Embed Size (px)
Citation preview

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 1/36 # Guys
1
EEL 4924 Electrical Engineering Design
(Senior Design)
Digital Strobe Tuner
Final Design Report
Team Members:
Name: David Barnette
Email: [email protected]
Name: Jamie Lin
Email: [email protected]

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 2/36 Final Design Report
2
Table of Contents
1.0 Project Abstract___________________________________________________________3
2.0 Introduction_______________________________________________________________3
2.1 Features____________________________________________________________4
2.2 Design Overview_____________________________________________________4
3.0 Floor &DisplayUnit________________________________________________________5
3.1 Floor Unit__________________________________________________________5
3.1.1 Pre-Amp Design____________________________________________5
3.1.2 Tuner Module______________________________________________6
3.1.3 Tuning Data________________________________________________7
3.2 Serial Peripheral Interface_____________________________________________7
3.2.1 Decode Data________________________________________________8
3.3 Display Unit_________________________________________________________8
3.3.1 Tuning Options_____________________________________________9
3.3.1.1 Auto Tuning__________________________________________9
3.3.1.2 Select Tuning_________________________________________9
3.3.2 User Interface______________________________________________9
3.3.2.1 Touch Screen________________________________________10
3.3.3 Display Unit Software ______________________________________10
3.3.3.1 Main_______________________________________________10
3.3.3.2 Timer A0___________________________________________10
3.3.3.3 Timer B0___________________________________________10
3.3.4 GLCD Interface___________________________________________11
3.3.5 Diagrams and Housing Units_________________________________12
4.0 Charts___________________________________________________________________18
4.1 Division of Labor ___________________________________________________18
4.2 Gantt Chart________________________________________________________18
4.3 Parts and Costs_____________________________________________________19
5.0 References_______________________________________________________________20
6.0 Source Code______________________________________________________________21
6.1 Display Unit________________________________________________________21
6.2 Floor Unit _________________________________________________________30

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 3/36 Final Design Report
3
1.0 Project Abstract
The purpose of our project is to create a digitally implemented strobe tuner for onstage use. Our
device provides an accurate and accessible tuning functionality ideal for live performances. The
device is separated into 2 modules, the onstage display unit and the floor unit. The floor unit has
a true bypass mute function in order for silent tuning. A digital signal processing unit, in the
floor unit, employs a zero crossing algorithm in order to accurately determine musical
frequencies. A 4-wire resistive LCD touch screen, on the display unit, provides a graphical user
interface easily understood by musicians. Both units communicate through a serial peripheral
interface.
2.0 Introduction
Analog strobe (stroboscopic) tuners have been around since 1936. They typically take a disk
with lines on it and spin it mechanically at a very specific frequency. The audio input is then
flashed behind the disk using a light source and any deviation from the desired pitch can be seen
by the rotating motion of the lines. When the input is at the desired pitch the lines do not move,
and as you move away from the pitch the lines move left or right depending on whether or not
you or over or under the pitch. Strobe tuners are the most accurate tuners but they are
significantly more expensive than other available tuners.
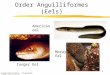
This project’s goal is to create an accurate digital strobe tuner that will be smaller, lighter, and
cheaper than analog strobe tuners. There are already electronic strobe tuners available on the
market, but ours will be unique in its functionality and shape. We will be using a stomp box
guitar pedal interface with a satellite display for tuning information. This will make our tuner
perfect for live performance settings when tuning on stage is required. The touch screen interface
will allow for the user to intuitively interact with the different functions of the tuner.
Figure 1 Design Model

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 4/36 Final Design Report
4
2.1 Features
Stroboscope Tuner
Accurate real time frequency differentiation
Simple and Informative Tuning interface
On stage hidden presence, with foot pedal muter
Satellite display allows for anywhere placement
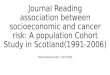
2.2 Design Overview
Figure 2 Design Overview

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 5/36 Final Design Report
5
3.0 Floor & Display Units
3.1 Floor Unit
The floor unit houses the audio processing, audio line input/output, stomp switch, and power
supply. A power supply of +5V is needed to power the floor unit and display unit however; the
power comes from a DC plug on the floor unit. As stated previously the PS-2 cable provides
power to the display unit. A +3.3V voltage regulator (LM3940) was used for low voltage
powering off of the +5V.
3.1.1 Pre-Amp Design
The single supply preamplifier design allowed for the input signal to be raised from the average
guitar/microphone output of ±100 mV to 0-+3.3V. This amplifier insures a clean crossing value
for the DSP without worry of overcharging voltages.
Figure 3 Pre-Amplifier design
Figure 4 Floor unit hardware overview

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 6/36 Final Design Report
6
3.1.2 Tuner Module
The tuner module, in the floor unit, processes all the incoming audio data. The input runs
through a preamp to increase the strength of the signal. The preamp is then connected to the
ADC on the DSP. The ADC in the chosen DSP is 12-bits so the output ranges from 0 to 4095.
During the sampling section in the software a timer interrupt runs at 30khz and records 3000
samples. As it records these samples in records ―zero‖ crossings from negative to positive. The
zero is determined after each completed sampling section by:
(1)
This offset zero is designed to be far enough away from the DC value to reduce noise around the
DC value. Also, after every zero crossing there is a debounce counter to make sure there isn’t
another zero crossing within 3 samples, which will weed out any high frequency noise (above
10khz, which does weed out some audible frequencies, but not ones frequently used for music).
The parameters recorded to determine the frequency are the number of zero crossings, the
indexes of the first and last zero crossing, and the sampling frequency and are used in:
(2)
Figure 5Tuner software diagram

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 7/36 Final Design Report
7
3.1.3 Tuning Data
This frequency is determined by the overall average of all the oscillation periods sampled. This
note is then compared to the selected tuning note or the closest musical note if in auto-tune. To
determine the variation in pitch between the calculated frequency and the desired frequency a log
scale is used to allow for a uniform representation across the musical spectrum. The unit of this
log scale is called cents and ranges from -50 to 50 around every note. The conversion is:
(3)
The human ear can only hear pitch differences with a 5 cent magnitude. With the used zero
crossing algorithms and some multiple-cycle averaging to determine pitch stability, the tuner
module can determine the pitch within an average of 1 cent accuracy. Most stock tuners have a 5
cent accuracy, but top of the line tuners claim to have a 0.1 cent accuracy. The tuner module then
waits for the display module to initiate SPI communication and sends its updated cents value.
When a new note is chosen to tune the software runs through the whole pitch detection algorithm
three times to ensure that a new note has settled and is being determined correctly, not just a
noisy reading. Also, if the range of the incoming single is not great enough, the module sends a
―No Signal‖ message to be displayed on the screen.
3.2 Serial Peripheral Interface (SPI)
The communication between the two modules is sent through a PS-2 cable. The PS-2 cable is a
6-pin Mini-DIN connector that is mostly used for connecting mice and keyboards to computers.
The 6-pins allow us to send power, ground, and four signals for SPI communication (clock,
enable, MISO, MOSI). The power is sent from the tuner module to the display module so that the
power source can be plugged in without regard for the placement of the display module. The SPI
is set up for 8 bit communication at a slow clock rate to help reduce false readings over the 5 feet
of cable.
Figure 6 SPI PS/2 cable
The display module is the master for the SPI communication. When a timer interrupt is reached
the display module initiates communication between the two modules. It sends the tuning mode
to the tuner module in the form of 0xFF for auto-tune or a corresponding index for a specific

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 8/36 Final Design Report
8
note if in select tune mode. The tuner module, which is in slave mode, responds by sending over
the cents difference and the determined note when in auto-tune mode. Because the tuner module
can only send one message at a time it must only send the note index every few cycles, so for a
short time the display module may be displaying the incorrect note but is updated as soon as the
note index is sent (usually about half a second).
3.2.1 Decode Data
In order to communicate between the devices we have developed a decode method for the 8-bit
data sent through the SPI. The table below summarizes the decode, for example for A4 the value
is determined by multiplying 12 by 4, 12*4 = 48 then adding to the base octave of A, A=0 so,
0+48 = 48. Therefore to indicate an A we must send 48 in hex over.
Note Octave 1 (base) Add multiples of 12 Octave 5
A 0 …+12 … 60
A# 1 …+12 … 61
B 2 …+12 … 62
C 3 …+12 … 63
C# 4 …+12 … 64
D 5 …+12 … 65
D# 6 …+12 … 66
E 7 …+12 … 67
F 8 …+12 … 68
F# 9 …+12 … 69
G 10 …+12 … 70
G# 11 …+12 … 71 Table 1Values are in decimal base
For cent difference decode we simply send a value between 100 and 200 in hex. A value of 150
indicates the note being played is in tune while anything below 150 is –(150-value) cents off and
above is +(value-150) cents off.
3.3 Display Unit
The active display unit provides a simple touch screen interface for the musician when tuning.
There are 2 active tuning options provided, auto tune and select tune. Both options are included
to cater to user preferences. The display unit is a graphical LCD (GLCD) which provides the
interface and custom animation to convey tuning information. Figure 7 shows the user display
projected on the display screen. The MSP430F2272 provides the necessary peripherals to operate
the touchscreen, display and SPI communication with the DSP. The MSP430 provides a fast

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 9/36 Final Design Report
9
controller that can easily handle the multiple tasks needed from the device. The MSP430 is
powered via +3.3 voltage regulator (LM3940).
Figure 7 GLCD Display
3.3.1 Tuning Options
In order to be accessible to any musician’s preferences we provided 2 methods of tuning. The
musician can simply switch from one to other by selecting it on the touch screen.
3.3.1.1 Auto Tuning
Auto tuning provides an open approach for users to tune. The musician simply has to play the
note into the floor module the closest note will be projected along with the instrument’s cent
deviation. The user therefore does not need to continually adjust the tuner when calibrating the
instrument.
3.3.1.2 Select Tuning
The select tuning allows for a much faster cent deviation acquisition. Before playing the user
must select the note using the touch screen interface and then play the note. The only difference
between this method and auto tuning is that the user must select each note before trying to tune.
3.3.2 User Interface
The user interface allows the user to select S/T for select tuning or A/T for auto tuning. The
device defaults to select tuning at A4. When in select tuning the user can choose the note, octave,
and accidentals providing a wide range of tunable notes. The LCD screen also has an adjustable
contrast and backlight allowing for adjustments for all lighting situations.

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 10/36 Final Design Report
10
3.3.2.1 Touch Screen
A 4-wire resistive touch screen provides the touch interface that the user can uses to control the
tuner. The touch screen is controlled through the MSP430F2272 analog ports A0-A3. A resistive
touch screen was chosen due to its simplicity and quick response.
3.3.3 Display Unit Software
The display unit software basically runs through a main program with 2 separate timer interrupts
that draws the animation and communicates with the floor module. The program runs through
main loop that initializes the necessary peripherals on power up and continuously controls the
touch screen and updates the interface display (for select tuning only). TimerA0 constantly
updates the strobe animation and cent difference on the screen and TimerB0 communicates with
the DSP/Floor Unit in order to receive the tuning information.
3.3.3.1 Main
The main program defaults to the select tune option which waits for a touch by the user. If no
touch is detected the timer interrupts allow for tuning acquisition while the main program waits
for a touch. When a touch is detected the program acquires the location of the touch and changes
the display appropriately. If auto tune is pressed the program goes to auto tune mode until select
tune is reselected again. Much of the GLCD software was taken from previous open source code
online and modified to suit our needs. The header file of the T6963 controller allows for simpler
LCD code.
3.3.3.2 TimerA0
TimerA0 constantly updates the strobe animation and cent deviation when in select tuning. When
in Auto Tune only the strobe animation updates. The cent deviation data determines the speed of
the animation and timer up count value. As the deviation grows smaller the animation simply
revolves slower. To project this effect the timer interrupt’s 16-bit counter is increased to a higher
value each time. Once in tune, or no cent deviation, the animation halts. The animation is a series
of 12 distinct bit maps that are drawn continuously as the tuner operates.
3.3.3.3 TimerB0
TimerB0 communicates via SPI every 0.5 seconds in order to poll updated information from the
floor unit. The local variables are updated only is the data is valid. If the data is invalid the
previous value is retained. For auto tune the value is read and printed onto the display while local
variables are changed. In select tune it only changes the local variables.

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 11/36 Final Design Report
11
Figure 8 Display Unit Software
3.3.4 GLCD Interface
The GLCD provides 20 pins for both communication and display options. There are 4 controls
pins and 8 data pins that are connected to the MSP430’s GPIOs (P1.0-1.3, P4.0-4.7). Using bit
banging, simple functions could be written in order to communicate and update the GLCD
accordingly. The advantage of a CFAG240128L provided by Crystalfontz was the fast
communication clock (12MHz). This allowed for quick graphical setups for the user interface
and animation. The GLCD screen is powered via 5V from the floor unit which powers both the
backlight and GLCD unit.
Figure 2: Hardware Diagram

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 12/36 Final Design Report
12
3.3.5 Diagrams and Housing Units
Figure 9 Display Unit Schematic
Figure 10 Display Unit PCB

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 13/36 Final Design Report
13
Figure 11 DSP Pin IN/OUT

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 14/36 Final Design Report
14
Figure 12 Floor Unit Schematic

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 15/36 Final Design Report
15
Figure 13 Floor Unit PCB
Figure 14 Display Unit

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 16/36 Final Design Report
16
Figure 15 Left Side of Display Unit
Figure 16 Floor Unit Housing
Figure 17 Floor Unit side view

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 17/36 Final Design Report
17
Figure 18 Display Unit Interior
Figure 19 Floor Unit Interio

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 18/36 Final Design Report
18
4.0 Charts
4.1 Division of Labor
Item David Jamie
Research & Design 50% 50%
Choose/Order Parts 50% 50%
Input/Preamp Design 35% 65%
ADC/Pitch Software 100% 0%
LCD/Touch Interface 0% 100%
Floor Module PCB 80% 20%
LCD Module PCB 0% 100%
SPI Interface 50% 50%
Final Construction 50% 50%
Table 2Division of Laboe
4.2 Gantt Chart
Table 3 Gantt Chart/Time Table
Research & Design - D+J
Choose/Order Parts - D+J
Design Test Boards - D+J
Check Hardware Functionality- D+J
Software Dev - D+J
Interface Modules - D+J
PCB Design/Order - D+J
Construct/Debug - D+J
Final Presentation - D+J
Project Digital Strobe Tuner Spring 2011 Schedule David (D) & Jamie (J)

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 19/36 Final Design Report
19
4.3 Parts and Cost
Part Part Number Cost
DSP TMS320F28335 $20.54
Microcontroller MSP430F2722
$1.59
Touch LCD Screen CFAG240128L-TMI-TZTS $87.08
Faceplate Custom $32.05
Capacitors Various $ 5.48
PCB Custom $33.00
Regulators LM3940 $ 1.00
LCD Housing HM211-ND $ 7.90
Tuner Housing PS-11502-G-ND $10.10
Preamp MAX9813 $ 0.57
Opamps LT1630 $ 4.32
Audio Jack ¼” $ 2.10
Condenser Mic CMA-6542PF $ 1.03
24.000MHz Crystal ECS-240-S-1 $ 0.40
IC Switch ADG444BNZ $ 2.25
Push Button Switch KS-03Q-03 $ 0.66
Total: $170.59
Table 4 Parts and Costs

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 20/36 Final Design Report
20
5.0 References
1. CFAG240128L-TMI-TZ-TS Data Sheet February 2010
http://www.crystalfontz.com/products/document/2752/CFAG240128LTMITZTS_vPreliminary_
3.1.pdf
2. LT1635 Data Sheet http://cds.linear.com/docs/Datasheet/1635fa.pdf
3. LCD.h, T6963.h Aprilc24, 2008 http://www.wpi.edu/Pubs/E-project/Available/E-project-
042108-083837/unrestricted/MQP-FAADR-Report-final.pdf
4. www.petersontuners.com/
5. http://en.wikipedia.org/wiki/Electronic_tuner
6. 4-wire and 8-wire Resistive Touch Screen controller using MSP430 Rev. A, 29 Nov
2010 http://focus.ti.com/mcu/docs/litabsmultiplefilelist.tsp?sectionId=96&tabId=1502&literature
Number=slaa384a&docCategoryId=1&familyId=342
7. MSP430F2272 Data Sheet http://focus.ti.com/lit/ds/symlink/msp430f2272.pdf
8. MSP430x2xx User Guide 2008 http://focus.ti.com/lit/ug/slau144h/slau144h.pdf
9. TMS320F28335 User Guide http://focus.ti.com/lit/ds/symlink/tms320f28335.pdf

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 21/36 Final Design Report
21
6.0 Source Code
6.1 Display Unit
TouchScreen.h
//******************************************************************************
// MSP430 8 and 4-wire resistive touchscreen application
// By: Jamie Lin
// Modified from: TI MSP430 8 and 4-wire resistive touchscreen notes code
// Febraury 2011
//
//******************************************************************************
// Pin Definitions
// Port 1
#define XNS (0x01)
#define XPS (0x02)
#define YNS (0x04)
#define YPS (0x08)
#define XND XNS
#define XPD XPS
#define XPDDIR P2DIR
#define XPDOUT P2OUT
#define YND YNS
#define YPD YPS
#define YPIIE P2IE
#define YPIIFG P2IFG
#define YPIIES P2IES
#define YPIDIR P2DIR
#define YPIIN P2IN
#define YPIOUT P2OUT
#define YPIREN P2REN
#define YPI YPS
#define YPVECTOR PORT2_VECTOR
#define CHAN_XPS INCH_1
#define CHAN_YPS INCH_3
// ADC Averaging Values
#define NUMSAMPLES 6
#define SAMPLESHIFT 2
// Global Variables
char touched; // Flag for touch status
unsigned int samples[NUMSAMPLES]; // ADC sample results
unsigned int x[2],y[2]; // X,Y touch position variables
// System Routines
void initTS(void); // Configure modules & control Registers
void waitForTouch(void); // Waits for a touch on the screen

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 22/36 Final Design Report
22
unsigned int getSamples(unsigned int); // Get samples from ADC
void readXY(unsigned char index); // Read X,Y coordinates
void setXDrive(void); // Drive X wires
void setYDrive(void); // Drive Y wires
void clearDrives(void); // Stop driving X and Y
void setTouchDrives(void); // Drive touch test wires
void delay(char); // Software delay
// Initializing Device
void initTS(void)
{
BCSCTL3 |= LFXT1S_2; // LFXT1 = VLO
// 16x S&H, MSC, ADC10ON, interrupt enabled
ADC10CTL0 = SREF0 + ADC10SHT_2 + ADC10ON + ADC10IE; // Enable ADC
//ADC10DTC1 = NUMSAMPLES; // Set number of conversions
P2OUT = 0; // Clear outputs
P2DIR = 0; // Touch screen pins input
YPIDIR &= ~(YPI); // Touch screen pins input
YPIIES = YPI; // Y+drive high to low transition int
ADC10AE0 = (XNS+XPS+YNS+YPS); // Enable analog input on all ADC pins
}
// Wait for Touch on Screen
void waitForTouch(void) {
setTouchDrives();
while((YPIIN & YPI)) { // Y+ high?
YPIIFG = 0; // Clear interrupt flags
YPIIE |= YPI; // Enable Y+ interrupt on H-L
__bis_SR_register(GIE); // Wait for interrupt
}
YPIREN &= ~YPI; // Disable pull-up resistor
clearDrives(); // Clear drive wires
}
// Get ADC Samples of Specified Channel and Average
unsigned int getXloc(unsigned int chan)
{
unsigned int avg = 0;
ADC10CTL0 &= ~ENC;
ADC10CTL0 |= ADC10ON;
P2SEL = 0x08; // Measure the x distance
ADC10CTL1 = chan;
ADC10CTL0 &= ~ADC10SC;
ADC10CTL0 &= 0x1FFF;
ADC10CTL0 |= ADC10SC + ENC;
while(ADC10CTL1 & BUSY);
// Disable conversion
avg = ADC10MEM;
ADC10CTL0 &= ~ADC10ON;
ADC10CTL0 &= ~ENC;
return avg;
}
unsigned int getYloc(unsigned int chan)
{
unsigned int avg = 0;
ADC10CTL0 &= ~ENC;
ADC10CTL0 |= ADC10ON;
P2SEL = 0x010; // Measure the x distance
ADC10CTL1 = chan;
ADC10CTL0 &= ~ADC10SC;

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 23/36 Final Design Report
23
ADC10CTL0 |= ADC10SC + ENC;
while(ADC10CTL1 & BUSY);
// Disable conversion
ADC10CTL0 &= ~ADC10ON;
ADC10CTL0 &= ~ENC;
avg = ADC10MEM;
return avg;
}
// Read X and Y Coordinates of Touch
void readXY(unsigned char index) {
// Find X Coordinate
setXDrive(); // Set X wires to drives
x[index] = getXloc(CHAN_YPS); // Sample Y+ to get X coordinate
clearDrives(); // Clear drive wires
// Find Y Coordinate
setYDrive(); // Set Y wires to drives
y[index] = getYloc(CHAN_XPS); // Sample X+ to get Y coordinate
clearDrives(); // Clear drive wires
// Setup pins to check if screen is still touched
setTouchDrives(); // See if screen still touched
if ((YPIIN&YPI)) { // Y+ high?
touched = 0; // Not touched
} else { // Y+ low
touched = 1; // Touched
}
YPIREN &= ~YPI; // Disable pull-up resistor
clearDrives(); // Clear drive wires
}
// Drive X+drive High and X-drive Low, Configure ADC Pins
void setXDrive(void) {
XPDOUT |= XPD; // X+drive = high
XPDDIR |= XPD; //
P2OUT &= ~XND; // X-drive = low
P2DIR |= XND; // X+D,X-D = outputs - P1.0
P2DIR |= YND;
P2OUT &= ~YND; // Y-drive = low - to discharge pin
P2DIR &= ~YND;
ADC10AE0 &= ~(XPS+XNS); // Enable GPIO Function
delay(1); // Delay to allow settling
}
// Drive Y+drive High and Y-drive Low, Configure ADC Pins
void setYDrive(void) {
YPIOUT |= YPI; // Y+drive = high
P2OUT &= ~YND; // Y-drive = low
P2DIR |= YND; // Y+D,Y-D = outputs
YPIDIR |= YPI;
P2DIR |= XND; // X-drive = low - to discharge pin
P2OUT &= ~XND;
P2DIR &= ~XND;
ADC10AE0 &= ~(YPS+YNS); // Enable GPIO Function
delay(1); // Delay to allow settling
}
// Stop Driving X and Y, Configure ADC Pins
void clearDrives(void) {
P2OUT &= ~(YND+XND); // Y+D,Y-D,X+D,X-D = output low
P2DIR &= ~(YND+XND); // Y+D,Y-D,X+D,X-D = inputs
XPDOUT &= ~XPD; //

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 24/36 Final Design Report
24
XPDDIR &= ~XPD;
YPIOUT &= ~(YPI);
YPIDIR &= ~(YPI);
ADC10AE0 = (YPS+YNS+XPS+XNS); // Enable analog inputs
}
// Set Y+drive to input with pull-up, X-drive to output low
void setTouchDrives(void) {
YPIDIR &= ~YPI; // Y+drive = input
YPIOUT |= YPI; // Resistor pull-up
YPIREN |= YPI; // Enable resistor
P2OUT &= ~XND; // X-drive = low
P2DIR |= XND; // X-drive = output
ADC10AE0 &= ~(YPS+XNS); // Enable GPIO Function
delay(1); // Wait for pin to settle
}
// SW Delay
void delay(char times) {
volatile unsigned int z;
while(times > 0) { // SW delay loop
for(z=0;z<0xFF;z++);
times--;
}
}
#pragma vector=ADC10_VECTOR
__interrupt void adc10(void) {
//__bic_SR_register_on_exit(GIE); // Wake up from LPM0
}
// Port Interrupt Service Routine
#pragma vector=YPVECTOR
__interrupt void port(void) {
YPIIE &= ~YPI; // Disable Y+drive interrupt
YPIIFG = 0; // Clear interrupt flags
//__bic_SR_register_on_exit(GIE); // Wake up from LPM4
}
SPI.h
void initSPI (void);
void DSP_com(char temp);
void initSPI(void)
{
P3SEL |= 0x31; // P3.0,4,5 USCI_A0 option select
P3DIR |= 0x08; // P3.3 SPI enable
//UCA0CTL0 |= UCCKPH + UCMSB + UCMST + UCSYNC + UCMODE1; // 4-pin, 8-bit SPI master,
UCA0CTL0 |= UCCKPH + UCCKPL + UCMSB + UCMST + UCSYNC; // 3-pin, 8-bit SPI master,
UCA0CTL1 |= UCSSEL_1; // running off 12 MHZ
UCA0BR0 = 0x01; //Leave CLK at 16 MHz
UCA0BR1 = 0;
UCA0MCTL = 0;
UCA0CTL1 &= ~UCSWRST;
P3OUT |= 0x08; // Set SPI high
}
unsigned int DSP_com(char temp)
{
while (!(IFG1 & UCA0TXIFG));
UCA0TXBUF = temp; // Dummy write to start SPI
IFG2 &= ~UCA0RXIFG; // Clear int flag

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 25/36 Final Design Report
25
while (!(IFG2 & UCA0RXIFG)); // RXBUF ready?
return UCA0RXBUF; // Move value
}
Main.h
/*
Digital Strobe Tuner S.C. ver 1.0
UF Senior Design 2011 Spring
MSP430F2272
By: Jamie Lin
*/
#include "msp430x22x2.h"
#include "LCD.h"
#include "TouchScreen.h"
#include "SPI.h"
unsigned int loc1=0, loc2=0, note = 1, octave = 4, temp_str = 1, snf= 2;
unsigned int auto_sel = 0, prev_val = 0;
unsigned int WRITE = 0;
unsigned int READ = 0x2D;
unsigned int prev_READ = 0;
unsigned int no_sig = 1;
LCD lcd;
int main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
DCOCTL = 0x00;
BCSCTL1 = CALBC1_12MHZ;
DCOCTL = CALDCO_12MHZ;
BCSCTL2 = SELM_0 + DIVM_0;
BCSCTL3 |= (LFXT1S_2);
TACCTL0 = CCIE;
TACTL = TASSEL_1 +MC_1 +TACLR; // Ext. INCLK, interrupt
TACCR0 = 1000;
TBCCTL0 = CCIE;
TBCTL = TBSSEL_1 +MC_1 +TBCLR; // Ext. INCLK, interrupt
TBCCR0 = 20500; //SPI transmit frequency
for(int q = 0; q<30000; q++){
for(int t = 0; t<3000; t++){
}
}
initTS();
lcd.init();
lcd.draw_graphic(16,5,autotune);
lcd.draw_graphic(16,9,seltune);
lcd.draw_graphic(23,3,up);
lcd.draw_graphic(23,11,down);
lcd.draw_graphic(20,3,up);
lcd.draw_graphic(20,11,down);
lcd.draw_graphic(26,3,up);
lcd.draw_graphic(26,11,down);
lcd.draw_graphic(16,1,sharp);
lcd.draw_graphic(16,13,flat);
lcd.draw_graphic(26,7,natural);
lcd.draw_graphic(23,7,octave_1);
lcd.draw_graphic(20,7,note_1);
lcd.draw_letter(1);
lcd.write_text(10,11,"4");

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 26/36 Final Design Report
26
lcd.write_text(20,1,"+");
lcd.write_num_text(21,1,0);
lcd.write_num_text(22,1,0);
lcd.write_text(24, 1, "cents");
initSPI();
WRITE = lcd.parse_data(1, 4, 2);
__bis_SR_register(GIE);
while(1){
waitForTouch();
touched = 1; // Screen is touched
while(touched == 1)
{
// Loop while screen is touched
readXY(0); // Get X,Y coordinates index 0
readXY(1); // Get X,Y coordinates index 1
// Take 2 values and see the difference between them.
// If value is greater than 5 steps, discard packet.
// This code is designed to take a majority vote of 2 packets.
signed int temp = x[0] - x[1]; // Diff 2 of x-coordinates
if (temp & 0x8000) // Convert 2's complement to
{ // positive value
temp = ~temp;
temp++;
}
if (temp <= 5) // Check if diff value is smaller
{ // than 5
loc1 = x[0];
loc2 = y[0];
}
}
if(auto_sel == 0){
if(loc1 < 710 && loc1 > 600){
if( loc2 > 670 && loc2 < 740){
if(note >= 7){
note=7;
}
else{
note++;
}
__disable_interrupt();
lcd.draw_letter(note);
__enable_interrupt();
}
}
if(loc1 < 350 && loc1 > 200){
if( loc2 > 640 && loc2 < 740){
if(note <= 1){
note=1;
}
else{
note--;
}
__disable_interrupt();
lcd.draw_letter(note);
__enable_interrupt();
}
}
if(loc1 > 600 && loc1 < 730){
if( loc2 < 820 && loc2 > 760){
if(octave >= 7){
octave = 7;
}
else{

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 27/36 Final Design Report
27
octave++;
}
__disable_interrupt();
lcd.draw_octave(octave);
__enable_interrupt();
}
}
if(loc1 > 220 && loc1 < 400){
if( loc2 < 840 && loc2 > 770){
if(octave <= 1){
octave=1;
}
else{
octave--;
}
__disable_interrupt();
lcd.draw_octave(octave);
__enable_interrupt();
}
}
if(loc1 > 650 && loc1 < 700){
if( loc2 < 960 && loc2 > 860){
if(snf >= 3){
snf=3;
}
else{
snf++;
}
__disable_interrupt();
lcd.draw_accidental(snf);
__enable_interrupt();
}
}
if(loc1 > 200 && loc1 < 350){
if( loc2 < 960 && loc2 > 850){
if(snf <= 1){
snf=1;
}
else{
snf--;
}
__disable_interrupt();
lcd.draw_accidental(snf);
__enable_interrupt();
}
}
WRITE = lcd.parse_data(note, octave, snf);
}
if(loc2 > 540 && loc2 < 630){
if(loc1 > 500 && loc1 < 608){
auto_sel = 1;
__disable_interrupt();
lcd.write_text(5,5," ");
lcd.draw_graphic(16,9,seltune);
lcd.draw_graphic(16,5,autotune_inv);
__enable_interrupt();
}
}
if(auto_sel == 1){
if(loc2 > 540 && loc2 < 630){
if(loc1 > 310 && loc1 < 430){
auto_sel = 0;
__disable_interrupt();
WRITE = lcd.parse_data(1, 4, 2);
lcd.draw_letter(1);

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 28/36 Final Design Report
28
lcd.draw_octave (4);
lcd.draw_accidental(2);
lcd.draw_graphic(16,5,autotune);
lcd.draw_graphic(16,9,seltune_inv);
__enable_interrupt();
P3OUT &= ~0x08; //
Enable SPI
DSP_com(WRITE);
P3OUT |= 0x08; //
Disable SPI
__delay_cycles(100);
}
}
}
loc1 = 0;
loc2 = 0;
return 0;
}
//interrupt A
#pragma vector=TIMERA0_VECTOR
__interrupt void TimerA0_interrupt (void)
{
__disable_interrupt();
if(READ != 253 && READ != 254){
if(no_sig == 1){
lcd.draw_letter(note);
lcd.draw_octave(octave);
lcd.draw_accidental(snf);
no_sig = 0;
}
if( READ == 150){
TACCR0 = 2000;
lcd.write_text(5,5," ");
lcd.write_num_text(21,1,0);
lcd.write_num_text(22,1,0);
lcd.draw_graphic(16,13,flat);
lcd.draw_graphic(16,1,sharp);
}
else if(READ < 199 && READ > 150){
lcd.write_text(5,5," ");
unsigned int h = READ;
if(READ > 175){
h = 1000;
}
else{
h = h- 150;
h = -392*h + 10408;
}
TACCR0 = h;
temp_str = lcd.strobe_cw(temp_str);
}
else if(READ < 150 && READ > 101){
lcd.write_text(5,5," ");
unsigned int h = READ;
if(READ < 125){
h = 1000;
}
else{
h = 150 - h;
h = -392*h + 10408;
}
TACCR0 = h;
temp_str = lcd.strobe_ccw(temp_str);
}
else if((READ > 185 || READ < 115) && READ > 100){
lcd.write_text(5,5," ");

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 29/36 Final Design Report
29
if(temp_str==1){
TACCR0 = 2000;
lcd.fstrobe_1();
temp_str=2;
}else{
TACCR0 = 2000;
lcd.fstrobe_2();
temp_str=1;
}
}
if(READ > 150 && READ < 200){
lcd.write_text(20,1,"+");
unsigned int k = READ - 150;
k = k/10;
lcd.write_num_text(21,1,k);
k = READ - 150;
k = k%10;
lcd.write_num_text(22,1,k);
lcd.draw_graphic(16,13,flat);
lcd.draw_graphic(16,1,sharp_inv);
}
else if (READ <150 && READ > 100){
lcd.write_text(20,1,"-");
unsigned int k = 150-READ;
k = k/10;
lcd.write_num_text(21,1,k);
k = 150-READ;
k = k%10;
lcd.write_num_text(22,1,k);
lcd.draw_graphic(16,1,sharp);
lcd.draw_graphic(16,13,flat_inv);
}
else if(READ > 200){
lcd.write_text(20,1,"+");
lcd.write_num_text(21,1,5);
lcd.write_num_text(22,1,0);
}
else if(READ < 100 && READ > 72){
lcd.write_text(20,1,"-");
lcd.write_num_text(21,1,5);
lcd.write_num_text(22,1,0);
}
}
else if( READ == 254){
lcd.write_text(5,5,"NO SIG");
lcd.clear_graphic(10,4,s_sharp);
lcd.clear_graphic(5,5,B);
lcd.clear_graphic(10,4,s_flat);
lcd.write_text(10,11," ");
no_sig = 1;
}
else if(READ == 253){
lcd.write_num_text(21,1,0);
lcd.write_num_text(22,1,0);
lcd.clear_graphic_a(1,8, arc3a1);
lcd.clear_graphic_a(1,11,arc3b1);
lcd.clear_graphic_a(5,12,arc3c1);
lcd.clear_graphic_a(8,1,arc2a1);
lcd.clear_graphic_a(11,1,arc2b1);
lcd.clear_graphic_a(12,5,arc2c1);
lcd.clear_graphic_a(12,8,arc4a1);
lcd.clear_graphic_a(11,11,arc4b1);
lcd.clear_graphic_a(8,12,arc4c1);
lcd.clear_graphic_a(5,1,arc1a1);
lcd.clear_graphic_a(1,1,arc1b1);
lcd.clear_graphic_a(1,5,arc1c1);

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 30/36 Final Design Report
30
}
__enable_interrupt();
}
#pragma vector=TIMERB0_VECTOR
__interrupt void TimerB0_interrupt (void)
{
if(auto_sel == 1){
P3OUT &= ~0x08; // Enable SPI
prev_READ = DSP_com(0xFF);
P3OUT |= 0x08; // Disable SPI
__delay_cycles(100);
if(prev_READ <73 and prev_READ != 0){
lcd.data_print(prev_READ-1);
}
if(prev_READ != 0 && prev_READ > 73){
READ = prev_READ;
}
}
else{
P3OUT &= ~0x08; // Enable SPI
__delay_cycles(100);
prev_READ = DSP_com(WRITE);
__delay_cycles(10000);
prev_READ = DSP_com(WRITE);
__delay_cycles(100);
P3OUT |= 0x08;
__delay_cycles(100);
if(prev_READ != 0){
READ = prev_READ;
}
}
}
6.2 Floor Unit
Main.h
///////////////////////////////////////////////////////////////////////
//// TUNER MODULE MAIN CODE ///////////////////////////////////////////
///////////////////////////////////////////////////////////////////////
// David Barnette
#include "F28335_example.h" // Main include file
#include "math.h"
#include "keys.h"
#include "AtoD.h"
#include "DSP28x_Project.h"
#define F_CPU 74.8
#define F_SAMPLE 30000
#define SAMPLES 3000
#define ZERO 2500
#define ZERO_R 1.2
#define BUFFER 7
#define BUFFER_ADC 5
#define DBNC 5
#define THRESHOLD 700
#define AUTOTUNE 255
#define DEBUG_NOTE 466
#define DEBUG_SWEEP 15

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 31/36 Final Design Report
31
#define DEBUG_SPEED 0.5
#define NO_SIG 254
#define UNSETTLED 253
//Freq of notes C1 -> C7
float freq[] = {32.70, 34.65, 36.71, 38.89, 41.20, 43.65, 46.25, 49.00, 51.91, 55.00,
58.27, 61.74, 65.41, 69.30, 73.42, 77.78, 82.41, 87.31, 92.50, 98.00,
103.83, 110.00, 116.54, 123.47, 130.81, 138.59, 146.83, 155.56, 164.81,
174.61,
185.00, 196.00, 207.65, 220.00, 233.08, 246.94, 261.63, 277.18, 293.66,
311.13,
329.63, 349.23, 369.99, 392.00, 415.30, 440.00, 466.16, 493.88, 523.25,
554.37,
587.33, 622.25, 659.26, 698.46, 739.99, 783.99, 830.61, 880.00, 932.33,
987.77,
1046.50, 1108.73, 1174.66, 1244.51, 1318.51, 1396.91, 1479.98, 1567.98,
1661.22,
1760.00, 1864.66, 1975.53, 2093.00};
///////////////////////////////////////////////////////////////////////////////////////
//// Variables Section ///////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////
float freq_est, f_ideal, f_diff, diff_calc, cents;
float f_buff[BUFFER];
float f_calc[BUFFER];
int update_cents, Read;
Uint16 i, j, debounce;
Uint16 note_index, update_note;
float first_zc, last_zc, zc, calc_zero;
Uint16 tune_note = AUTOTUNE, rec; // 100 for auto tune, else index for note being tuned
Uint16 ADC_samples[SAMPLES];
Uint16 max, min;
Uint16 messages[3] = {150, 0, 80}; // 0-cents, 1-note, 2-mute
Uint16 m_update[3] = {0,0,0}; // 0-no signal, 1-note, 2-mute, default if all '0'-cents
int tuner_count = 0;
float debug_freq = DEBUG_NOTE, debug_dir = DEBUG_SPEED;
//--- Global Variables
Uint16 AdcBuf[ADC_BUF_LEN]; // ADC data buffer allocation
Uint32 PwmDuty; // Measured PWM duty cycle
Uint32 PwmPeriod; // Measured PWM period
void InitMicroP() // Turn off Watchdog timer, EALLOW
{
InitSysCtrl();
EALLOW;
SysCtrlRegs.PLLCR.bit.DIV = 0; //Pll=bypass
SysCtrlRegs.PLLSTS.bit.DIVSEL = 2; //SysClkOut=OscClk/2
SysCtrlRegs.LOSPCP.all = 0;
}
void InitIO() // Initialize GPIO, PCLKCR3
{
GpioCtrlRegs.GPBMUX1.all = 0xFFFFC3C0;
GpioCtrlRegs.GPCMUX1.all = 0xFFFF0000;
GpioCtrlRegs.GPCMUX2.all = 0x0000FFFF;
SysCtrlRegs.PCLKCR3.bit.XINTFENCLK = 1;
}
void InitTimers() // Initialize timers

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 32/36 Final Design Report
32
{
GpioCtrlRegs.GPAMUX1.all = 0x00000000;
}
Uint16 SendMessage( Uint16 messages[], Uint16 m_update[] ) // SPI message
{
// Uint16 messages[3] // 0-cents, 1-note, 2-mute
// bool m_update[3] // 0-no signal, 1-note, 2-mute, default if all '0'-cents
Uint16 r_val, send;
if ( m_update[0] == 1 )
send = NO_SIG; //no signal
else if( m_update[2] == 1)
send = messages[2]; //mute message
else if( m_update[1] == 1) {
send = messages[1] + 1; //note message
m_update[1] = 0;
}
else
send = messages[0]; //cents message
SendSPI( send );
if(send == 128)
send = 0;
SpiaRegs.SPISTS.bit.OVERRUN_FLAG = 1;
r_val = SpiaRegs.SPIRXBUF & 0xFF;
if( r_val > 72 && r_val != AUTOTUNE )
r_val = 255;
else
r_val = r_val;
return r_val;
}
void main(void)
{
//--- CPU Initialization
InitSysCtrl(); // Initialize the CPU
InitPieCtrl(); // Initialize and enable the PIE
InitWatchdog(); // Initialize the Watchdog Timer
InitGpio(); // Initialize the shared GPIO pins
InitXintf(); // Initialize the external memory interface
#ifdef EXAMPLE_FLASH // EXAMPLE_FLASH, if defined, is in CCS project options
//--- Copy all Flash sections that need to run from RAM (use memcpy() from RTS library)
// Section secureRamFuncs contains user defined code that runs from CSM secured RAM
memcpy(&secureRamFuncs_runstart, &secureRamFuncs_loadstart, (Uint32)&secureRamFuncs_loadsize);
//--- Initialize the Flash and OTP
InitFlash(); // Initialize the Flash
#endif
//--- Peripheral Initialization
InitAdc(); // Initialize the ADC
InitEPwm(); // Initialize the PWM
InitECap(); // Initialize the Capture units
/////////////////////////////////////////////////////////////////////////////// ////
Intializing Section ////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////
InitMicroP();

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 33/36 Final Design Report
33
InitIO();
//InitLCD();
InitAtoD();
InitSpi();
EALLOW;
InitCpuTimers();
ConfigCpuTimer( &CpuTimer0, F_CPU, 100000.0/F_SAMPLE);
calc_zero = ZERO;
EALLOW;
GpioCtrlRegs.GPAMUX1.all = 0x00000000; //set GPIO31:0 pins to GPIO
GpioCtrlRegs.GPADIR.all = 0x000000F0; //set GPIO0 as output
i = 0;
////////////////////////////////////////////////////////////////////////////////
//// Main Section ////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////
while(1)
{
//initialize zero count variables
first_zc = 0;
last_zc = 0;
zc = 0;
debounce = 0;
max = 0;
min = 4096;
////////////////////////////////////////////////////////////////////////////////
//// Sampling Section //////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////
for( i=0 ; i<SAMPLES-1 ; i++ ){
while(CpuTimer0Regs.TCR.bit.TIF == 0);
CpuTimer0Regs.TCR.bit.TIF = 1;
ADC_samples[i] = GetAnalogInput();
if( ADC_samples[i] > max ) max = ADC_samples[i];
if( ADC_samples[i] < min ) min = ADC_samples[i];
if( i>0 && ADC_samples[i] >= calc_zero && ADC_samples[i-1] < calc_zero ){
if( first_zc == 0 ) first_zc = i;
if( debounce == 0 ){ //if it hasn't been triggered recently
zc++;
last_zc = i;
debounce = DBNC;
}
}
if( debounce != 0) debounce--;
}
freq_est = (zc-1)*F_SAMPLE/(last_zc-first_zc);
f_ideal = 0;
f_diff = F_SAMPLE/2;
if( debug_freq < DEBUG_NOTE-DEBUG_SWEEP ) debug_dir = DEBUG_SPEED;
else if( debug_freq > DEBUG_NOTE+DEBUG_SWEEP ) debug_dir = -DEBUG_SPEED;
debug_freq += debug_dir;
//////////////////////////////////////////////////////////////////////////////

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 34/36 Final Design Report
34
//// Tuning Section /////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////
//tune_note = AUTOTUNE;
//determine tuning frequency
if( tune_note == AUTOTUNE){
// calculate closest frequency
for( i=0 ; i<73 ; i++ ){
diff_calc = fabs( freq_est-freq[i] );
if( diff_calc < f_diff ){
f_diff = diff_calc;
note_index = i;
f_ideal = freq[i];
}
else
break;
}
}
else{ // if user selected
f_ideal = freq[tune_note];
note_index = tune_note;
}
calc_zero = ZERO_R*(max+min)/2;
cents = 1200 * log(freq_est/f_ideal)/log(2);
// round to nearest cent
if( cents > 0 )
cents = floor(cents);
else if (cents < 0 )
cents = -floor(fabs(cents));
// max out cents difference
if( cents > 48 )
cents = 49;
else if (cents < -48 )
cents = -49;
//check to see if the same value is being calculated
j=1;
f_calc[0] = freq_est;
f_buff[0] = f_ideal;
for(i=1; i<BUFFER; i++){
if( f_buff[0] == f_buff[i] ) j++;
}
/////////////////////////////////////////////////////////////////////////////
//// Message Section /////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////
//check for signal
if( (max-min) < THRESHOLD || freq_est < 20 || freq_est > 20000 ){
update_cents = NO_SIG - 150;
messages[0] = update_cents;
update_note = 0;
m_update[0] = 1; //send no signal message
}
// if signal has settled and needs to update
else if( j==2 && tune_note != AUTOTUNE){
update_cents = UNSETTLED;
messages[0] = update_cents;
}
else if(j>=((BUFFER/2)) && update_cents != cents){
m_update[0] = 0; // don't send no signal message
update_cents = cents;
update_note = note_index;

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 35/36 Final Design Report
35
if( messages[1] != update_note && tune_note == AUTOTUNE ){
messages[1] = update_note;
m_update[1] = 1; // send new note message
}
messages[0] = 150+update_cents;
}
if(tune_note == AUTOTUNE ){
messages[1] = update_note;
if( tuner_count == 2 ){ // send note on auto tune every 10 cycles
m_update[1] = 1;
tuner_count = 0;
}
else tuner_count++;
}
if(tune_note != AUTOTUNE ){
m_update[1] = 0;
}
for(i=BUFFER-1; i>0; i--) f_buff[i] = f_buff[i-1];
for(i=BUFFER-1; i>0; i--) f_calc[i] = f_calc[i-1];
// send 0-77 for note index
// send 80 + mute_toggle for mute info
// send 150 + cents for tuning info
// send 256 for no read
//SPI update for LCD module
//tune_note = SendMessage( messages, m_update );
rec = SendMessage( messages, m_update );
if(rec != tune_note)
tune_note = rec;
//messages[0]
GpioDataRegs.GPADAT.all = 0x00;
if(messages[0] < 110){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 1;
}
else if(messages[0] < 130){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 1;
}
else if(messages[0] < 140){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 1;
}
else if(messages[0] < 160){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 1;
}
else if(messages[0] < 170){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 0;

University of Florida EEL 4924—Spring 2011 18-Apr-11 Electrical & Computer Engineering
Page 36/36 Final Design Report
36
}
else if(messages[0] < 180){
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 0;
}
else{
GpioDataRegs.GPATOGGLE.bit.GPIO4 = 1;
GpioDataRegs.GPATOGGLE.bit.GPIO5 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO6 = 0;
GpioDataRegs.GPATOGGLE.bit.GPIO7 = 0;
}
i=0;
while( SpiaRegs.SPISTS.bit.BUFFULL_FLAG == 1 && i<10000) i++;
GpioDataRegs.GPADAT.all = 0x00;
}
} // end of main()