Embed Size (px)
Citation preview
�
24th American Control Conference
June 8-10, 2005
Diesel Engines
� Offer superior fuel economy, albeit at higher cost and complexity of the aftertreatment system
� Achieved remarkable passenger car market penetration in Europe and growing presence in North America� Thanks to advances in technology and controls, diesel engines
are no longer sluggish nor spewing clouds of black smoke
� Used also in commercial heavy vehicles, off-road, construction, marine and power generation applications� Constitute more than 90 percent of “prime movers”
�
24th American Control Conference
June 8-10, 2005
Modern Diesel Engines
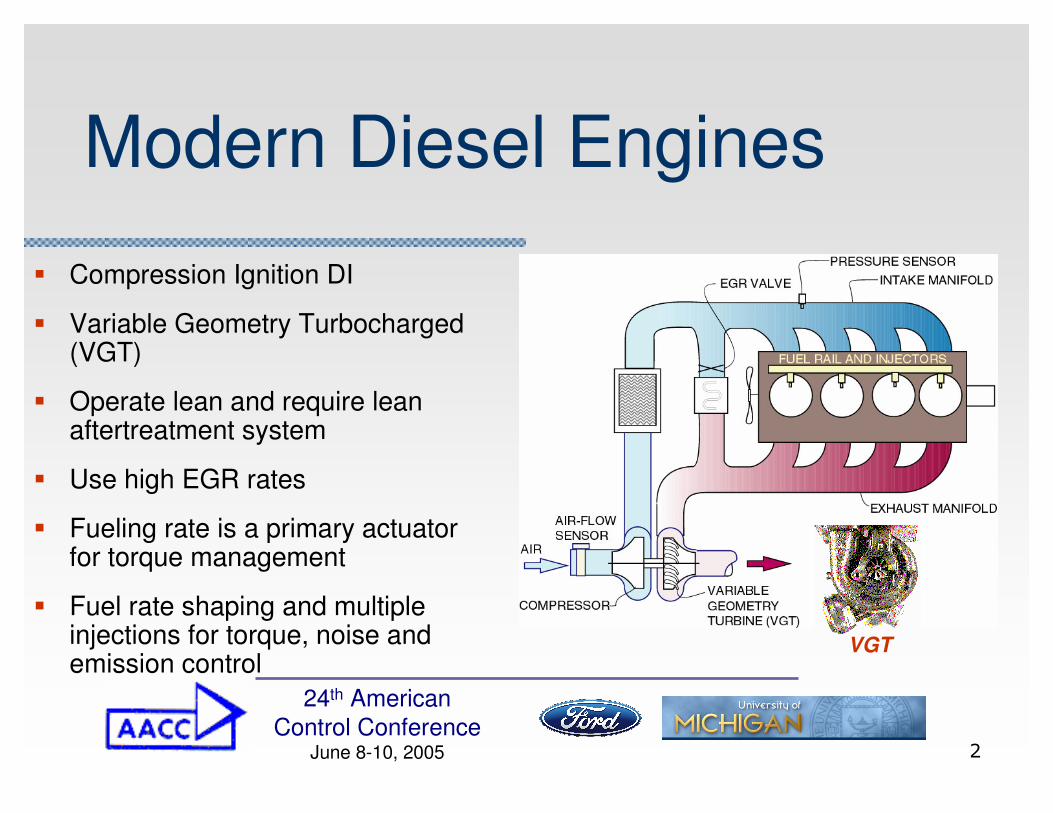
� Compression Ignition DI
� Variable Geometry Turbocharged (VGT)
� Operate lean and require lean aftertreatment system
� Use high EGR rates
� Fueling rate is a primary actuator for torque management
� Fuel rate shaping and multiple injections for torque, noise and emission control
VGT
�
24th American Control Conference
June 8-10, 2005
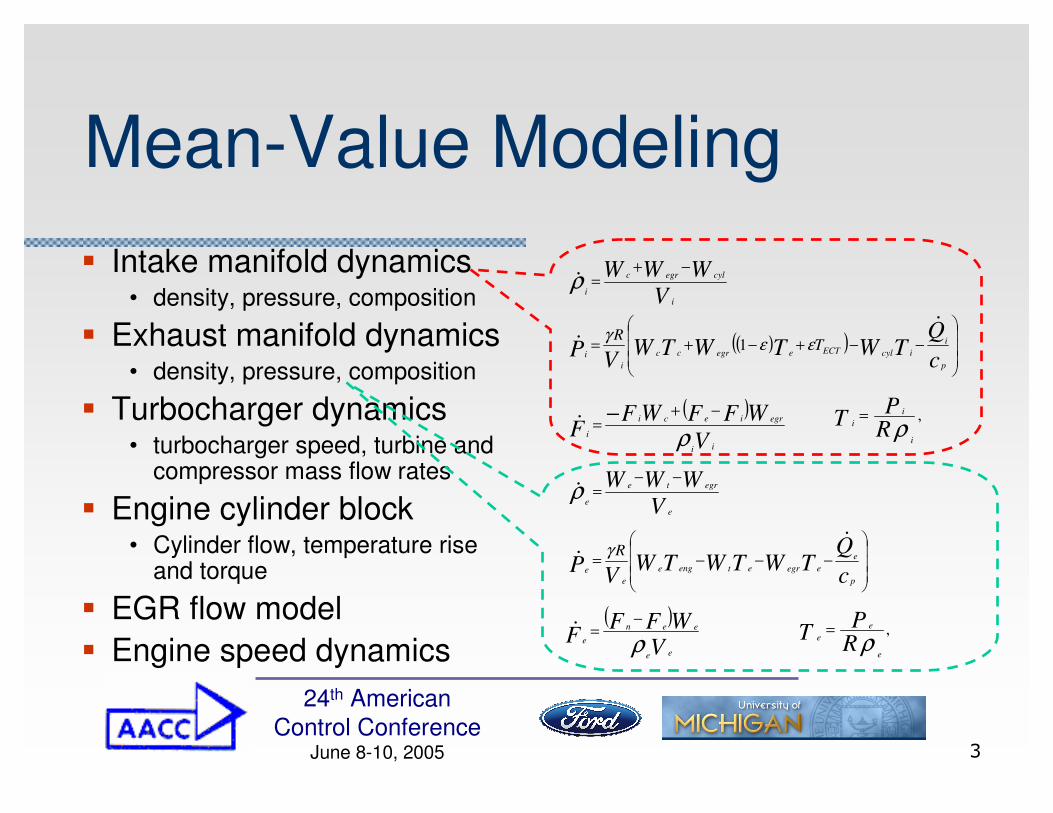
Mean-Value Modeling� Intake manifold dynamics
• density, pressure, composition
� Exhaust manifold dynamics• density, pressure, composition
� Turbocharger dynamics• turbocharger speed, turbine and
compressor mass flow rates
� Engine cylinder block • Cylinder flow, temperature rise
and torque
� EGR flow model� Engine speed dynamics
VWWW
i
cylegrc
i
−+=ρ�
( )( )���
�
�
���
�
�
−−+−+=cQ
TWTWTWVPp
iicylECTeegrcc
ii
TR �
� εεγ1
,ρRPT
i
ii=( )
VWFFWF
Fii
egrieci
i ρ−+
= −�
VWWW
e
egrte
e
−−=ρ�
( )V
WFFFee
eene ρ
−=�
���
�
�
���
�
�
−−−=cQ
TWTWTWVPp
eeegretenge
ee
R ��
γ
,ρRPT
e
ee
=
�
24th American Control Conference
June 8-10, 2005
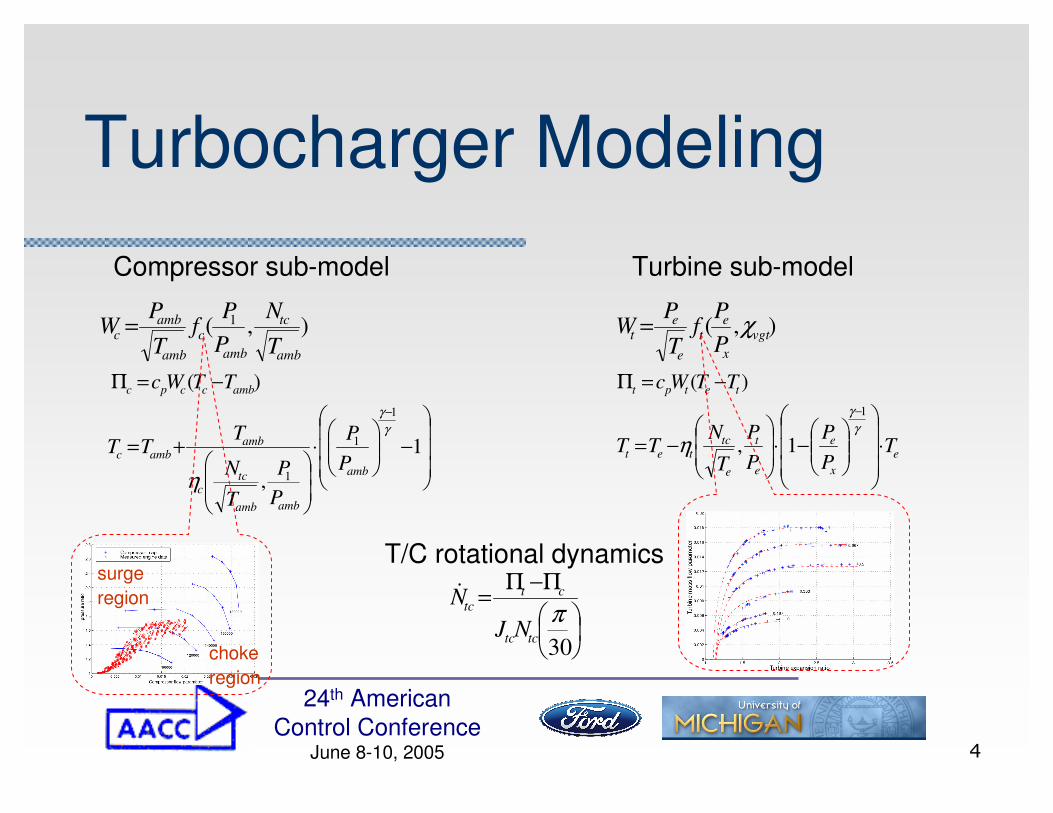
Turbocharger ModelingTurbine sub-model
),( vgtx
et
e
et P
Pf
TP
W χ=
)( tetpt TTWc −=Π
Compressor sub-model
T/C rotational dynamics
ex
e
e
t
e
tctet T
PP
PP
TN
TT ⋅���
�
�
���
�
�
���
����
�−⋅
��
�
�
��
�
�−=
−γ
γ
η
1
1,
),( 1
amb
tc
ambc
amb
ambc
TN
PP
fTP
W =
)( ambccpc TTWc −=Π
���
�
�
���
�
�
−���
����
�⋅
��
�
�
��
�
�+=
−
1
,
1
1
1
γγ
η amb
ambamb
tcc
ambambc P
P
PP
TN
TTT
��
���
�
Π−Π=
30π
tctc
cttc
NJN�
surge region
choke region
�
24th American Control Conference
June 8-10, 2005
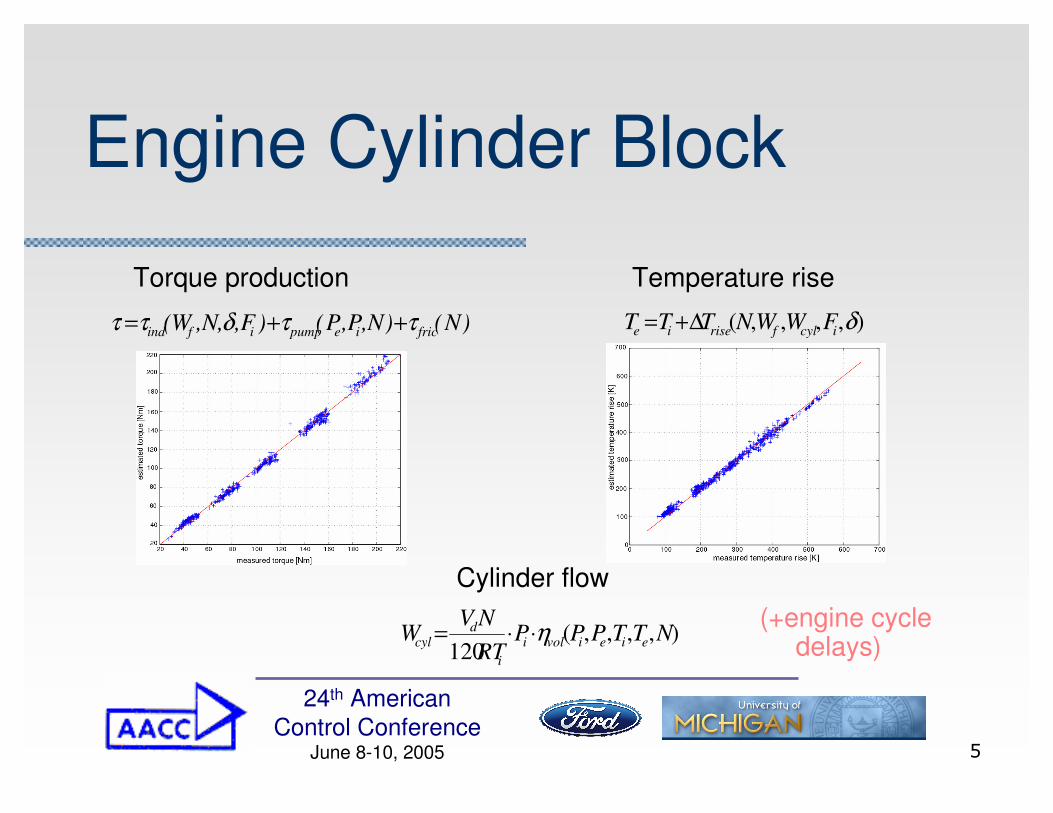
Engine Cylinder Block
Torque production Temperature rise
Cylinder flow
)N()N,P,P()F,,N,W( friciepumpifind ττδττ ++= ),,,,( δicylfriseie FWWNTTT ∆+=
),,,,(120
NTTPPPRTNV
W eieivolii
dcyl η⋅⋅= (+engine cycle
delays)
�
24th American Control Conference
June 8-10, 2005
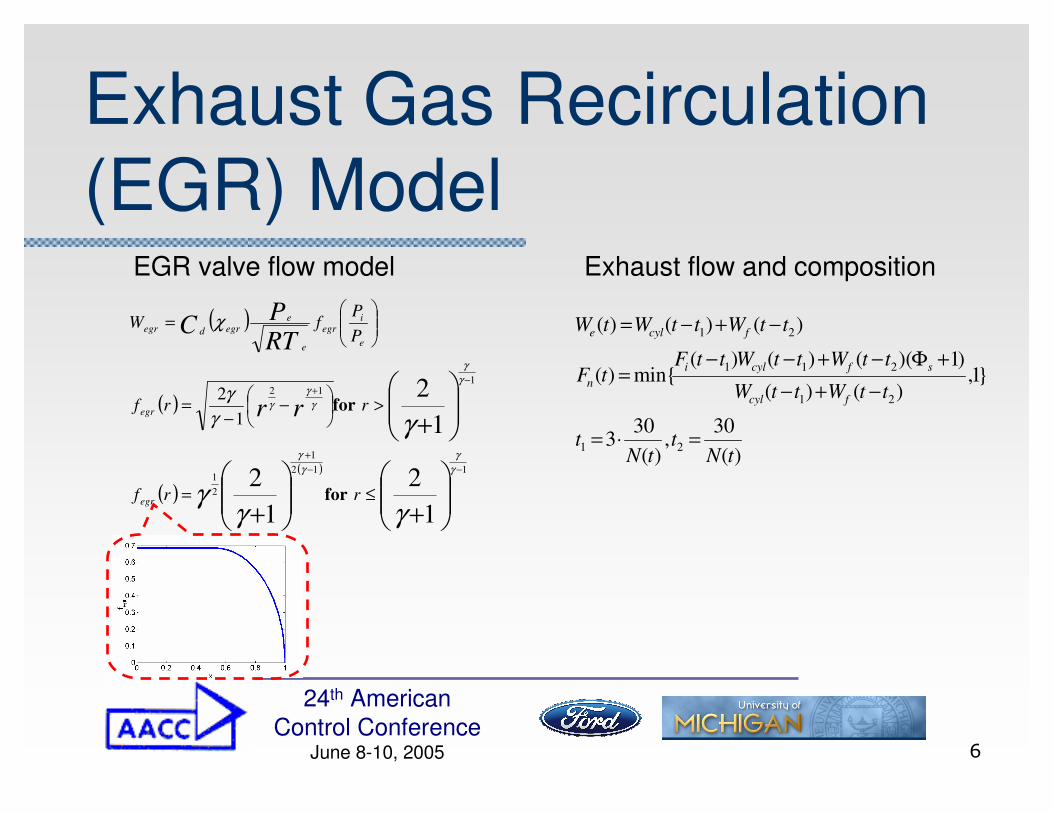
Exhaust Gas Recirculation(EGR) Model
EGR valve flow model Exhaust flow and composition
)(30
,)(
303
}1,)()(
)1)(()()(min{)(
)()()(
21
21
211
21
tNt
tNt
ttWttW
ttWttWttFtF
ttWttWtW
fcyl
sfcylin
fcyle
=⋅=
−+−+Φ−+−−
=
−+−=( )
( )
( )( )
���
����
�
+���
����
�
+
���
����
�
+−−
+
−+
≤=
>��
���
� −−
=
���
����
�=
12
12
12
1121
21
112
12
γγγ
γγγ
γγ
γγ
γγ
γγ
γ
χ
rrf
rrf
PP
fW
egr
egr
e
iegr
e
eegrdegr
rr
RTPC
for
for
�
24th American Control Conference
June 8-10, 2005
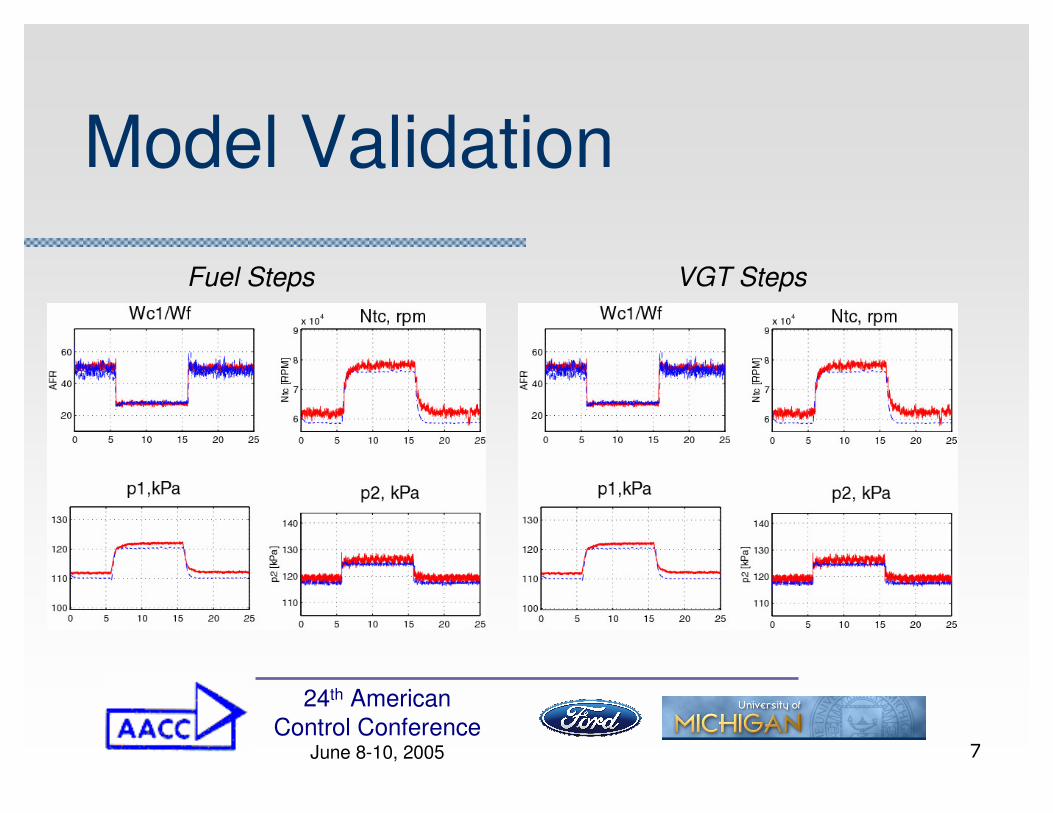
Model Validation
Fuel Steps VGT Steps
�
24th American Control Conference
June 8-10, 2005
Diesel Model Summary
� Higher order than for gasoline engines� Contains significant nonlinearities� Contains delays � Using physics-based characterizations is advantageous� Sub-models becomes parts of the control strategy� Analysis goals may necessitate additional modeling
� Crank angle resolved cylinder-by-cylinder behavior� Uncertainties due to part-to-part variability, aging, operating
conditions� Aftertreatment system
24th American Control Conference
June 8-10, 2005
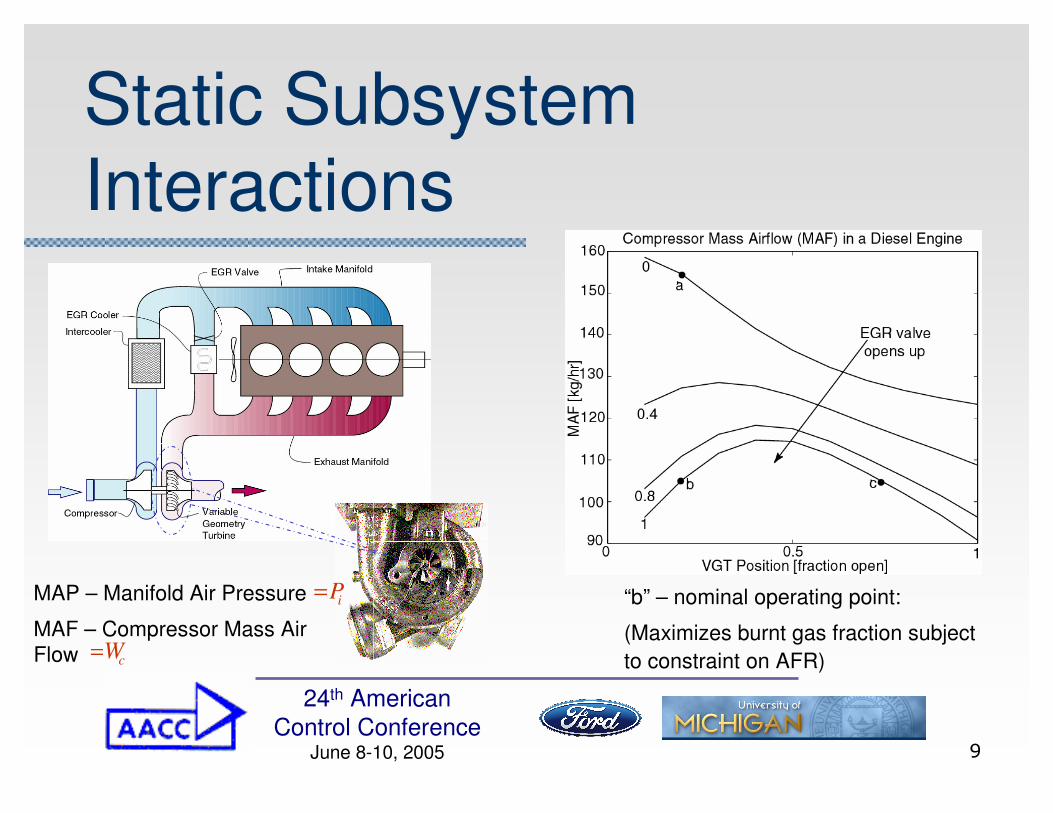
Static Subsystem Interactions
MAP – Manifold Air Pressure
MAF – Compressor Mass Air Flow
“b” – nominal operating point:
(Maximizes burnt gas fraction subject to constraint on AFR)
iP=
cW=
�
24th American Control Conference
June 8-10, 2005
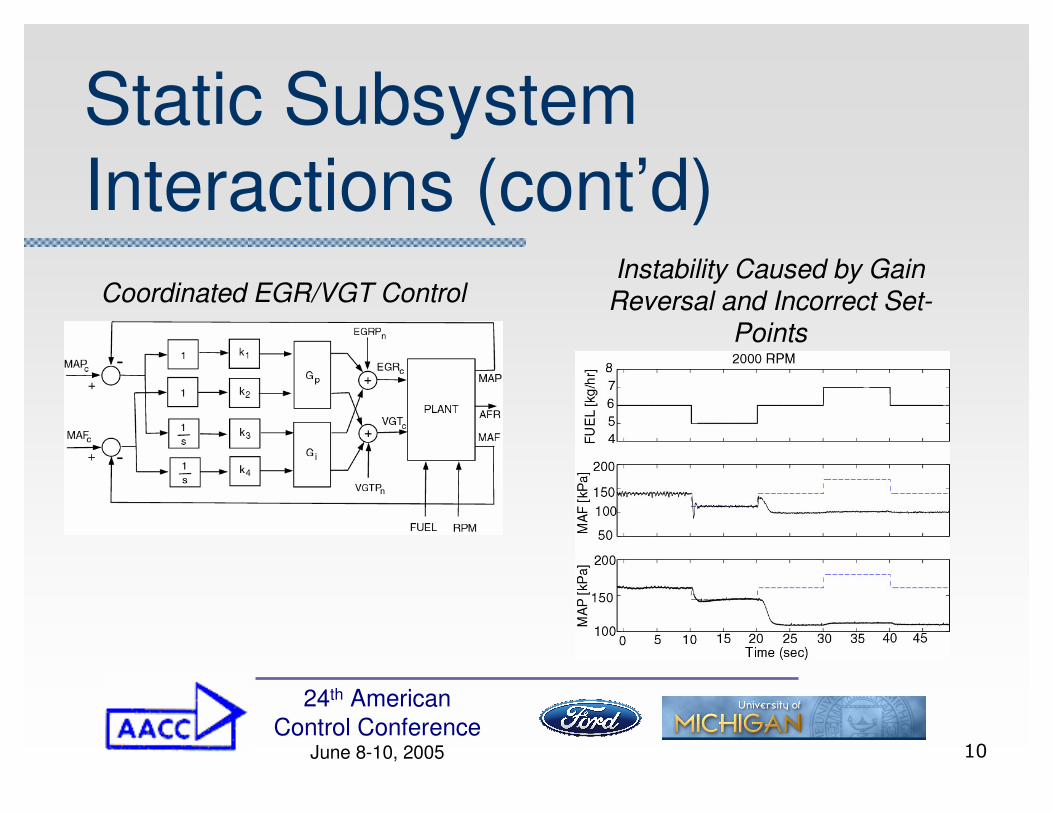
Static Subsystem Interactions (cont’d)
Coordinated EGR/VGT ControlInstability Caused by Gain Reversal and Incorrect Set-
Points
��
24th American Control Conference
June 8-10, 2005
Dynamic Interactions
� Engine dynamics become slower with EGR valve opening
� Non-minimum phase behavior for a usual selection of outputs
� Non-intuitive optimal transient VGT operating strategies
� Decentralized architecture for EGR/VGT control may not be optimal in transients
��
24th American Control Conference
June 8-10, 2005
Sensor and Controller Configuration Selection
� Steady-state sensitivity to uncertainties� Relative degree & non-minimum phase behavior
considerations� Relative Gain Array (RGA)� Optimal control� I/O Screening� µ analysis� Feedback architecture interplay with the need to
operate at steady-state optimal set-points
��
24th American Control Conference
June 8-10, 2005
Coordinated EGR/VGT Control Approaches
� Linear gain scheduled and gain switching control
� Nonlinear Lyapunov-based control� Feedback passivation� Sliding mode control� Model predictive control� Feedback on estimates� Adaptation
��
24th American Control Conference
June 8-10, 2005
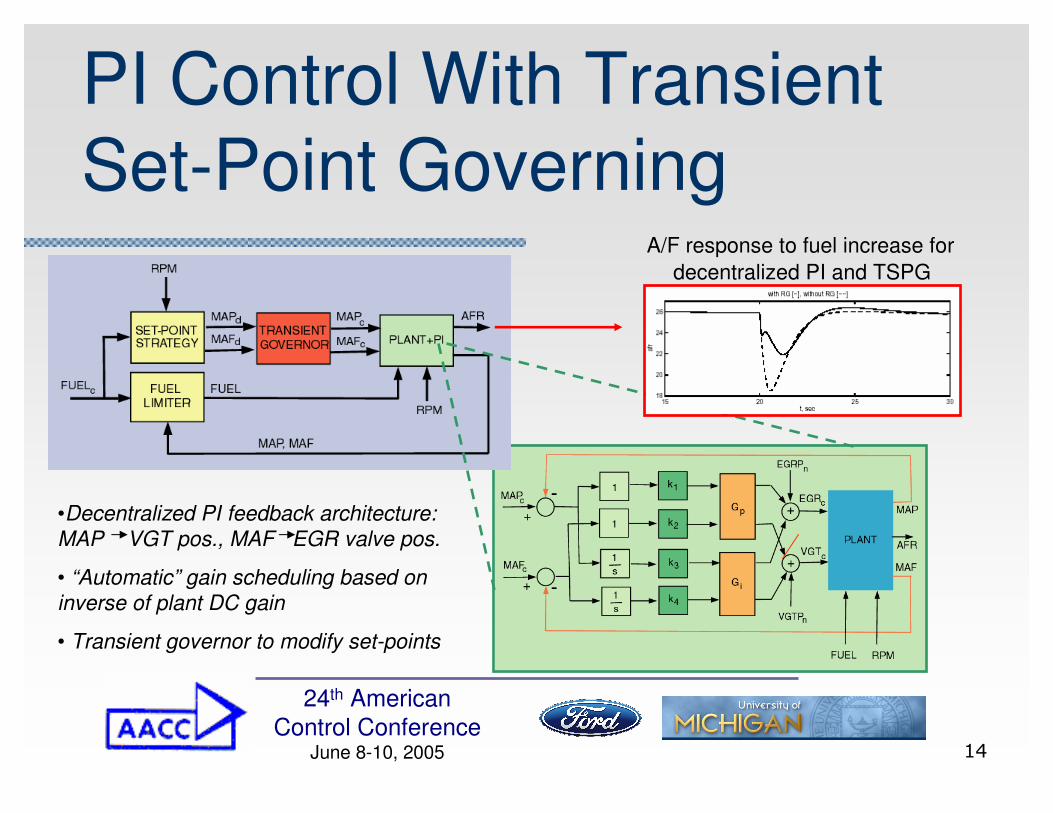
PI Control With Transient Set-Point Governing
A/F response to fuel increase for decentralized PI and TSPG
•Decentralized PI feedback architecture: MAP VGT pos., MAF EGR valve pos.
• “Automatic” gain scheduling based on inverse of plant DC gain
• Transient governor to modify set-points
��
24th American Control Conference
June 8-10, 2005
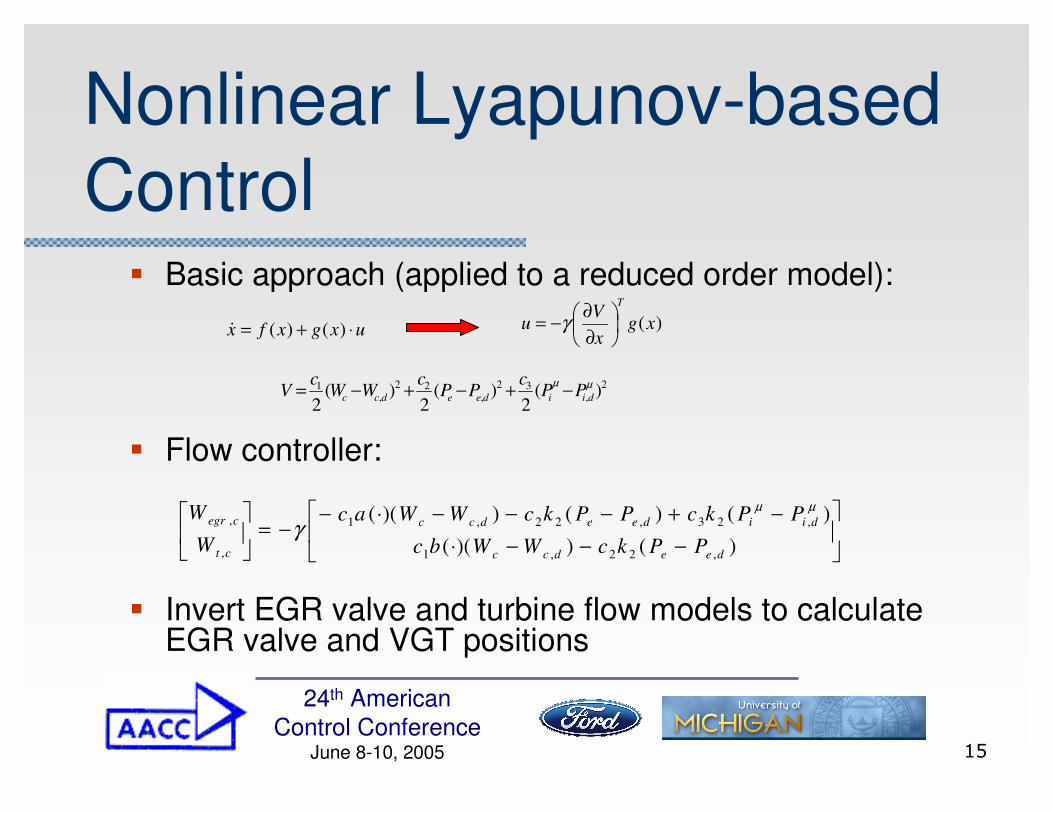
Nonlinear Lyapunov-based Control
2,
32,
22,
1 )(2
)(2
)(2
µµdiideedcc PP
cPP
cWW
cV −+−+−=
uxgxfx ⋅+= )()(� )(xgxV
uT
��
���
�
∂∂−= γ
� Basic approach (applied to a reduced order model):
��
�
�
−−−⋅−+−−−⋅−
−=��
�
�
)())(()()())((
,22,1
,23,22,1
,
,
deedcc
diideedcc
ct
cegr
PPkcWWbc
PPkcPPkcWWacW
W µµ
γ
� Flow controller:
� Invert EGR valve and turbine flow models to calculate EGR valve and VGT positions
��
24th American Control Conference
June 8-10, 2005
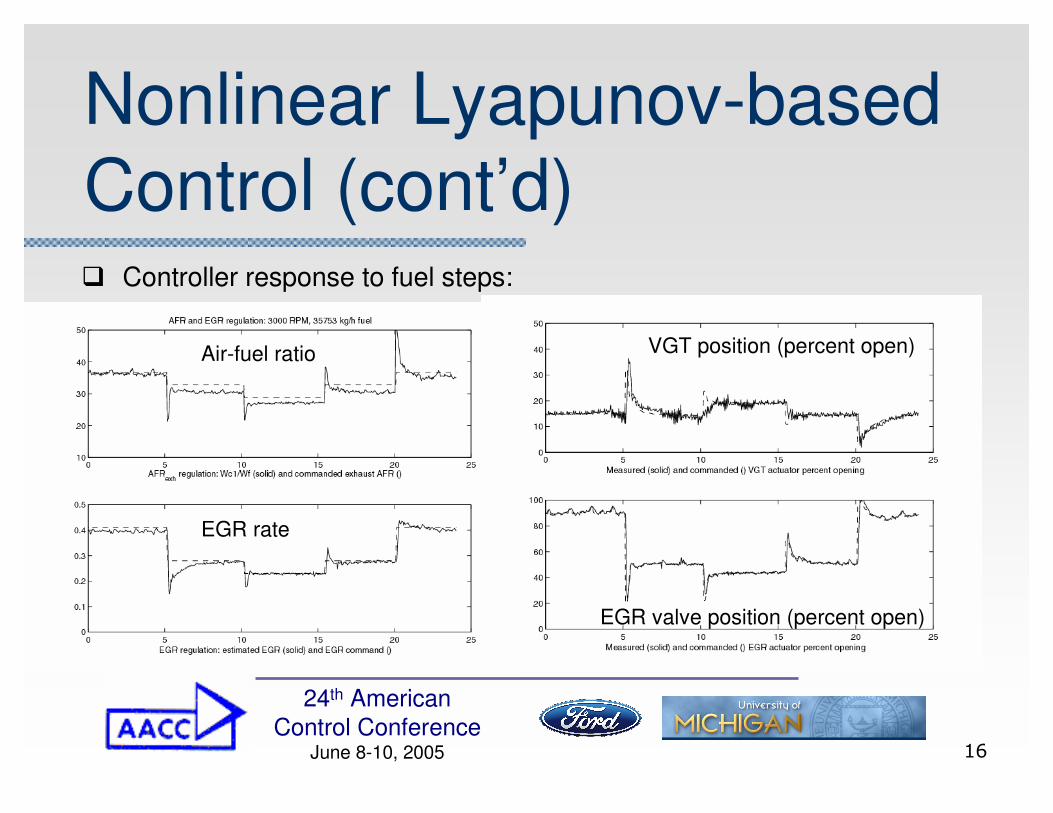
Nonlinear Lyapunov-based Control (cont’d)� Controller response to fuel steps:
Air-fuel ratio
EGR rate
VGT position (percent open)
EGR valve position (percent open)
��
24th American Control Conference
June 8-10, 2005
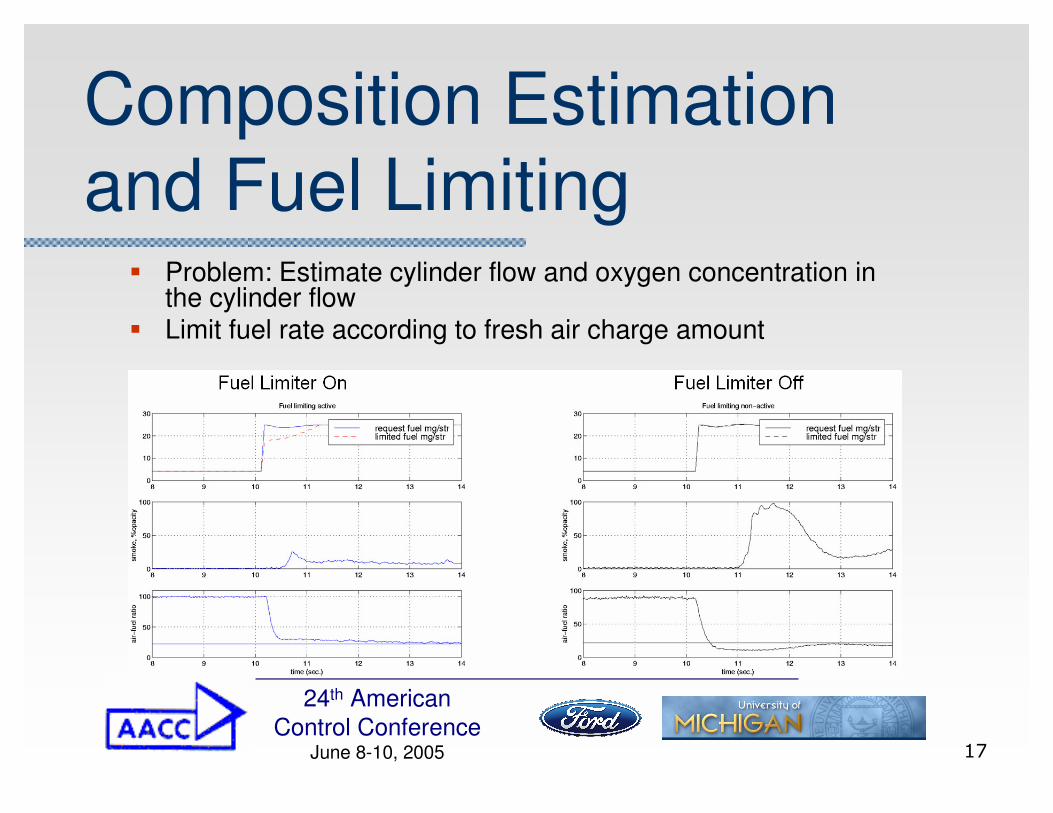
Composition Estimation and Fuel Limiting
� Problem: Estimate cylinder flow and oxygen concentration in the cylinder flow
� Limit fuel rate according to fresh air charge amount
��
24th American Control Conference
June 8-10, 2005
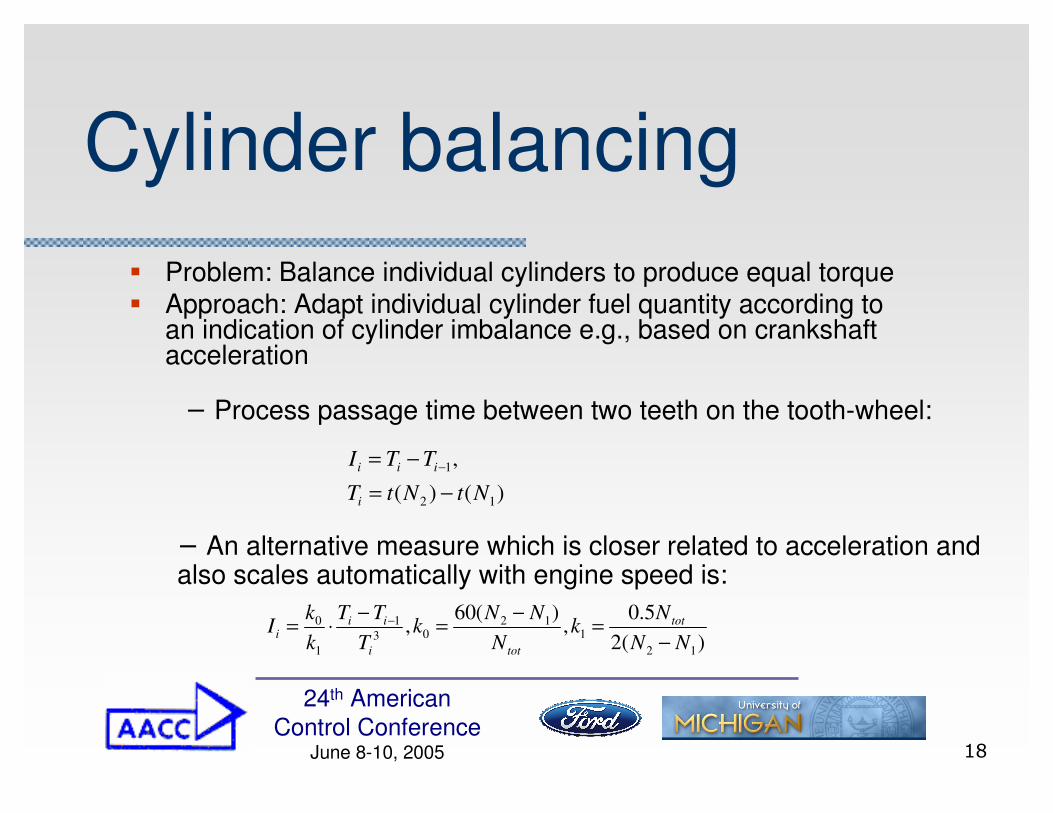
Cylinder balancing� Problem: Balance individual cylinders to produce equal torque� Approach: Adapt individual cylinder fuel quantity according to
an indication of cylinder imbalance e.g., based on crankshaft acceleration
� Process passage time between two teeth on the tooth-wheel:
)()(
,
12
1
NtNtT
TTI
i
iii
−=−= −
� An alternative measure which is closer related to acceleration and also scales automatically with engine speed is:
)(25.0
,)(60
,12
112
031
1
0
NNN
kN
NNk
TTT
kk
I tot
toti
iii −
=−=−⋅= −
�
24th American Control Conference
June 8-10, 2005
Aftertreatment Control
� Selective Catalytic Reduction (urea)� Lean NOx Trap� Diesel Particulate Filters� Active Lean NOx Catalyst� Combinations of the above
�
24th American Control Conference
June 8-10, 2005
Implementation Considerations
� Automotive microcontrollers are limited in terms of chronometrics and memory
� Control algorithms must be calibratable and designed concurrently with calibration procedures
� Requirements and system interactions (including in abnormal conditions) need to be fully understood
� Portability to different powertrain configurations and maintainability are important





























