Embed Size (px)
Citation preview

l
is
. It is
, is
Information Processing Letters 93 (2005) 29–36
www.elsevier.com/locate/ip
Diagnosability of star graphs under the comparison diagnosmodel
Jun Zheng, Shahram Latifi∗, Emma Regentova, Kai Luo, Xiaolong Wu
Department of Electrical and Computer Engineering,University of Nevada, Las Vegas, Las Vegas, NV 89154, USA
Received 11 March 2003; received in revised form 7 July 2004
Available online 28 October 2004
Communicated by F.B. Schneider
Abstract
In this paper, the diagnosability ofn-dimensional star graphSn under the comparison diagnosis model has been studiedproved thatSn is (n − 1)-diagnosable under the comparison diagnosis model whenn � 4. 2004 Elsevier B.V. All rights reserved.
Keywords:Diagnosability; Comparison diagnosis model;Star graph; Interconnection networks
1. Introduction jor approach, proposed by Malek and Maeng [6]
orithlt-
g-sors
en-thet al.gh
ma-
called the comparison diagnosis model. The diagno-airsare
cen-lts,beas
er-canmes-di-ndosis
atehe
erved
Fault-tolerance computing is very important fa multiprocessor system. The first step to deal wfaults is to identify the faulty processors from the faufree ones. The identification process is called thediag-nosisof the system. Thediagnosabilityof the systemis defined as a numbert such that the system is dianosable as long as the number of the faulty procesis not greater thant [3].
Several diagnosis models were proposed to idtify the faulty processors. One major approach isPMC diagnosis model introduced by Preparata e[7]. The diagnosis of the system is achieved throutwo linked processors testing each other. Another
* Corresponding author.E-mail address:[email protected] (S. Latifi).
0020-0190/$ – see front matter 2004 Elsevier B.V. All rights resdoi:10.1016/j.ipl.2004.09.011
sis is performed by comparing the responses of pof processors to the same input. The comparisonsdone by other processors in the system and notral entity involves. Based on the comparison resuthe faulty/fault-free status of the processors canidentified. In [8], the comparison diagnosis model wfurther studied. A set of criteria was given for detmining whether the faulty processors in the systembe diagnosed, and most importantly a polynomial-tialgorithm is presented to identify the faulty procesors if the system is known to be diagnosable. Theagnosabilities ofhypercube, enhanced hypercube acrossed hypercube under the comparison diagnmodel were studied in [3,9].
The star graph has proved to be a viable candidfor interconnecting the multiprocessor system [1]. T
.

30 J. Zheng et al. / Information Processing Letters 93 (2005) 29–36
features of the star graph include low degree of node,small diameter, partitionability, symmetry, and high
rdi-
theis
iag-eed
asg
belf
erslededthe
34dge
to
y an
anted-
y
eleded
rs
sors,as
.
islts,
-ors
edbil-
kindas
to auchthe
degree of fault-tolerance. The diagnosabilities of stagraph under the three strategies based on the PMCagnostic model were studied in [5]. In this paper,diagnosability ofSn under the comparison diagnosmodel has been studied. We prove that it isn−1 whenn � 4.
2. Preliminaries
In this section, the star graph, the comparison dnosis model and some definitions and notations nfor our discussion are introduced.
2.1. Star graph
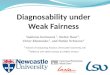
An n-dimensional star graph, also referred toan n-star or Sn, is an undirected graph consistinof n! nodes (or vertices) and(n − 1)n!/2 edges (orlinks) [1]. Each node is uniquely assigned a laa1a2 · · ·am · · ·an, which is a distinct permutation othe set of symbols{a1, a2, . . . , an}. Without loss ofgenerality, let this symbol set be the set of integ{1,2, . . . , n}. Two nodes are linked by an edge labei if and only if the label of one node can be obtainfrom the label of another node by interchangingfirst symbol with theith symbol, 2� i � n. For exam-ple, in a 4-star containing 4! nodes, two nodes 12and 4231 are neighbors and joined through an elabeled 4. InSn each node is connected ton−1 neigh-bors byn − 1 edges. EachSn can be decomposed inn(n − 1)-dimensional star graphSn−1. A 4-star graphS4 is shown in Fig. 1.
2.2. The comparison diagnosis model
A multiprocessor system can be represented bundirected graphG = (V ,E), whereV represents theset of nodes andE represents the set of edges. Inmultiprocessor system, each processor is represeby a nodeu ∈ V and each communication link between a pair of processorsu andv is represented ban edge{u,v} ∈ E.
The comparison diagnosis strategy can be modas a multigraphM = (V ,C) whereV is the same nodset defined inG. C is the labeled edge set. A labele
Fig. 1. The 4-star graphS4.
edge{u,v}w is said to belong toC if (u, v) is anedge labeled byw, which implies that the processou andv are compared by processorw. Since differentcomparators can compare the same pair of procesM is a multigraph. Denote the comparison resultr((u, v)w) such thatr((u, v)w) = 0 if the outputs ofuandv agree andr((u, v)w) = 1 if the outputs disagreeIf the comparatorw is fault-free andr((u, v)w) = 0,the processorsu andv are fault-free. Ifr((u, v)w) = 1,at least one of the three processorsu,v,w are faulty.If the comparatorw is faulty, the comparison resultunreliable. The collection of the comparison resudefined as a functions :C → {0,1}, is called thesyn-dromeof the diagnosis. A system isdiagnosableif forevery syndromes there is a unique subsetF ⊆ V thatis consistent with it. At-diagnosablesystem is the system diagnosable if the number of the faulty processis not greater thant wheret is thediagnosabilityofthe system. In [8], a polynomial algorithm is proposto diagnose the system provided that the diagnosaity of the system is known. Thus, the diagnosability ofa system must be determined before using suchof algorithms. However, this is not an easy problemindicated in [3,9].
Different comparison schemes can be appliedfixed system. In this paper, we want to gain as mknowledge as possible about the faulty status of

J. Zheng et al. / Information Processing Letters 93 (2005) 29–36 31
system. The special multigraph representing this com-parison scheme is defined asM∗ = (V ,C∗), where
l
iliceshele.
t
s
d
ide
3. Diagnosability of star graphs under thecomparison model
e aach
za-n-
st
h.
w-
isi.e.,t,ese
on.ve acy-at(2),m-cy-at
star
s
scu-
C∗ = {(u, v)w | (u,w), (v,w) ∈ E}.
2.3. Definitions and notations
We denoteN(v) = {u | {v,u} ∈ E} as the set of alnodes that are linked to nodev. For a subsetX ⊂ V ,the set of nodes inV –X that linked to nodes ofX,N(X) = (
⋃v∈X N(v)) − X.
A cycleC of the graphG is defined as a closed trawith at least one edge and with no repeated vertexcept that the initial vertex is the terminal vertex. Tlength of a cycle is the number of edges in the cycThe number of nodes in a cycleC is denoted as|C|.
Given a systemG and the comparison schemeM,for a nodeu ∈ V , let Xu is the set of nodes such tha
Xu = {v | either{u,v} ∈ E or {u,v} ∈ C for somew
}.
That is, a node inXu is either linked tou or comparedwith u by some other node. LetYu is the set of edgeamong nodes ofXu, such that
Yu = {{v,w} | v,w ∈ Xu and{u,v}w ∈ C}.
DefineGu = (Xu,Yu).For a graphG, a subsetK of G is called avertex
cover of G if every edge ofE has at least one enin K. A vertex cover of minimum cardinality inG iscalledminimum vertex cover. For a nodeu ∈ V , thecardinality of a minimum vertex cover ofGu is calledtheorder of nodeu.
DenoteT (X) to be the set of nodes that are outsof X and are compared to some nodes ofX by somenodes ofX (Fig. 2). GivenG andM, for a subset ofnodesX ⊂ V ,
T (X) = {u | {u,v}w ∈ C andv,w ∈ X andu /∈ X
}.
Fig. 2. An example ofX and itsT (X).
There are several different ways to characterizt-diagnosable system under the comparison appro[8]. In this study, we use one particular characterition given in [8] which gives the three sufficient coditions for a system to bet-diagnosable.
Theorem 1 [8]. A system withN nodes ist-diagnos-able if (1) N � 2t +1, (2) each node has order at leat , (3) for eachX ⊂ V such that|X| = N − 2t + p and0 � p � t − 1, |T (X)| > p.
Lemma 1 [4]. There are no odd cycles in a star grap
Lemma 2 [4]. There are even cycles with lengthl inSn if l � 6 andl � n!.
From Lemmas 1 and 2, we can deduce the folloing corollary:
Corollary 1. If two nodes are adjacent, thereno common neighbor node of these two nodes,|N(u) ∩ N(v)| = 0. If two nodes are not adjacenthere is at most one common neighbor node of thtwo nodes, i.e.,|N(u) ∩ N(v)| � 1.
Proof. The two cases can be proved by contradictiFor case (1), if two nodes are adjacent and they hacommon neighbor node, these 3 nodes will form acle of length 3. It is a contradiction to Lemma 1 ththere are no odd cycles in a star graph. For caseif two nodes are adjacent and they have two comon neighbor nodes, these 4 nodes will form acle of length 4. It is a contradiction to Lemma 2 ththere is no even cycle with length less than 6 in agraph. �Lemma 3 [2]. If u andv are two nodes of ann-starlabeled with two permutationsP1 and P2 having dif-ferent first symbols, then there aren−1 parallel pathsbetweenu andv. These paths are grouped as follow(c is the number of cycles1 of length at least two,m isthe number of symbols in these cycles): (1) c paths are
1 The cycles here indicate that cyclically ordered sets of symbolwith the property that each symbol’s desired position is that oc

32 J. Zheng et al. / Information Processing Letters 93 (2005) 29–36
ol-
sy-asra-
hencen4
chy
-
l-
ions
Lemma 5. For any four nodesu,v,w,x in Sn,|N({u,v,w,x})| � 4n − 10.
es,
two
is
nd
ers 1
Fig. 3. Two 6-cyclesC1 andC2, |C1 ∩ C2| = 3.
of minimum length equal toc + m − 2. (2) m − c − 1paths are of lengthc+m. (3)n−m paths are of lengthc + m + 2.
From Lemma 3, we can deduce the following corlary.
Corollary 2. In Sn, for two6-cyclesC1 andC2, |C1 ∩C2| �= 3.
Proof. By contradiction. Assume for two 6-cycleC1,C2, |C1 ∩ C2| = 3 and the three nodes in both ccles areu,v and w. They can only be connectedshown in Fig. 3 if Lemmas 1 and 2 are not contdicted. Then, from nodeu to nodew, there shouldbe one path of length 2, two paths of length 4. Tthree paths are parallel or node-disjoint paths. Sic = 1, m = 3 in this case, from Lemma 3, we cafind that there is only one parallel path of length(Lemma 3, Case 2,m − c − 1 = 1, c + m = 4), whichis a contradiction to the assumption.�Lemma 4 [5]. For any two nodesu,v in Sn,|N({u,v})| � 2n − 4.
Proof. Sn is a regular graph and the degree of eanode isn − 1; this implies that, for any two arbitrarnodesu andv in Sn, |N(u)| = |N(v)| = n − 1.
Case 1: If u and v are adjacent, from Corollary 1,|N(u)∩N(v)| = 0, and|N({u,v})| = |N(u)|+|N(v)| − |{u,v}| = 2n − 4.
Case2: If u and v are not adjacent, from Corolary 1,|N(u)∩N(v)| � 1, and|N({u,v})| = |N(u)|+|N(v)| − |N(u) ∩ N(v)| � 2n − 3 > 2n − 4.
Thus, any two nodesu andv in Sn are connected toat least 2n − 4 other nodes. �pied by the next symbol in the set [2]. For example, the permutatP1= 12345678 and P2= 64237851 consists of the cycles(6,8,1),(4,2,3) and(7,5).
Proof. We consider five cases. DenoteNc is the setof common neighbor nodes among the four nodi.e.,Nc = |N(u) ∩ N(v)| + |N(u) ∩ N(w)| + |N(u) ∩N(x)| + |N(v) ∩ N(w)| + |N(v) ∩ N(x)| + |N(w) ∩N(x)|. From Corollary 1,Nc � 6.
Case1: Four nodes are all adjacent. From Lem-mas 1 and 2, they can only be connected as thecases shown in Fig. 4. For case (a),∣∣N
({u,v,w,x})∣∣= (|N(u)| − |{v}|) + (|N(v)| − |{u,w}|)
+ (|N(w)| − |{v, x}|) + (|N(x)| − |{w}|)
= (n − 2) + (n − 3) + (n − 3) + (n − 2)
= 4n − 10.
For case (b),∣∣N
({u,v,w,x})∣∣= (|N(u)| − |{v}|) + (|N(v)| − |{u,w,x}|)
+ (|N(w)| − |{v}|) + (|N(x)| − |{v}|)
= (n − 2) + (n − 4) + (n − 2) + (n − 2)
= 4n − 10.
Case2: Three nodes are adjacent and anothernot adjacent to these three nodes. Without loss of gen-erality, we consideru,v,w are adjacent andv is themiddle node. From Lemmas 1 and 2,|N({u,v,w}) ∩N(x)| � 2.∣∣N
({u,v,w,x})∣∣= (|N(u)| − |{v}|) + (|N(v)| − |{u,w}|)
+ (|N(w)| − |{v}|) + ∣∣N(x)
∣∣
− ∣∣N
({u,v,w}) ∩ N(x)∣∣
� (n − 2) + (n − 3) + (n − 2) + (n − 1) − 2
= 4n − 10.
Case3: Two nodes are adjacent to each other aother two are adjacent to each other.Without loss ofgenerality, we consideru,v are adjacent to each othandw,x are adjacent to each other. From Lemmaand 2,Nc = |N({u,v}) ∩ N({w,x})| � 2.

J. Zheng et al. / Information Processing Letters 93 (2005) 29–36 33
Fig. 4. Two cases that four nodes are adjacent.
Fig. 5. Four nodes are not adjacent andNc equals (a) 6, (b) 5, (c) and (d) 4, respectively.
∣∣N
({u,v,w,x})∣∣( ) ( )
� (n − 1) + (n − 1) + (n − 1) + (n − 1) − 4
nd
ter
n
(c)
st
an
re
,can
= |N(u)| − |{v}| + |N(v)| − |{u}|+ (|N(w)| − |{x}|) + (|N(x)| − |{w}|) − Nc
� (n − 2) + (n − 2) + (n − 2) + (n − 2) − 2
= 4n − 10.
Case4: Two nodes are adjacent to each other athe other two are not adjacent to any other node.With-out loss of generality, we consideru,v are adjacento each other andw,x are not adjacent to any othnode of the four nodes. From Lemmas 1 and 2,Nc =|N({u,v}) ∩ N(w)| + |N({u,v}) ∩ N(x)| + |N(w) ∩N(x)| � 2.∣∣N
({u,v,w,x})∣∣= (|N(u)| − |{v}|) + (|N(v)| − |{u}|)
+ ∣∣N(w)
∣∣ + ∣
∣N(x)∣∣ − Nc
� (n − 2) + (n − 2) + (n − 1) + (n − 1) − 2
= 4n − 8 > 4n − 10.
Case5: Four nodes are not adjacent.In this case,from Corollary 2,Nc cannot equal to 6 or 5 as showin Figs. 5(a) and (b), respectively. Thus,Nc � 4.WhenNc = 4, there are two cases shown in Figs. 5and (d).
Thus,∣∣N
({u,v,w,x})∣∣= ∣
∣N(u)∣∣ + ∣
∣N(v)∣∣ + ∣
∣N(w)∣∣ + ∣
∣N(x)∣∣ − Nc
= 4n − 8 > 4n − 10.
Thus, any four nodes inSn are connected to at lea4n − 10 other nodes. �Lemma 6. A node ofSn has ordern − 1.
Proof. Since all nodes ofSn link to others in exactlythe same way, it is sufficient to check the order forarbitrary nodeu = a1a2 . . . an−1an. By the definitionof Gu = (Xu,Yu),Xu consists of those nodes that aeither linked tou(X1) or being compared tou(X2).So,Xu is the union of two setsX1 andX2:
Xu = X1 ∪ X2
= {a2a1 . . . an−1an, . . . , an−1a2 . . . a1an,
ana2 . . . an−1a1}∪{
(a3a1a2 . . . an−1an, . . . , ana1 . . . an−1a2), . . . ,
(a2an . . . an−1a1, . . . , an−1a2 . . . ana1)}.
The total number of nodes inX1 is n − 1, and thetotal number of nodes inX2 is (n − 1)(n − 2).
Yu consists of all edges{v,w} such thatw is a com-parator ofu andv, i.e.,w is linked tou andv is linkedto w. That is,
Yu = {{v,w} | w ⊂ X1, v ⊂ X2}.
It can be seen thatGu is a symmetric-structuredso-called bipartite graph (a graph whose vertices

34 J. Zheng et al. / Information Processing Letters 93 (2005) 29–36
i-m,exng.thatTheer. 6,
enhus
edde
t
6,the
isr
s
e
e
,
of
Fig. 6. The illustration ofu,X1,X2, Yu andGu.
be partitioned into two setsV1 andV2 such that everyedge has one end inV1 and another inV2) (Fig. 6). Tofind the order ofu, we need to find the size of the minmum vertex cover. From the Konig-Egervary theorein a bipartite graph, the size of the minimum vertcover is equal to the size of the maximum matchiA matching is a set of edges of the graph suchno two edges in the set share a common vertex.matching is maximum if it has the maximum numbof edges over all matchings in the graph. From Figit can be seen that the edges inYu can be divided into(n − 1) groups. The maximum matching can be thconstructed by taking one edge from each group. Tthe size of the maximum matching forGu is (n − 1),which is also the order ofu. �Theorem 2. An n-star-structured system, representby graphG = (V ,E), with V being the node set anE being the link set, is(n − 1)-diagnosable under thcomparison model whenn � 4 and the comparisonscheme isM∗ = (V ,C∗).
Proof. We prove thatSn satisfies all three sufficienconditions of Theorem 1 forn � 4.
As we know, the number of nodesN in Sn is n!. It iseasy to show thatn! � 2(n−1)+1 is true whenn � 3.Thus the first condition holds. According to Lemmathe second condition holds. It remains to show thatthird condition holds forSn, i.e., for an arbitraryX ⊂V such that|X| = n! − 2(n − 1) + p, 0� p � n − 2,|T (X)| > p is true.
We prove it in two steps. First, we show that thistrue forp = n−2. Then we prove that it also holds fop = 0,1, . . . , n − 3.
Fig. 7. Two cases that a node does not belong toT (X).
Fig. 8. Three cases that two nodesu,v /∈ T (X).
If p = n − 2, then|X| = n! − 2(n − 1) + n − 2 =n! − n and
|V − X| = n. (1)
We prove by contradiction and assume|T (X)| � n −2, which means thatV −X contains at least two nodenot inT (X). Let u,v ∈ V − X andu,v /∈ T (X). Fromthe definition ofT (X), if u /∈ T (X), thenu must be-long to the following two cases: (a)N(u) ∩ X = ∅,(b) if u′ ∈ N(u) ∩ X, thenN(u′) ∩ X = ∅ (Fig. 7). Iftwo nodesu,v /∈ T (X), they must belong to one of ththree cases shown in Fig. 8.
Case 1: Both nodes belong to case(a). FromLemma 4, |N({u,v})| � 2n − 4. Then |V − X| �|N({u,v})| + |{u,v}| � 2n − 4+ 2 = 2n − 2.
Case2: One node belongs to case(a), one nodebelongs to case(b). Without loss of generality, wconsideru belongs to case (b),v belongs to case(a). u′ and v are not adjacent becausev is not con-nected to any node inX. From Case 2 of Lemma 4|N({u′, v})| � 2n − 3. Then|V − X| � |N({u′, v})| +|{v}| � 2n − 3+ 1 = 2n − 2.
Case 3: Both nodes belong to case(b). In thiscase,u′ and v′ are not adjacent. From Case 2Lemma 4,|N({u′, v′})| � 2n − 3. Then |V − X| �|N({u′, v′})| � 2n − 3.

J. Zheng et al. / Information Processing Letters 93 (2005) 29–36 35
Fig. 9. Five cases that four nodesu,v,w,x /∈ T (X).
For all three cases,|V −X| � 2n−3. But 2n−3> Case3: Two nodes belong to case(a),the other two
n = |V − X| whenn � 4, a contradiction to (1).etn
ne
r-
2
ot.
r.
belong to case(b) (Fig. 9(c)). Without loss of gener-
of
f
,
h
For p = 0, . . . , n − 3, let |X| = n! − 2(n − 1) + p,then
|V − X| = 2(n − 1) − p. (2)
Again, we prove by contradiction and assum|T (X)| � p, which meansV − X contains at leas2(n− 1)− p −p = 2(n− p − 1) nodes that are not iT (X). Sincep � n−3, we have 2(n−p −1) � 4. Letu,v,w,x ∈ V −X be four nodes such thatu,v,w,x /∈T (X). For those four nodes, they must belong to oof the five cases shown in Fig. 9.
Case1:All four nodes belong to case(a) (Fig. 9(a)).From Lemma 5,|V − X| � |N({u,v,w,x})| + |{u,v,
w,x}| � 4n − 10+ 4 = 4n − 6.Case2: One node belongs to case(b), three nodes
belong to case(a) (Fig. 9(b)). Without loss of geneality, we assumeu is connected tou′ in X. Thenu′is not adjacent tov,w, or x. For v,w,x, we considerthree subcases.
Subcase2.1:u,v andw are adjacent. From Caseof Lemma 5,|V −X| � |N({u′, v,w,x})|+|{v,w,x}|� 4n − 10+ 3 = 4n − 7.
Subcase2.2: Two nodes are adjacent, one is nFrom Case 4 of Lemma 5,|V − X| � |N({u′, v,w,x})| + |{v,w,x}| � 4n − 8+ 3= 4n − 5.
Subcase2.3:u,v,w are not adjacent to each otheFrom Case 5 of Lemma 5,|V − X| � |N({u′, v,w,x})| + |{v,w,x}| � 4n − 8+ 3= 4n − 5.
ality, we assumeu is connected tou′ in X,v is con-nected tov′ in X. Thenu′ andv′ are not adjacent toeach other, also not adjacent tow or x. For w,x, weconsider two subcases.
Subcase3.1:w andx are adjacent. From Case 4Lemma 5,|V − X| � |N({u′, v′,w,x})| + |{w,x}| �4n − 8+ 2 = 4n − 6.
Subcase3.2: w and x are not adjacent. FromCase 5 of Lemma 5,|V − X| � |N({u′, v′,w,x})| +|{w,x}| � 4n − 8+ 2 = 4n − 6.
Case4: Three nodes belong to case(b), the otherone belongs to case(a) (Fig. 9(d)). Without loss ogenerality, we assumeu is connected tou′ in X,v isconnected tov′ in X,w is connected tow′ in X. Thenu′, v′,w′ are not adjacent to each other, alsou′, v′,w′are not adjacent tox. From Case 5 of Lemma 5|V − X| � |N({u′, v′,w′, x})| + |{x}| � 4n − 8+ 1=4n − 7.
Case5: Four nodes belong to case(b) (Fig. 9(e)).In this case,u′, v′,w′, x ′ are not adjacent to eacother. From the Case 5 of Lemma 5,|V − X| �|N({u′, v′,w′, x ′})| � 4n − 8.
For all 5 cases,|V − X| � 4n − 8. But, 4n − 8 >
2(n − p − 1) = |V − X| whenn � 4. Again, a contra-diction to (2). �

36 J. Zheng et al. / Information Processing Letters 93 (2005) 29–36
s.e
h1.
-n-
wetrel ifo-se
.en-ttheest-be
used as a component of a larger diagnosis scheme toperform a given phase of fault location, as opposed to
re-ve
n-66.-trib.
n di-02)
lesallel
om-
fornat.
sign-put.
sorrans.
er-om-
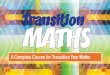
Fig. 10. In S3, X consists of all the black square node|X| = 3! − 2 × 2 + 0 = 2 (p = 0). Since none of the white squarnodes belongs toT (X), the third condition|T (X)| > p does nothold.
Finally, we point out thatS4 is the least star grapsatisfying the three sufficient conditions in TheoremIn Fig. 10, we give an example to show thatS3 is not2-diagnosable.
4. Conclusion
The diagnosability of stargraph under the comparison diagnosis model is studied in this paper. Uder this model, the system is self-diagnosable ifknow the diagnosability of the system. We prove thaa system with then-dimensional star graph structuis (n − 1)-diagnosable under the comparison moden � 4. Based on the result, a polynomial-time algrithm proposed in [8] can be directly used to diagnothe system if there are at mostn− 1 faulty processorsThe diagnosis involves only one test phase to idtify the faulty processors and one repair/replacemenphase. Thus it is applicable in the environment thatcomponents are reliable and periodic and quick tings are affordable. Furthermore, the algorithm can
being used as a stand-alone diagnosis tool.
Acknowledgements
The authors would like to thank the anonymousviewers for their valuable comments, which improthe quality of this paper.
References
[1] S.B. Akers, A group-theoretic model for symmetric interconection networks, IEEE Trans. Comput. 38 (4) (1989) 555–5
[2] K. Day, A. Tripathi, A comparative study of topological properties of hypercubes and star graphs, IEEE Trans. Parallel DisSyst. 5 (1) (1994) 31–37.
[3] J. Fan, Diagnosability of crossed cubes under the comparisoagnosis model, IEEE Trans. Parallel Distrib. Syst. 13 (10) (201099–1104.
[4] J. Jwo, S. Lakshmivaraham, S.K. Dhall, Embedding of cycand grids in star graphs, in: Proc. 2nd IEEE Symp. on Parand Distributed Processing, 1990, pp. 540–547.
[5] A. Kavianpour, Sequential diagnosability of star graphs, J. Cput. Electrical Engrg. 22 (1) (1996) 37–44.
[6] J. Maeng, M. Malek, A comparison connection assignmentself-diagnosis of multiprocessor systems, in: Proc. 11th InterFault-Tolerant Computing, 1981, pp. 173–175.
[7] F.P. Preparata, G. Metze, R.T. Chien, On the connection asment problem of diagnosable systems, IEEE Trans. ComEC 16 (1967) 448–454.
[8] A. Sengupta, A. Dahbura, On self-diagnosable multiprocessystems: diagnosis by the comparison approach, IEEE TComput. 41 (11) (1992) 1386–1396.
[9] D. Wang, Diagnosability ofhypercubes and enhanced hypcubes under the comparison diagnosis model, IEEE Trans. Cput. 48 (12) (1999) 1369–1374.