of the antennavarious revolutions of the antenna
(Ref. of measurement: Navigation data from Novatel’s DTU software)(Ref. of measurement: Navigation data from Novatel’s DTU software)
PRN 29 PRN 24
Mean 3.6 2.4
Variance 0.06 0.08
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 162
2.5
3
3.5
4
4.5
Revolution No.
Err
or
(de
g)
Beamscan Elevation Estimation Error
PRN-29
PRN-24
Probably due to time offset between the data collection time and capturing the satellite’s position time.
Search Space Steps:
0.01 rad = 0.57 deg

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna5/13
Implementation of MUSIC: outdoor dataImplementation of MUSIC: outdoor dataImplementation of MUSIC: outdoor dataImplementation of MUSIC: outdoor data
PRN 29 PRN 24
El 79.7 67.9
MUSIC:
Scanning the field of view to find spots where noise subspace is orthogonal to the signal subspace.
Higher resolution comparing to Beamscan
The same error pattern as Beamscan method
Data collection environment: CCIT rooftop (No Multipath)

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna6/13
Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)
Data collected in a typical North American, wooden frame residential structure.
This location is prone to mild to harsh multipath and fading
Data collection specifications:
Date: 5 Feb. 2010, 11:00am until 12:00pm
Revolution Speed:4 revs/min
System Architecture:
Outdoor Ref. Ant. And Indoor Rotating Ant.
Coherent Int. Time: 200msec
Radius of Rotation: 51cm
ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna7/13
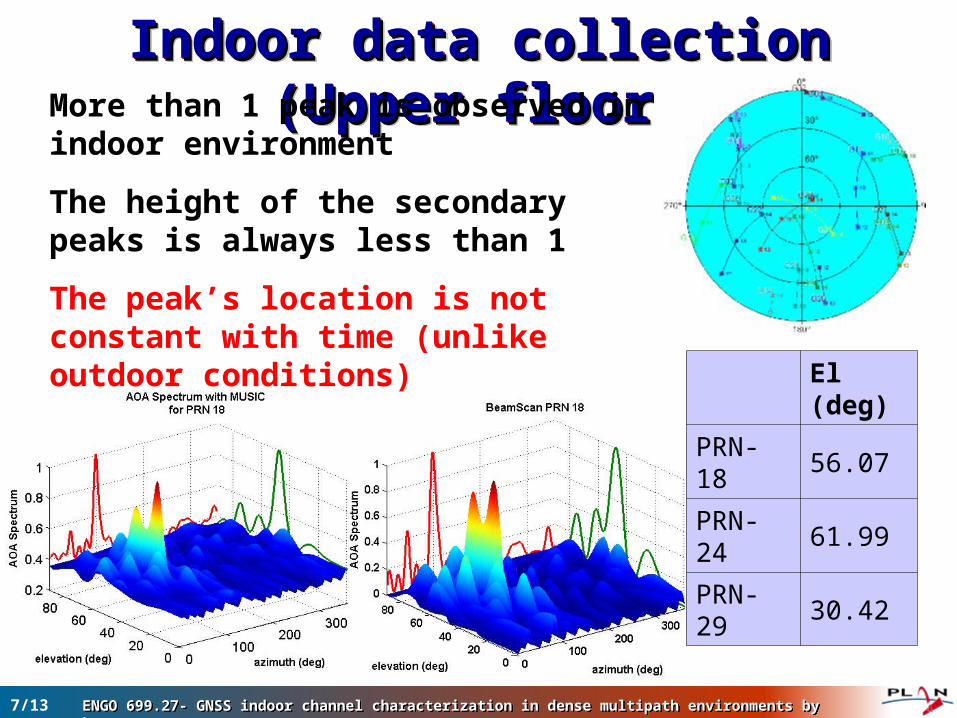
Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)
El (deg)
PRN-18 56.07
PRN-24 61.99
PRN-29 30.42
More than 1 peak is observed in indoor environment
The height of the secondary peaks is always less than 1
The peak’s location is not constant with time (unlike outdoor conditions)

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna8/13
Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)
Satellite’s actual Elevation: 62o
Variations of Signal’s source with time:

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna9/13
Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)Indoor data collection (Upper floor)Error AnalysisError AnalysisError AnalysisError Analysis
0 2 4 6 8 10 12-8
-6
-4
-2
0
2
4
Number of Revolutions
Ele
vatio
n A
ng
le E
stim
atio
n E
rro
r (d
eg
)
Error in Estimating Elevation AngleMild Multipath Environment (Upper Floor)
BeamscanMUSIC
PRN - 29
PRN - 29Beamscan MUSIC
mean 2.27 1.03
Variance 0.37 10.96
Max 3.38 3.95
Min 1.09 -6.93
Time interval between each revolution: 15s
ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna10/13
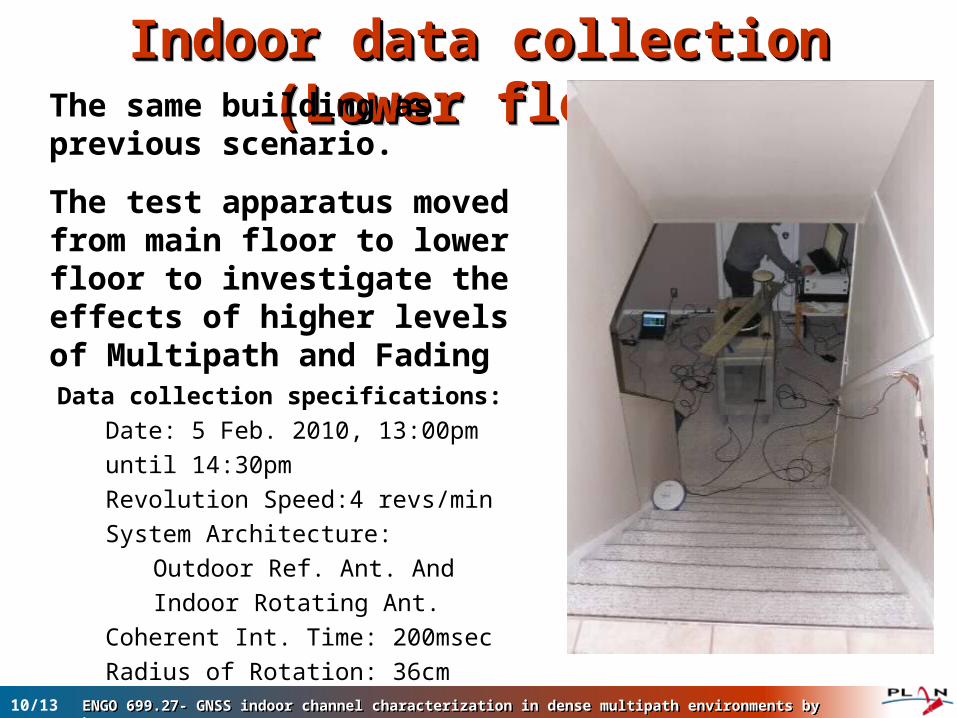
Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)The same building as previous scenario.
The test apparatus moved from main floor to lower floor to investigate the effects of higher levels of Multipath and Fading
Data collection specifications:
Date: 5 Feb. 2010, 13:00pm until
14:30pm
Revolution Speed:4 revs/min
System Architecture:
Outdoor Ref. Ant. And Indoor
Rotating Ant.
Coherent Int. Time: 200msec
Radius of Rotation: 36cm

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna11/13
Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)
El Az
PRN-18 77.01 68.82
PRN-24 20.98 119.45
The number of observed peaks increase
Peaks vary more significantly in power by time
The peak’s location has temporal variations

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna12/13
Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Error AnalysisError AnalysisError AnalysisError Analysis
1 2 3 4-15
-10
-5
0
5
10
Revolution Number
Ele
vati
on
Est
imat
ion
Err
or
(deg
)
Error in estimation of Elevation AngleMild to Harsh Multipath Environment
PRN 18 BeamscanPRN 18 MUSICPRN 24 BeamscanPRN 24 MUSIC
Beamscan
PRN18 PRN24
Mean -13.56 5.95
Variance 0.084 9.81
MUSIC
PRN18 PRN24
Mean -13.42 5.66
Variance 0.220 15.04

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna13/13
ConclusionsConclusionsConclusionsConclusions•For mild multipath environments, the error in For mild multipath environments, the error in estimation of DoA reaches to several (6~8) estimation of DoA reaches to several (6~8) degrees.degrees.By increasing the level of multipath, this error By increasing the level of multipath, this error increases while introducing more and relatively increases while introducing more and relatively stronger sources of signal.stronger sources of signal.
Future worksFuture works1- Implementing FFT based DoA methods1- Implementing FFT based DoA methods2- Implementing Beamforming methods2- Implementing Beamforming methods3- Applying the above derived algorithms on a set 3- Applying the above derived algorithms on a set of data collected in a harsh multipath of data collected in a harsh multipath environmentenvironment
•For mild multipath environments, the error in For mild multipath environments, the error in estimation of DoA reaches to several (6~8) estimation of DoA reaches to several (6~8) degrees.degrees.By increasing the level of multipath, this error By increasing the level of multipath, this error increases while introducing more and relatively increases while introducing more and relatively stronger sources of signal.stronger sources of signal.
Future worksFuture works1- Implementing FFT based DoA methods1- Implementing FFT based DoA methods2- Implementing Beamforming methods2- Implementing Beamforming methods3- Applying the above derived algorithms on a set 3- Applying the above derived algorithms on a set of data collected in a harsh multipath of data collected in a harsh multipath environmentenvironment

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna14/13
Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)
Variations of Signal’s source with time:
PRN 18 – High elevation
Satellite’s actual Elevation: 77o
APPENDIX

ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna ENGO 699.27- GNSS indoor channel characterization in dense multipath environments by moving antenna15/13
Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)Indoor data collection (Lower floor)
Variations of Signal’s source with time:
PRN 24 – Low elevation Low C/N0 and antenna pattern effects
Satellite’s actual Elevation: 21o
APPENDIX