Embed Size (px)
Citation preview
DIGITAL HEARING AIDS
16 April 2009
James M. Kates
Research Fellow, GN ReSound A/S
AdjointFaculty, CU Boulder
jkates@
gnresound.dk
2
Contents
•Hearing and hearing loss
•Hearing aid types and processing constraints
•Dynamic-range compression
•Noise suppression
•Feedback cancellation
•Microphones and arrays
•List of additional areas
•Conclusions
Hearing and
Hearing Loss
4
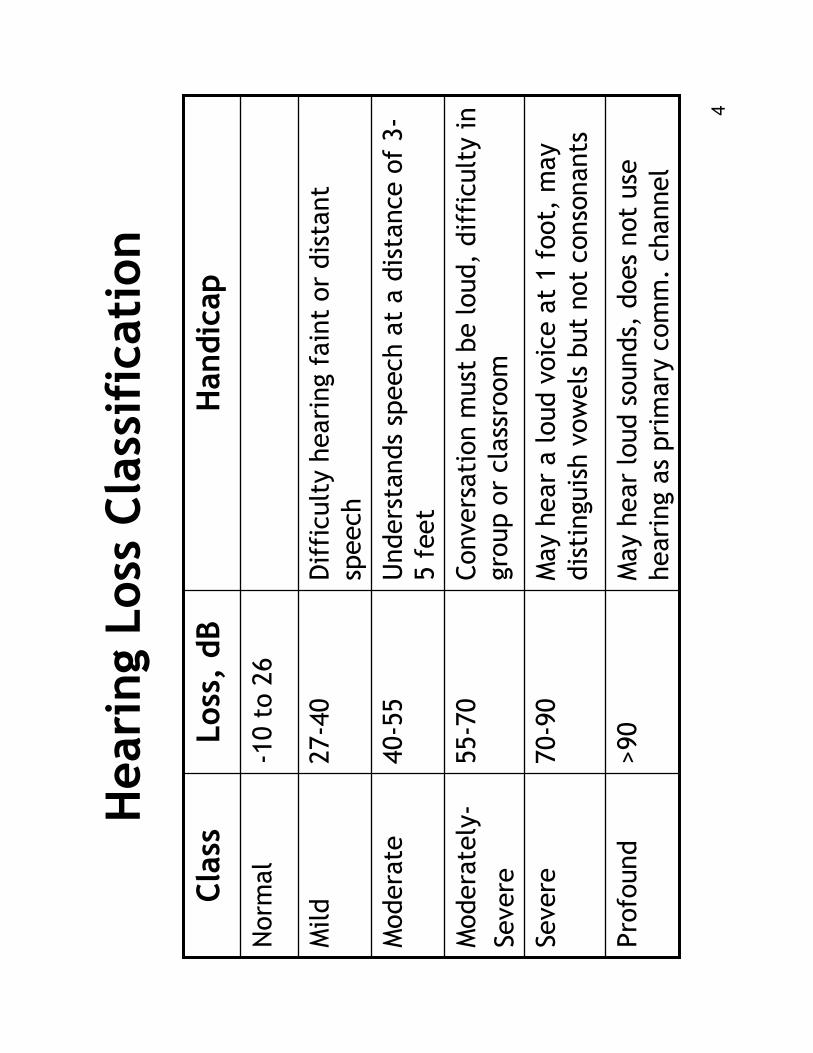
Hearing Loss Classification
May hear loud sounds, does not use
hearing as primary comm. channel
>90
Profound
May hear a loud voice at 1 foot, may
distinguish vowels but not consonants
70-90
Severe
Conversation must be loud, difficulty in
group or classroom
55-70
Moderately-
Severe
Understands speech at a distance of 3-
5 feet
40-55
Moderate
Difficulty hearing faint or distant
speech
27-40
Mild
-10 to 26
Norm
al
Handicap
Loss, dB
Class
5
6
7
8
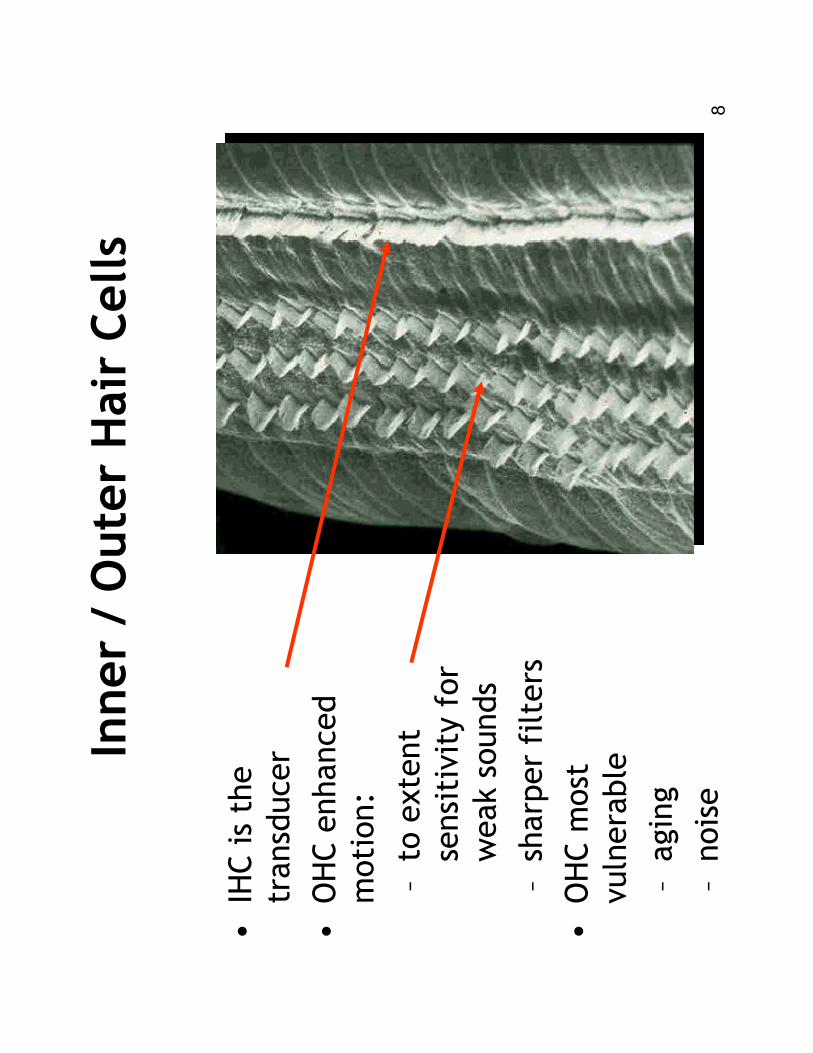
Inner / Outer Hair Cells
•IHC is the
transducer
•OHC enhanced
motion:
–to extent
sensitivity for
weak sounds
–sharper filters
•OHC most
vulnerable
–aging
–noise
9
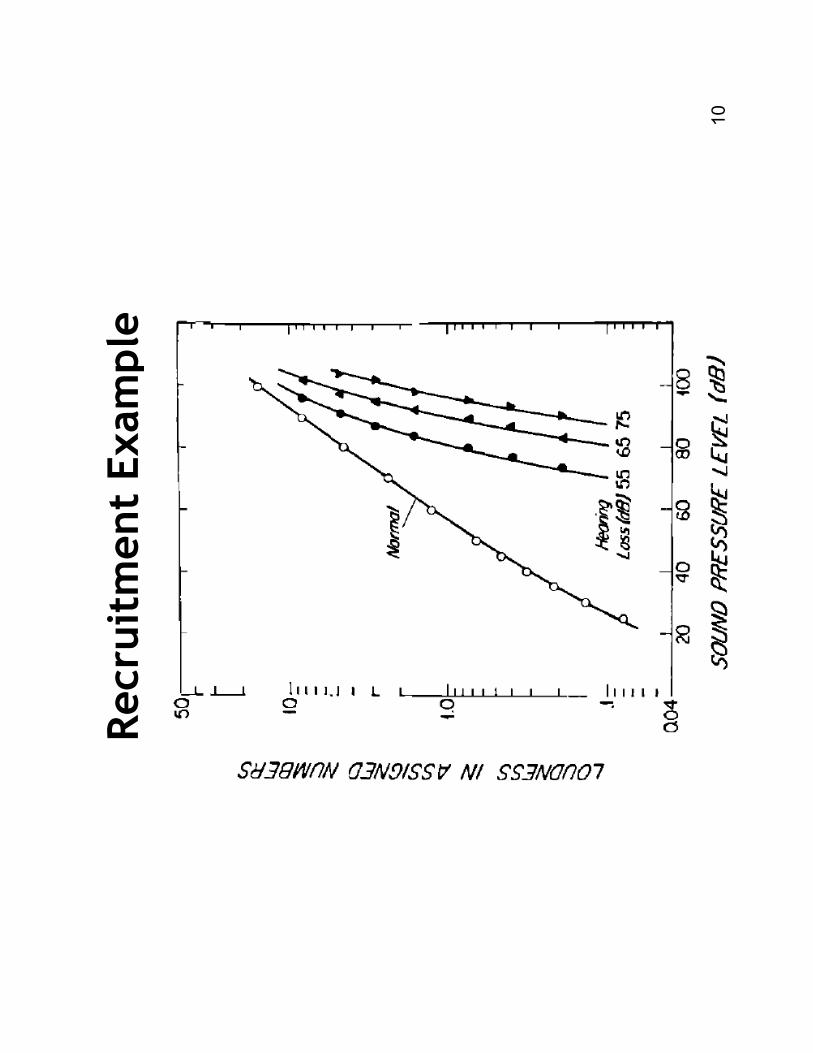
Recruitment
•Reduced dynamic range in impaired ear
–Healthy cochlea has instantaneous compression
–Loss of active OHC gain mechanism in impairment
–Reduced cochlear gain, increased filter bandwidth
–Impaired ear is more linear than healthy ear
–Recruitment = abnorm
al rapid increase in loudness
–Loudness at 100 dB SPL approx equal
•Compression
–Compensate for OHC damage
–High face validity
–Benefits in practice are mixed
10
Recruitment Example
11
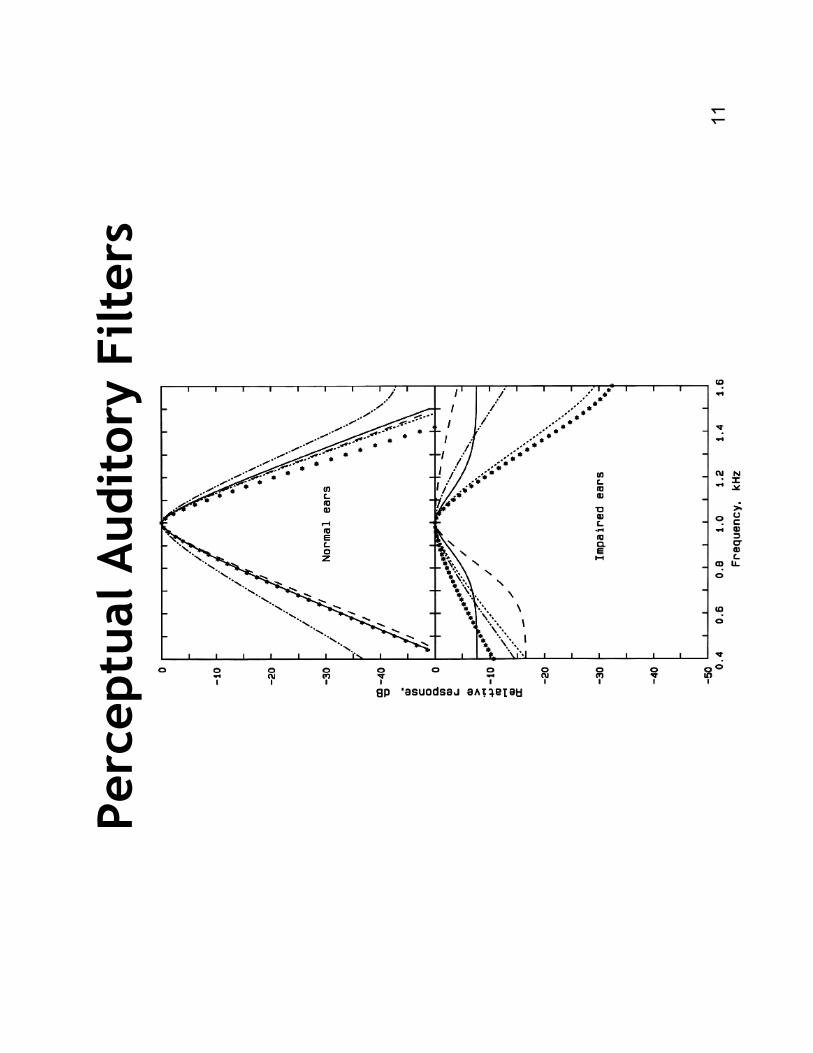
Perceptual Auditory Filters
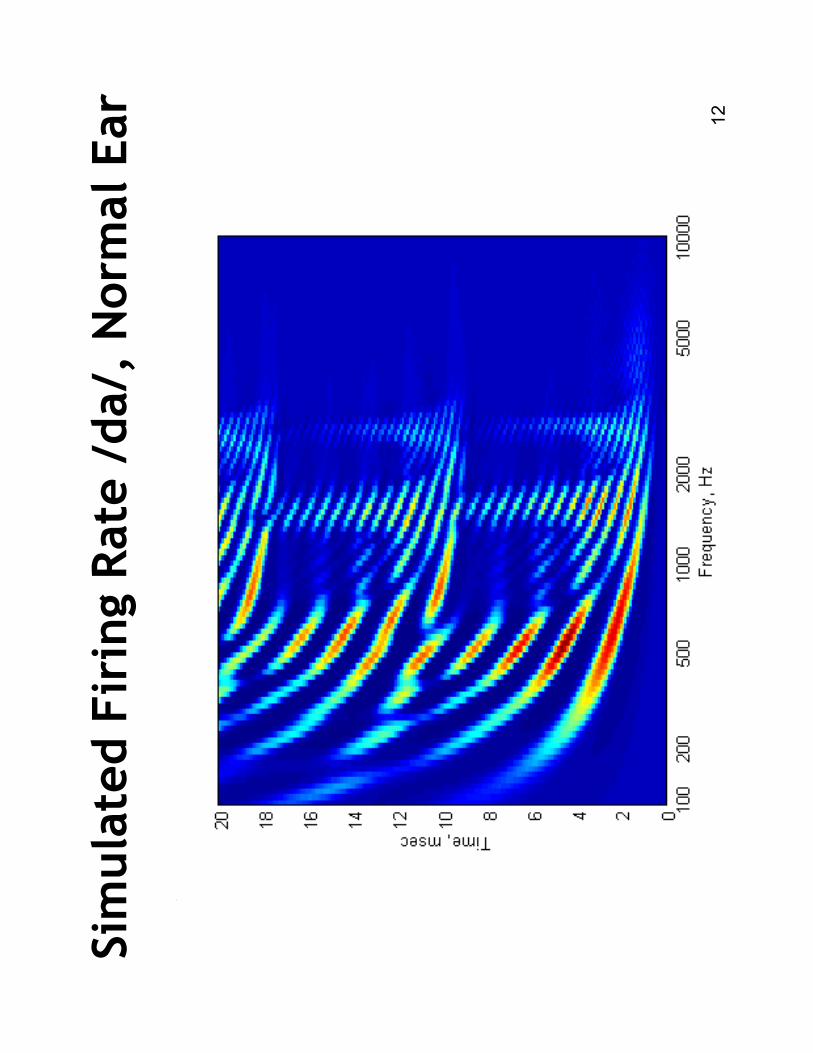
12
Simulated Firing Rate /da/, Norm
al Ear
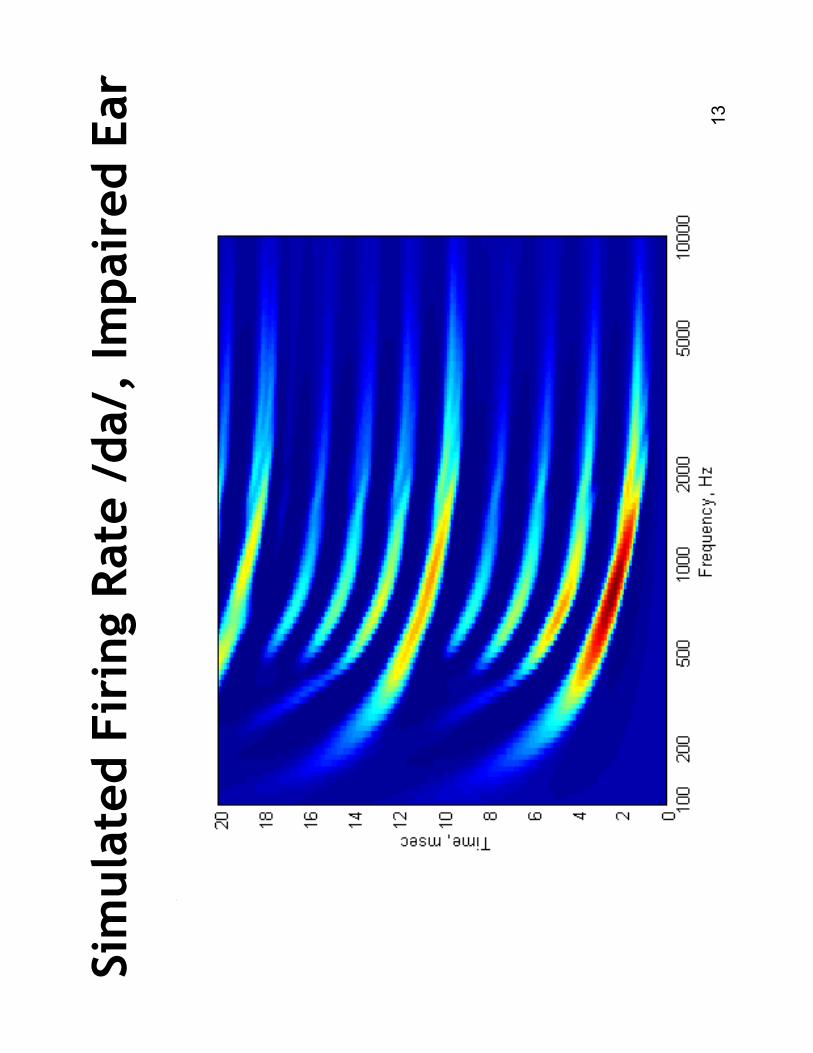
13
Simulated Firing Rate /da/, Impaired Ear
14
Hearing Loss Conclusions
•Outer hair-cell damage
–Shift in auditory threshold
–Recruitment: Impaired system is more linear
–Broader auditory filters
•Inner hair-cell damage
–Shift in auditory threshold
–“Dead regions”
with no response
•Can not perceive low-intensity speech sounds
•Difficulty in noise and reverberation
Hearing Aid Types and
Processing Constraints
16
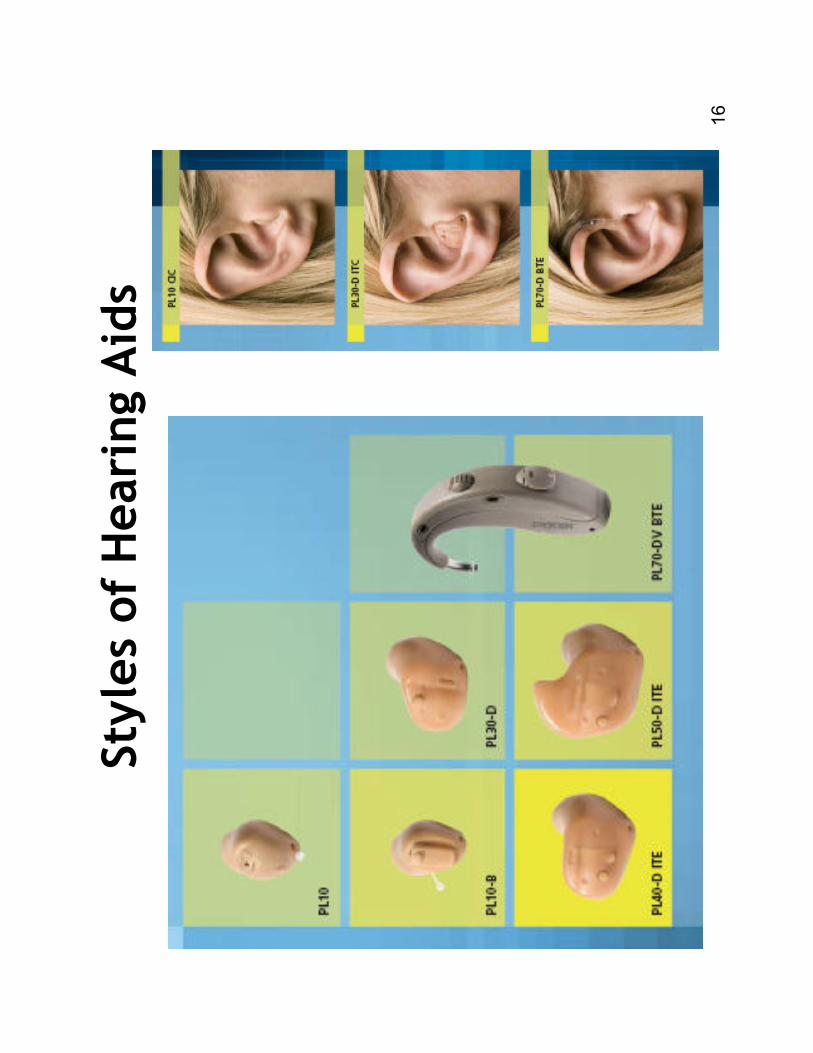
Styles of Hearing Aids
17
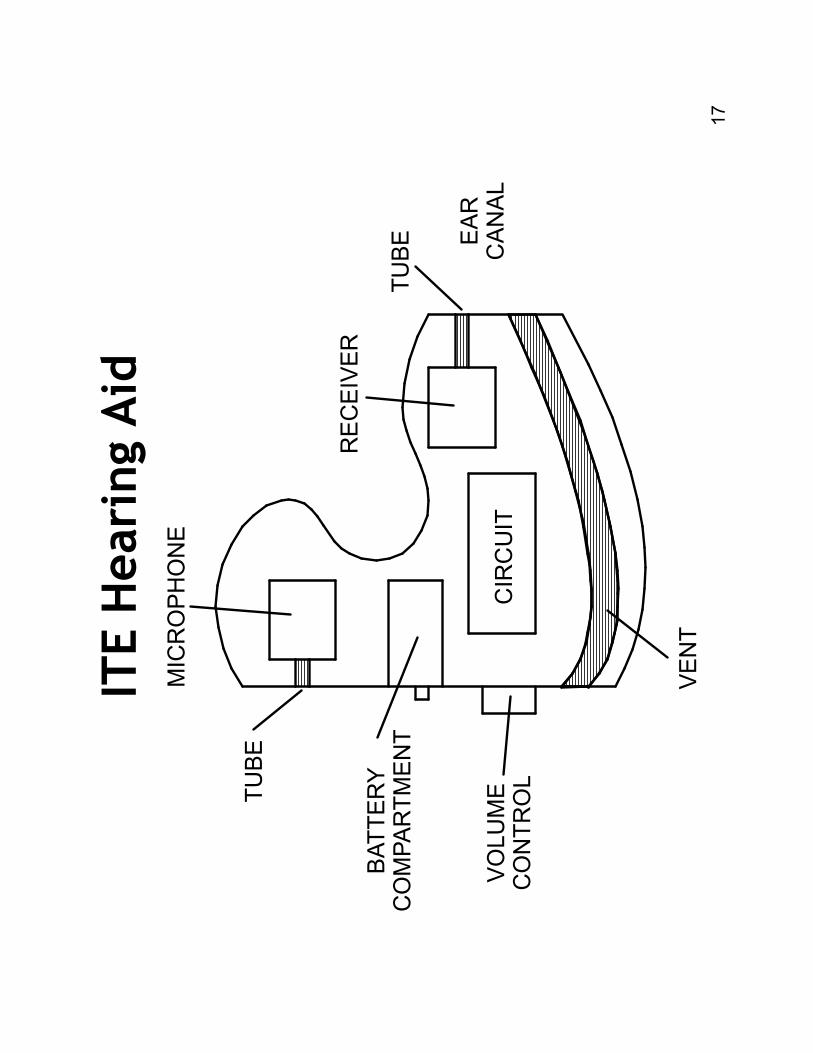
ITE Hearing Aid
MIC
RO
PH
ON
E
TU
BE
BATTER
YC
OM
PAR
TM
EN
T
VO
LU
ME
CO
NTR
OL
REC
EIV
ER
TU
BE
CIR
CU
IT
VEN
T
EAR
CAN
AL
18
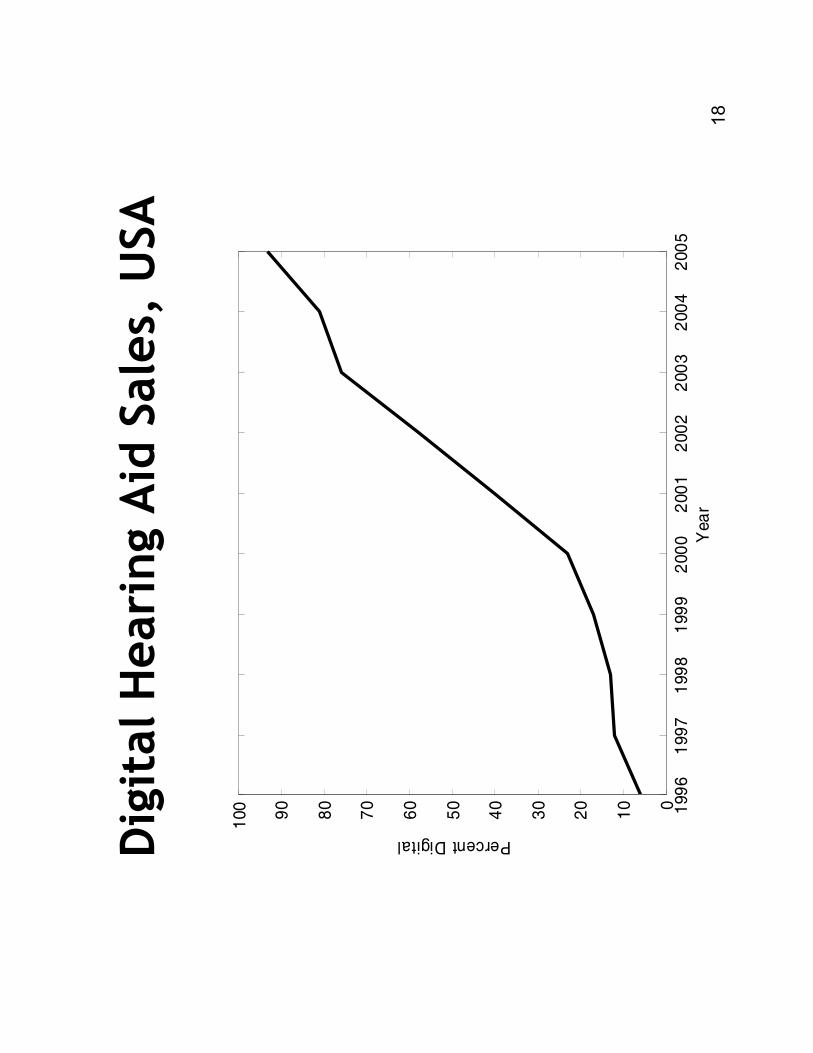
Digital Hearing Aid Sales, USA
199
61
99
71
99
81
99
92
00
02
00
12
00
22
00
32
00
42
00
50
10
20
30
40
50
60
70
80
90
100
Yea
r
Percent Digital
19
Factors Affecting Power Use
•N
um
ber of Tra
nsis
tors
–Tra
nsis
tor siz
e d
ecre
asin
g o
ver tim
e
–C
ircuit c
om
ple
xity incre
asin
g
•W
ord
Siz
e–
Fix
ed p
oin
t vs. floating p
oin
t
–Long d
igital w
ord
giv
es b
etter sound q
ualit
y
–Adder and m
ultip
lier in
cre
ase in c
om
ple
xity
–M
em
ory
pro
portio
nal to
word
siz
e
•C
lock R
ate
–Slo
w rate
reduces b
attery
dra
in
–C
onstrain
s a
lgorith
m c
om
ple
xity
•Voltage
•Alg
orith
ms
20
Digital Processor Comparison
•Pers
onal C
om
pute
r–
6400 M
IPS (Xbox 3
60)
–1 to 2
GB m
em
ory
–D
raw
s 2
0 W
–Fits o
n c
ircuit b
oard
•H
earing A
id–
4 to 8
MIP
S
–4 to 8
kW
mem
ory
–D
raw
s 1
mW
–Fits insid
e h
earing a
id
21
Hardware Conclusions
•H
earing A
ids H
ave B
ecom
e D
igital D
evic
es
•D
igital Advanta
ges
–Pro
gra
mm
able
pro
cessor
–Alg
orith
m c
om
ple
xity
–Pro
cessin
g featu
res
–Fitting fle
xib
ility
•D
igital Lim
itations
–Pow
er consum
ption a
nd b
attery
life
–C
ircuit s
ize
–C
ost of circuit a
nd s
pecia
lized D
SP c
hip
develo
pm
ent
Dynamic-Range
Compression
23
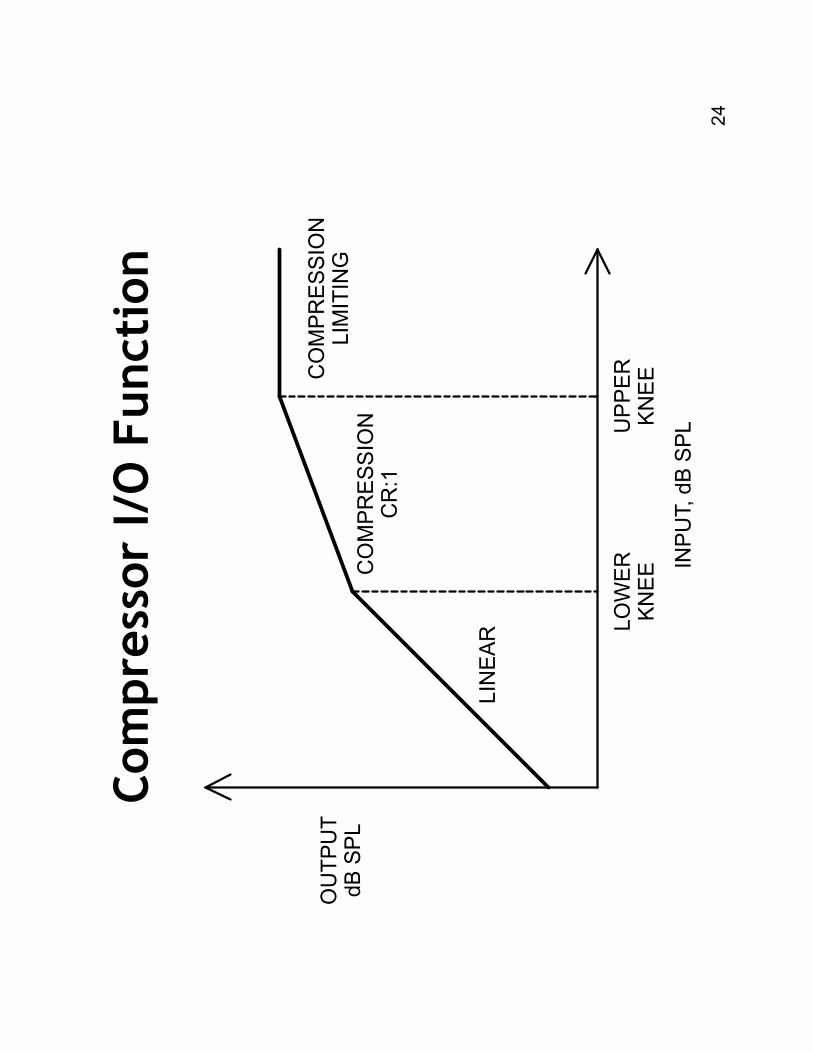
Compression Rules
•Processing steps
–Detect signal level
–Convert to dB SPL
–Compute gain using input/output relationship
–Multiply signal by gain
•Piece-wise linear function
–Kneepointswhere slope changes
–Linear at low levels: Minimize amplification of noise
–Compression limiting at high levels: Avoid UCL
•Gain = output level –input level in dB
24
Compressor I/O Function
LIN
EA
R
CO
MP
RE
SS
ION
CR
:1
CO
MP
RE
SS
ION
LIM
ITIN
G
LO
WE
RK
NE
EU
PP
ER
KN
EE
INP
UT, dB
SP
L
OU
TP
UT
dB
SP
L
25
Envelope Detection
•Track incoming signal level
•Response depends on sign of signal changes
–Rapid response to increases in signal level (attack)
–Slower response to decreases (release)
–Defined by attack and release time constants
•Fast attack
–Signals tend to increase more rapidly than decrease
–Prevent over-amplification of large sudden increase
•Slow release
–Rapid gain changes cause audible modulation
–Hold gain relatively constant during syllables
26
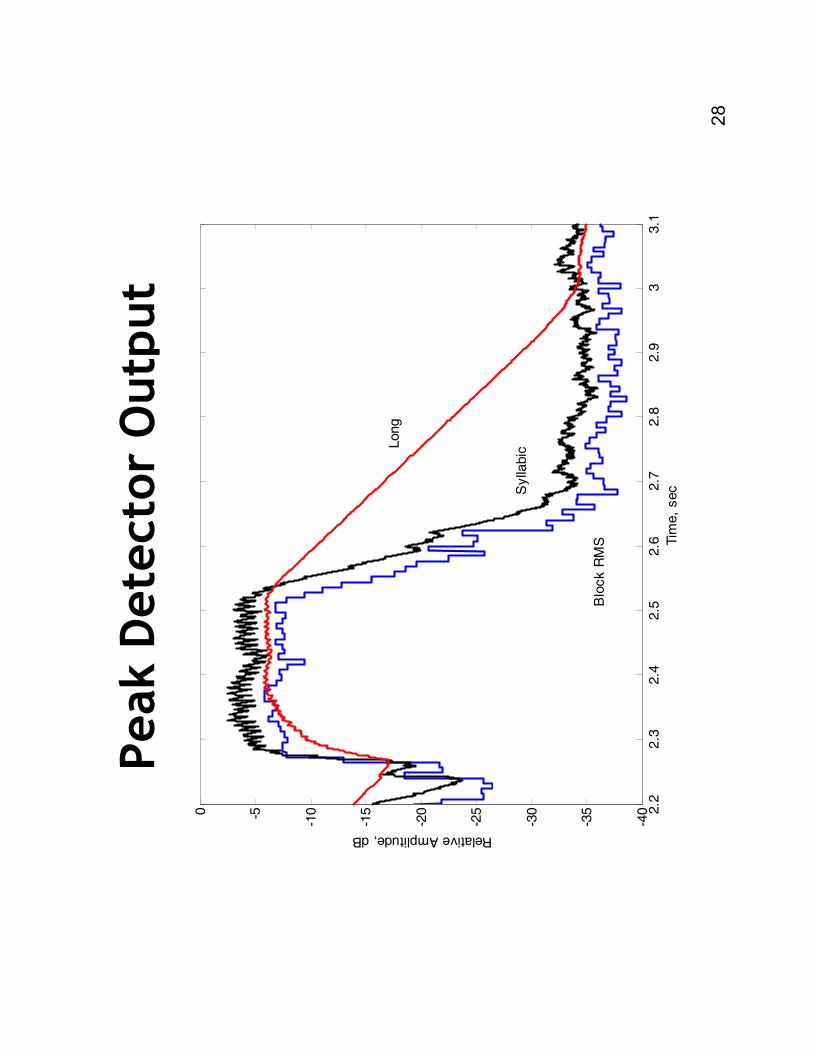
Peak Detection
•Follow increase with fast time constant
•Follow decrease with slow time constant
end
)n(
d)n(
d
else
)n(
x)
()
n(d
)n(
d
)n(
d)n(
xif
1
11
1 −=
−+
−=
−≥
β
αα
27
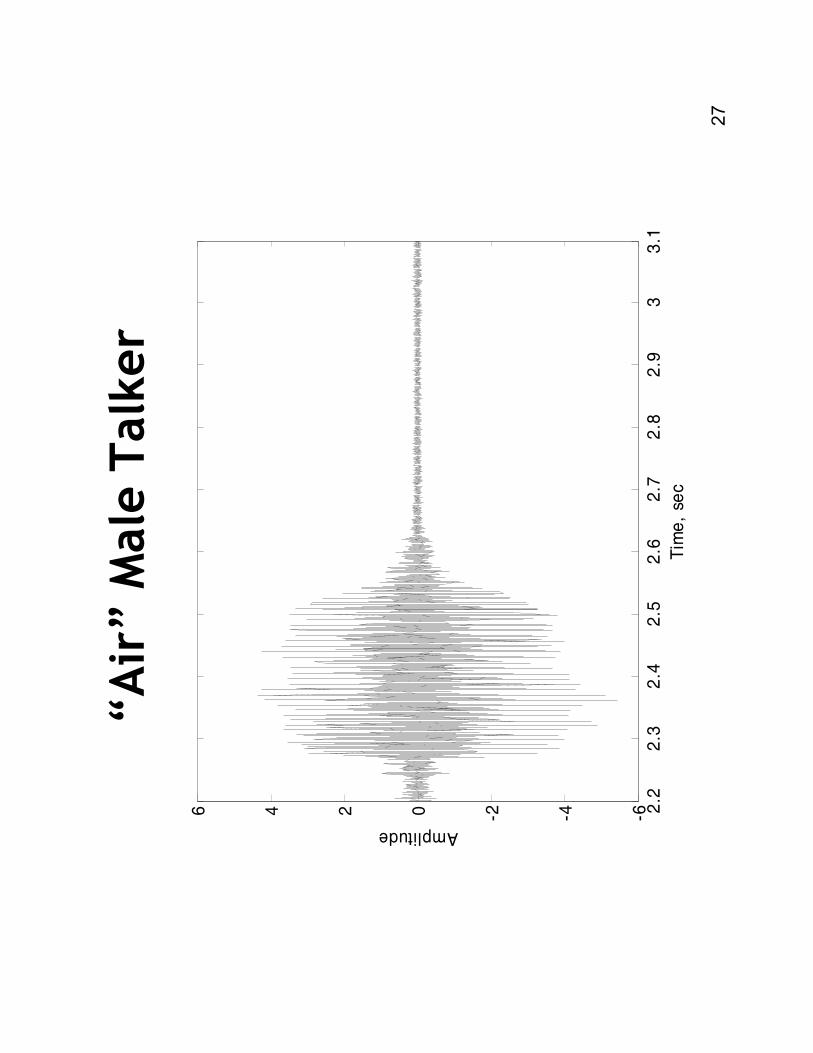
“Air”Male Talker
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
33
.1-6-4-20246
Tim
e,
sec
Amplitude
28
Peak Detector Output
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
33.1
-40
-35
-30
-25
-20
-15
-10-50
Tim
e,
sec
Relative Amplitude, dB
Long
Sylla
bic
Blo
ck R
MS
29
Multichannel Compression
•Frequency analysis
–Filter bank
–FFT
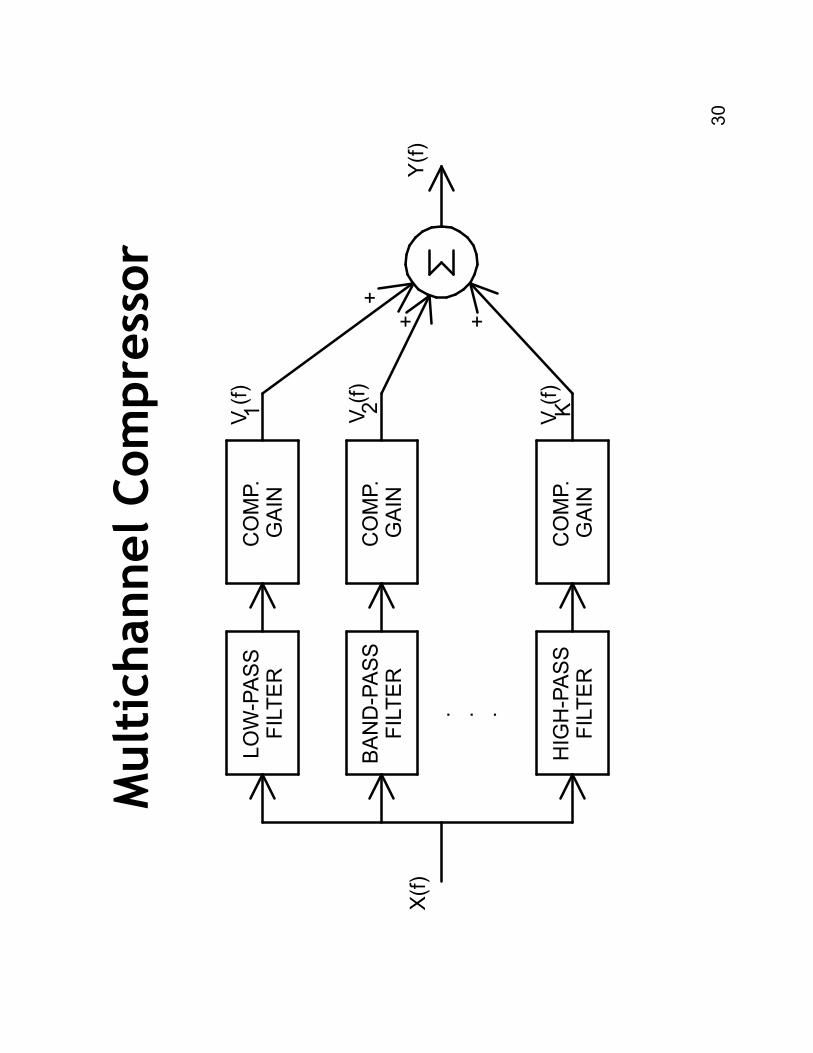
•Filter bank
–Auditory frequency spacing
–Independent compression in each frequency band
–Gain set in response to preceding signal level
–Response to signal change depends on time
constants
30
Multichannel Compressor
LO
W-P
AS
SFIL
TE
R
BA
ND
-PA
SS
FIL
TE
R
HIG
H-P
AS
SFIL
TE
R
CO
MP.
GA
IN
CO
MP.
GA
IN
CO
MP.
GA
IN
+
+ +
Y(f)
X(f)
. . .
V (f)
V (f)
V (f)
1 2 K
31
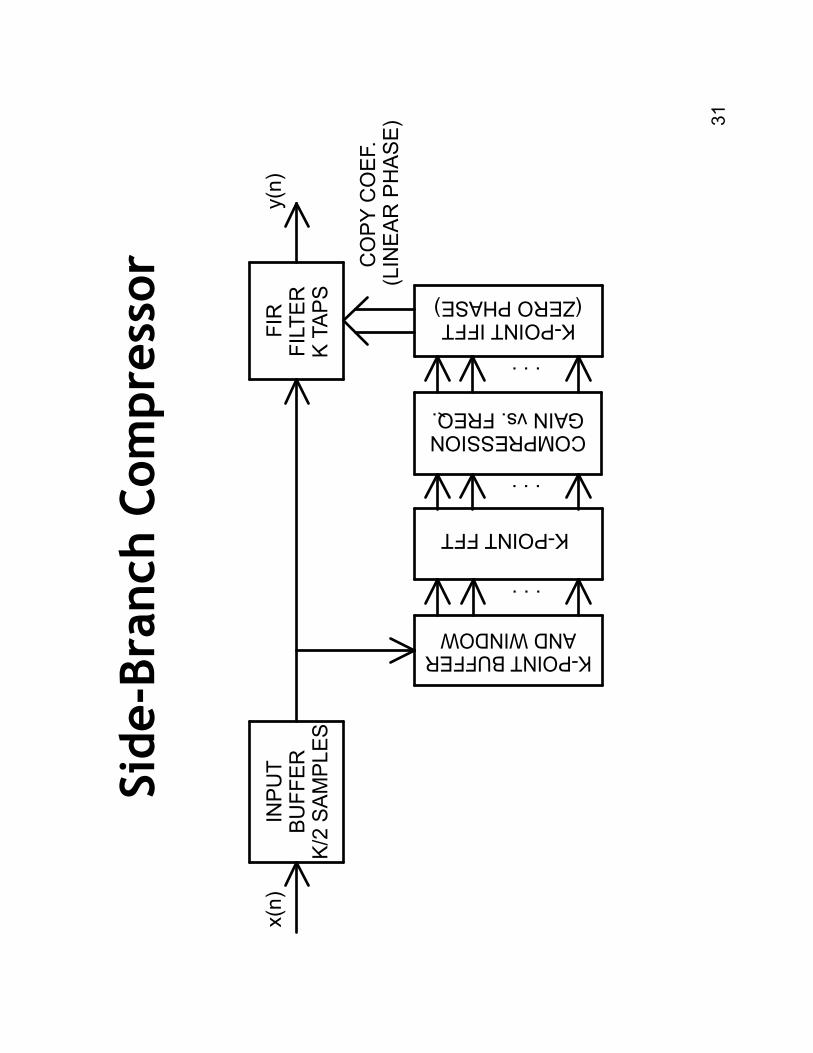
Side-Branch Compressor
y(n
)x(n
)IN
PU
TB
UFFE
RK
/2 S
AM
PLES
FIR
FIL
TE
RK
TA
PS
K-POINT FFT
COMPRESSIONGAIN vs. FREQ.
K-POINT IFFT(ZERO PHASE)
. .....
CO
PY C
OE
F.
(LIN
EA
R P
HA
SE)
K-POINT BUFFERAND WINDOW
...
32
Frequency W
arping
•FFT problems
–Uniform
frequency spacing
–Resolution at low frequencies is poor
–Need long delay to get good low-frequency analysis
•Goals of frequency warping
–Auditory frequency analysis
–Reduced group delay
–Reasonable computational requirements
•Want group delay < 10 msec
•Used in GN ReSound products
33
Warped Filter Structure
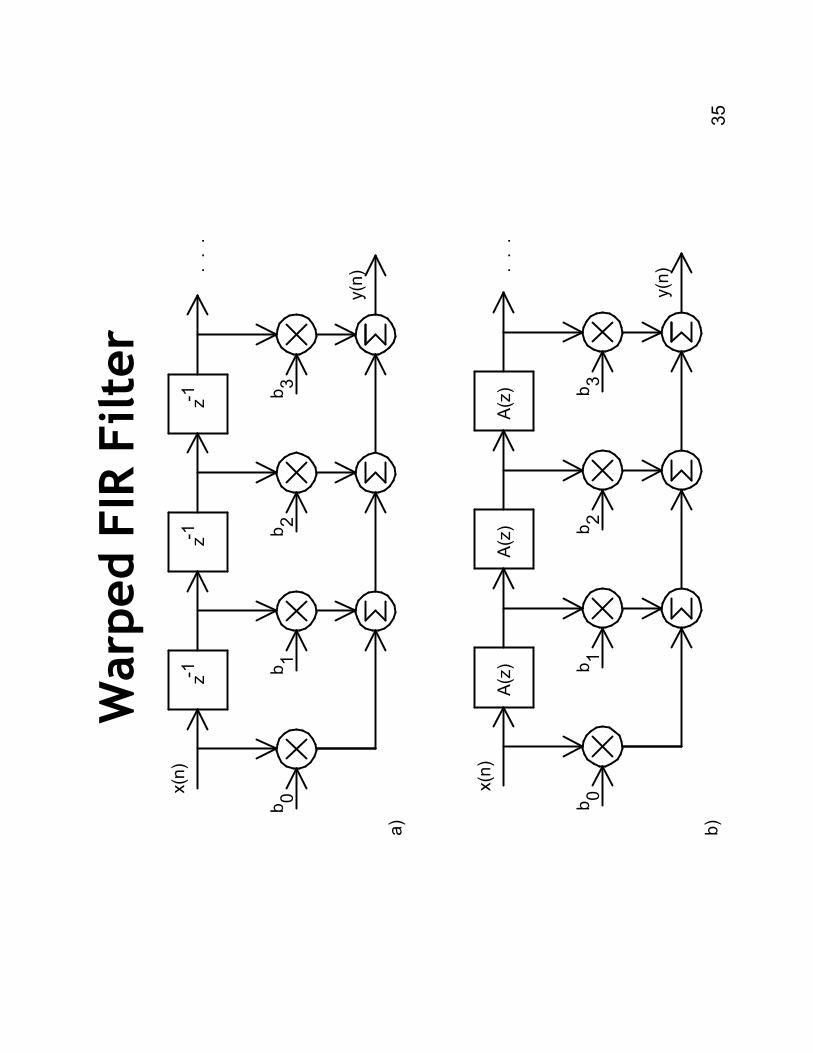
•Replace unit delays with all-pass filters
–FIR filter sums outputs at different delays
–Cascade of all-pass filters for cascade of unit delays
–Warped FIR sums outputs of all-pass filters
•Effects of the all-pass filters
–Low frequencies delayed from filter to filter
–Separation between filtered samples at low
frequencies > unit sample
–Separation at high frequencies < unit sample
34
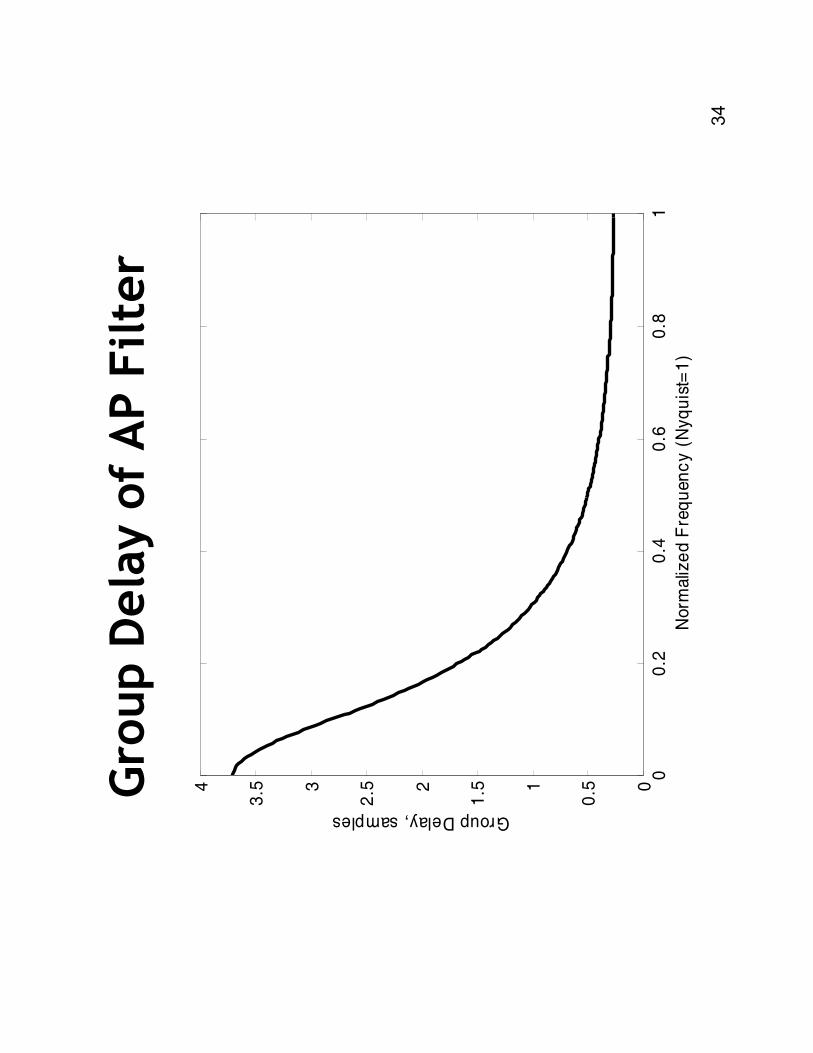
Group Delay of AP Filter
00
.20
.40
.60
.81
0
0.51
1.52
2.53
3.54
Norm
aliz
ed F
req
uen
cy
(N
yq
uis
t=1
)
Group Delay, samples
35
Warped FIR Filter
. . .
zz
zx(n
)
y(n
)
bb
bb
-1-1
-1
01
23
x(n
)
y(n
)
bb
bb
01
23
A(z
)A
(z)
A(z
). . .
a)
b)
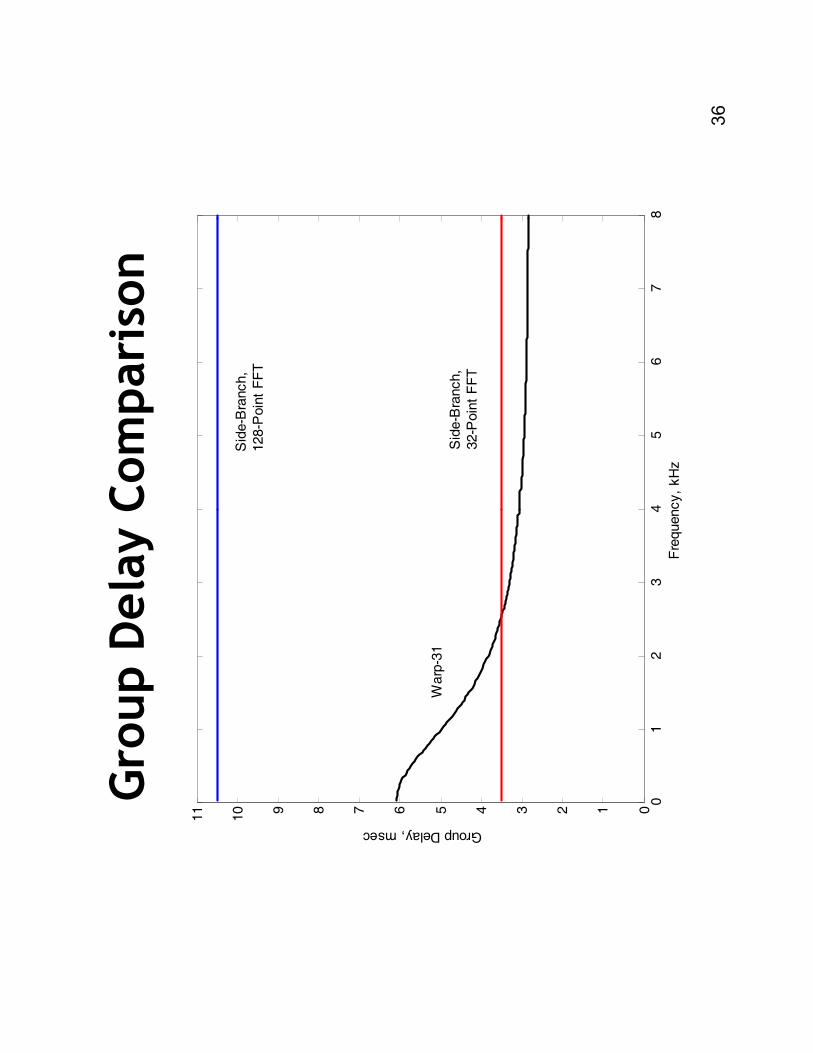
36
Group Delay Comparison
01
23
45
67
80123456789
10
11
Fre
quency,
kH
z
Group Delay, msec
Warp
-31
Sid
e-B
ranch,
32-P
oin
t F
FT
Sid
e-B
ranch,
128-P
oin
t F
FT
37
Warped Compressor Example
•Input
•Sampling rate
22.05 kHz
•16 bits
•23-band compressor
•Atttime=5 msec
•Reltime=70 msec
•CR=2:1 all bands
•Input at 65 dB SPL
38
Compression Conclusions
•Helps at low signal levels
•Compression ratio
–Generally prefer CR < 2:1
–Want lower CR as noise level increases
–Comp preferred if residual dynamic range < 30 dB
•Number of Channels
–No clear benefit to increasing the number of bands
–One channel shows sm
all benefit compared to multi
–Compressor co-modulates noise to match speech
Noise Suppression
40
Spectral Subtraction
•Estimate clean power spectrum
–Start with power spectrum of the noisy speech
–Estimate the noise power spectrum
–Clean spectrum approximated by noisy speech
spectrum minus estimated noise spectrum
–Goal: envelope of noisy speech matches clean speech
•Problems
–Can not extract actual noise signal, only its statistics
–Signal reconstructed using noisy phase
–Gain changes from segment to segment, causing
“musical noise”
41
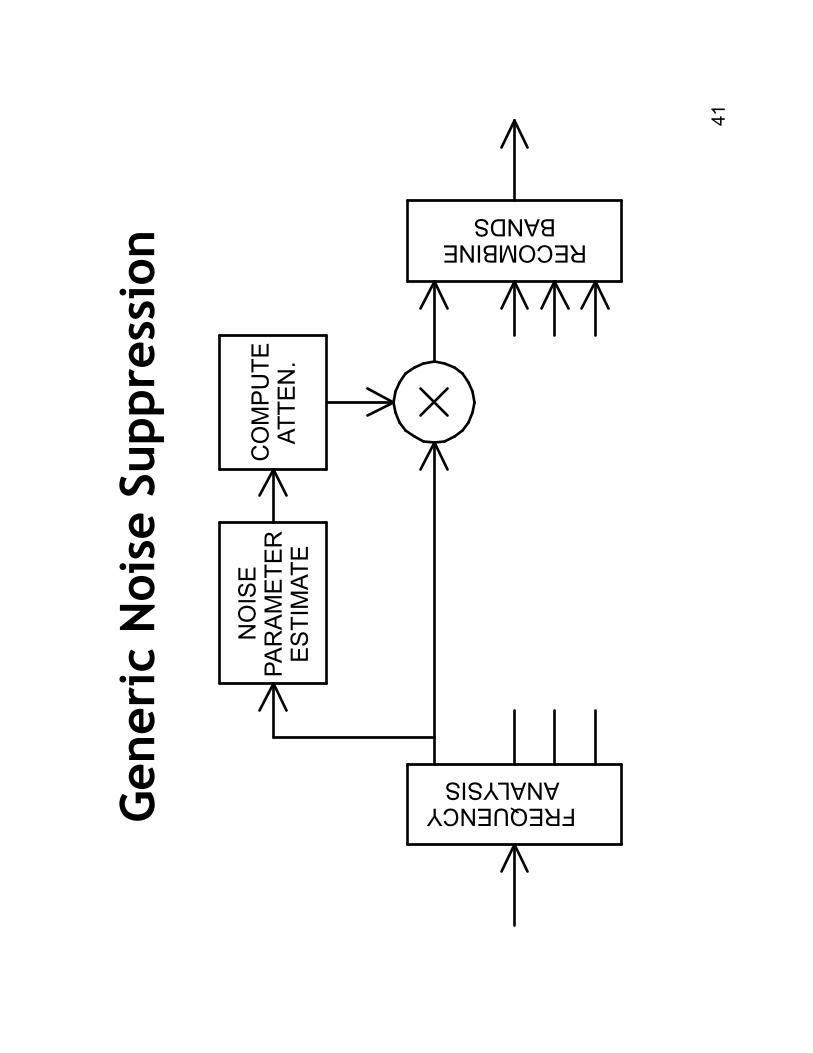
Generic Noise Suppression
NO
ISE
PA
RA
ME
TE
RE
STIM
ATE
CO
MP
UTE
ATTE
N.
FREQUENCYANALYSIS
RECOMBINEBANDS
42
Noise Estimation
•Spectral subtract needs accurate noise estimate
•Voice activity detection
–Monitor signal segment by segment
–Determ
ine if segment is speech or noise
–Update noise statistics during noise segment
–Hold statistics constant during speech segment
•Continuous noise estimation
–Adjust noise statistics on every segment
–Update rate based on probability that segment is
noise
–Reduced computation better match to hearing aid
43
Hirsch-EhrlicherAlgorithm
•Incoming noisy signal:
•Noise estimate:
•Update the noise estimate
)m,
k(
X
)m,
k(
N
end
)m,
k(
X)a
()
m,k(
Na
)m,
k(
N
else
)m,
k(
N)
m,k(
N
)m,
k(
Nb
)m,
k(
Xif
−+
−=
−=
−>
11
1
1
44
Histogram Estimation
•Sample each noisy speech segment
•Assign segment to closest histogram bin
–Histogram bins contain count of number of segments
at that intensity level
–Decay contents of all bins
–Increment contents of assigned bin
•Find peak of noise distribution
–Model as two Gaussian distributions
–Assume noise lower distribution
–Search for peak below the mean
45
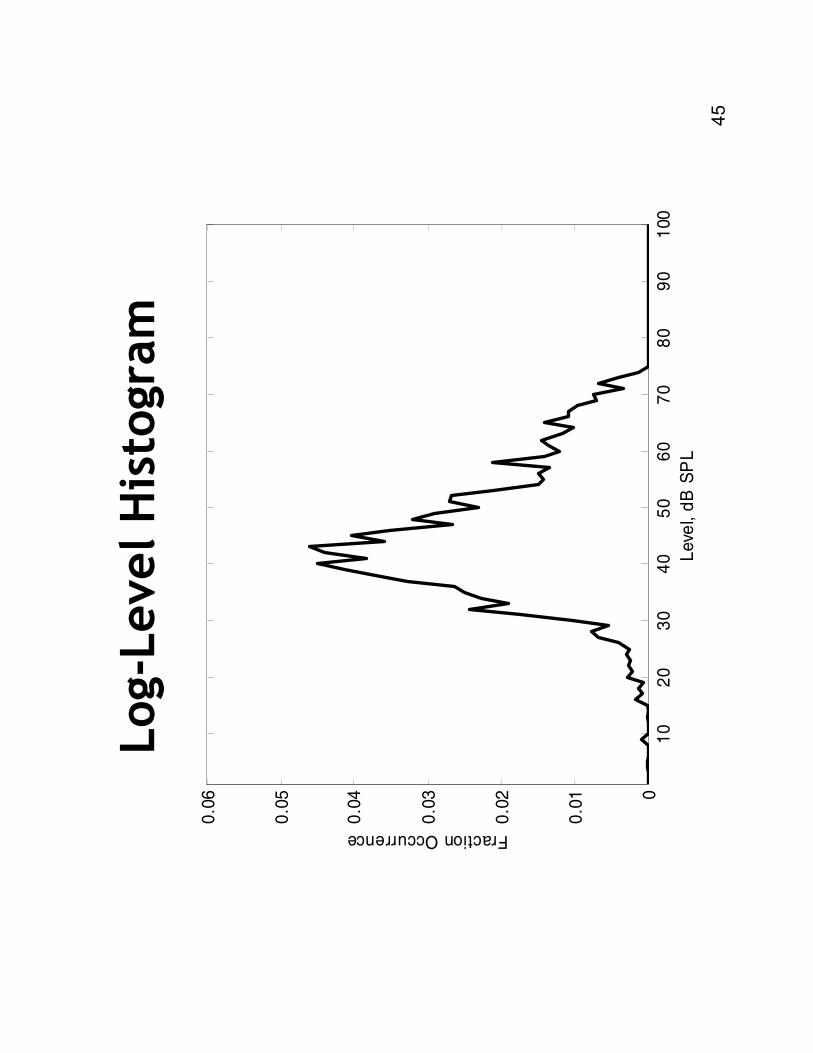
Log-Level Histogram
10
20
30
40
50
60
70
80
90
100
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0.0
6
Leve
l, d
B S
PL
Fraction Occurrence
46
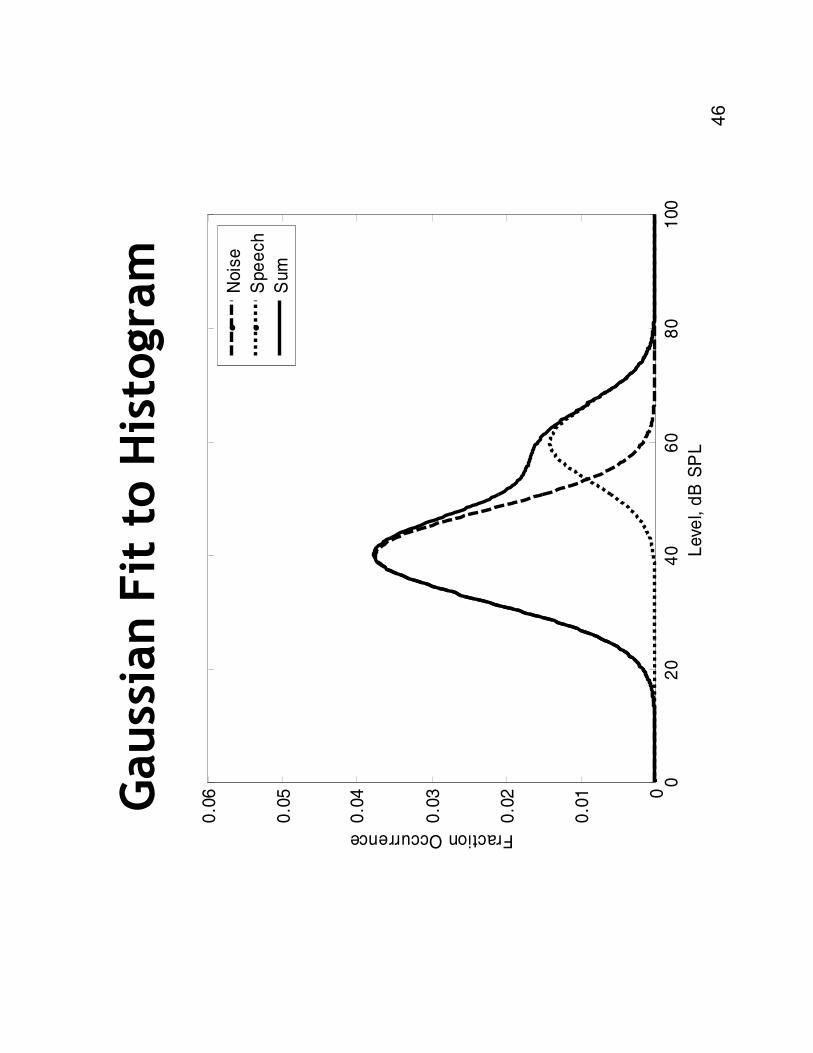
Gaussian Fit to Histogram
02
04
06
08
01
00
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0.0
6
Leve
l, d
B S
PL
Fraction Occurrence
Nois
e
Spe
ech
Sum
47
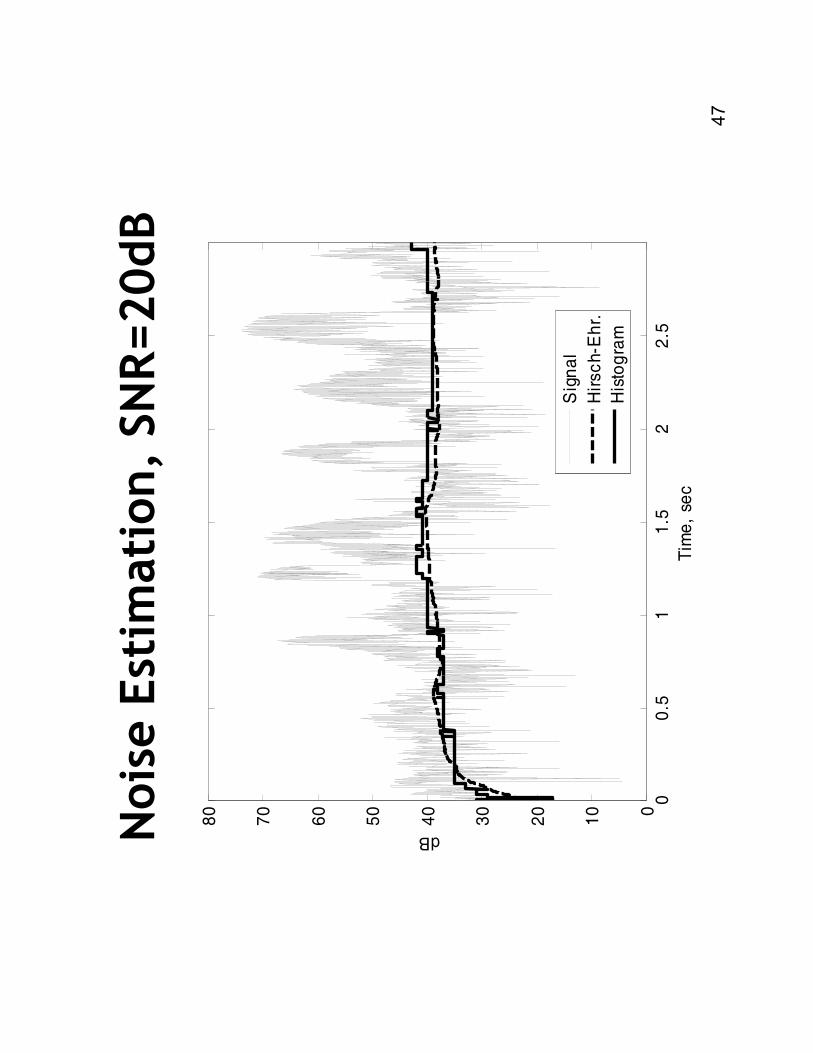
Noise Estimation, SNR=20dB
00
.51
1.5
22
.50
10
20
30
40
50
60
70
80
Tim
e,
sec
dB
Sig
na
l
Hir
sc
h-E
hr.
His
tog
ram
48
Wiener Filter Calculation
•Noisy signal x(n)=s(n)+d(n), output y(n)
•Min MSE between output and clean input
•Optimal filter:
•Approx from noisy speech and estimated noise:
[]
∑−
=n
)n(y
)n(s
2ε
22
2
)f(
D)f(S
)f(S
)f(
G+
=
2
22
)f(
X
)f(
N)f(
X)f(
G−
≈
49
Adaptive W
iener Filter
•Time-varying signal and noise estimates
–Signal spectrum: Replace X(f) with X(k,m
)
–Noise spectrum: Replace N(f) with N(k,m
)
•Time-varying gain G
W(k,m
) in band k, block m
22
2
22
1)
m,k(
X
)m,
k(
N
)m,
k(
X
)m,
k(
N)
m,k(
X)
m,k(
GW
−=
−=
50
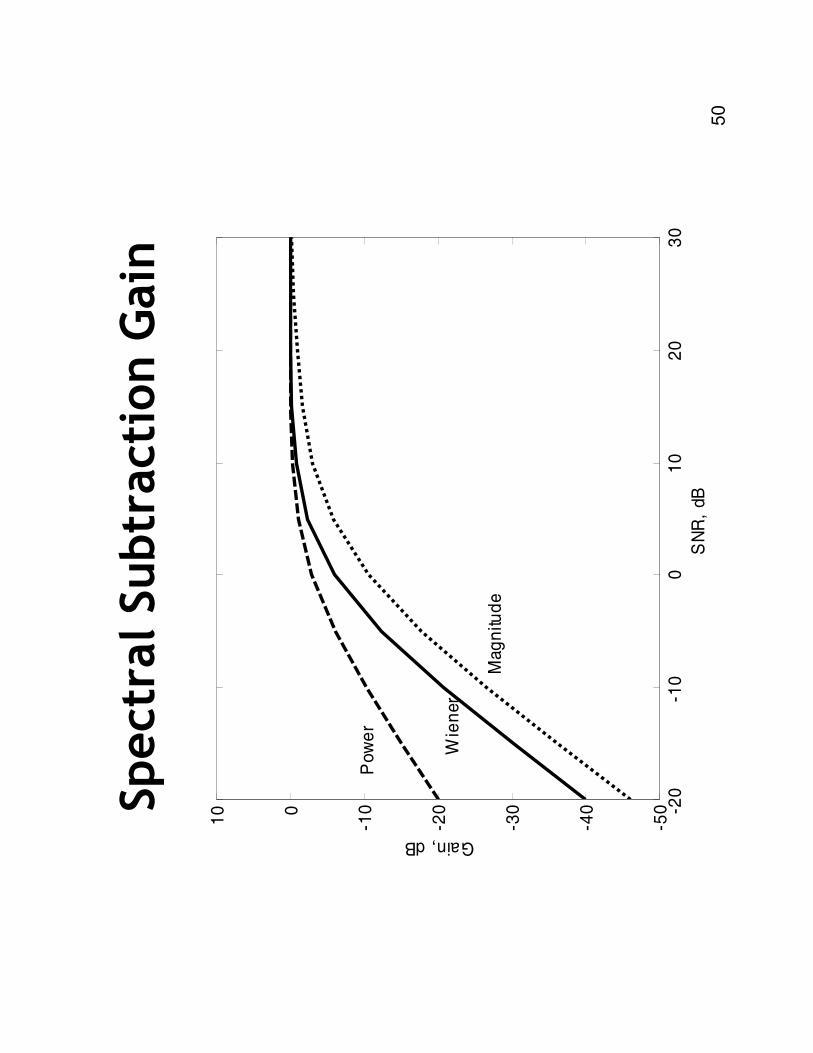
Spectral Subtraction Gain
-20
-10
01
02
03
0-5
0
-40
-30
-20
-100
10
SN
R,
dB
Gain, dB
Pow
er
Wie
ner
Mag
nitu
de
51
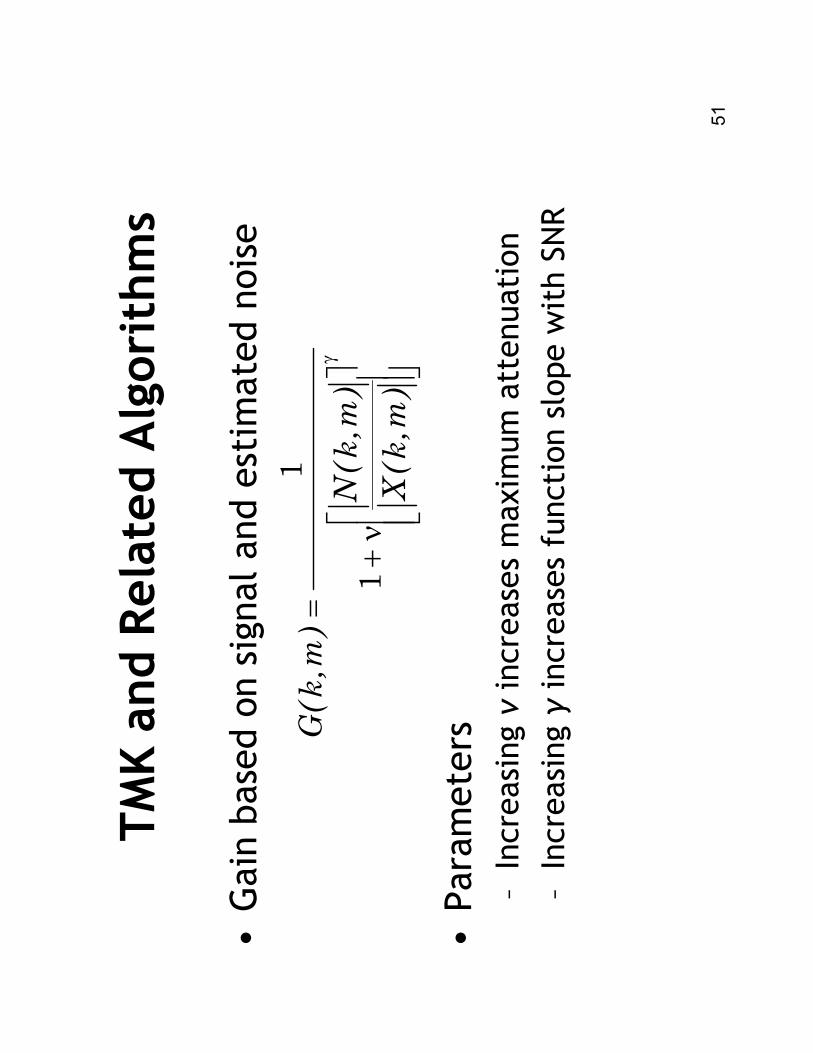
TMK and Related Algorithms
•Gain based on signal and estimated noise
•Parameters
–Increasing νincreases maximum attenuation
–Increasing γincreases function slope with SNR
γ
ν+
=
)m,
k(
X
)m,
k(
N)
m,k(
G
1
1
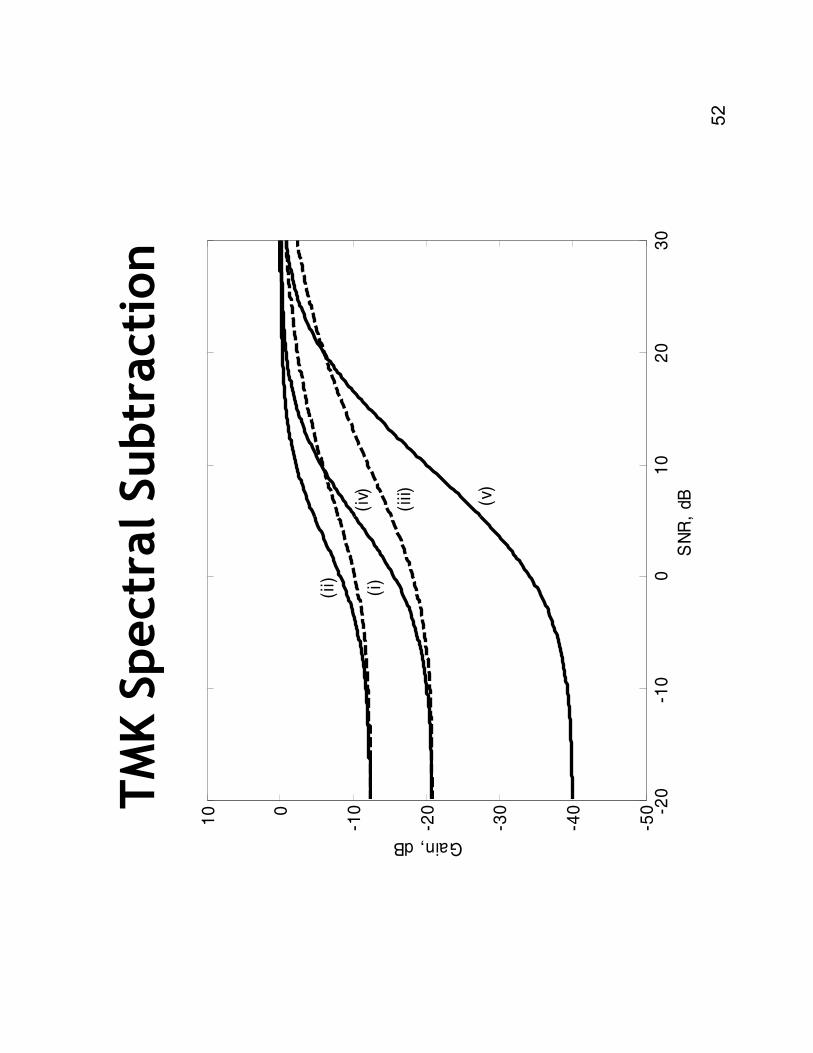
52
TMK Spectral Subtraction
-20
-10
01
02
03
0-5
0
-40
-30
-20
-100
10
SN
R,
dB
Gain, dB
(i)
(ii)
(iii)
(iv) (v)
53
Spectral Subtraction Example
•Input
•Sampling rate
22.05 kHz
•16 bits
•Stationary speech-
shaped noise
•SNR=10dB
•23-band warped system
•TMK algorithm
•12-dB maximum
attenuation
54
Noise Suppression Conclusions
•Little improvement in intelligibility
–Depends on algorithm
–TMK and Ephraim-Malahmost effective
•Some improvement in quality
–TMK shows benefit for NH and HI listeners
–Strongest effect in range of 10 to 20 dB SNR
•Greatest benefit in stationary noise
Feedback Cancellation
56
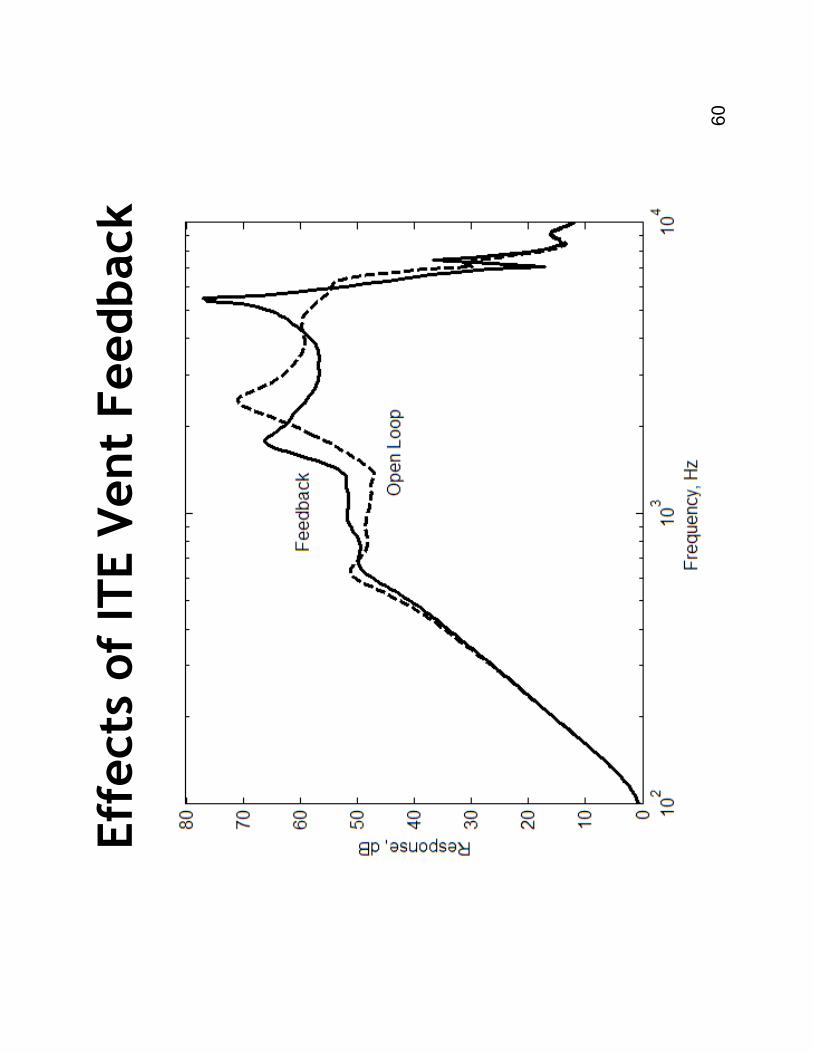
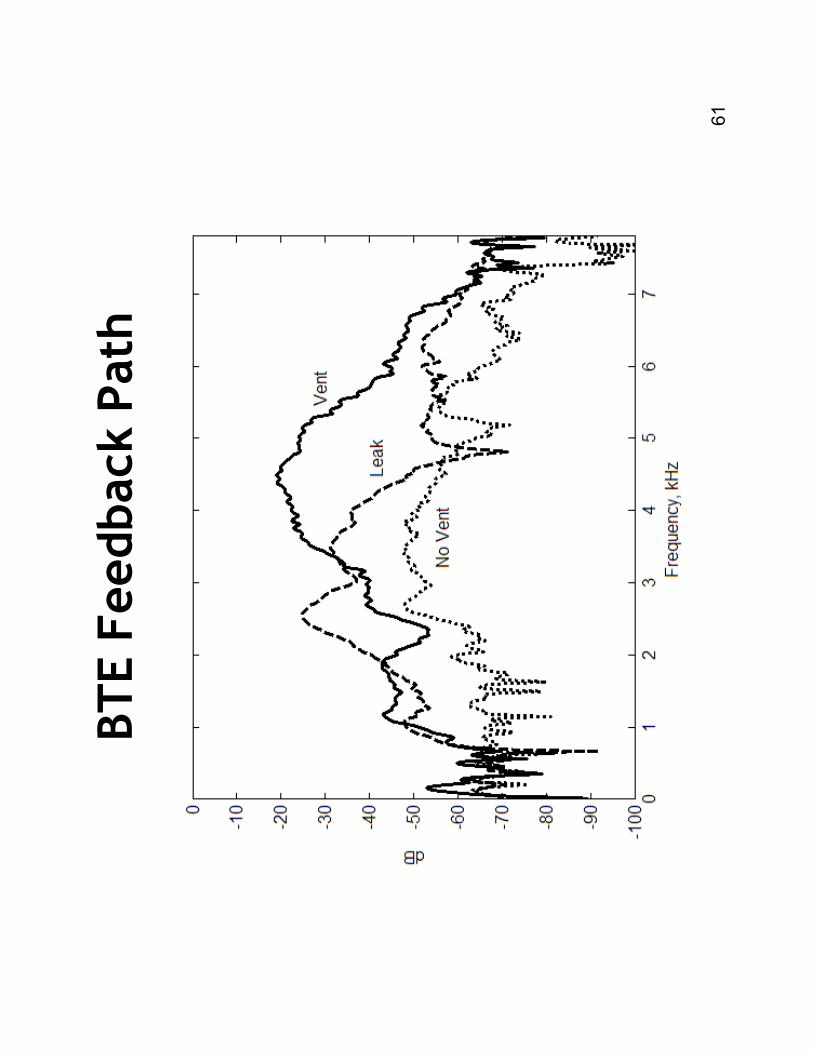
The Problem of Feedback
•Primary sources of feedback
–Acoustic from vent and leaks
–Mechanical from receiver vibration
•Effect on hearing aid
–Instability causes "whistle" or high-frequency tone
–Ringing after sound stops
–Hearing aid amplifier saturates => distortion
•Maximum stable gain
–Maximum gain for operation without whistles
–Problem most acute at high frequencies
57
Algorithm Goals
•Increased gain
–Achieve fitting targets
–Improved speech intelligibility
•No processing artifacts
–Hearing aid always stable
–No whistles due to feedback
–No chirps, momentary tones, or audible gain changes
•Computationally efficient
58
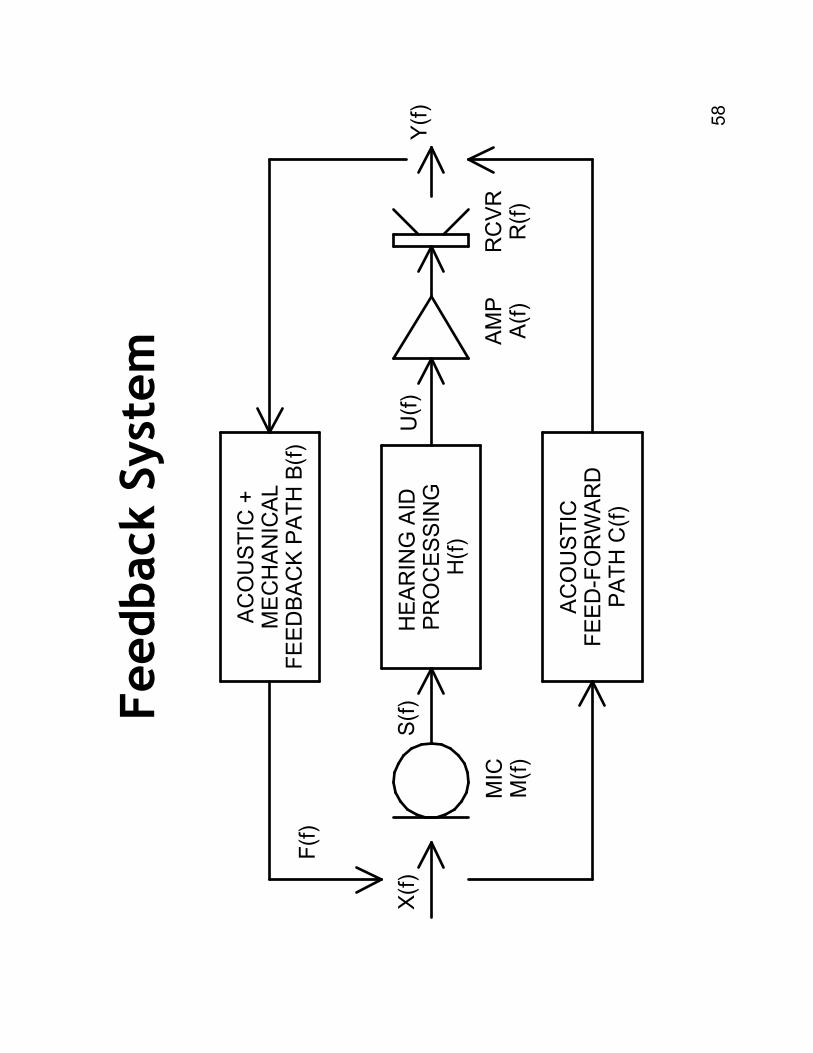
Feedback System
HE
AR
ING
AID
P
RO
CES
SIN
GH
(f)
X(f)
Y(f)
MIC
M(f)
AM
PA
(f)
RC
VR
R(f)
AC
OU
STIC
FE
ED
-FO
RW
AR
DP
ATH
C(f)
AC
OU
STIC
+M
EC
HA
NIC
AL
FE
ED
BA
CK
PA
TH
B(f)
F(f)
U(f)
S(f)
59
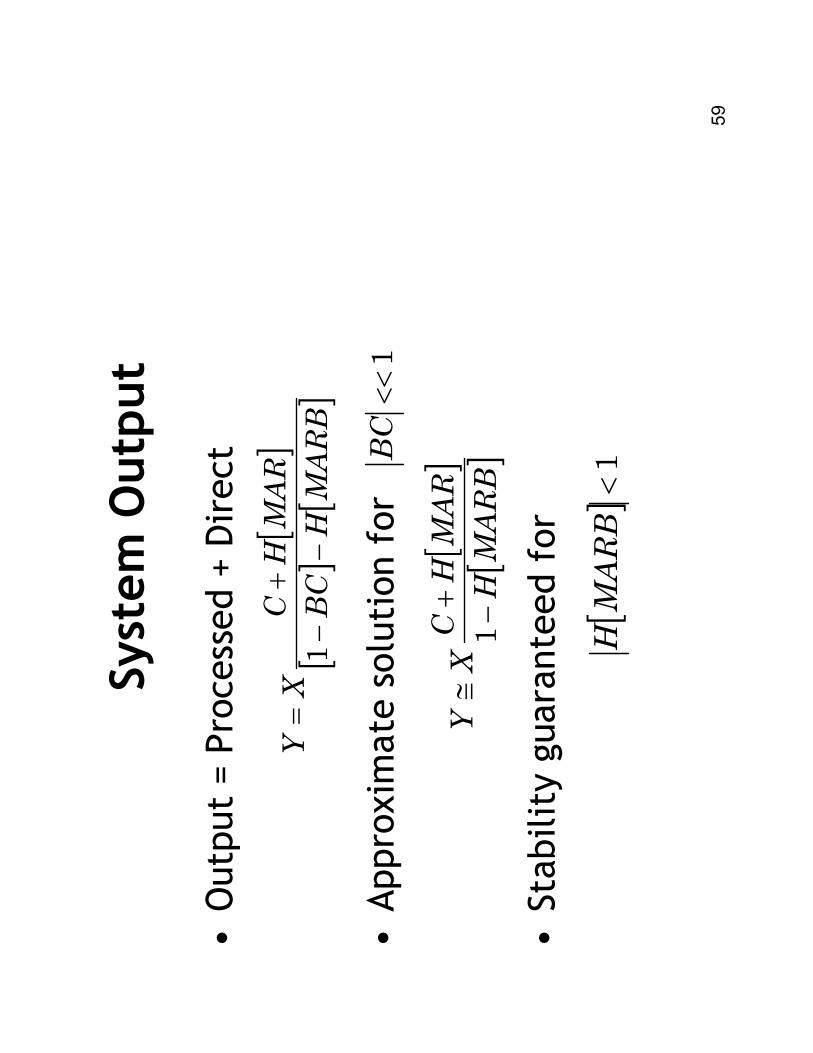
System Output
•Output = Processed + Direct
•Approximate solution for
•Stability guaranteed for[
][
][
]MARB
HBC
MAR
HC
XY
−−
+=
1
1<<
BC
[]
[]
MARB
H
MAR
HC
XY
−+≅
1
[]1
<MARB
H
60
Effects of ITE Vent Feedback
61
BTE Feedback Path
62
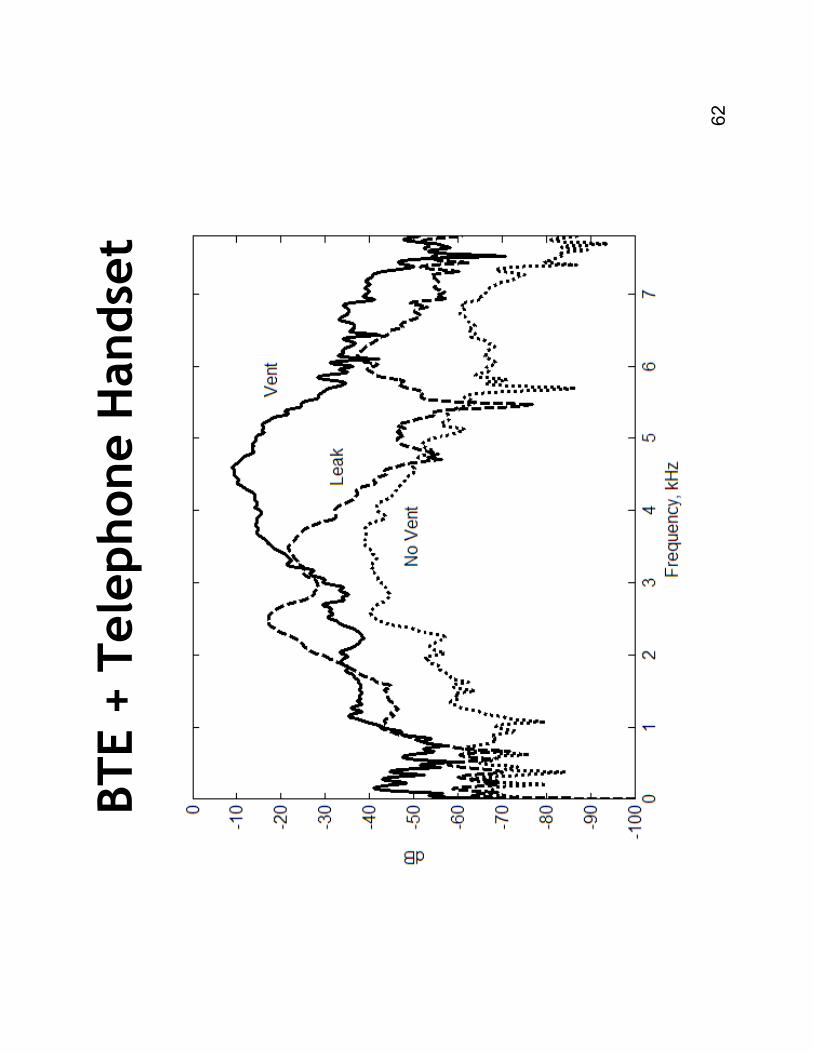
BTE + Telephone Handset
63
Adaptive Feedback Cancellation
•Model feedback path
–Adaptive model to minimize system power
–Subtract model output from microphone signal
•Why adaptive?
–Feedback path can change over time
–Track changes
•Limitations
–Resolution of the feedback path model
–Ability to track rapid changes
–Cancellation of tonal inputs
–Room reverberation
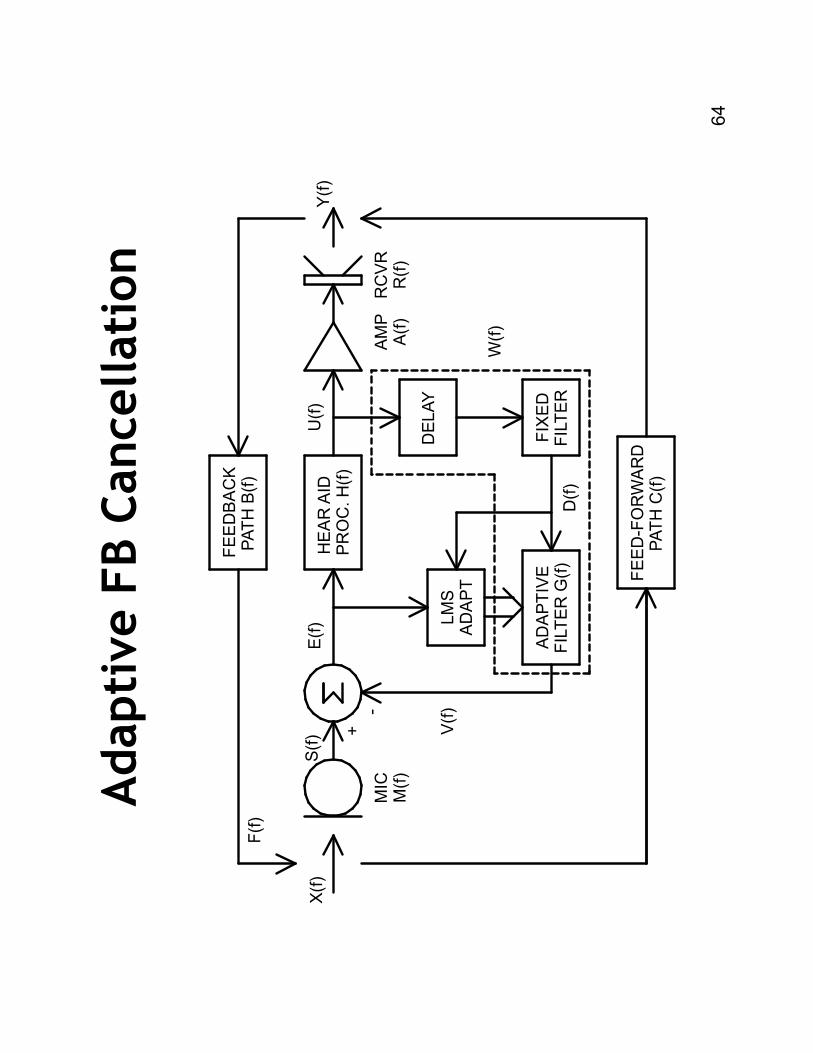
64
Adaptive FB Cancellation
FE
ED
BA
CK
PATH
B(f)
HE
AR
AID
P
RO
C. H
(f)
DE
LAY
LM
SA
DA
PT
FIX
ED
FIL
TE
RA
DA
PTIV
EFIL
TE
R G
(f)
+-
D(f)
X(f)
Y(f)
E(f)
S(f) V
(f)
MIC
M(f)
AM
PA
(f)
RC
VR
R(f)
U(f)
FE
ED
-FO
RW
AR
DPATH
C(f)
F(f)
W(f)
65
Feedback Path Model
•Electroacousticsvary slowly
–Microphone
–Amplifier
–Receiver
•Acoustics can change rapidly
–Telephone handset
–Hat
–Earm
oldshift in the ear canal (jaw movement)
•Model = Fixed in series with adaptive
–Fixed delay + IIR filter for computational efficiency
–Short adaptive FIR filter to model changes
66
System Output
•Output = Processed + Direct
•Approximate solution for
•Stability guaranteed for[
][
][
]{
}BC
WMARB
HBC
MAR
WC
HC
XY
−−
−−
++
=1
1
1<<
BC
[]1
<−W
MARB
H
[]
[]
WMARB
H
MAR
WC
HC
XY
−−
++
≅1
67
LMS Adaptation
•Adapt FIR filter coefficients {gk}
•Minimize error
•Compare error with processed
–Error = microphone output -feedback path model
–Processed = HA output => delay & fixed filter
•Weight update
–Proportional to error
–Trade-off between fast time constant and accuracy
)(
)(
2n
en
=ε
)k
n(d)
n(e
)n(
g)
n(
gd
kk
−σµ
+=
+2
21
68
Filtered-X Algorithm
•Objective
–LMS adaptation works best for white noise input
–Track changes in the feedback path
–Prevent response to sinusoidal inputs
•Approach
–Goal is to decorrelate
(whiten) the inputs to the LMS
cross-correlation
–Filter inputs to remove sinusoids
–Fixed filter based on average signal spectrum
–Adaptive filter to detect and remove sinusoids
69
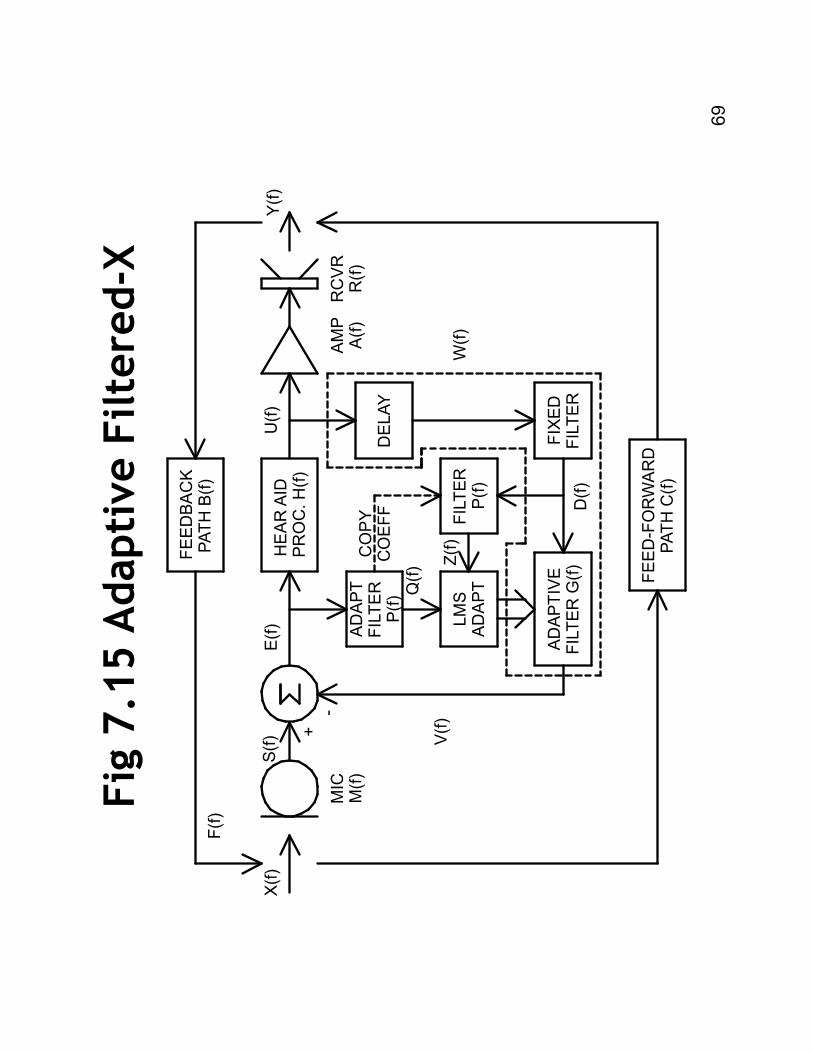
Fig 7.15 Adaptive Filtered-X
FE
ED
BA
CK
PATH
B(f)
HE
AR
AID
P
RO
C. H
(f)
DE
LAY
AD
APT
FIL
TE
RP
(f)
FIL
TER
P(f)
LM
SA
DA
PT
FIX
ED
FIL
TER
AD
AP
TIV
EFIL
TER
G(f)
+-
D(f)
X(f)
Y(f)
E(f)
S(f) V(f)
MIC
M(f)
AM
PA
(f)
RC
VR
R(f)
Q(f) Z
(f)
U(f)
FE
ED
-FO
RW
AR
DPATH
C(f)
F(f)
CO
PY
CO
EFF
W(f)
70
Feedback Conclusions
•Feedback cancellation
–Model the feedback path
–Subtract model output from microphone signal
–LMS adaptive filter update
–Filtered-X approach most effective
•Processing effectiveness
–Generally get 10 -15 dB headroom increase
–Increased gain gives increased audibility
–Increased stability improves sound quality
•Problems remain
–LMS tries to cancel tones and narrowband inputs
–Reverberation
–Clients don't like initialization probe signal
–Linear model affected by distortion (e.g. power aids)
Microphones and Arrays
72
Omnidirectional Microphone
•Single Surface
–Measure pressure at a point in space
–Proportional to membrane displacement
•Microphone Technology
–Moving coil
–Electret
–Silicon
73
Directional Microphone
•Measure pressure at two nearby points
–Pressure difference
–Proportional to velocity
•Implementation
–Pressure difference across a single membrane
–Difference between adjacent omnidirectional mics
•Control the directional pattern
–Microphone separation
–Time delay of rear microphone
–Relative amplitude of rear microphone
74
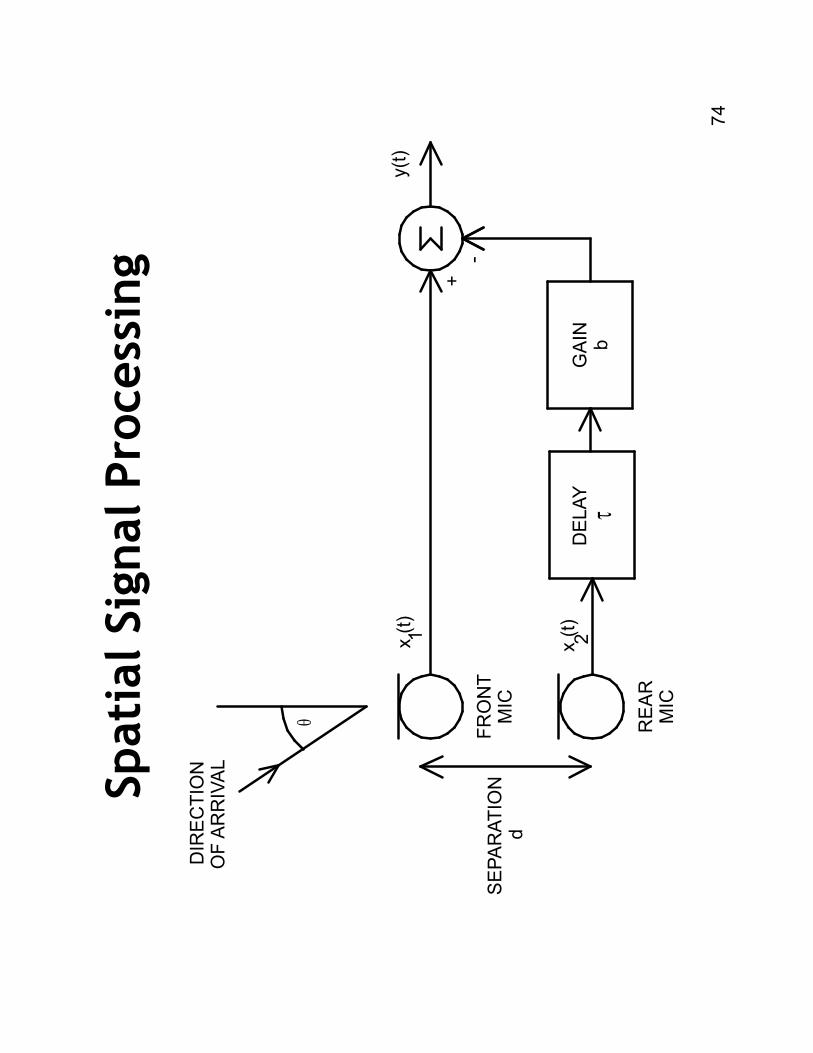
Spatial Signal Processing
DELAY
FR
ON
TM
IC
RE
AR
MIC
SE
PA
RATIO
Nd
+-
x (t)
x (t)
y(t)
1 2
θ
DIR
EC
TIO
NO
F A
RR
IVA
L
τG
AIN
b
75
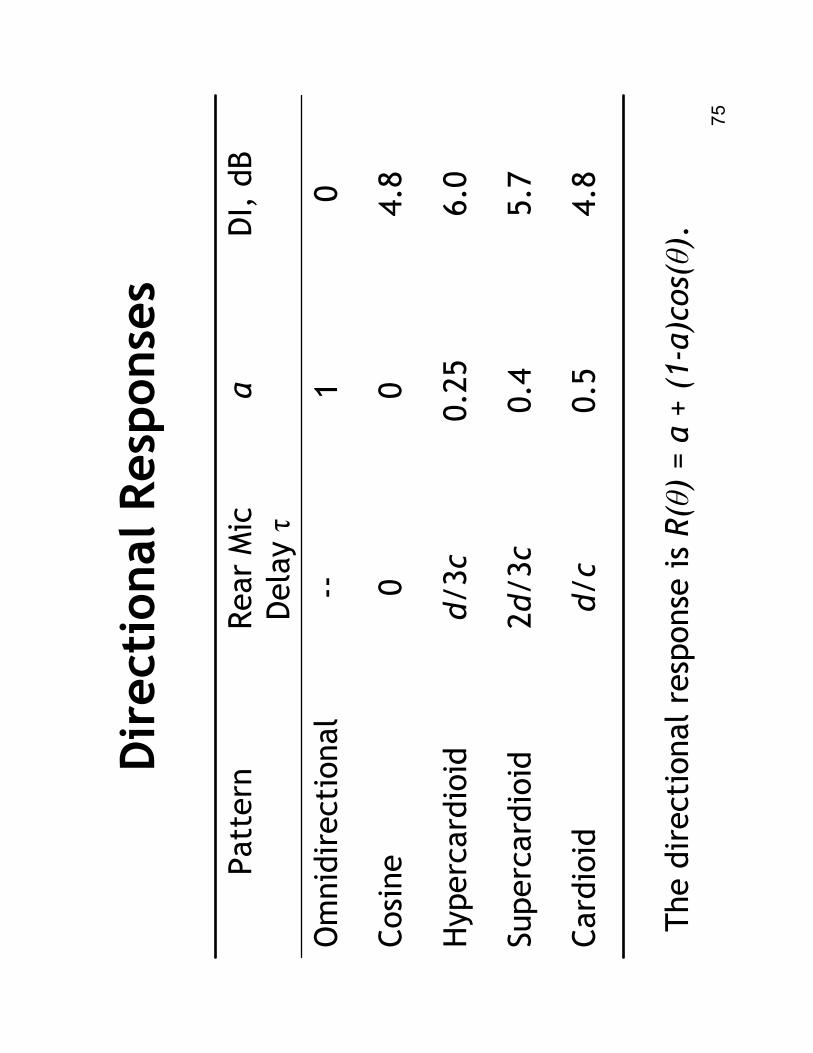
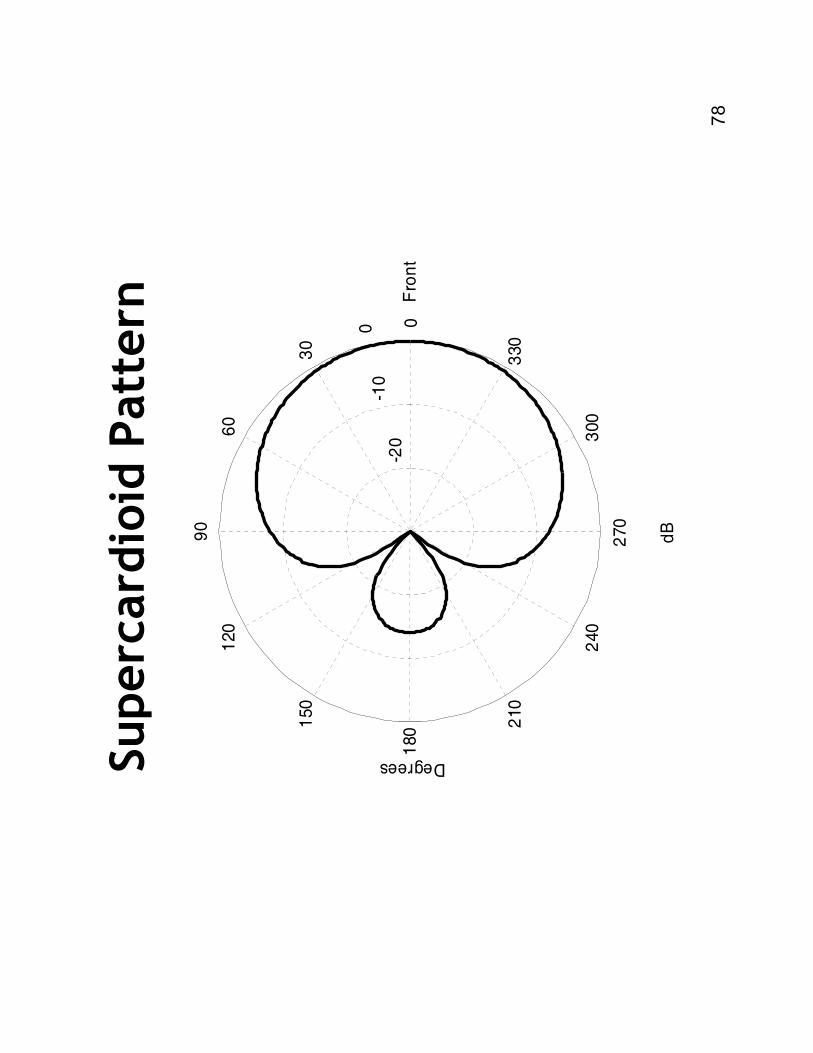
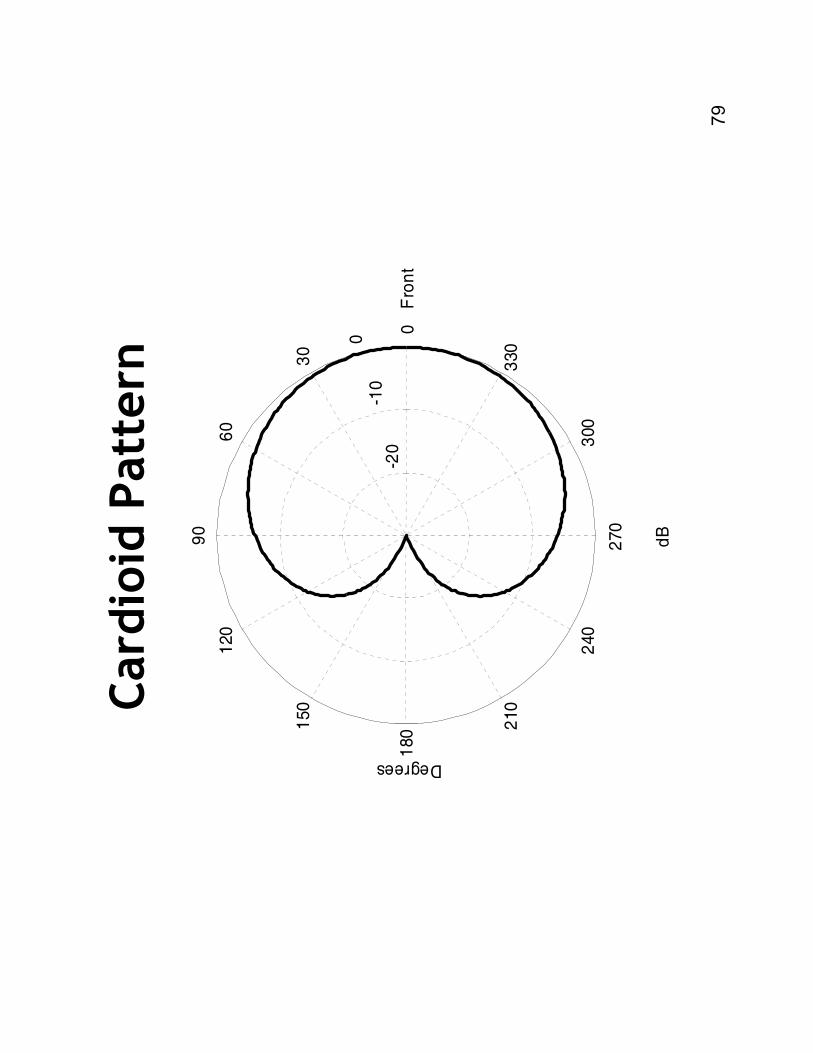
Directional Responses
The directional response is R(θ) = a + (1-a)cos(θ).
4.8
0.5
d/c
Cardioid
5.7
0.4
2d/3c
Supercardioid
6.0
0.25
d/3c
Hypercardioid
4.8
00
Cosine
01
--Omnidirectional
DI, dB
aRear Mic
Delay τ
Pattern
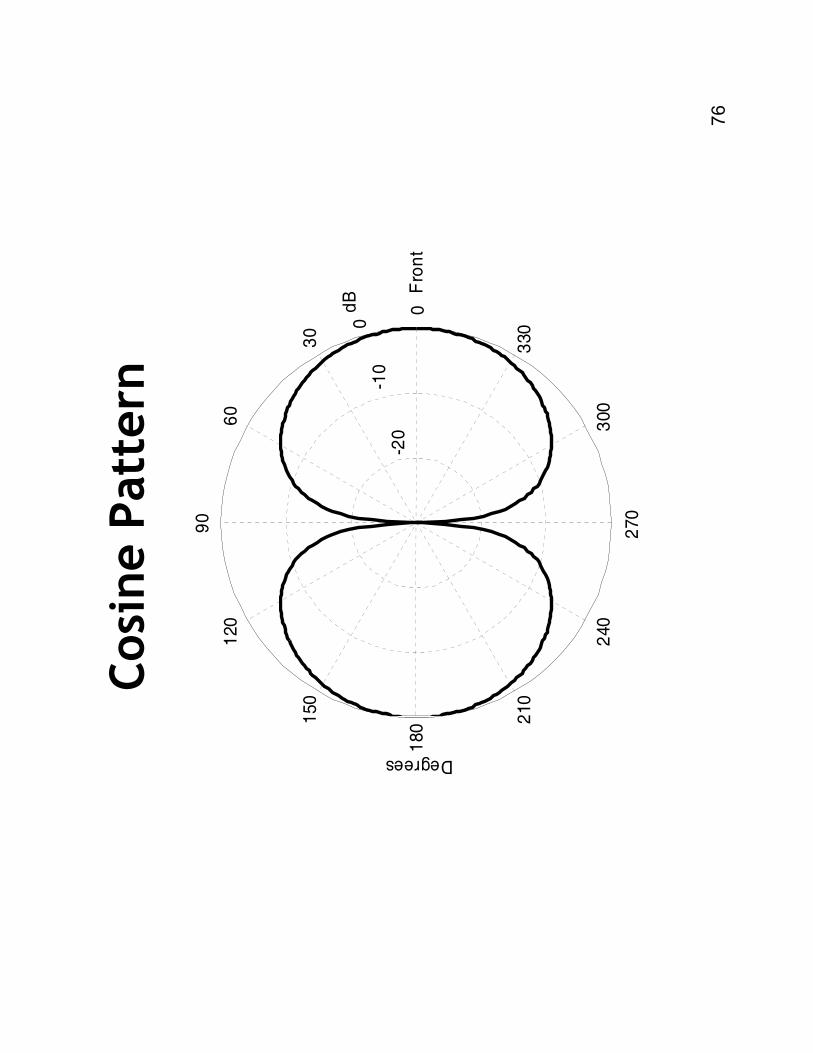
76
Cosine Pattern
-2
0
-10
0
30
210
60
240
90
270
120
300
150
330
180
0
Degrees
Fro
nt
dB
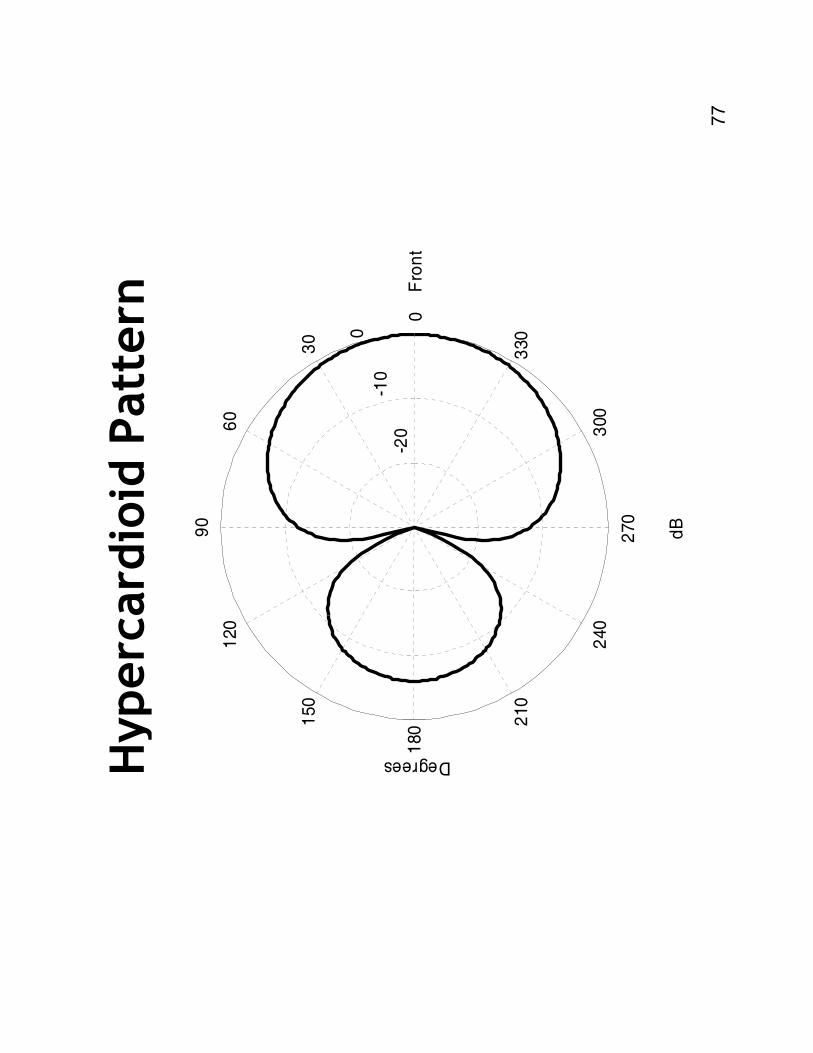
77
Hypercardioid
Pattern
-2
0
-10
0
30
210
60
240
90
270
120
300
150
330
180
0
dB
Degrees
Fro
nt
78
Supercardioid
Pattern
-2
0
-10
0
30
210
60
240
90
270
120
300
150
330
180
0
dB
Degrees
Fro
nt
79
Cardioid
Pattern
-2
0
-10
0
30
210
60
240
90
270
120
300
150
330
180
0
dB
Degrees
Fro
nt
80
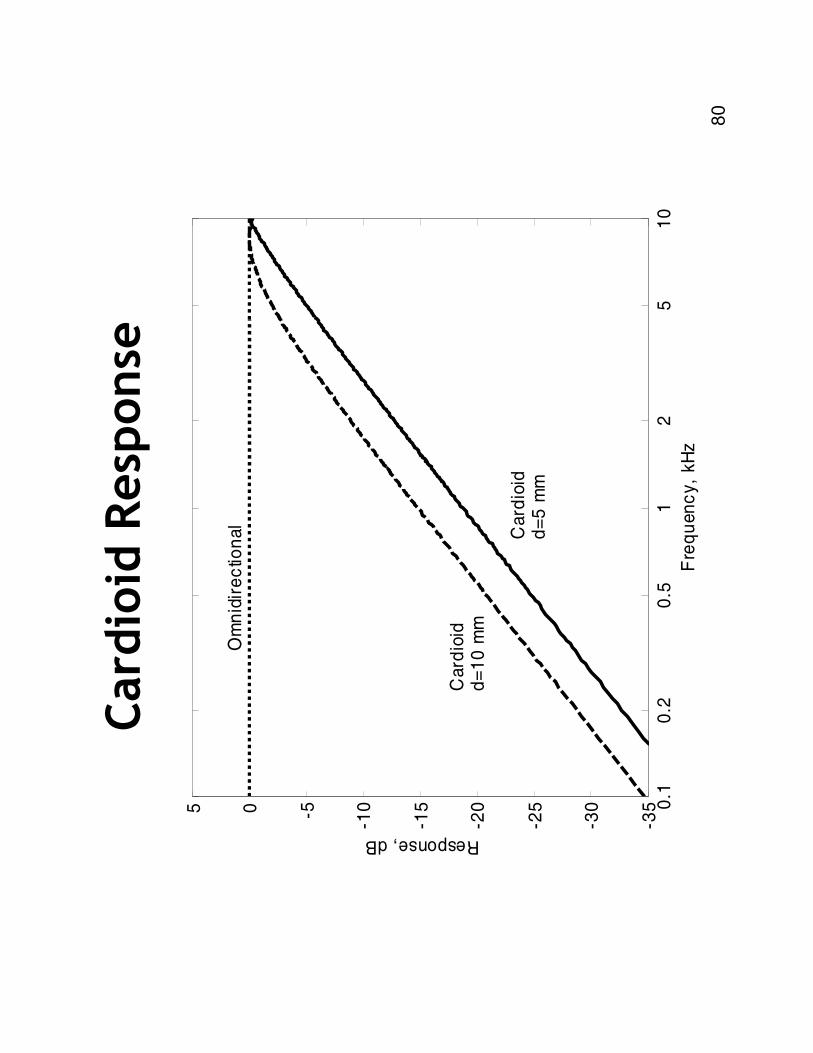
Cardioid
Response
0.1
0.2
0.5
12
51
0-3
5
-30
-25
-20
-15
-10-505
Fre
qu
en
cy,
kH
z
Response, dB
Om
nid
ire
ctio
nal
Card
ioid
d=
10
mm
Card
ioid
d=
5 m
m
81
Adaptive Microphone Arrays
•Start with 2 microphones
–Extension of directional microphone technology
–Can be built into hearing-aid case
•Multi-microphone arrays
–Combine outputs from multiple microphones
–Improved directivity (DI) compared to 2-mic array
–Fixed combination of outputs
–Adaptive combination of outputs
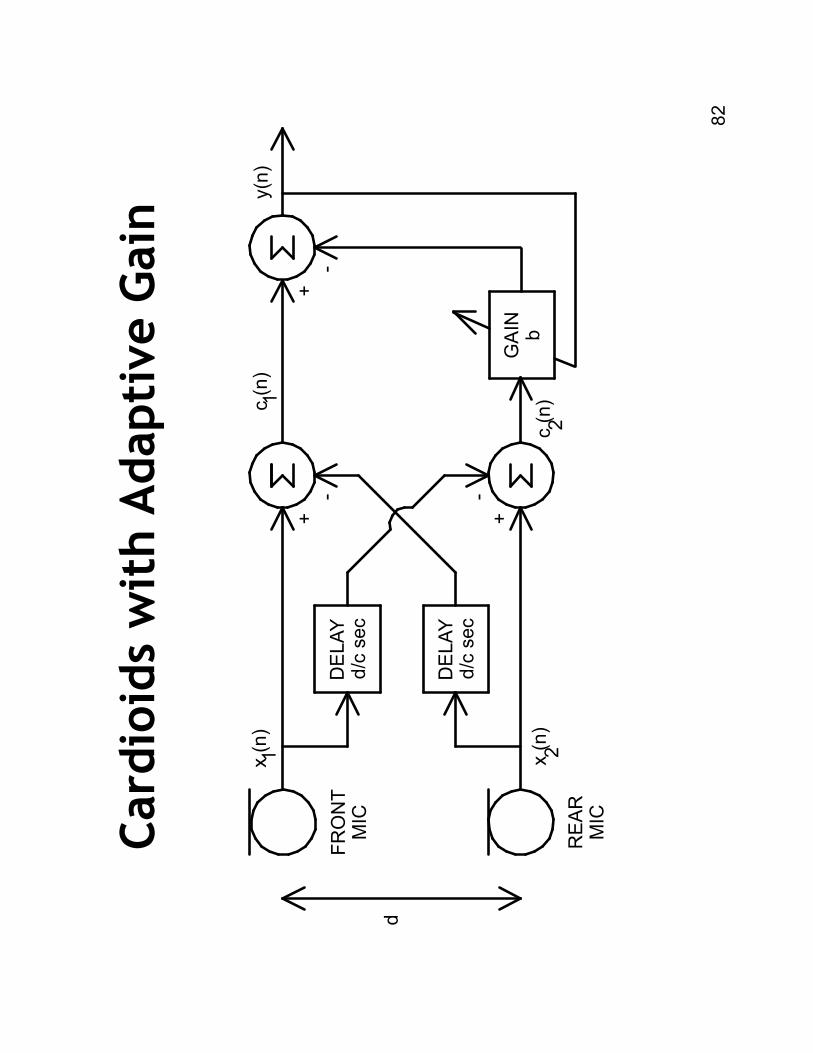
82
Cardioids with Adaptive Gain
FR
ON
TM
IC
REA
RM
IC
GA
INb
x (n)
x (n)
1 2
+-
y(n
)
+- -
+
DE
LAY
d/c
sec
DE
LAY
d/c
sec
c (n)
1
c (n)
2
d
83
Adaptive Gain
•Combine micsto give cardioidresponses
–One response faces forward, null at 180 deg
–Second response faces rear, null at 0 deg
•Cardioidoutputs and c2(n)
–Also give directional patterns
–Front output c 1(n) primarily desired signal
–Rear output c 2(n) primarily interference
c 1(n)
)]cos(
1[21
)(1
θθ
+=
c)]
cos(
1[21
)(2
θθ
−=
c
84
Combined Cardioid
Outputs
•Sum cardioidsignals:
•Sum directional patterns:
•Null direction depends on b
–Set b=0: front cardioidpattern
–Set b=1: cosine pattern
•Adjust 0 ≤
b≤1 to steer null 180 to 90 deg
)(
)(
)(
21
nbc
nc
ny
−=
)(
)(
1n
cn
y=
)(
)(
)(
21
nc
nc
ny
−=
)(
)(
)(
21
θθ
θbc
cy
−=
)]cos(
1[2/
1)
(θ
θ+
=y
)cos(
)]cos(
1[2/
1)]
cos(
1[2/
1)
()
()
(2
1θ
θθ
θθ
θ=
−−
+=
−=
cc
y
85
LMS Adaptive Update
•Adjust bbased on rear signal and output
•Interference from side
–c 2(n) similar to y(n), interference in both signals
–bis driven towards 1, cancel interference at 90 deg
•Interference from rear
–Average ofc 2(n) times y(n) tends negative
–bis driven negative
–Pattern moves towards forward cardioid)n(y)
n(
c)n(b
)n(b
y
22
1σµ
+=
+
86
Microphone Conclusions
•Summary from Walden et al(2003):
–Directional micstest better than real-world results
–Environment often limits directional benefit
–Benefit should be expected only when the signal
source is in front of and relatively near the listener
and the interference is spatially separated
–Omnidirectional mode should be the default
AdditionalProcessing
Areas
88
Additional Areas, I
•Electro-acoustic interactions
–Head and external ear modify microphone input
–Vent reduces system low-frequency response
–Occlusion effect: own voice louder
•Wind noise
–Wind flow over microphone generates turbulence
–Directional micsespecially sensitive
•Spectral enhancement
–Broader auditory filters reduce spectral contrast
–Modify short-time spectrum to increase contrast
89
Additional Areas, II
•Sound classification
–Change parameters for different environments
–Identify environments to set optimum processing
•Binaural processing
–Link the hearing aids at the two ears
–Low-power short-range communication link
–Synchronize device parameter settings
–Compare signals for compression and noise
suppression
Conclusions
91
Conclusions
•Hearing aid = perceptual engineering
–Designs apply criteria such as MMSE or Max Likelihood
–These criteria ignore perception
–Need to consider the human listener as well
•Problems remain
–Have not solved the basic problem of speech
intelligibility in noise
–Most algorithms are not effective despite having a
strong intuitive appeal
92
•April 2008
•Plu
ral
Publis
hin
g,
San D
iego