Embed Size (px)
Citation preview
Development Of Simulation and VR
Human Dynamics in a Virtual World
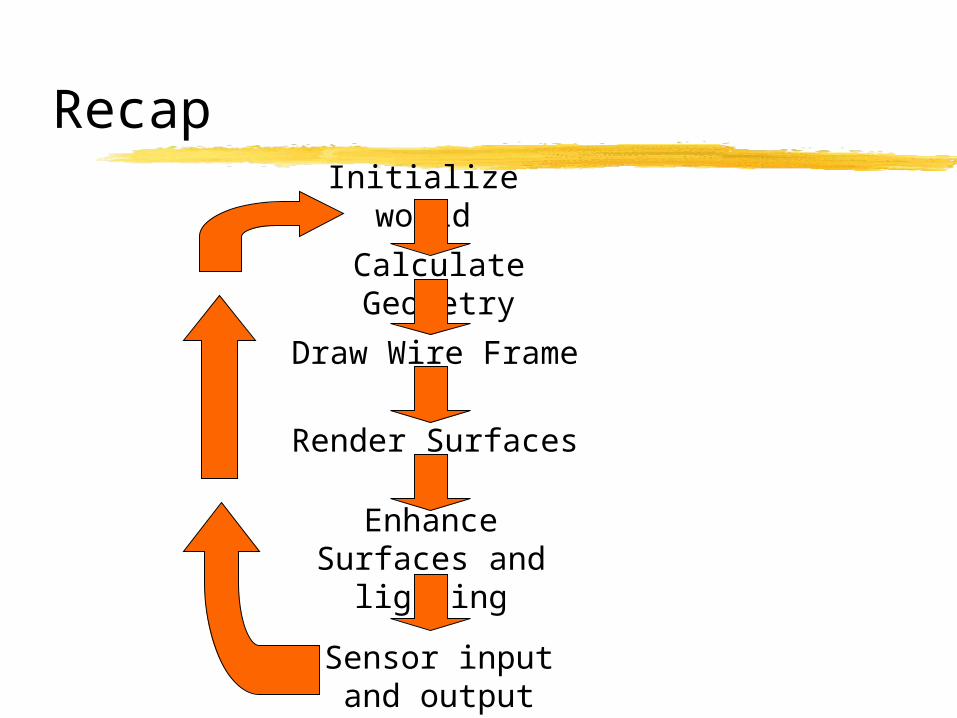
Recap
Calculate Geometry
Draw Wire Frame
Render Surfaces
Enhance Surfaces and lighting
Sensor input and output
Initialize world
Human Dynamics
Users described as participantsbasic interaction involves control of
camera (viewpoint) exploratory navigation / locomotion Walk through systems
More advanced environment allow interaction Touch , selection, manipulation referred to as direct manipulation
Components of interaction
VR modelSimulation of bodyInteraction with virtual bodyObject pair collisionGeneral collision detection
VR Model
Goal of Being There Presence or Telepresnce Held and Durlach 1992, Draper 1998
Must model expectations -> realismIdeal VR model must Immerse
participant in visual, audio, touch , smell and taste
Humans can process several audio streams and can focus and segrgate on one - Wenzel 1992
VR model - ImmersionSurrounds bodyfills visual fieldextensive inclusive (replaces reality)Vividhuman body
in CAVE actual body can obscure projection of virtual objects
In HMD body must be represented
VR model - HCI
Mouse and keyboard has two problems gulf of execution gulf of evaluation
Hutchins 1986
Direct Manipulation paradigmTracked HMD is simplest form 0- 1 to
1 mapping, Low cognitive overheadUsing mouse - must map actions to
different translations
VR Model - InteractionImmersion and tracking rely on
registrationRegistration implies that motion of limbs
accurateBetter appreciation of 3D environmentCannot lose interaction - reduces gulf of
executionGulf of evaluation reduced when whole
virtual body used - Slater and Usoh 1994, Mine 1997
Simulation of Body
Body model is the description of the interface
eyes are viual interface, ears are audio interface
geometric description drawn from egocentric point of view
description of hand and fingers forms basis of grasping simulation for picking up objects (Boulic 1996)

Simulation of Body- Building the bodyThe more points represneting the body the
more realistic the movementUp to 90 points for motion-capture in animationStandard for human skeleton (H-Anim 1999)More typically head, Torso, Both hands Inferred movement from limited points Inverse kinematics problem - infinite
possibilities of movement in virtual environment, consistent restraint
Elbow position in 4- Tracker system (Badler, 1993)
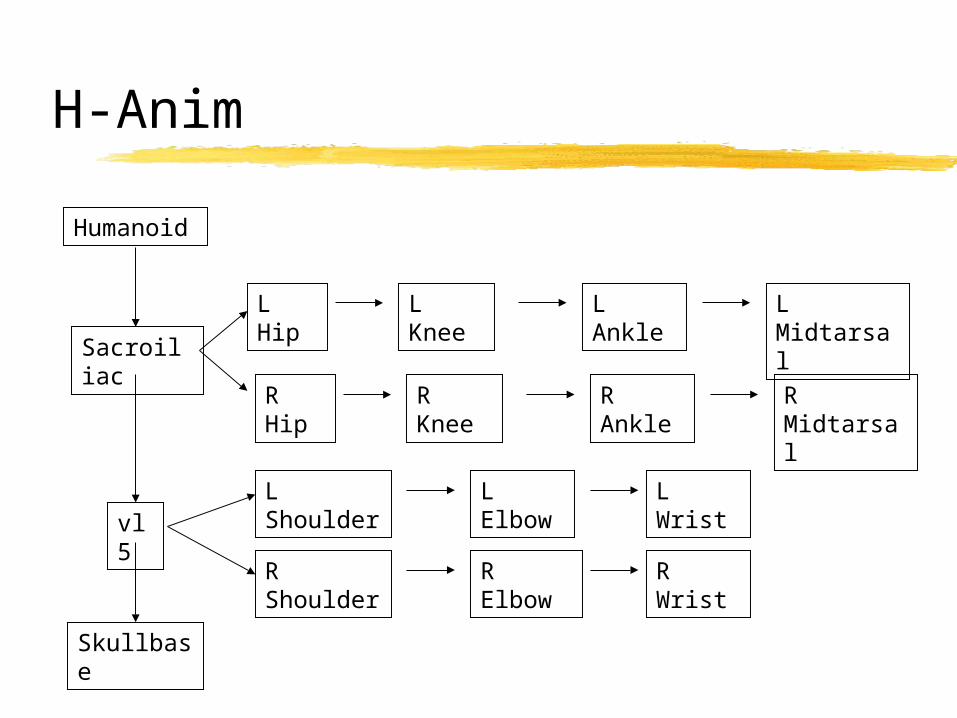
H-Anim
Humanoid
Sacroiliac
L MidtarsalL AnkleL KneeL Hip
R MidtarsalR AnkleR KneeR Hip
L WristL ElbowL Shoulder
R WristR ElbowR Shoulder
vl5
Skullbase
Simulation Of body - tracking the participantChoice of system depends on 5 factors
accuracy, resolution, range, lag, update rate
Many different tracking technologies Meyer 1992 frequency and time
ultrasonic time-of-flight measurementPulsed Infra-redGPSOptical GyroscopesPhase difference
Simulation Of body - tracking the participant
Spatial ScanOutside-inInside-out
Inertial sensing mechanical gyroscope Accelerometer
Mechanical LinkagesDirect - Field Sensing

Interaction with virtual Body
Limitations mean reliance on metaphors for object manipulation (grasping and moving) locomotion (movement)
Limitations in haptics mean that restraint on the virtual environment exists
Virtual Bodies
VBs are represenetations of human involvement in 3D applications and VR
Hierarchical connected geomtry specifications
Principles similar to robotics
What is a robot?
Joseph Engelberger, a pioneer in industrial robotics, once remarked "I can't define a robot, but I know one when I see one."
Many different machines called robots Everybody has a different idea of what constitutes
a robotName from robota – forced labour
What relevance to us?
VR models use robotic principlesAvatars behave like robotsSimulations of robots used to test
real robotsMay be used to control remote
robotics
Robot Arm
Fitted with end effectorUsually interchangeableArtificial Hand , paint gun, welding rodPressure sensor needed to prevent
crushingProgrammed by incremental steps
which are then replicated ad infinitum
Frameworks, Chains (or Skeletons)
A lot of mechanical objects in the real world consist of solid sections connected by joints
Obviously robot arm but also Creatures such as humans and animals. Car Suspension Ropes, string and Chains
Frameworks, Chains (or Skeletons)
Sections and joints of robot arm are known as a 'chain‘
In creatures could be referred to as a skeleton
Moveable sections correspond to bones
Attachments between bones are joints.
Frameworks, Chains (or Skeletons)
Motions of chains can be specified in terms of translations and rotations.
Forward Kinematics - From the amounts of rotation and bending of each joint in an arm, for example, the position of the hand can be calculated.
Inverse Kinematics - If the hand is moved, the rotation and bending of the arm is calculated, in accordance with the length and joint properties of each section of the arm.
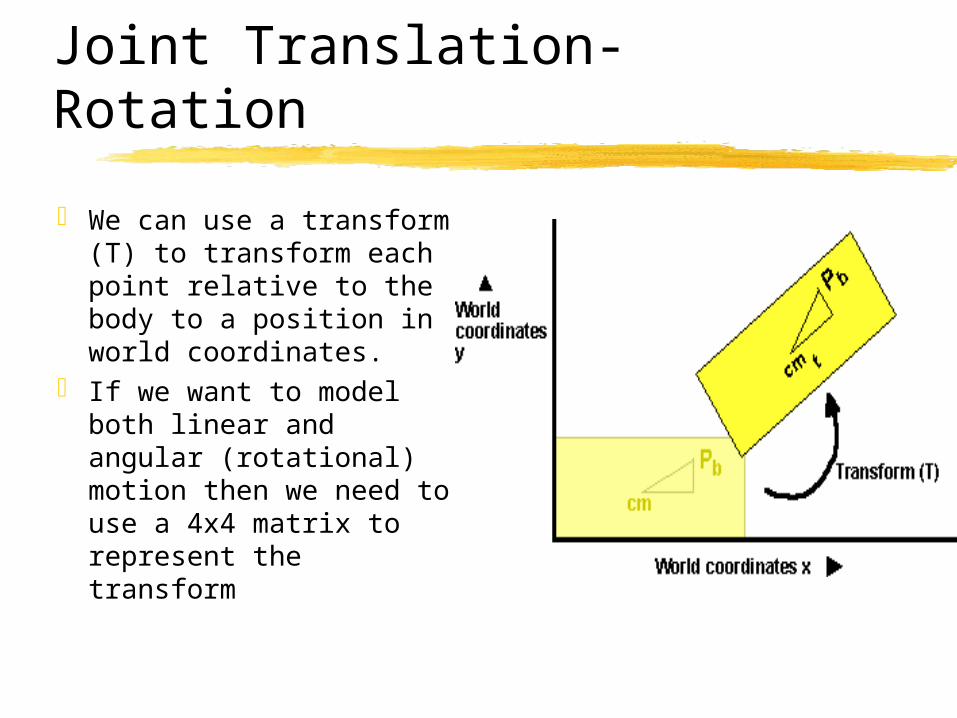
Joint Translation-Rotation
We can use a transform (T) to transform each point relative to the body to a position in world coordinates.
If we want to model both linear and angular (rotational) motion then we need to use a 4x4 matrix to represent the transform
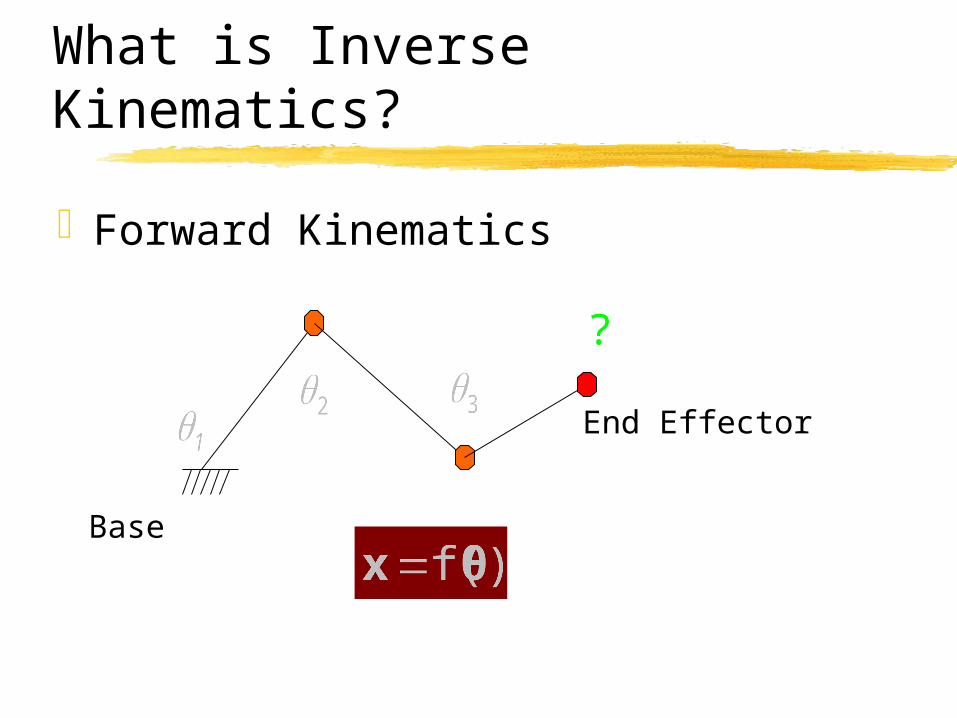
What is Inverse Kinematics?
Forward Kinematics
Base
End Effector
?
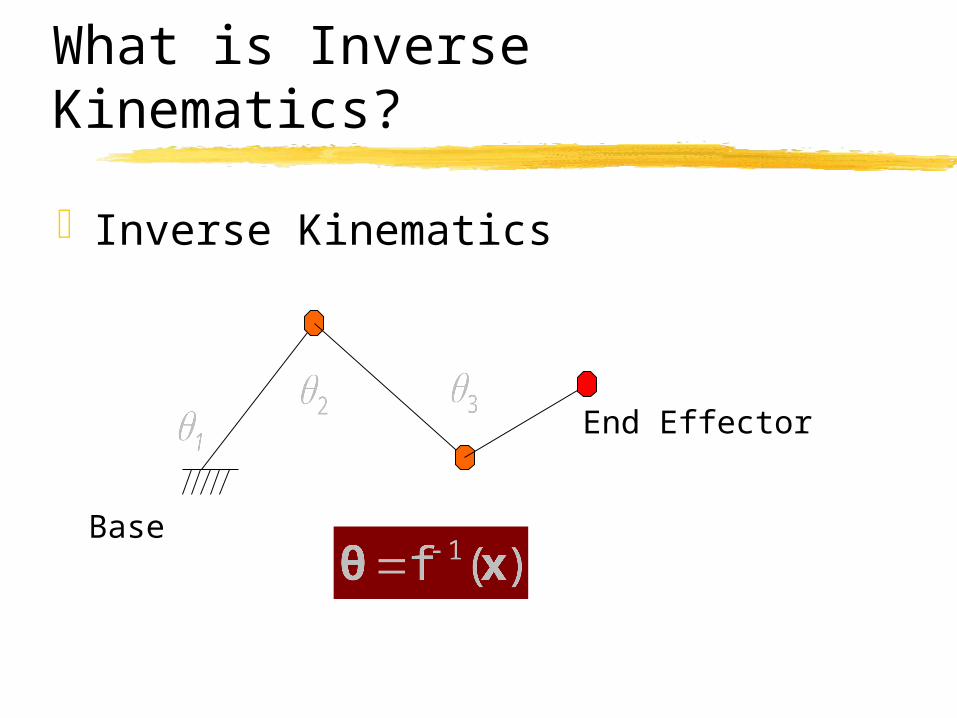
What is Inverse Kinematics?
Inverse Kinematics
Base
End Effector
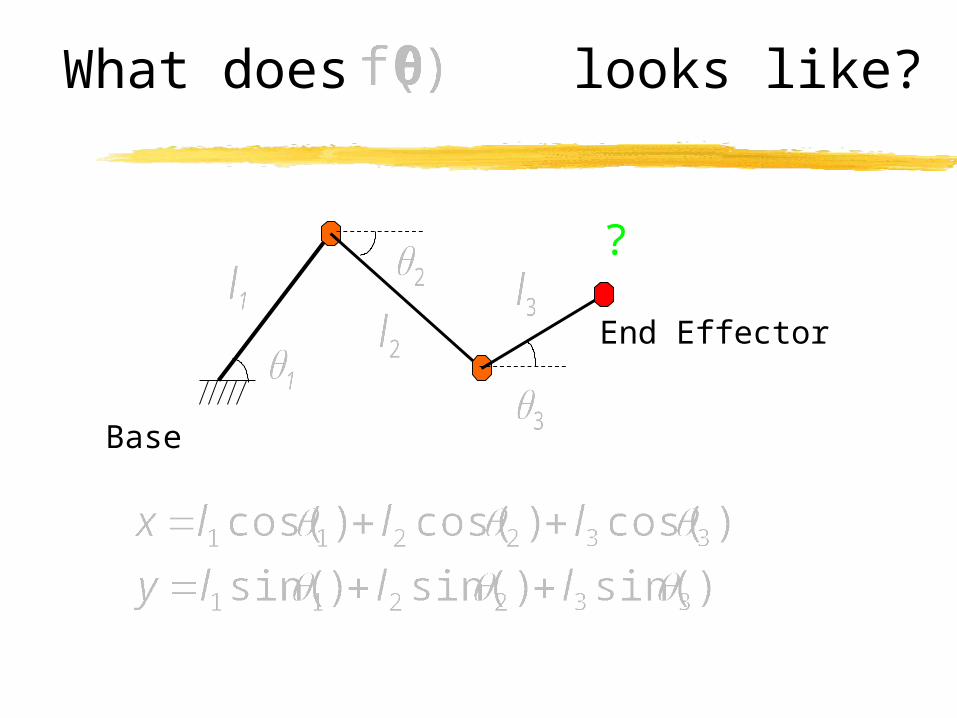
What does looks like?
?
Base
End Effector
Solution to
Our example
Number of equation : 2
Unknown variables : 3
Infinite number of solutions !
Redundancy
System DOF > End Effector DOF
Our example
System DOF = 3End Effector DOF = 2
Redundancy
A redundant system has infinite number of solutions
Human skeleton has 70 DOF Ultra-super redundant
How to solve highly redundant system?
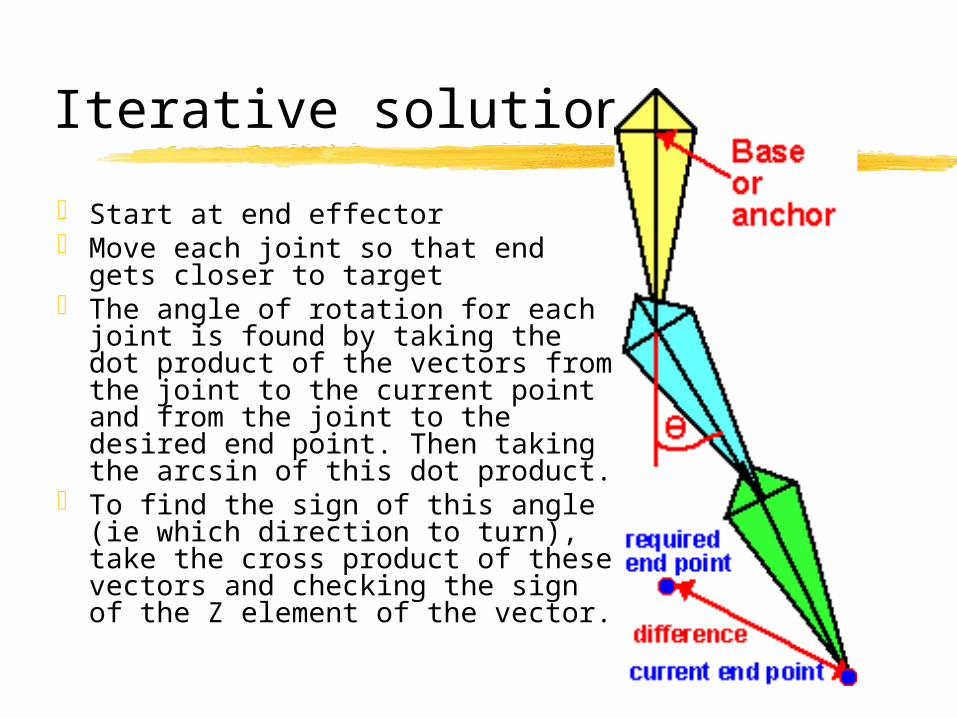
Iterative solution
Start at end effector Move each joint so that end
gets closer to target The angle of rotation for each
joint is found by taking the dot product of the vectors from the joint to the current point and from the joint to the desired end point. Then taking the arcsin of this dot product.
To find the sign of this angle (ie which direction to turn), take the cross product of these vectors and checking the sign of the Z element of the vector.
Goal Potential Function
“Distance” from the end effector to the goal
Function of joint angles : G()
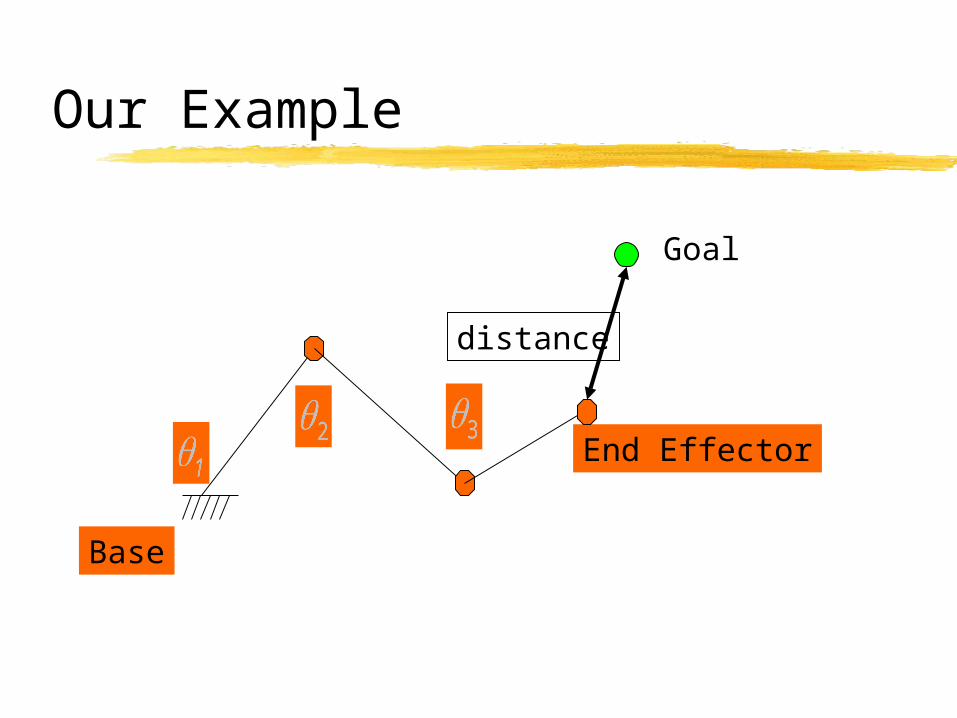
Our Example
Base
End Effector
Goal
distance
Limitations
Will G() be always zero? No : Unreachable Workspace
Will the solution be always found? No : Local Minima/Singular
ConfigurationWill the solution be always unique?
No : Redundancy
Applications to VR/3d Apps
Control of humanoid componentsCan be considered complex chains of
interconnected geometrical objectsActivities
Grasp Walk Collide Interact with other objects
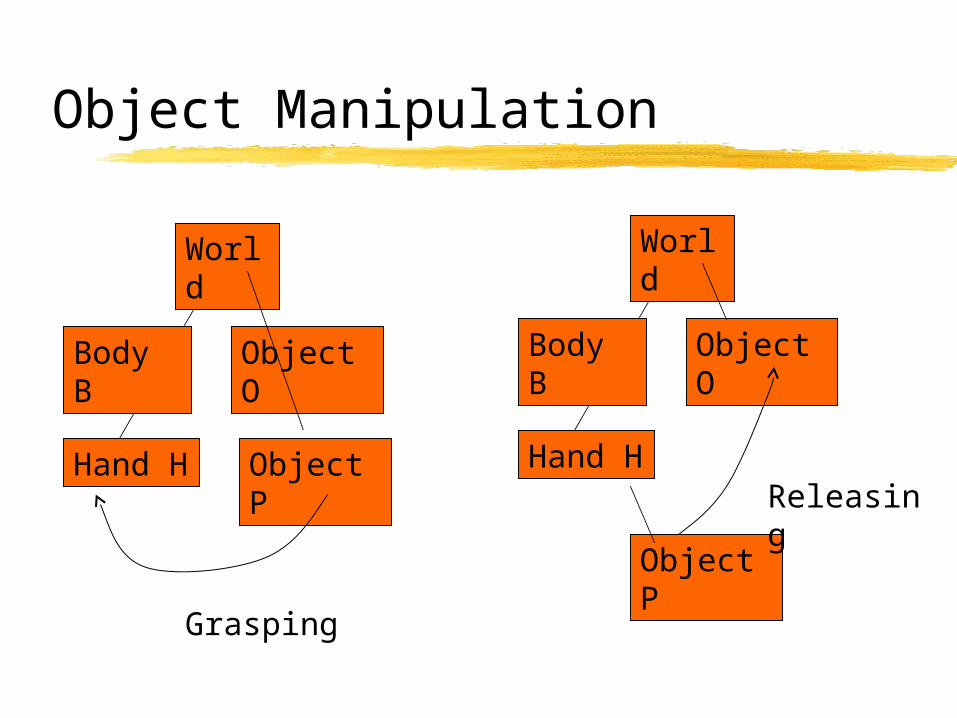
Object Manipulation
World
Body B Object O
Hand H Object P
World
Body B Object O
Hand H
Object P
Grasping
Releasing
Object Manipulation
Hand posture may not be tracked - makes grasping difficult
Must establish a point at which union is deemed to have taken place
Moved by repositioning in the scene graph
Robinett and Holloway 1992
Locomotion
Tracker has a limited rangeMust use locomotion metaphor to
move greater distancesLocomotion is on an even plane ,
virtual terrain may not beCollision detection can be employed
to raise or lower the participant accordingly
Object Manipulation
Hand posture may not be tracked - makes grasping difficult
Must establish a point at which union is deemed to have taken place
Moved by repositioning in the scene graph
Robinett and Holloway 1992
Locomotion
Tracker has a limited rangeMust use locomotion metaphor to
move greater distancesLocomotion is on an even plane ,
virtual terrain may not beCollision detection can be employed
to raise or lower the participant accordingly
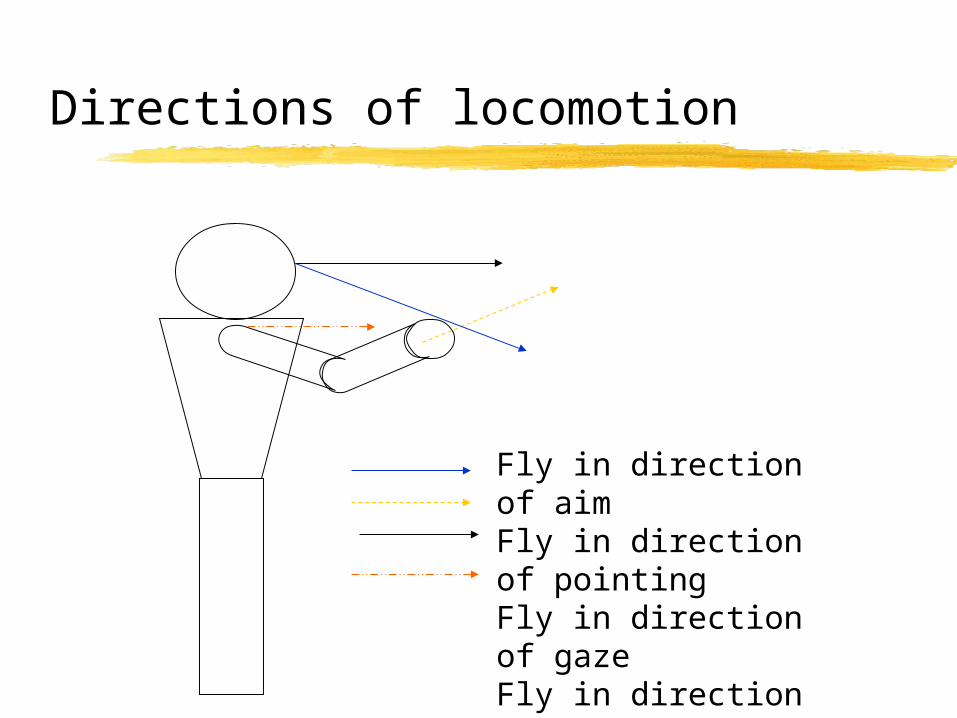
Fly in direction of aimFly in direction of pointingFly in direction of gazeFly in direction of torso
Directions of locomotion
Books and Articles:
The Handbook of Virtual Environments (2002), Kay Stanney (ed), Lawrence Erlbaum.
Isdale, J., 1998, What is VR? http://www.isdale.com/jerry/VR/WhatIsVR.html
Kalawsky, R., 1993, The Science of Virtual Reality and Virtual Environments, Addison Wesley.
Rheingold, H., 1991, Virtual Reality, Secker and Warburg, London.
Wilson, J.R., D’Cruz, M., Cobb, S. and Eastgate, R., 1996, Virtual Reality for Industrial Applications, Nottingham University Press.
Resources
www.vrweb.com (VR Solutions Company)www.barco.com/projection_systems/
virtual_and_augmented_reality/www.sgi.com (VR Solutions Company)www.ptc.com (free modelling program)www.sense8.com (trial VR program)www.crystalspace.com (free Games
Engine)