-
8/3/2019 Digital Image Definitions&Transformations
1/18
Digital Image Definitions
A digital image described in a 2D discrete space is derived from
an analog image in a2D continuous space through a samplingprocess
that is frequently referred to as digitization. Themathematics of
that sampling process will be described in subsequent Chapters. For
now we will look atsome basic definitions associated with the
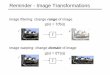
digital image. The effect of digitization is shown in figure 1.
The 2D continuous image is divided into N rows and M columns.
The intersection of a row and a
column is termed a pixel. The value assigned to the integer
coordinates with
and is . In fact, in most cases ,which wemight consider to be
the physical signal that impinges on the face of a 2D sensor , is
actually a function of
many variables including depth ,color ( )and time .Unless
otherwise stated, we will consider thecase of 2D, monochromatic,
static images in this module.
Figure(1.1): Digitization of a continuous image.
The pixel at coordinates has the integer brightness value
110.
The image shown in figure (1.1) has been divided into rows and
The value assigned toevery pixel is the average brightness in the
pixel rounded to the nearest integer value. The process
ofrepresenting the amplitude of the 2D signal at a given coordinate
as an integer value with L different graylevels is usually referred
to as amplitude quantization or simple quantization.
Common values
There are standard values for the various parameters encountered
in digital image processing. Thesevalues can be caused by video
standards, by algorithmic requirements, or by the desire to keep
digitalcircuitry simple. Table 1 gives some comm
Parameter Symbol Typical values
Rows N 256,512,525,625,1024,1035
Columns M 256,512,768,1024,1320
-
8/3/2019 Digital Image Definitions&Transformations
2/18
Gray Levels L 2,64,256,1024,4096,16384
Table 1: Common values of digital image parameters
Quite frequently we see cases ofM=N=2k where .This can be
motivated by digital circuitry
or by the use of certain algorithms such as the (fast) Fourier
transform.
The number of distinct gray levels is usually a power of 2, that
is, where B is the number of bits in
the binary representation of the brightness levels. When we
speak of a gray-level image; when
we speak of a binary image. In a binary image there are just two
gray levels which can be referredto, for example, as "black" and
"white" or "0" and "1".
Suppose that a continuous image is approximated by equally
spaced samples arranged in the
form of an array as:
(
Each element of the array refered to as "pixel" is a discrete
quantity. The array represents a digital image.
The above digitization requires a decision to be made on a value
for N a well as on the number of discretegray levels allowed for
each pixel.
It is common practice in digital image processing to let N=2n
and G = number of gray levels = . It isassumed that discrete levels
are equally spaced between 0 to L in the gray scale.
Therefore the number of bits required to store a digitized image
of size is In other
words a image with 256 gray levels (ie 8 bits/pixel) required a
storage of bytes.
The representation given by equ (1) is an approximation to a
continuous image.
Reasonable question to ask at this point is how many samples and
gray levels are required for a goodapproximation? This brings up
the question of resolution. The resolution (ie the degree of
discernbledetail) of an image is strangely dependent on both N and
m. The more these parameters are increased,
the closer the digitized array will approximate the original
image.
Unfortunately this leads to large storage and consequently
processing requirements increase rapidly as afunction of N and
large m.
Spatial and Gray level resolution:
Sampling is the principal factor determining the spatial
resolution of an image. Basically spatial resolutionis the smallest
discernible detail in an image.
-
8/3/2019 Digital Image Definitions&Transformations
3/18
As an example suppose we construct a chart with vertical lines
of width W, and with space between thelines also having width W. A
line-pair consists of one such line and its adjacent space. Thus
width of line
pair is and there are line-pairs per unit distance. A widely
used definition of resolution is simplythe smallest number of
discernible line pairs per unit distance; for es 100 line
pairs/mm.
Gray level resolution: This refers to the smallest discernible
change in gray level. The measurement ofdiscernible changes in gray
level is a highly subjective process.
We have considerable discretion regarding the number of Samples
used to generate a digital image. Butthis is not true for the
number of gray levels. Due to hardware constraints, the number of
gray levels isusually an integer power of two. The most common
value is 8 bits. It can vary depending on application.When an
actual measure of physical resolution relating pixels and level of
detail they resolve in the
original scene are not necessary, it is not uncommon to refer to
an L-level digital image of size as
having a spatial resolution of pixels and a gray level
resolution of L levels.
Characteristics of Image Operations
Types of operations
Types of neighborhoods
There is a variety of ways to classify and characterize image
operations. The reason for doing so is tounderstand what type of
results we might expect to achieve with a given type of operation
or what mightbe the computational burden associated with a given
operation.
Type of operations
The types of operations that can be applied to digital images to
transform an input image a[m, n]into an
output image b[m, n](or another representation) can be
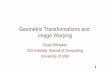
classified into three categories as shown in Table2.
Operation Characterization GenericComplexity/
Pixel
*Point -the output value at a specific coordinate isdependent
only on the input value at that samecoordinate.
constant
*Local -the output value at a specific coordinate isdependent on
the input values in the neighborhoodof that same coordinate.
*Global --the output value at a specific coordinate isdependent
on all the values in the input image..
Table 2: Types of image operations. Image size= neighborhood
size= . Note that thecomplexity is specified in operations per
pixel.
This is shown graphically in Figure(1.2).
-
8/3/2019 Digital Image Definitions&Transformations
4/18
Figure (1.2): Illustration of various types of image
operations
Types of neighborhoods
Neighborhood operations play a key role in modern digital image
processing. It is therefore important tounderstand how images can
be sampled and how that relates to the various neighborhoods that
can be
used to process an image.
Rectangular sampling - In most cases, images are sampled by
laying a rectangular grid over an image asillustrated in
Figure(1.1). This results in the type of sampling shown in
Figure(1.3ab). Hexagonalsampling-An alternative sampling scheme is
shown in Figure (1.3c) and is termed hexagonal sampling.
Both sampling schemes have been studied extensively and both
represent a possible periodic tiling of thecontinuous image space.
However rectangular sampling due to hardware and software and
softwareconsiderations remains the method of choice. Local
operations produce an output pixel value
based upon the pixel values in the neighborhood .Some of themost
common neighborhoods are the 4-connected neighborhood and the
8-connected neighborhood inthe case of rectangular sampling and the
6-connected neighborhood in the case of hexagonal sampling
illustrated in Figure(1.3).
Fig (1.3a) Fig (1.3b) Fig (1.3c)
Video Parameters
We do not propose to describe the processing of dynamically
changing images in this introduction. It isappropriate-given that
many static images are derived from video cameras and frame
grabbers-tomention the standards that are associated with the three
standard video schemes that are currently inworldwide use- NTSC,
PAL, and SECAM. This information is summarized in Table 3.
-
8/3/2019 Digital Image Definitions&Transformations
5/18
Standard NTSC PAL SECAM
Property
Images / Second 29.97 25 25
Ms / image 33.37 40.0 40.0
Lines / image 525 625 625(horiz./vert.)=aspect radio 4:3 4:3
4:3
interlace 2:1 2:1 2:1
Us / line 63.56 64.00 64.00
Table 3: Standard video parameters
In a interlaced image the odd numbered lines (1, 3, 5.) are
scanned in half of the allotted time (e.g. 20 msin PAL) and the
even numbered lines (2, 4, 6,.) are scanned in the remaining half.
The image displaymust be coordinated with this scanning format. The
reason for interlacing the scan lines of a video imageis to reduce
the perception of flicker in a displayed image. If one is planning
to use images that have beenscanned from an interlaced video
source, it is important to know if the two half-images have
been
appropriately "shuffled" by the digitization hardware or if that
should be implemented in software. Further,the analysis of moving
objects requires special care with interlaced video to avoid
'Zigzag' edges.
Tools
Certain tools are central to the processing of digital images.
These include mathematical tools such asconvolution, Fourier
analysis, and statistical descriptions, and manipulative tools such
as chain codes andrun codes. We will present these tools without
any specific motivation. The motivation will follow in
latersections.
Convolution
Properties of Convolution Fourier Transforms
Properties of Fourier Transforms
Statistics
Convolution There are several possible notations to indicate the
convolution of two (multi-dimensional) signals
to produce an output signal. The most common are:
We shall use the first form
,with the following formal definitions.
In 2D continuous space:
In 2D discrete space:
Properties of Convolution
There are a number of important mathematical properties
associated with convolution.
-
8/3/2019 Digital Image Definitions&Transformations
6/18
Convolution is commutative.
Convolution is associative.
Convolution is distributive.
where a, b, c, and dare all images, either continuous or
discrete.
2-D Discrete cosine transforms
One disadvantage of the DFT for some applications is that the
transform is complex valued, even for realdata. A related
transform, the discrete cosine transform (DCT), does not have this
problem. The DCT is aseparate transform and not the real part of
the DFT. It is widely used in image and video
compressionapplications, e.g., JPEG and MPEG. It is also possible
to use DCT for filtering using a slightly different
form of convolution called symmetric convolution.
Definition (2-D DCT)
Assume that the data array has finite rectangular support on
then the 2-D DCT isgiven as
for
(4.3.
The DCT basis functions for size 8 x 8 are shown in Figure ( ).
The mapping between the mathematicalvalues and the colors (gray
levels) is the same as in the DFT case. Each basis function
occupies a smallsquare; the squares are then arranged into as 8 x 8
mosaic. Note that unlike the DFT, where the highest
frequencies occur near , the , the highest frequencies of the
DCT occur at the highest
indices .
The inverse DCT exists and is given for as,
(4.3.2
where the weighting function w(k) is given just as in the case
of 1-D DCT by
(4.3.
-
8/3/2019 Digital Image Definitions&Transformations
7/18
From eqn (4.3.1), we see that the 2-D DCT is a separable
operator. As such it can be applied to the rowsand then the
columns, or vice versa. Thus the 2-D theory can be developed by
repeated application of the1-D theory. In the following subsections
we relate the 1-D DCT to 1-D DFT of a symmetrically
extendedsequence. This not only provides an understanding of the
DCT but also enables its fast calculation. Wealso present a fast
DCT calculation that can avoid the use of complex arithmetic in the
usual case wherex is a real-valued signal, e.g., an image. (Note:
the next two subsections can be skipped by the readerfamiliar with
the 1-D DCT)
In the 1-D case the DCT is defined as
(4.3
for every Npoint signal having support The corresponding inverse
transform, or IDCT,can be written as
(4.3
It turns out that this 1-D DCT can be understood in terms of the
DFT of a symmetrically extendedsequence,
(4.3
This is not the only way to symmetrically extendx, but this
method results in the most widely used DCT
sometimes called DCT-2 with support In fact, on defining the 2N
point DFT
we will show that the DCT can be alternatively expressed as
(4.3
Thus the DCT is just the DFT analysis of the symmetrically
extended signal defined in (4.3.6):
Looking at this equation, we see that there is no overlap in its
two components, which fit together withouta gap. We can see that
right after comes at position , which is then followed by
the rest of the nonzero part of x in reverse order, upto , where
sits .We can see a point
of symmetry midway between and N, i.e., at .
-
8/3/2019 Digital Image Definitions&Transformations
8/18
If we consider its periodic extension we will also see a
symmetry about the point . We thus
expect that the 2Npoint will be real valued except for the phase
factor . So the phase factorin eqn (4.3.7) is just what is needed
to cancel out the phase term in Y and make the DCT real , as it
mustif the two equations, (4.3.1) and (4.3.7), are to agree for
real valued inputsx.
To reconcile these two definitions, we start out with eqn
(4.3.7), and proceed as follows:
the last line following from and Euler's relation, which agrees
withthe original definition, eqn (4.3.4).
The formula for the inverse DCT, can be established similarly,
starting out from
Some 1-D DCT Properties
1) Linearity:
2) Energy conservations:
(4.3.
3) Symmetry:
(a) General case:
-
8/3/2019 Digital Image Definitions&Transformations
9/18
(b) Real-valued case:
4) Eigenvectors of unitary DCT: Define the column vector
and define the matrix C with elements:
Then the vector contains the unitary DCT, whose elements are
given as
A unitary matrix is one whose inverse is the same as the
transpose . For the unitary DCT, wehave
and energy balance equation,
which is a slight modification on the DCT Parseval relation
(4.3.8). So the unitary DCT preserves theenergy of the signal
x.
It turns out that eigenvectors of the unitary DCT are the same
as those of the symmetric tridiagonalmatrix,
-
8/3/2019 Digital Image Definitions&Transformations
10/18
and this holds true for arbitrary values of the parameter . We
can relate this matrix Q to the inverse
covariance matrix of a 1-D first-order stationary Markov random
sequence, with correlation coefficient
necessarily satisfying
where and . The actual covariance matrix of the Markov
randomsequence is
with corresponding, first-order difference equation,
It can further be shown that when , , so that eigenvectors
approximate each other too.Because the eigenvectors of a matrix and
its inverse are the same, we then have the fact that the unitaryDCT
basis vectors approximate the Karhunen-Loeve expansion, with basis
vectors given as the solutionto the matrix-vector equation,
-
8/3/2019 Digital Image Definitions&Transformations
11/18
And corresponding Karhunen-Loeve transform (KLT) given by
Thus the 1-D DCT of a first-order Markov random vector of
dimension N should be close to the KLT of x
when its correlation coefficient This ends the review of the 1-D
DCT.
Since the 2-D DCT
is just the separable operator resulting from application of the
1-D DCT along first one dimension andthen the other, the order
being immaterial, we can easily extend the 1-D DCT properties to
the 2-D case.In terms of the connection of the 2-D DCT with the
2-DFT, we thus see that we must symmetrically extendin, say, the
horizontal direction and then symmetrically extend that result in
the vertical direction. The
resulting symmetric function (extension) becomes
The symmetry is about the lines and then from (4.3.7), it
follows that the 2-D DCT is
given in terms of the point DFT as
Comments
We see that both the 1-D and 2-D DCTs involve only real
arithmetic for real-valued data, and this maybe important in some
applications.
The symmetric extension property can be expected to result in
fewer high frequency coefficients in DCTwith respect to DFT. Such
would be expected for lowpass data, since there would often be a
jump at the
four edges of the period of the corresponding periodic sequence
which is notconsistent with small high- frequency coefficients in
the DFS or DFT. Thus the DCT is attractive for lossy
data storage applications, where the exact value of the data is
not of paramount importance.
The DCT can be used for a symmetrical type of filtering with a
symmetrical filter.
2-D DCT properties are easy generalizations of 1-D DCT
properties.
-
8/3/2019 Digital Image Definitions&Transformations
12/18
Karhunen-Loeve Transform (KLT )
So far no transformation has been found for images that
completely removes statistical dependencebetween transformation
coefficients. Suppose a reversible transformation is carried out on
N-dimensional
vector to produce N-dimensional vector of transform
coefficients, denoted by,
(4.4.
where is a linear transformation matrix that is orthonormal or
unitary;
ie (4.4
(where "1" denotes transpose)
Denote the m th column of matrix by column vector , then eqn
(4.4.2 ) is equivalent to
The vectors are called orthonormal basis vectors for linear
transform .
From eqn (4.4.1) we can express as,
where are transform coefficients, and is represented as a
weighted sum of basisvectors.
KLT transform is an orthogonal linear transformation that can
remove pairwise statistical correlation
between the transform coefficients; ie the KLT transform
coefficients satisfy
where summation is over all possible values and and P( )
represents the probability.
This is usually written using the statistical averaging
operatorEas,
or
-
8/3/2019 Digital Image Definitions&Transformations
13/18
where is the variance of .
Note that statistical independence implies uncorrelation, but
the reverse is not generally true (except forjointly Gaussian r v s
)
The KLT can be derived by assuming
TheN x Ncorrelation matrix of then becomes
From the normality or unitary transform condition i.e., we get
with the
variances of along the main diagonal of the matrix. Thus, in
terms of column vectors of , the aboveequation becomes
We see that the basis vectors of the KLT are the eigenvectors of
, orthonormalised to satisfy
[Note that whereas the other image transforms like DFT, DCT were
independent of data, the KLTtransformation depends on 2nd order
satisfies of the data.]
The variances of the KLT coefficients are the eigenvalues of and
since is symmetric andpositive definite, eigenvalues are real and
positive. The KLT basic vectors and transform coefficients arealso
real. Besides decorrelating transform coefficients, the KLT has
another useful property: it maximizesthe number of transform
coefficients that are small enough so that they are insignificant.
For example,
suppose the KLT coefficients are ordered according to decreasing
variance ie
Also suppose that for reasons of economy, we transmit only the
1st pN coefficients where . The
receiver then uses the truncated column vector to form the
reconstructed values
as .
The mean squared error (MSE) between the original and the
reconstructed pels is then
-
8/3/2019 Digital Image Definitions&Transformations
14/18
It can be shown that KLT minimizes the MSE due to
truncation.
To show that of all possible linear transforms operating on
length N vectors having stationary statistics,the KTL minimizes the
MSE due to truncation.
Let be some other transform having unit length basis vectors
First we show heuristically that the truncation error is minimum
if the basis vectors areorthogonalised using the well known Gram
Schmidt procedure.
Let be the vector space spanned by the "transmitted" vectors:
for and let be
the space spanned by the remaining vectors. Therefore any vector
can be represented by
plus vector i.e, as shown in figure below.
If is the space spanned by transmitted basis vectors, then
truncation error is the length of
vector .Error is minimised if is to
If is the space spanned by transmitted basis vector, then
truncation error is the length of vector .
Error is minimized if is to .
-
8/3/2019 Digital Image Definitions&Transformations
15/18
If only is transmitted, then MSE is the squared length of the
error vector , which is clearly
minimized if is orthogonal to i.e., is orthogonal to . Further
orthogonalisation of the basis
vectors within , or within , does not affect MSE.
Thus we assume to be unitary i.e., has orthogonal basis vectors
i.e.
Its transform coefficients are then given by
The mean square truncation error is as given by eqn ( ) is,
Now suppose we represent the vectors in terms of KTL basis
vectors
i.e.,
and, This follows from
Since is unitary
(because basis vectors are of unit length)
Now from equation ( ) we have
and therefore can be written in terms of as,
Since the KTL is unitary,
-
8/3/2019 Digital Image Definitions&Transformations
16/18
We may now write
which form eqn , we get
As ,we have
ie
which is
(Since for )
Thus from eqn for
we have
The second summation
ie
and since
we have
ie
which is = MSE for KTL
This concludes that the MSE for any other linear transform
exceeds that of the KTL transform.
-
8/3/2019 Digital Image Definitions&Transformations
17/18
The Hadamard Transform
The Hadamard transform and the Haar transform, to be considered
in the next section, share a significantcomputational advantage
over the previously considered DFT, DCT, and DST transforms. Their
unitary
matrices consist of and the transforms are computed via
additions and subtractions only, with nomultiplications being
involved. Hence, for processors for which multiplication is a
time-consuming
operation a sustained saving is obtained.
The Hadamard unitary matrix of order n is the matrix , generated
by the followingiteration rule:
(4.5.
where
(4.5.
And denotes the Kronecker product of two matrices .
where A(i,j) is the (i,j) element of A,i,j=1,2...,N.. Thus,
according to (4.5.1), (4.52) it is
And for
It is not difficult to show the orthogonality of , that is,
For a vector x ofNsamples and , the transform pair is
-
8/3/2019 Digital Image Definitions&Transformations
18/18
The 2-D Hadamard tansform is given by
The Hadamard transform has good to very good energy packing
properties. Fast algorithms for its
computation in subtractions and/or additions are also
available.
Remark
Experimental results using the DCT, DST, and Hadamard transforms
for texture discriminationhave shown that the performance obtained
was close to that of the optimal KL transform. At thesame time,
this near-optimal performance is obtained at substantially reduced
complexity, due tothe availability of fast computational schemes as
reported before.