Embed Size (px)
Citation preview

Differential Geometry II(15.05.2014)
Dr. Emanuele RodolàMatthias Vestner
{rodola,vestner}@in.tum.deRoom 02.09.058, Informatik IX

Seminar
«The metric approach toshape matching»
Alfonso Ros
Wednesday, May 28th14:00 Room 02.09.023
Overview
• Parametrized surfaces andfirst fundamental form
• Functions defined on surfaces
• Laplace-Beltrami operator• Extension to triangulated
manifolds

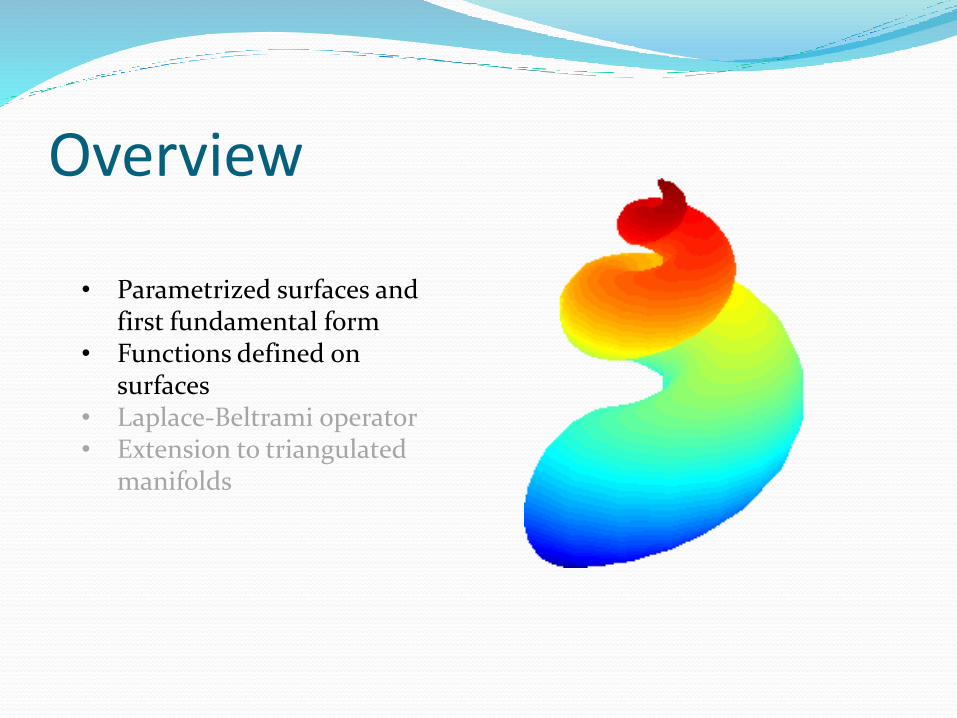
Wrap-upLast time we have introduced the main notions of differential geometrythat we will be using in this course.
In particular, we showed how to model a 3D shape as a regular surface, that is, just a collection of deformed plane patches (called surface elements) glued together so as to form something smooth.

Wrap-upThe general idea of this approach is that we wish to analyze shapes according to a simple recipe:
• Consider each point of the shape as belonging to some surface element.• Each surface element is the image of a known parametrization function x.• Instead of studying the point directly on the surface, we pull it back to the
plane and do our calculations there.
x
y
z
x p
u
v

Wrap-up
x
x
y
z
x p
u
v
z
y
x u
v
p

Wrap-upIn doing so, the are some properties that we naturally expect to be satisfied:
• The local properties of the surface should not depend on the specific choice of a parametrization x.
• Since we want to speak about tangent planes, the parametrization should be differentiable.
• Since we know how to do calculus in , we would like to transfer this knowledge to the study of non-Euclidean domains (the surface).
nR
Wrap-up
u
vx
S
STp
p
)( pq x
p x q
dt
d
pxddt
d
))(),(( tvtu
),( ux
vx
vuw xx
1e
2e
w),(
0|))(),(()( ttvtupq xx
vuvut
t
vudt
dv
vdt
du
utvtu
dt
dq
dt
dw xxxx
xxx
''|))(),(( 0
0
vp
up
p
e
e
w
xx
xx
x
)(d
)(d
)),((d
2
1
pxd

First fundamental formWe introduced the notion of first fundamental form on a regular surface as the quadratic function given byR)(: STI pp
2,)),(( wwwI p
which, given a vector w in the tangent plane at p, simply computes its length.
In fact, we can generalize this function to take two arguments as follows:
),(),,()),(),,(( pI
The first fundamental form is a tool we use to compute angles and lengths on the surface (and we actually found out we can also use it to compute areas).
R )()(: STSTI ppp

First fundamental form
GF
FEI vuvup xxxx ,)),((
uuE xx , vuF xx , vvG xx , g«metric tensor»
GF
FEI vuvup xxxx ,)),(),,((
The first fundamental form can be conveniently rewritten as:
Or, in case we regard it as the more general bilinear form, as:

The confusing exampleConsider a plane passing through and containing the orthonormal vectors and
3RS 0q
1~w .~
2w
210~~),(~ wvwuqvu x
We want to compute the first fundamental form for an arbitrary point q in S.
0qS
2~wx~
q
2
1
~~
~~
w
w
v
u
x
x
p
)~
,~(
vuw xx ~~~~
10
01~g
Euclidean metric tensor
w
~~
Thus, the first fundamental form of w at p is 22 ~~~
~
10
01~~))~
,~((
pI
1e
2e
px~d
1~w

Example 2 (plane)Consider the previous example, but this time let andWe are changing the parametrization x, but still we expect that the lengths of vectors in do not change (as they are a property of the surface).
As before, we have , and then .21, ww vu xx
40
01g
11 w .22 w
)(STp
x
vuw xx ~~~~
Say, for example, that we take the same (p,w) from the previous example.
vuw xx
previous example:
this example:
The two bases, and thus the coefficients for w are different in the two examples.
We can now compute 22 ~~
2
~~
40
01
2
~~
40
01)),((
pI
pxdvuvu xxxx ~~~~
!
p
),(
1e
2e
0qS
2w
q
w
1w

Example 3 (plane)Let’s make it more interesting and let andAgain, we expect that the length of w does not change.
,11 w ,12 w .2
1, 21 ww
Once again, we have , and now .21, ww vu xx
12/1
2/11g
Even though the metric tensor g is different, again we expect the first fundamental form to be the same as before.
21
!
21~~~~ wwww
0qS
x w
pxd
p
),(
1e
2e
2w
1w
q )~~(2
1,~
21211 wwwww
~
2,~~
So we get 22 ~~~
2
~~
12/1
2/11~2
~~
12/1
2/11)),((
pI

Example 4 (cylinder)
We notice that the plane and the cylinder behave locally in the same way, since their first fundamental forms are equal.
In other words, plane and cylinder are locally isometric. However, the isometry cannot be extended to the entire cylinder because the cylinder is not even homeomorphic to a plane.
),sin,(cos),( vuuvu x
},20;),{( 2 vuvuU R
)1,0,0(,)0,cos,sin( vu uu xx
1
0
1cossin 22
G
F
uuE
vx
qux
10
01g

Example 5a (sphere)
From this example it becomes evident that the coefficients E, F, G are indeed differentiable functions E(u,v), F(u,v), G(u,v).
Thus, if is the tangent vector to the sphere at point x(u,v), then its squared length is given by .

Example 5b (sphere)
The result is probably going to look not very nice.
In general, from a computational point of view it is much more convenient to plug in the values for directly in , and only then compute g.

in the sense that we identify the vector by its coefficients in the proper basis:
Notation
In the following, in order to simplify things we will commit a slight abuse of notation and write:
)( pp x that is, we identify a point on the surface by its pre-image in the parameter domain
p
p
x
),( w
21 bb
1
0,
0
121 bb
vu bb xx 21 ,
:2R
:3R

Function on a surfaceConsider a surface S with parametrization
and a differentiable function
We want to define the gradientat a point .
pAgain this property should beindependent of theparametrization

The gradient in R2
The gradient of a differentiable function is the vector field
p u
v

The gradient on a reg. surface
Let now be a differentiablefunction.Ideas how to define :
• Use the same formula asbefore, but in terms of x,y,z:
p
No information about f outside of S!

The gradient on a reg. surface
Let now be a differentiablefunction.Ideas how to define :
p• Write f in terms of a parametrization:and set
p u
v
Depends on the choice ofthe parametrization!

The gradient on a reg. surface
Let now be a differentiablefunction.Ideas how to define :
• Interpret the geometricmeaning of the gradient p u
v
the vector that points in thedirection of steepest increaseof f
its length measures thedegree of increase
directional derivative:

The gradient in on a reg. surface
p
DefinitionThe gradient is defined via
where

The gradient in local coordinates
Since the gradient is a member of TpSwe should be able to find coefficients f1, f2 such that
These coefficients will depend on thegradient of
p u
v

An example
Consider the functionthat assigns to each point on theunitsphere its distance to the north pole n:

An example
u
v

An example u
v

An example
u
v

The gradient in local coordinates
p
Let us first write
which is the change of f in direction xu
Aim:calculate the coefficients of
p u
v

The gradient in local coordinatesLet now
p
On the other hand
The linearity of dfp yields
This means

First parametrization
u
v

Second parametrization

Gradient on a triangle
u
v

Application of the gradientSegmentation based on texture:
Main idea: Consider the norm of the gradient

Suggested reading Differential geometry of curves and surfaces. Do
Carmo – Chapters 2.5, Appendix 2.B
Differential Geometry: Curves – Surfaces – Manifolds. W. Kühnel – Chapter 3A