Embed Size (px)
Citation preview

This article was downloaded by: [Stanford University Libraries]On: 08 October 2012, At: 05:04Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Remote SensingPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tres20
Digital image processing systems and remote sensing†FUAT INCE aa Research Institute, University of Petroleum and Minerals, Dhahran, Saudi Arabia
Version of record first published: 27 Apr 2007.
To cite this article: FUAT INCE (1983): Digital image processing systems and remote sensing†, International Journal of RemoteSensing, 4:1, 129-148
To link to this article: http://dx.doi.org/10.1080/01431168308948535
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form toanyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae, and drug doses shouldbe independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims,proceedings, demand, or costs or damages whatsoever or howsoever caused arising directly or indirectly inconnection with or arising out of the use of this material.

INT. J. REMOTE SENSING, 1983, VOL. 4, No.1, 129-148
Digital image processing systems and remote sensing']
FUATINCE
Research Institute, University of Petroleum and Minerals,Dhahran, Saudi Arabia
(Received 26 JUlie /98/ .. revision received / December /981)
Abstract. Digital image processing (DIP) has been a primary reason for theemergence of remote sensing as an effective means of natural resourcesassessment. Increasing complexity and decreasing cost of digital hardware enablefast manipulation of data for maximum information extraction, which would bequite difficult if not impossible with classical photographic interpretation.
DIP is viewed in terms of a basic requirement. which is interactive (near realtime) operation, and two general characteristics, which are high volume of dataand repeated application of a sequence of computations to each element of data.Computational and operational requirements for a range of DIP functions arereviewed. These include enhancements, transforms, geometric and radiometriccorrections, encoding and classification. The implications are discussed in termsof hardware requirements. While a general purpose computer interfaced with avideo display offers the simplest DIP system, it takes the pipeline and parallelarchitectures of display processors, and to a certain extent, array processors toexecute most DIP functions in near real time, as demanded by the requirement ofinteractive processing.
Several display processors, produced commercially or in research environments, are reviewed with respect to their architecture and processing capabilities.Some trends and expected future developments are also discussed.
I. IntroductionAlong with the availability of data from Landsat satellites, developments in
digital image processing (DIP) have been the primary reason for increasingly wideruse of remote sensing in natural resources assessment. Images of earth acquired fromaircraft and satellites in the various bands of ultraviolet, visible, infrared andmicrowave frequencies are rectified, enhanced, classified and analysed by use ofcomputers and special digital equipment, for extraction of information which wouldbe very difficult or sometimes impossible to obtain by photographic or optical meansalone.
Image interpretation can be greatly facilitated due to the much more extensivefunctional capability offered by DIP. Despite higher system costs and the limitationsof the CRT output (lower resolution and smaller area coverage), the trend in remotesensing data analysis has been towards increasingly more usage of DIP techniqueswith consequent production of larger and more sophisticated DIP systems bymanufacturers (Hubble and Reader 1979).
For most effective extraction of information from images using DIP, interactiveman-machine interface is very desirable if not a necessary feature. This means nearreal-time response times of not more than a few seconds. However, achieving
[Paper presented at the USRI Open Symposium on Remote Sensing, Washington, D. C,U.S.A., in August 1981.
0143-1161/83/0401 0129 SOH)!} © I')83 Taylor & Francis LId
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

130 F. [nee
interactive operation for most DIP functions is nearly impossible on a generalpurpose computer less than a dedicated mainframe. Fortunately, the characteristicsof DIP functions are amenable to fast processing in specially constructed digitalhardware, i.e. display processors and to a lesser extent array processors, whichthrough their pipeline and parallel processing channels, can improve on theexecution speeds of most DIP functions by two orders of magnitude or more.
There are now about a dozen' display processors of varying size, sophisticationand cost in the market with a new model coming out every few months (seeManufactuers' literature in references). Several universities and research organizations have also built in-house designs (Duff 1978, Kruse et al. 1980, Parvin and Fu1980, Sawada et al. 1980, Rieger et al. 1980, Lougheed et al. 1980, Granlund 1980).
This paper will first review the characteristics and computational requirements ofcommon digital image processing functions used in remote sensing applications. Asurvey of the display processor architectures and implementations will follow, alongwith an indication of trends and future prospects.
2. Characteristics of digital image processing in remote sensing applicationsExperience has shown that in a research environment, interactive man-machine
communication is much preferable to batch processing, not only due to convenienceand flexibility, but also because long response times have a disruptive effect on thecontinuity of the vision-mind working process of the user (short-term memory),degrading overall performance, and possibly resulting in loss of information. This isalso true of digital processing in remote sensing applications.
To the image analyst user, an interactive image processing system consists of anoutput device (colour CRT image screen), input devices (keyboard, trackball, etc.)and the processing and storage units'. This situation is depicted in figure I. Theanalyst wants to type in the commands for certain functions to transfer, enhance,classify and otherwise analyse image data that he has in storage. In as manyoperations as possible, he wants to see the results on the screen in not more than afew seconds.
The volume of data and the resulting number of calculations in remote sensingpreclude the economic and effective use of general purpose computers as ~,he maincomputational unit for interactive image processing. While there is a centralcomputer performing the control and management operations, most of thecomputational work in a modern DIP system is performed in the special processing
usr. '"PUT OUTPUT I'ROCnSIHG
•STOAUE
Figure J. To the useran interactive digital image processing system consists of three principleparts: input, output and processing and storageunits.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012
Digital image processing systems and remote sensing 131
units of the display processor and to some extent the array processor. it must benoted that a modern DIP system also includes large disk space, magnetic tape drives,plotter, digitizer and film recorder/scanner, as well as other standard peripherals.
The two general characteristics of DIP are:(I) High volume of data (millions of pixels).(2) Repeated application of a sequence of several simple basic computations to
each pixel.
3. High volume of data
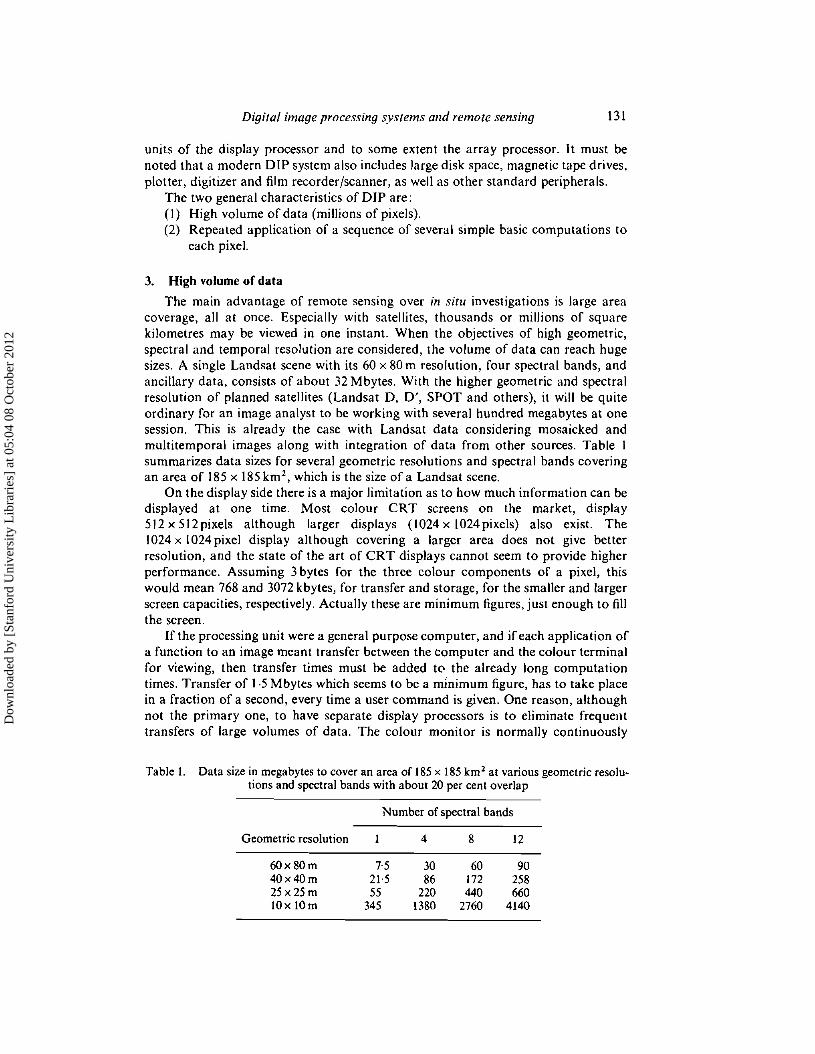
The main advantage of remote sensing over in situ investigations is large areacoverage, all at once. Especially with satellites, thousands or millions of squarekilometres may be viewed in one instant. When the objectives of high geometric,spectral and temporal resolution are considered, the volume of data can reach hugesizes. A single Landsat scene with its 60 x 80 m resolution, four spectral bands, andancillary data, consists of about 32 Mbytes. With the higher geometric and spectralresolution of planned satellites (Landsat D, D', SPOT and others), it will be quiteordinary for an image analyst to be working with several hundred megabytes at onesession. This is already the case with Landsat data considering mosaicked andmulti temporal images along with integration of data from other sources. Table Isummarizes data sizes for several geometric resolutions and spectral bands coveringan area of 185 x 185km 2
, which is the size ofa Landsat scene.On the display side there is a major limitation as to how much information can be
displayed at one time. Most colour CRT screens on the market, display512 x 51 2 pixels although larger displays (1024 x 1024pixels) also exist. The1024 x 1024pixel display although covering a larger area does not give betterresolution, and the state of the art of CRT displays cannot seem to provide higherperformance. Assuming 3 bytes for the three colour components of a pixel, thiswould mean 768 and 3072 kbytes, for transfer and storage, for the smaller and largerscreen capacities, respectively. Actually these are minimum figures, just enough to fillthe screen.
If the processing unit were a general purpose computer, and if each application ofa function to an image meant transfer between the computer and the colour terminalfor viewing, then transfer times must be added to the already long computationtimes. Transfer of 1·5Mbytes which seems to be a minimum figure, has to take placein a fraction of a second, every time a user command is given. One reason, althoughnot the primary one, to have separate display processors is to eliminate frequenttransfers of large volumes of data. The colour monitor is normally continuously
Table 1. Data sizein megabytes to cover an area of 185 x 185 km' at various geometric resolutions and spectral bands withabout 20per centoverlap
Numberof spectral bands
Geometric resolution 4 8 12
60x80m 7·5 30 60 904Ox4Om 21·5 86 172 25825x25m 55 220 440 660lOx 10m 345 1380 2760 4140
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

132 F. Ince
connected to the memory channels or processing channels so that the result of aprocess is immediately visible totally eliminating data transfer time.
4. Some common DIP functions
When DIP algorithms are studied, it is seen that with few exceptions, they can begrouped under few simple computational procedures, which lend themselvesamenable to special hardware for fast processing (Swain 1978, Lillestrand and Hoyt1974, Davis 1980). In general pipeline processing channels are suitable to apply agiven set of computational steps to each member of a large data set. Special pipelinemodules can operate in parallel for extra speed and power, which can bring downprocessing times by orders of magnitude.
For remote sensing applications, I byte is usually sufficient to store an input or anoutput value. Rarely, more than 8 bits may be required. However the interior steps inprocessing require a mixture of integer and floating point operations, of differentaccuracies.
Functional requirements of a display processor can be considered in two groups:(I) Utility functions.(2) Algorithmic computations.
Utility functions are the basic non-computation oriented functions which must beperformed for interactive operation. They involve control, transfer, conversion andgeneral handling of data. All display processors have a set of utility functionsimplemented at different levels of sophistication. Most of these are given briefly inthe following list:
(I) Transfer storage and display of image data:Read, write, clear memory channels in whole or in part.Read and modify single pixels.Switch channels for display or processing.
(2) Display mode control:Addressing (line and column) for scroll, roam, zoom split screen, etc.
(3) Display of ancillary data:Histogram, single or multichannel, original or modified.Parameters relating to current operation.Parameters relating to file information, image location, date, etc.
(4) Graphics and cursor manipulation:Enable/disable cursor(s).Cursor position control.Graphics parameters control.Methods of combination of graphics/cursor overlay.Alphanumeric or special character generation.
(5) Display processing control:Invoke processing algorithms.Read parameters and coefficients for use in algorithms from keyboard,trackball, etc.Perform data conversion and scaling.Load clear bypass LUTs.Communicate with host for transfer of software and data.Perform vector-raster conversions.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing
(6) Testing:Generation of test patterns.Diagnostics, etc.
The algorithmicJunctions can be grouped under the headings:(I) Point processing (single channel).(2) Spatial processing (single channel).(3) Arithmetical manipulations.(4) Transform domain operations.(5) Geometric corrections.(6) Classification algorithms.
133
4.1. Single channel point processingProcessing used for contrast enhancement and radiometric corrections. The input
pixel value F at point X, Yis assigned a new value G according to a given functionalrelationship <p.
G(X, Y)=<p{F(X, Y)}
It is easily accomplished by loading the desired functional relationship, into look-uptables (LUTs), that operate on-the-fly in each colour channel or memory channel ofa display processor. Probably all display processors in the market employ LUTs. Forpixel values expressed in bytes, a LUT of size 256 by 8 bits is usually sufficient. Forhigher radiometric resolutions larger LUTs would be required, as is also the casewith pseudocolour LUTs employed by some display processors which have sizes of1024 by 12bits or more.
Common single channel point processing functions are histogram equalization,density slicing and various contrast stretches. These are not necessarily timeconsuming operations but they may take up to a few minutes in a general purposecomputer, whereas display processors in general require only a fraction of a second.
Single channel point processing must often be preceded by histogramcalculations. Many advanced commercial display processors have special hardwareto calculate the histogram of a single channel 512 x 512 or larger size image, in asingle video cycle time of 1/30s (in U.S.A.) (I/25s in Europe).
4.2. Spatial processingSpatial processing is another single channel (monochrome) operation. This time
the new value of a pixel depends not only on itself but also' on its neighbouringpixels. For linear combination of pixels in a given neighbourhood, this operation isthe two-dimensional convolution expressed as:
m n
G(X, Y)= L L W;jFij(X, Y)i= 1 j= 1
where the input image pixels in the neighbourhood of F(X, Y) are multiplied by aweighting matrix W ij • In other words the image F is convolved with a user specifiedtwo-dimensional kernel W yielding output image G. A wide range of filtering is thusachieved with various sharpening (high pass), smoothing (low pass) and other effects,in addition to correlation, template matching and texture analysis uses.
The most common and simplest spatial filtering process involves the convolutionof a 512 x 512 image by a 3 x 3 kernel, which requires nine multiplications and eight
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

134 F. Ince
additions per pixel. Even for this simplest form of two-dimensional convolutionabout 2·36 x 106 multiplications and 2·10 x 106 additions are required, amounting to4-46 MOPs (mega operations). A dedicated general purpose computer with l/lsmultiplication and 0·5,IS addition time would require a minimum of 3 s for thecomputational work. Including data transfers and other overhead would increasethis time much more. On the other hand several display processors in the market canperform this operation at the video refresh rate of 1/30 s. This comes to a rate ofabout 134 MOPs/s. As the kernel size grows from 3 x 3 to 5 x 5, 7 x 7 and more, theexecution times for a serial processor like a general purpose computer, growsquadratically with the size of the kernel (i.e. 9, 25, 49), whereas in display processorseach increment in size adds a linear 1/30s (i.e. 3/30, 5/30, 7/30 s).
A popular spatial filter which is not a convolution is median filtering where themedian of a neighbourhood is the new value of the centre pixel. This operationrequires sorting of (m 2 + I)/2 values for an m x 111 kernel. For 111 = 3, 1·89 rns/pixel isrequired in one implementation using a PDP 11/45 (E. Alparslan 1981, personalcommunication). This amounts to about 500 s for a 5I2 x 512 image. Again in atleast one display processor this operation takes a few seconds.
Many algorithms based on spatial processing have been proposed and used forvarious DIP purposes. Some more common ones are laplacian, gradient anddirectional gradient. See, for example Pratt (1978), Andres (1979), Kim and Strintsiz(1980) and (Aggarwal (1979) for more details on uses and computationalimplementation.
4.3. Arithmetical manipulationsArithmetical manipulations of image by image include sums, differences,
products and ratios of two or more monochrome arrays, which may be thecomponents of a multispectral image or registered multitemporal images. An oftenused function in geological applications is ratioing, which a 5I2 x 512 colour imagerequires 786432 divisions followed by a normalization. Normalization itself wouldtake three histogram calculations and another 786432 multiplications. With thesame type of computer considered before, with I J1S integer division andmultiplication and 0·5 us addition, ratioing would take a minimum of 3-4 s, typicallymuch more for a 512 x 512 image. Again many display processors complete thisoperation in one or at most a few video cycle times of 1/30s.
Other forms of arithmetical manipulations are required with certain lineartransforms such as the principal components and canonical transforms, in which amultispectral pixel vector F of dimension n is pre-multiplied by a transformationmatrix T(1I1 x n) to yield the output pixel vector G possibly of reduced dimension m,i.e. m s;n. Linear transformation of a four-band image, such as that from Landsat, toa three-band image requires twelve multiplications and nine additions per pixel. Fora 512 x 512 image, the computation for our standard computer would take aminimum of 5 s, possibly much more considering data access and transfer times.Again for a typical advanced display processor, this operation takes a fraction of asecond.
4.4 Transform domain operationsThese operations, especially the Fourier transform are used in filtering,
correlation, template matching and texture analysis. In fact there is a direct. correspondence of operations achieved by the Fourier transform and by convolution
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 135
k=O, I, ... , N -I, i= J-I
methods, as convolving two functions in the signal domain is equivalent tomultiplying their transforms in the transform domain.
With digital processing it is more appropriate to talk about the discrete Fouriertransform (DFT) which can be defined for an N point sequencex(n)(n=O, I, ... , N -I) as:
N-l (2')X(k)= L x(n) exp - ~ nk ;.~o N
For an NxN image y(m,n)(m=O, I, ...,N-I; 11=0, I, ... ,N-I), the twodimensional DFT is defined as:
N-1N-l [2' ]Y(k, /)= m~o Jo y(m, n)exp - ~l (km+ln)
As is well known the discovery of the fast Fourier transform (FFT) in 1965(Cooley and Tukey 1965), opened up wide application areas for Fourier techniques,by reducing the required number of operations of an N point FFT to N/210g2 N/2complex multiplications and Nlog N complex additions, when N =2k is a power of 2.Prior direct calculation techniques required N 2 multiplications which became verytime consuming as N grew beyond a few thousand. Similarly for a two-dimensionalFFT of an N x N image. the number of multiplications were reduced from about N4
to 2N2 log, N.More recent developments in DFT computing have further reduced the number
of required operations (Winograd 1976, I.E.E.E. 1979). Depending on coding andthe machine, actual times for an FFT computation may show wide differences. Somerepresentative times as taken from I.E.E.E. (1979) are given in table 2.
Only the last entry gives a figure for a two-dimensional FFT. However executiontimes for an N x N two-dimensional FFT can be estimated from the one-dimensionalFFT by multiplying the time by 2N, if all data is stored in main memory (solid stateor core). Frequently though for sizes of more than 256 x 256, two-dimensional FFTwill have to use disk for data storage, which may add considerably to the overalltime. A typical figure for a PDP 11/45 computer using RK05 disks with 70 msaverage access, is 344 s for a 128 x 128 size image of which 200 s is for matrixtransposition (E. Alparslan 1981, personal communication).
FFT is a common algorithm used not only in image processing but also in a
Table 2. FIT execution times taken from I.E.E.E. (1979)
Size
One-dimensional N =256One-dimensional N =5t2One-dimensional N =1024One-dimensional N =2048One-dimensional N = 1024One-dimensional N =1024One-dimensional N = 1024One-dimensional N = 1024Two-dimensional 240x 255
Computer
Honeywell6080NHoneywell6080NHoneywell 6080 NHoneywell 6080NPDP II/55PDP II/55IBM 370/168VAX 11/780Burroughs 86700
Program, compiler. etc.
FFA-FFS, Fortran HFFA-FFS, Fortran HFFA-FFS, Fortran HFFA-FFS, Fortran HAutogen method, Fortran IV+Autogen method. AssemblerAutogen method, Fortran HAutogen method, Fortran IV+Data storage on disk
Time
29·2 ms60-9 ms
134·0ms282·0ms25(}0 ms169·0 ms32·0ms
15(}0 ms82s
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

136 F. Ince
number of other signal processing areas. Because of its wide use, some commercialarray processors are specifically marketed for their superior FFT performance. Onemachine claims 24·8s for a 512x512 two-dimensional FFT, while the followingfigures are given by another, using 167ns cycle time memory:
1024 point real FFT: 2·7ms1024 point complex FFT: 4·8 ms512 x 512 real two-dimensional FFT: 1·55s
In addition to the Fourier transform, other transforms are also used for coding,compression and filtering, including Haar, Walsh, Hadamard, Cosine and Slanttransforms. There is considerable work done on the properties and implementationcharacteristics of these and other transforms (Andrews 1979, Prall 1978, Habibi andRobinson 1974, Pratt et al. 1969, 1974, Roese et al. 1977).
4.5. Geometric correction routinesThese routines are required for image to map, and image to image registration.
They may vary from simple scale change and rotation, to non-linear warping basedon sensor platform and earth dynamics modelling. In general a geometric correctionprocess has two phases. In the first phase correction parameters are computed basedon a certain model, by using data about sensor, platform and earth dynamics, anduser supplied control points whose co-ordinates are known in terms of the otherimage or map. In the second phase, the computed correction procedure is applied tothe input image to produce the geometrically corrected or modified output image.
Designation of the ground control points is usually an interactive displayfunction. Whereas the second phase is usually not so, simple routines have beenimplemented for fast interactive use. These are linear operations which can correctscale, displacement and rotation, by transforming from old co-ordinates (X, Y) tonew co-ordinates (X', Y') through an affine transformation:
Although the implementation is fast, this operation is usually good only for smallareas. For greater precision more complex models are used which take into accountearth platform and sensor dynamics, along with statistical modelling or higherdegree polynomial corrections, or finite element approach (Wilson 1980, Bernstein1978, Simon 1975, Webber 1973).
In any case, the output image is constructed according to a resampling methodwhich may be based on nearest neighbour, bilinear or cubic convolutioninterpolations.
Precision geometric correction of large areas may be a long process whichinvolves the use of an array processor and a display processor. Other than controlpoint identification, it would be done on a batch basis both due to long times andbecause there is no requirement for interactive operation.
4.6. ClassificationClassification (or categorization) forms another major part of image processing
in remote sensing. A decision rule, based on one of several classification algorithms isused to assign each pixel to a given class.
Maximum likelihood estimation is the optimal classification algorithm in the
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 137
sense of minimizing Bayesian error and every DIP software package seems to includeit. It requires the computation of a likelihood L of each pixel vector X for each class iwith mean nJ; and covariance C;.
Lx;=(X-M)'C;-l(X-M)
This operation requires tPC(n 2 + 3n) multiplications and !PC(n 2 + 3n) additions,where P is the dimension of the pixel vector, C the number of classes, and n the sizeof a square image. The necessary vector computation and comparison for a fourdimensional 512 x 512 image with 10-12 classes, could take anywhere from severalminutes to an hour or two on a general purpose computer. Commercial displayprocessors known to the author cannot yet perform the same computation in nearreal time (few seconds) but with the help of an array processor, execution times arebrought down to the < I min range. It is claimed by an array processor manufacturerthat a maximum likelihood classification routine taking 6 min in a PDP 11/70, runsin 8·6s when their machine is incorporated into the system. Non-commercialprocessors have been built which can classify a 512 x 512 x 4 image at 0·5 s per class(Sawada 1980). There are also proposed architectures which can perform maximumlikelihood classification at near video rates.
Some commercial display processors employ classification algorithms which canbe processed at near real time rates. These use distance measurements which areeasier to compute such as minimum R 2 distance or ROO distance. Minimum R 2
distance is a restricted maximum likelihood classification scheme where it is assumedthat all classes have Gaussian distributions with equal covariances. The resultingclassification regions are hyperspheres. Minimum ROO distance is easy to implementwith monochrome LUTs because the classification regions are hypercubes. This isone form of table look-up classification, which may also have hierarchial forms.Another popular and effective classification scheme is the nearest neighbour (NN orkNN) algorithm, which can be quite involved in higher dimensions depending ondata distribution.
A major part of the classification process consists of designating the trainingareas, whereby the analyst traces out the boundaries of the areas using the trackballand the display. The actual classification may then be performed in batch or non-realtime mode.
At least one clustering algorithm is also included in most DIP software packagesfor unsupervised classification. Usually these are procedures which have someinteractive part along with some batch processing. There is considerable literature onclassification algorithms (Roche 1977, Agrawala 1977, Batchelor 1978).
4.7. Encoding oj imagesThe encoding of images is useful for data compression in the transmission and
archiving of images. However it has not been used very much in that regard, inremote sensing applications, both because the present volume of data is not yet thatdemanding, and also because there is little work or any consensus on a commonapproach by all concerned. Consequently, commercial display processors have notaddressed that aspect of image processing directly.
Actually there is substantial theoretical work done on image coding for datacompression, mostly though for military applications and TV transmission (Habibiand Robinson 1974, Andrews 1978, Poncin 1977, Musman 1979). Results have beenreported in published literature for satisfactory data compression to as low as 0·2 bit
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

138 F. Ince
per pixel (La Bonte 1977), indicating a compression ratio of 40 for byte pixels.However, there is need for research to investigate effects of image data compressionon subsequent processing in remote sensing applications. It is believed that, with thelimited channel capacities and increasing resolution and coverage of earth byplanned satellites the data volume will eventually increase to levels that will demandsome form of image compression in the not too distant future (Wintz et al. 1977,Weiss 1980).
4.8. Other image processing functionsThere are numerous other image processing functions not mentioned in any of
the categories above such as edge and line detection, thinning, image segmentation,image description, shape recognition, restoration and other pattern recognitionschemes (Fu and Rosenfeld 1976, Rosenfeld and Kak 1976, Gardner 1978, Hall1979, Gonzales and Wintz 1977, Goos and Hartmanis 1980). Although these havesome use in remote sensing applications, their use would be more important andcentral in other application areas such as robotics and medical image processing. Inaddition there are other capabilities and functions desirable in a DIP system such asintegration and overlay of data from different sources; file handling programs forsorting merging partitioning and editing; data base management; softwaremodularity, flexibility; and expansion capability.
s. The display processorAdvances in digital technology have enabled the realization of hardware that can
meet increasingly more requirements of DIP at a reasonable cost. In fact thesedevelopments constitute the chief reason for the emergence of DIP from researchlaboratories to operational environments. The trend is expected to continue towardsmore sophistication in hardware with software developments coming somewhatbehind.
There have been two general approaches to the hardware implementation ofdigital image processing. One may be called the cellular parallel machine, where eachimage cell (or pixel) forms a computational unit with connections to neighbouringcells (or pixels). The CLIP (Cellular Logic Image Processor) series of machinesprovide the perfect example for this type of architecture (Duff et al. 1973, Cordelia etal. 1977, Duff 1978). The cellular parallel architecture provides a very powerful andextremely fast means for spatial processing. In addition to convolution, complexfunctions like thinning, hole finding, edge finding can be performed in a matter ofmicroseconds or milliseconds. However the need to have a computational capabilityfor each cell requires very expensive hardware. Usually a hybrid approach is takenwhere a small processing array scans the larger image. CLIP3 had only 16 x 12processing elements (PEs) which were increased to 96 x 96 PEs in CLIP4.
A very similar machine with 64 x 64 PEs has been built by a computermanufacturer and named Distributed Array Processor (DAP). It is reported byMarks (1980) that for a 192 x 192 image a prototype version of DAP with 32 x 32PEs required only 61 ms for an edge finding algorithm which took IDs on an lCL1906A computer. Other figures given were 20·5 ms for histogram, and J·9 ms perregion for a segmentation algorithm.
Cellular parallel machines have not appeared on the commercial scene to anydegree despite the large amount of work on parallel processing machines sinceILLIAC IV, but there is increasing interest and work (Baumann 1979, Proceedings
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 139
PRIP 1979, Rosenfeld 1980, Vick et al. 1980, Siegel 1981, Siegel et al. 1979). Itshould be noted that the cellular parallel approach with its two-dimensional parallelprocessing is quite different from the parallel architectures of such machines asILLIAC IV or CRAY I in that the latter have essentially a one-dimensional vectorparallel processing.
The second approach to hardware implementation of digital image processing isthe more evolutionary way of expanding and enhancing the serial processing schemeof the standard computer, culminating in the so-called pipeline architecture. Since allthe commercially available display processors used in remote sensing can be put inthis category, the rest of this paper will deal only with the development of thepipeline architecture as seen in the present day display processors.
The bare bones of a display terminal consist of the image memory and digital tovideo conversion circuits as shown in figure 2. In this simplest form, all processing isdone in the host computer. The display terminal is only a means of seeing the imageinside the computer.
With the simple addition of a look-up table (LUT) to each channel and amicroprocessor as the overall controller, the configuration of figure 3 is obtained,which resembles the simple inexpensive commercial display processors in the market.
I II II -1 MEMORY r II CHANNEL I II 1, II 1 0 E 0 I1 I
w I ,HOST
0 IMEMORY _I MEMORY ~
,. ,~
COLOUR~ ; CONTROL ·1 CHANNEL 2
PROCESS'"GMONITOR« I
COMPUTER w I~ , ,~
,U NI T
,,I
!
~,--1 MEMO RY,, I, CHANNEL 3 ,
i,1 1, ,L .J
r----------------------------- ------------ --1~ DISPLAY TEAMINAL :
Figure 2. The minimum components of a display terminal are memory channels and videoprocessing unit.
,---------------------------------- ----,DISPLAY TERMINAL :
IIII
MEM. R··w ~tH.1 "- L U T VIOEO
w IrIlICRO·0
H os T ~PROC. I ME M. I l •• '!: COLOUR« PR DC.
COMPUTERw '.0 I CH.' I I L U T MONITOR~
~ MEMORY
ME M. I I .U r IUNIT ,
CH.' I I LU TI,I, ,
I ,I ,L -1
Figure 3. The simplest display terminals on the market have microprocessor control andlook-up tables.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

140 F. Ince
This new architecture has single point processing capability of its own, which takescare of contrast stretch enhancements. A graphic memory channel (1-4 bits/pixel) inparallel with the image memory channels, and a pseudocolor LUT following theblack and white LUTs, can be easily added for limited graphics and pseudocolourcapabilities.
It is also possible with this so-called 'microprocessor architecture' (Hubble andReader 1979), to have very limited computational processing capability using themicroprocessor. However, considering the microprocessor's memory size, and theI/O speed, this would be a very slow operation with no speed advantage over thehost computer.
This local processing capability can be enhanced by the introduction of amemory bus which can greatly speed up data transfer among the memory channels.This enables easier and faster implementation of such display functions as scroll,zoom and split screen. This new configuration is shown in figure 4 along with theadditions of graphics channel and pseudocolour LUT. The graphics channel cangenerate a graphics overlay including a grid and cursor(s). Vector and charactergenerators can also be incorporated into or in parallel with the graphics channel orthe overlay combination unit.
The architecture of figure 4 can have fairly good basic image manipulationfunctions which cover most of the utility functions listed earlier, and also most of thesingle channel point processing functions. However it is still very limited incomputational processing capability, with only a slow microprocessor and noindependent feedback loop.
Display processors with architectures similar to that of figure 4 do not usuallyemploy more than three 512 x 512 memory channels with 8 bits/pixel. Frequently lessis offered, two or three channels with 4-6 bits/pixel. In that case heavy use of thepseudocolour LUT is made for a full colour range on the display. Addressed more toother applications, these less expensive displays are not suitable for operationalinteractive remote sensing use. They could possibly be used for simple display ofimages already processed in the host computer, and for training purposes.
In order to perform many of the DIP functions beyond single point processing,high speed pipeline processing channel(s) along with a feedback loop to the memorychannels, would have to be incorporated into the display processor. Figure 5 shows aminimum configuration for this advanced level display processor. The LUTs havenot been shown separately because they would be considered as part of the pipelineprocessing channel.
The feedback loop is only implicitly shown with the two way arrow between thememory bus and the pipeline processing channel. But it is an integral and necessarypart of processing, as many applications require several passes through the pipelinechannel. Intermediate results are then fed back and stored in the available memorychannels. There are usually more than three memory channels, not only because thedisplay processor can now handle more data, but also because more memory is nowneeded for storage of intermediate and final results. There is no association of agiven channel with a given colour component of the monitor.
With the increased processing capability, two way data flow between the host andmemory channels becomes a necessity, because the display processor is now not onlya means of viewing images but also a processor, working together with the host. Infact, the display processor can be effectively used as a peripheral processor for manynon-image jobs as well.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing 'systems and remote sensing 141
r-- --- -- -- - - - - -- - -- -- -------- -- --- - -- -- --- - - ---- -- ------,, ,, ,, ,, ,, ,, ,, ,, ,: ,, ,, ,, ,, ,, ,, ,, ', ,I ,,
I,,,I
,I
:r !'- J
Figure 4. A typical low cost commercial display terminal has microprocessor control, limitedgraphics, black and white and pseudocolour LUTs.
COLQU"<
MQNITO;,II II I1 I, II ,
I ·1I I1 II rI ,
! li II II 1: IL ..J
r-- -- ------------- --------- ----------- -- ----....,I I, ,I II ,I r
I 1I ,, II II II ,I I, I,
HO ST
Figure 5. An advanced leveldisplay processor usually has a flexible pipeline processor and anumber of memory channels.
Almost all advanced display processors whether commercial or not, are avariation or an enhanced version of the basic architecture of figure 5. There isinvariably a memory bus over which image data is communicated, and a processorbus, whether explicitly called so or not, where control and program signals travel.
A very important point is the number of bits used or kept in the processing.Although the input and final output values are most often 8 bits/pixel/band, interimresults such as in division or multiplication can go up to 16 bits or more. Rangenormalization operations are frequently necessary. In order to avoid largeaccumulation of roundoff errors, internal bus widths must be more than 8 bits. Tento sixteen bits are commonly used. In addition to accuracy requirements, even largermemory bus widths are preferred for speed, where several memory channels may bein I/O with the pipeline channels simultaneously.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

142 F. [nee
In some machines the video processing unit receives its image input from thememory bus or memory channels, rather than the pipeline processors. This has theadvantage of keeping a clear picture on the monitor until the end of processing. Butit may require additional memory channels to achieve that purpose.
The main difference among the advanced display processors of today is in thenumber and nature of the pipeline processing channels. Display processors, suitablefor remote sensing use, which can be put in this category include Comtal Vision One,CLI Vicom, DeAnza 8500 and STC Model 70. One such system in the market hasthree jdcntical pipeline channels, one for each colour of the monitor. Each pipelinecan accept input from any memory channel with independent X- Y scroll, subsampleand oversample facilities to allow zoom, roam and split screen. Independent LUTsfor each memory channel followed by an adder, enables a vast degree ofcombination of arithmetical operations in one pass. Multiplication and division ofimages can be achieved by loading the LUTs with log and antilog functions. Aseparate histogram unit can generate histograms in real time. The feed-back channelhas an ALU which provides an additional processing power.
Another display processor may have from one to eight pipeline processors alongwith a unit that provides real time convolution and arithmetic options, which take1/30 s for one pass of a 512 x 512 image data base. Graphics overlay and dataoverlay from other channels in any irregular shape are achieved on-the-fly. Memorycapacity of that processor can go up to 4096 x 4096 bytes.
A recent entry into the market has two pipeline processors; one called the pointprocessor and the other, the array processor. In addition there is a parallel unitwhich handles display control functions, Again, one pass of an image through aprocessor which takes 1/30 s is enough for such basic functions as 3 x 3 convolution,contrast stretch or ratioing,
The pipeline processing channels in the present commercial display processorsretain their character as programmable, relatively general-purpose processors(within the confines of their architecture). Histogram generation seems to be the onlyfunction with dedicated hardware so far.
In a display processor produced at the research laboratory of a company and notmarketed yet (Mori et al. 1978, Sawada et al. '1980), there are separate dedicatedmodules to perform certain processing functions, which are two-dimensionalconvolution, affine transformation, region labelling, logical filtering and histogramgeneration. Naturally many algorithms require the operation of more than one ofthese modules. !tis claimed that this machine achieves maximum likelihoodclassification of a 512 x 512 image in four bands in 0·5s/class. !t is also claimed thatsmall area (much less than 512 x 512 pixels for a LANDSAT image) precisiongeometric correction is performed by the affine transformation module in about0·3 s.
In another machine under development, PICAP II, in a research environmentthis time in a university, up to 15 dedicated purpose processors, controlled by acentral computer, are connected in parallel over a high-speed bus to a primarymemory bank of 4 Mbytes (Danielsson et al. 1980, Kruse et al. 1980). The bus speedof 40 Mbytes/s permits at least four processors to be in simultaneous data transferwith the memory, which also enables simultaneous task execution. One of theprocessors is the filter processor which can perform a 512 x 512 convolution with a 7point kernel in 65 ms, which occurs in parallel with the operation of a number ofother processors.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 143
The same general idea can be seen in the architectute of lOP 3000 (Balston andCustance 1978) which was financed in part by the U.K. Department of Industry.This is a modular machine with several pipeline channels operating in any order.These include pipeline modules for ratioing, vector combination, contrast stretching,a fast classifier and statistics generator, all controlled by a control processor.
There are several other processors with parallel architecture under developmentat various laboratories (Parvin and Fu 1980, Lougheed et al. 1980, Rieger et al. 1980,Granlund 1978, 1980, Siegel et al. 1978, Siegel 1981). See also survey (Rosenfeld1980) and Proceedings PRIP (1979, 1980). However, these machines address theimage processing and pattern recognition aspects not so much of remote sensing butof other applications fields where there are more stringent requirements onprocessing speed such as in robotics and some military applications. Naturallydevelopments in these areas will also affect systems for remote sensing use.
6. Trends and prospectsThe display processors referred to in the previous section, for example, in Sawada
et al. (1980), Kruse et al. (1980) and Balston and Custance (1978), indicate the trendsfor the commercial processors in the coming years. These trends may becharacterized by larger memory, multiple, parallel, and dedicated processingchannels, multiple simultaneous users, resource sharing, distributed processing andmore independence from the central computer.
Independence from a central computer comes not only in processing ability, butalso in data storage, data management and I/O devices. In addition to magnetic tapedrives, recent display processors are coming with disk storage options with capacitiesup to several hundred megabytes. When coupled with a programmable localmicrocomputer, the need for a general purpose computer is minimized. The magnetictape serves as a data input/output device, also used to transfer data to a centralcomputer installation or to special devices for further processing or output. Thesedevices include off-line large scale plotters and film recorders.
These stand-alone display processors could be used effectively in small ormoderate scale routine operational applications. But in a research environment andlarge scale applications, connection to a general purpose computer, minicomputer orlarger, would be very desirable, however slow it may be compared to the displayprocessor. It should be noted that a DIP system must provide not only imagehandling and processing functions but also various book keeping and data basemanagement functions. Data base management becomes increasingly important asthe scale of operations grow (Bernstein 1980, Billingsley 1980). This is also true ofthe capability to integrate data from different sources, such as satellite images, aerialimages, maps and census data, into a large data base. Data management and dataintegration are now handled mostly by software but they can and will be facilitatedby some hardware features such as more intelligent device controllers, vector-rasterconversion units, and on-the-f1y data format conversion. Graphics functionsavailable should also increase from the few vector operations in today's systems to afull realtime graphics manipulation capability.
Another trend on some recent machines is to have more than one (up to four sofar) independent processing channels with monitors, in one display processor. Thiscan be considered a natural process with ever growing memory sizes andcomputational power. All users of the display processor have access to the same database stored in the memory channels, but the processing channels are independent,
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012
144 F. Ince
each with its own monitor and input devices. Allocation of the portions of thememory is dynamically assignable according to 11 priority logic. Such a displayprocessor can be used for a large job by a single user, or for smaller jobs by two ormore users.
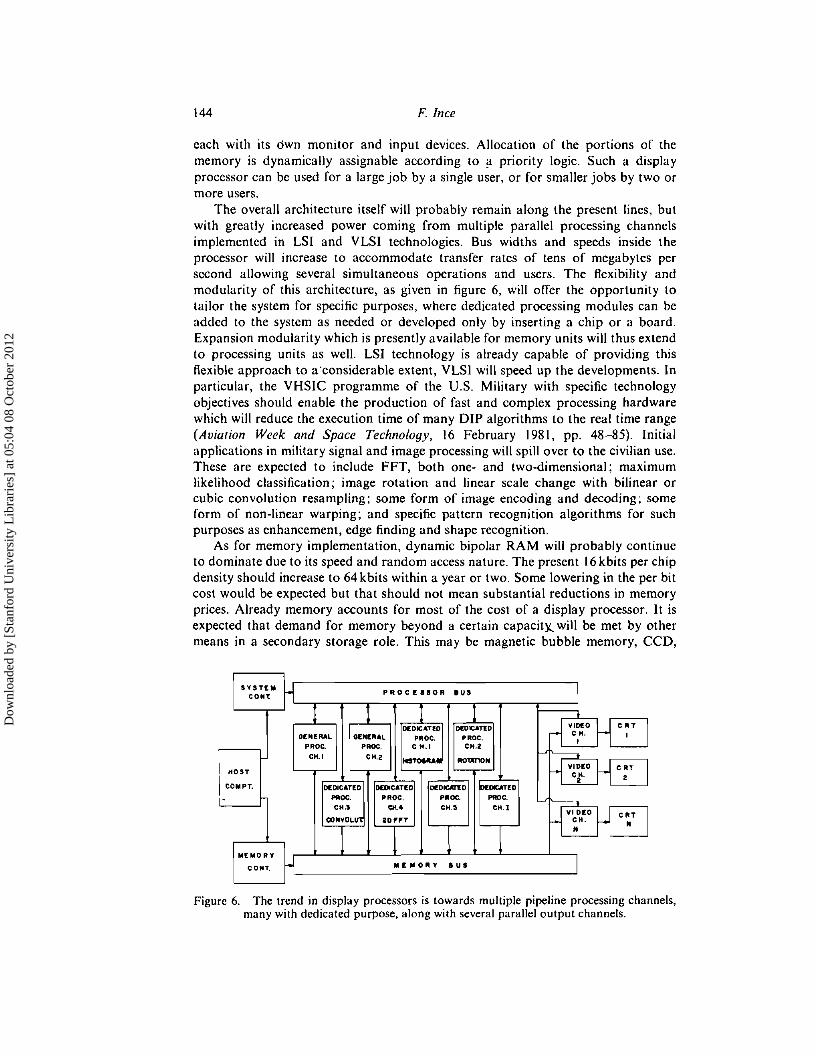
The overall architecture itself will probably remain along the present lines, butwith greatly increased power coming from multiple parallel processing channelsimplemented in LSI and VLSI technologies. Bus widths and speeds inside theprocessor will increase to accommodate transfer rates of tens of megabytes persecond allowing several simultaneous operations and users. The flexibility andmodularity of this architecture, as given in figure 6, will offer the opportunity totailor the system for specific purposes, where dedicated processing modules can beadded to the system as needed or developed only by inserting a chip or a board.Expansion modularity which is presently available for memory units will thus extendto processing units as well, LSI technology is already capable of providing thisflexible approach to aconsiderable extent, VLSI will speed up the developments. Inparticular, the VHSIC programme of the U.S. Military with specific technologyobjectives should enable the production of fast and complex processing hardwarewhich will reduce the execution time of many DIP algorithms to the real time range(Avia/ion Week and Space Technology, 16 February 1981, pp. 48-85). Initialapplications in military signal and image processing will spill over to the civilian use.These are expected to include FFT, both one- and two-dimensional; maximumlikelihood classification; image rotation and linear scale change with bilinear orcubic convolution resampling; some form of image encoding and decoding; someform of non-linear warping; and specific pattern recognition algorithms for suchpurposes as enhancement, edge finding and shape recognition.
As for memory implementation, dynamic bipolar RAM will probably continueto dominate due to its speed and random access nature. The present 16kbits per chipdensity should increase to 64 kbits within a year or two. Some lowering in the per bitcost would be expected but that should not mean substantial reductions in memoryprices. Already memory accounts for most of the cost of a display processor. It isexpected that demand for memory beyond a certain capacity will be met by othermeans in a secondary storage role. This may be magnetic bubble memory, CCD,
s v S TE"PROCESSOR IU' ICaNt
DE:DICATED DU)tCAUD rCfHeOT IOI!NERAL GENERAL PAOC. eace. C H. I
PROC. PROC. C H.I CH.2I
IeH.1 CH.2 IISTOOO•• "'"""ON ill-{ CRT
IHOST
Ct· 2I COM PT. DEDICAUD DEOlCAno ot:DICAf'l:O DlIllCoU[D
1- PRDC. PRoe. POaC. PROe.CH.' ..... eH." eH.}
~--EJCONVOL", 20'fT eH. NN
MEMORY
CONT. H Ill! .. 0" Y I U. I
Figure 6. The trend in display processors is towards multiple pipeline processing channels,many with dedicated purpose, along with several parallel output channels.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 145
electron beam addressable memory or disks, both video and digital. Primary RAMrefresh memory may go up to several tens of megabytes, depending on the number ofparallel users, beyond which secondary storage would be used. The processingchannels and CRT outputs would be connected to primary RAM memory. With fastand simultaneous transfer between primary and secondary memories, the user wouldeffectively be working with very large images, over which he can roam viewing a512 x 512 or a 1024 x 1024 pixel portion at a time.
The relatively slow and serial nature of the secondary storage devices may beovercome by parallel and modular arrangement of memory, and a wide data bus.For the case of moving head digital disks, it is reported that there is already progressmade in reconfiguring the heads and controller such that all the tracks of a cylindercan be read in parallel in one revolution (Hsiao 1980). Widening of the data bus canthen easily achieve transfer rates of up to several megabytes per second. Video disksoffer a lower cost alternative but achieving high rates with analog circuits, AID andD/A conversions may pose some problems.
Introduction of secondary storage should not decrease the performance of thedisplay processor, because the real bottleneck of the system will still be the CRToutput with its limited resolution and coverage. In order to cope with larger imagesand take advantage of larger memories, displays may have 1024 x 1024pixelcapacity, rather than the 512 x 512pixel capacity which is more prevalent now.However CRT technology is not expected to develop beyond the present stage; andno breakthrough can yet be foreseen in other means of real time image display in thenear future, despite the considerable amount of work in solid state display devices.Therefore, at least for the next few years, CRT monitors will remain as the only realtime image output device.
Finally, there is considerable work in the study of parallel architectures andparallel algorithms, in relation to each other. The point has often been made that thesoftware cannot make full use of the capacity and potential of the hardware, becauseeach is designed relatively independent of considerations for the other. This pointgains special importance with the complexities and possibilities of parallelprocessing. It is expected that the ad hoc methods and heuristics which havecharacterized the work so far, will continue to evolve yielding some powerful meansfor certain purposes in image processing and pattern recognition (Siegel et al. 1979,Siegel 1981, Vick et al. 1980, Duff 1980, Davis 1980, Kung 1980, Reeves 1980,Cordella et al. 1977, Lougheed et al. 1980, Proceedings PRIP 1979, 1980).
7. ConclusionDigital image processing provides a broad range of capabilities to process and
utilize remotely sensed data. DIP can be used to rectify and enhance the data formore effective interpretation. Moreover it offers means of information extractionwhich is very difficult or impossible by photographic or other methods. This isespecially true with the development of higher dimensional imaging instruments andintegration of data from different sources.
After reviewing most of the common DIP functions as used in remote sensing, itwas pointed out that a general purpose computer is not very suitable for DIPpurposes, primarily due to the long execution times. However specially built displayprocessors and array processors have been meeting DIP timing requirements at anincreasing level in the last few years. The development of commercial machines andby machines built in research laboratories, as reviewed here, indicate a trend for
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

146 F. Ince
more powerful processors with large shared memories; flexible architecture; modulardedicated processing units; real time execution of almost all common DIP functions,
along with many pattern recognition algorithms. The CRT image output mediumwill probably continue to be a bottleneck.
Acknowledgments
This paper was made possible by 'the generous granting of travel, time andsecretarial assistance of The Research Institute of the University of Petroleum and.
Minerals for which gratitude is expressed to the Director Dr. Abdallah E. Dabbagh,and Project Manager Dr. Mustafa Ukay!i. The author also wishes to thank Dr.Erhan Alparslan and Dr. Nezih Geckinli of Marmara Research Institute, Gebze,Turkey for valuable reviews.
References
AGGARWAL, J. K. (editor), 1977, Computer Methods in Image Analysis (Piscataway: I.E.E.E.Press).
AGRAWAlA, A. K. (editor), 1977, Machine Recognition of Pal/ems (Piscataway: I.E.E.E.Press).
AllEN, G. R., BONRUD, L. 0., COSGROVE, J. J., and STONE, R. M., 1973, The design and use ofspecial purpose processors for the machine processing of remotely sensed data.Proceedings of the Conference on Machine Processing oj Remotely Sensed Data, LARSPurdue University, West Lafayette, Indiana, October 1973.
ANDREWS, H. C. (editor), 1978, Digital Image Processing (Long Beach: I.E.E.E. ComputerSociety).
ANDREWS, H. c., and PRATT, W. K., 1968, Television bandwidth reduction by encodingspatial frequencies, J. SMPTE 77 (also in Andrews (1978».
BALSTON, D. M., and CUSTANCE, N. P. E., 1978, IDP 3000: an image analysis system for earthsurveys. In Machine Aided Image Analysis, edited by W. E. Gardner (Bristol: Instituteof Physics), pp. 287-302.
BATCHELOR, B. G., (editor), 1978, Pattern Recognition (New York: Plenum Press).BAUMANN, L. S. (editor), 1979, Proceedings: Image Understanding Workshop (Palo Alto).BERNSTEIN, R., 1978, Data base requirements for remote sensing and image processing
applications. In Data Base Techniques for Pictorial Applications, edited by G. Goos andJ. Hartmanis (Berlin: Springer-Verlag), pp. 319-346; 1980, Digital Image Processingfor Remote Sensing, (Piscataway, New Jersey: I.E.E.E. Press).
BilLINGSLEY, F. C.; 1980, Data base systems for remote sensing. In Data Base Techniques forPictorial Applications, edited by G. Goos and J. Hartmanis (Berlin: Springer-Verlag),pp. 299-318.
CASTLEMAN, K. R., 1979, Digital Image Processing (New York: Prentice Hall).CHAVEZ, P. S. Jr., O'CONNOR, J. T., McMACKEN, O. K., and ELIASON, E., 1979, Digital image
processing techniques of integrated images and non-image data sets. Proceedings of theHth International Symposium on Remote Sensing of Environment, Ann Arbor,Michigan.
COOLEY, J. W., and TUKEY, J. W., 1965, An algorithm for machine calculation of complexfourier series, Math Comput .. 19, 297.
CORDEllA, L., DUFF, M. J. B., and LEVIAlDI, S., 1977, Thresholding: a challenge for parallelprocessing. Comput. GraphicsImaqe Process.. 6, 207.
DANIELSSON, P. E., KRUSE, B., and GUDMUNDSSON, B., 1980, Memory hierarchies in PICAP II.Proceedings of Workshop on Picture Data Description and Manaqement, Asilomar,California, August 1980, I.E.E.E. Computer Society 80 CH 1530-5, pp. 275-280.
DAVIS, L. S., 1980, Computer architectures for image processing. Proceedings oj Workshop onPicture Data Description and Management, Asilomar, California, August 1980, I.E.E.E.Computer Society 80 CH 1 80 CH 1530-5, pp. 249-254.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

Digital image processing systems and remote sensing 147
DUFF, M. J. B., 1978, Parallel processing techniques. In Pal/ern Recognition, edited by B. G.Batchelor (New York: Plenum Pressj.vpp. 145-174; Future trends in cellular logicimage processing. Proceeedings of Workshop on Picture Data Description andManagement, Asilomar, California, August 1980, I.E.E.E. Computer Society 80 CH1530-5, pp. 294-297.
DUFF, M. J. B., WATSON, D. M., FOUNTAIN, T. J., and SHAW, G. K., 1973, A cellular logicarray for image processing. Pattern Recoqn, 5, 229.
Fu, K. S., and ROSeNFELD, A., 1976, Pattern recognition and image processing. I.E.E.E. Trans.Comput., 25, 1336.
GARDNeR, W. E. (editor), 1978, Machine Aided Image Analysis (Bristol: Institute of Physics).GONZALeZ, R. c., and WINTZ, P., 1977, Digital Image Processing, (London: Addison Wesley).Goos, G., and HARTMANIS, J. (editors), 1980, Data Base Techniques for Pictorial Analysis
(Berlin: Springer-Verlag).GRANLUND, G. H., 1978, In search of a general picture processing operator. Comput. Graphics
Image Process., 18, 155; 1980, GOP: a fast parallel processor for image information.In: Proceedings, EUSIPCO-80, edited by M. Kunt and F. De Coulon (Amsterdam:North Holland).
HABIBI, A., and ROBINSON, G. S., 1974, A survey of digital picture coding. I.E.E.E. Comput.,17,22 (also in Bernstein (1980)).
HALL, E. L., 1979, Computer Image Processing and Recognition (New York: Academic Press).HANSON, A. R., and RISeMAN, E. M. (editors), 1978, Computer Vision Systems (New York:
Academic Press).HSIAO, D. K., 1980, Data base computers. In Advances in Computers, Vol. 19, edited by M. C.
Yovits (New York: Academic Press), pp. 1-64.HUBBLE, L., and ReADeR, c., 1979, State of the art in image display systems. Proc. SPIE, 199,
Advances in Display Technology.I.E.E.E., 1979, Programs for Digital Signal Processing, (New York: 1.E. E.E. Press).KIM, C. E., and STRINTSIZ, M. G., 1980, High speed multidimensional convolution. I.E. E.E.
Trans. Pattern Anal. Mach. lntell., 2, 269.KRUSe, B., DANIliLSSON, P. E., and GUDMUNDSSON, B., 1980, From PICAP I to PICAP II. In
Special Computer Architectures for Pattern Processing (edited by K. S. Fu and T.Ichikawa) (CRC Press).
KUNG, H. T., 1980, The structure of parallel algorithms. In Advances in Computers, Vol. 19(Edited by M. C. Yovits) (New York: Academic Press), pp. 65-112.
LA BONTE, A. E., 1977, Two-dimensional image coding by micro adaptive picture sequencing(MAPS). Proc. Soc. Photo-optical Instrum., 119, pp.
LILLESTRAND, R. L., and HoYT, R. R., 1974, The design of advanced digital image processingsystems. Photoqrametric Engineering XL.
LOUGHeliD, R. M., MCCUBBREY, D. L., and STeRNBeRG, S. R., 1980, Cytocomputers,architectures for parallel image processing. Proceedings of Workshop on Picture DataDescription and Management, Asilomar, California, August 1980, I.E.E.E. ComputerSociety 80 CH 1530-5, pp. 281-286.
MANUFACTUReRS' LITERATURe: Literature provided by the following manufacturers constitutea large source of information for this paper (individual handbooks, manuals andpromotional material are not listed): Aydin, CSPI, Comtal, CLI, DeAnza, ESL, FPS,Genisco, Grinnell, Haseltine, lSI, Lexidata, NAC (Japan), Ramtek and STC (12 S).
MARKS, P., 1980, Lod level vision using an array processor. Comput, Graphics Image Process.,14, 281.
MORI, K., KmoDE, M., SHiNODA, H., and ASODA, H., 1978, Design of local parallel patternprocessor for image processing. Proceedings of the NCC 1978 AFlPS Conference, Proc.47.
MUSMAN, H. G., 1979, Digital coding of T.V. signals. In Advances in Diqital Imaqe Processing(Edited by P. Stucki) (New York: Plenum Press), pp. 61-75.
PARVIN, B., and Fu, K. S., 1980, A microprogrammable vector processor for image processingapplications. Proceedings of Workshop on Picture Data Description and Management,Asilomar, California, August 1980, I.E.E.E. Computer Society 80 CH 1530-5, pp.287-292.
PONCIN, J., 1977, Digital picture compression. In Digilallmage Processing and Analysis, editedby J. C. Simon and A. Rosenfeld (Leyden: Noordhoff), pp. 432-442.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012

148 Digital image processing systems and remote sensing
PRATr, W. K., 1978, Digital Image Processing (New York: Wiley).PRATT, E. K., CHEN, W. H., and WELCH, L. R., 1974, Slant transform image coding. I.E.E.E.
Trans. COmmlllJ., 22, 1075 (also in Andrews (1978)).PRAlT, W. K., KANE, J., and ANDREWS, H. C, 1969, Hadamard transform image coding.
Proc. lnst. elect. electron. Enqrs, 57, (also in Andrews (1978».PROClm/)INGS PRIP, 1979, I.E.E.£. Computer Society Conference on Pal/ern Recognition and
Imaue Processing, I.E.E.E. Publication 79 CH 1428-2CREliVES.. A. P., 1980, On efficient global information extraction methods for parallel
processors. Comput. Graphics Image Process., 14, 159.RWGER, C, BANE, J., and TRIGG, R., 1980, ZMOB: a highly parallel multiprocessor.
Proceedings of Workshop on Picture Data Description and Management, Asilomar,California, August 1980, I.E.E.E. Computer Society 80 CH 1530-5, pp. 298-304.
ROESE, J. A., PRA1T, W. K., and ROBINSON, G. S., 1977, Interframc cosine transform imagecoding. I.E.E.E. TRANS. COMMUN., 25, 1329.
ROSENFELD, A., 1979, Image processing and recognition. In Advances in Computers, Vol. 18,edited by M. C Yovits (New York: Academic Press), pp. 2-57; 1980, survey pictureprocessing 1979. Comput, Graphics Image Process., 13,46.
ROSENFELD, A., and KAK, A. C, 1976, Diqital Picture Processing (New York: AcademicPress).
SAWADA, N., NUMAGAMI, H., SH/NODA, H., KIDODE, M., and WATANABE, S., 1980, Parallelpattern processor and its application to remote sensing. Presented at 1980 Conferenceon Pattcrn Recognition, Oxford, England.
SmGEL, H. J., 1981, Using the augmented data manipulator network in PASM. Computer, 14,25.
SmGEL, H. J., SIEGEL, L. J., McMILLEN, R. J., MUELLER, P. T. Jr., and SMITH, S. D., 1979, AnSIMD/MIMD multiprocessor system for image processor and pattern recognition.Proceedings of the 1979 I.£.£.E. Computer Society Conference on Pal/ern Recognitionlind Imaqe Processing, pp. 214-224.
SIMON, L. W., 1975, Digital image reconstruction and resampling for geometric manipulation.Proceedings of the 1.£.£.£. Symposium on Machine Processinq of Remotely SensedData, pp. 3A·I-3A-Il (also in Bernstein (1978)).
STROME, W. M., and GOODENOUGH, D. G., 1978, The use of array processors in imageanalysis. In Machine Aided Image Analysis edited by W. E. Gardner (Bristol: Instituteof Physics), pp. 250-259.
SWAIN, P. H. (editor), 1978, Remote Sensing, the Quantitative Approach, (New York: McGrawHill).
TRIENDL, E. E., 1979, LANDSAT Image Processing. In Advances in Digital Image Analysis,edited by P. Stucki (New York: Plenum Press), pp. 165-175.
V/CK, CR., KARTASHEV, S. P., and KARTASHEV, S. I., 1980, Adaptable architectures forsupersystems. Computer, 13, 17,
WEBBER, W. F., 1973, Techniques for image registration. Proceedings of the I.E.E.£.Conference on Machine Processing of Remotely Sensed Data, pp. JB·I-lB-7 (also inBernstein (1978».
WEISS, H. J., 1980, Relating to the efficiency of utilization of the geostationary orbit/spectrumin the fixed satellite service. Proc. lnst, elect. electron. Enqrs, 68, 1484.
WILSON, C L., 1980, LANDSAT Derived maps of poorly mapped areas. Presented at theThird Annual International Users Conference on Computer Mapping HardwareSoftware and Data bases, Harvard University, Laboratory for Computer Graphics andSpatial Analysis.
WINOGRAD, S., 1976, On computing the discrete Fourier transform. Proc. natn. Acad. Sci.U.S.A., 73, 1005.
WINTZ, P. A., GUPTA, J. N., HWANG, K., BODENHEIMER, R. E., GONZALEZ, R. C, ROCHELLE,R. W., and WILSON, J. B., 1977, Satellite on-board processing for earth resources data.In Digital Image Processing and Analysis, edited by J. C Simon and A. Rosenfeld(Leyden: Noordhoff), pp. 269-277.
Dow
nloa
ded
by [
Stan
ford
Uni
vers
ity L
ibra
ries
] at
05:
04 0
8 O
ctob
er 2
012





























