Embed Size (px)
Citation preview

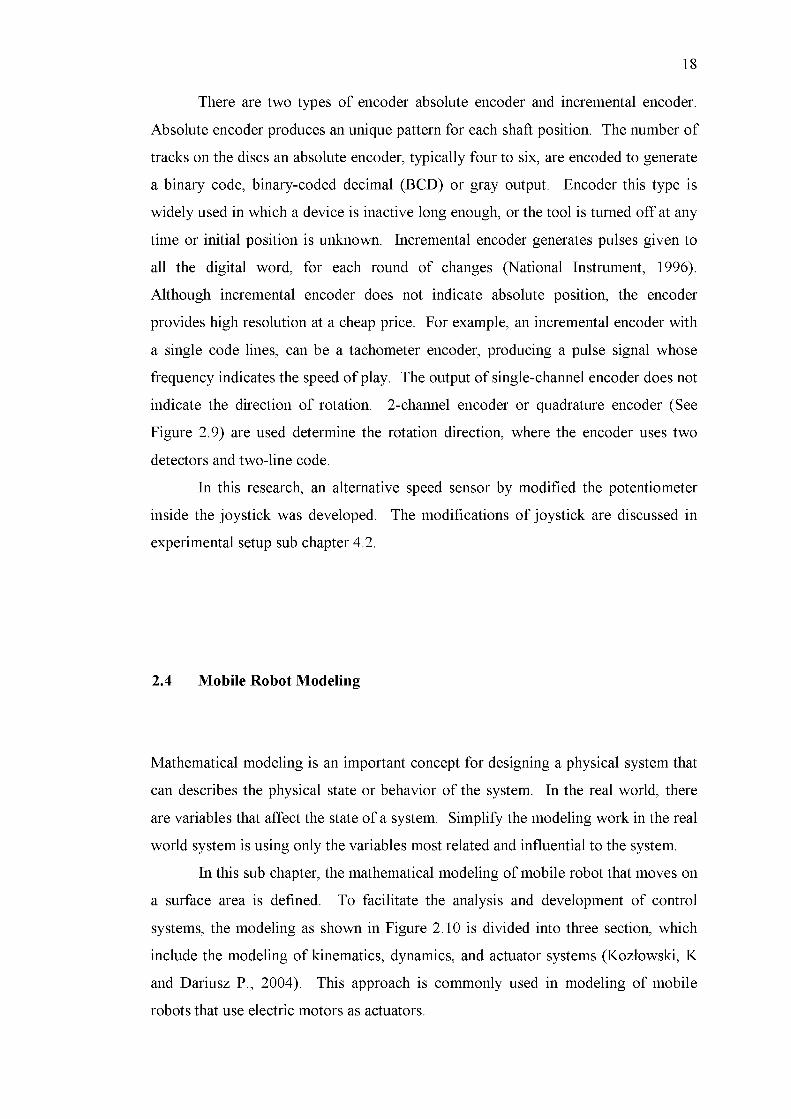
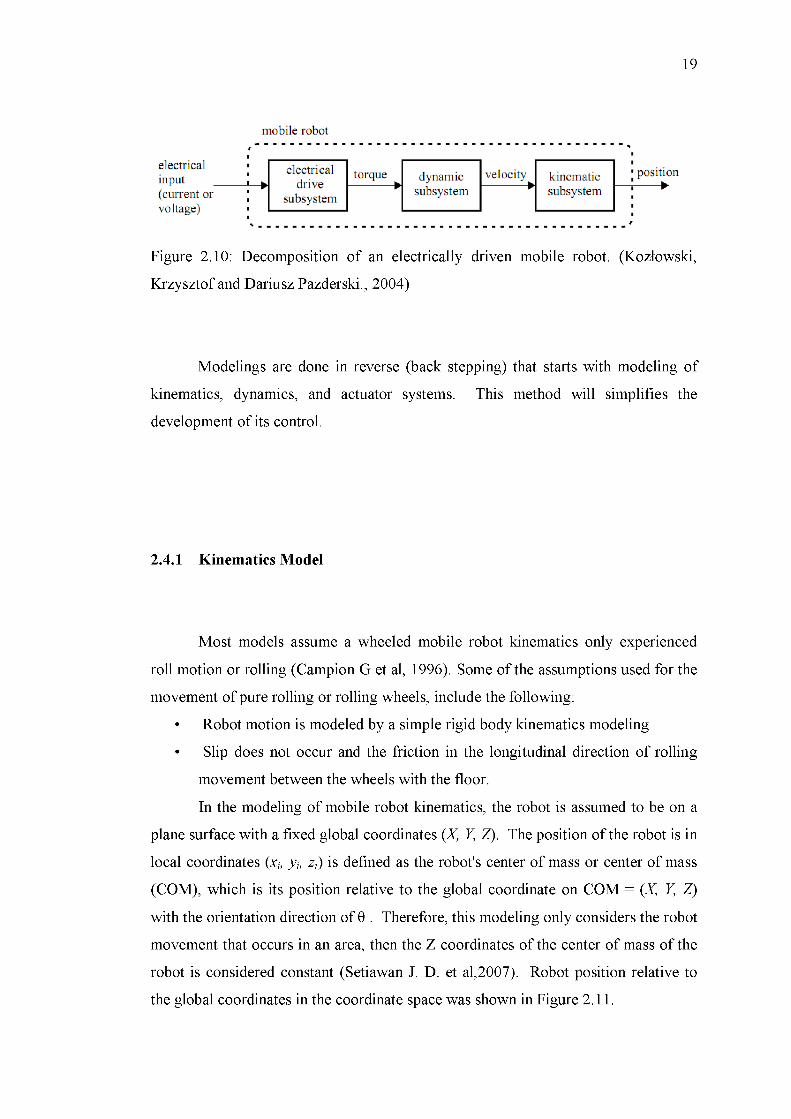
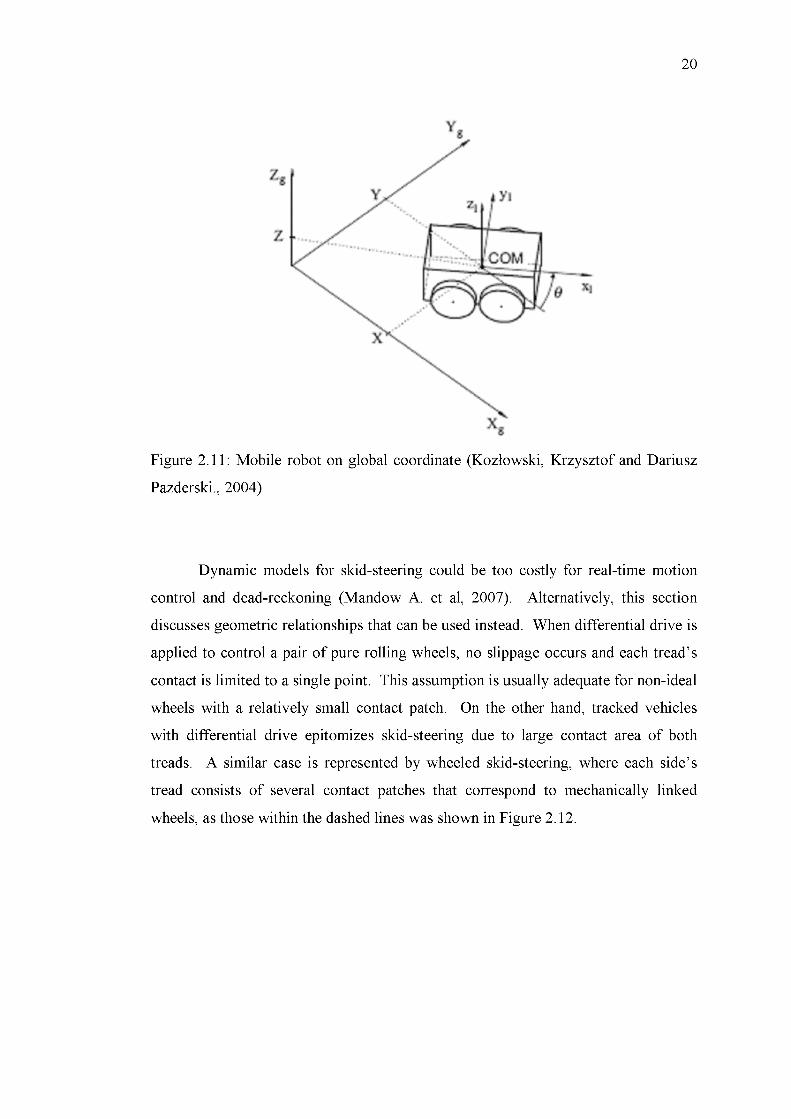
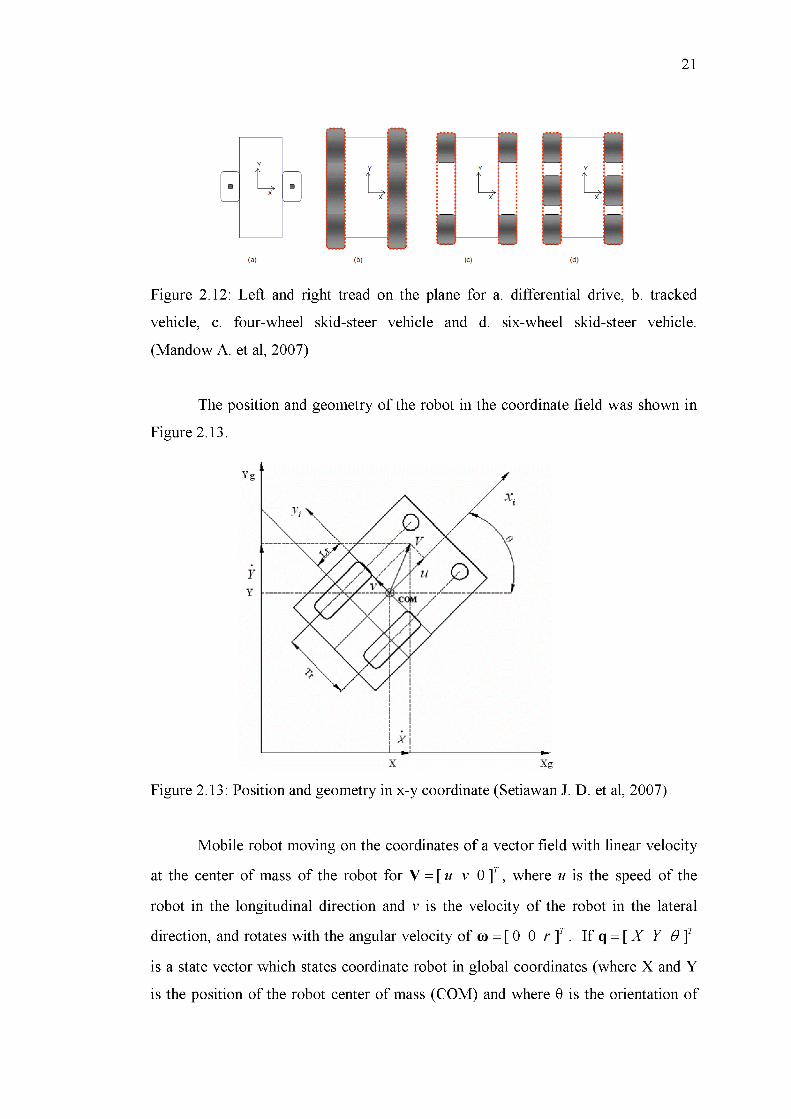
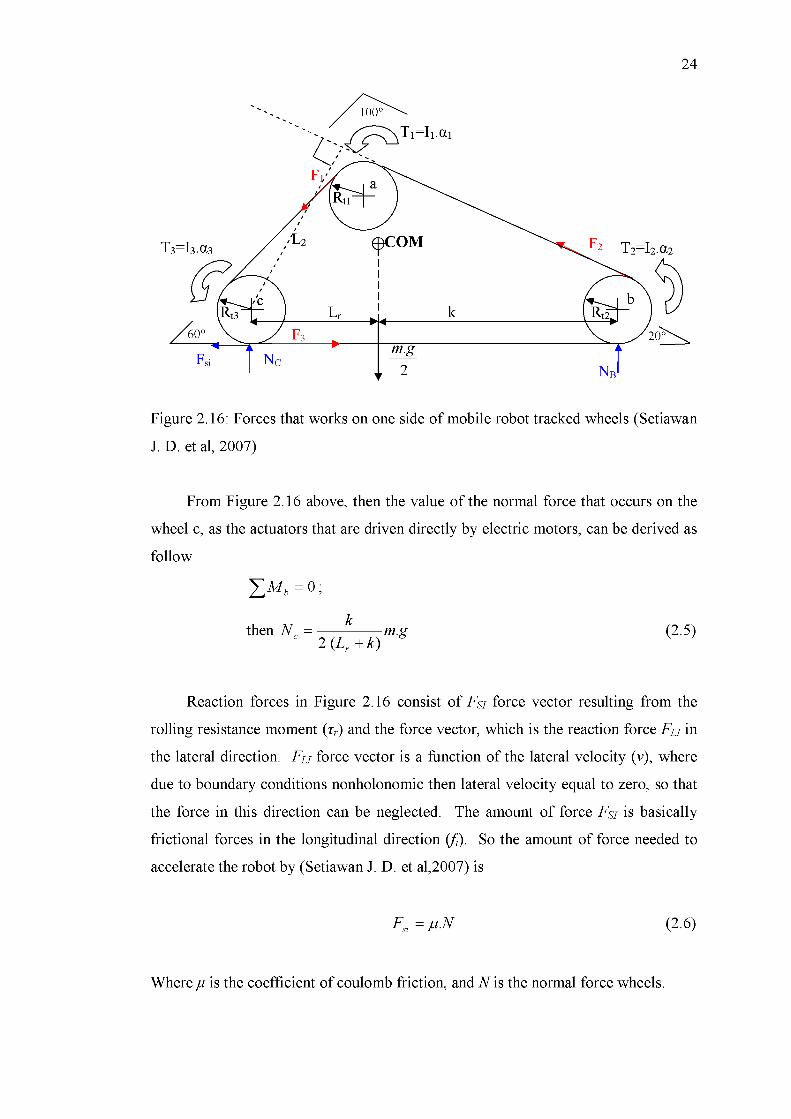
DEVELOPMENT OF SEMI-AUTONOMOUS MOBILE ROBOT HARDWARE-IN-THE-LOOP (HIL) SIMULATION FOR INDOOR MAPPING
L m BUD1 SAESAR
A thesis submitted
in fulfillment of the requirements for the award of the
Degree of Master of Mechanical Engineering
Faculty of Mechanical and Manufacturing Engineering
Universiti Tun Hussein Onn Malaysia
MAY 2012













![[ , ] Autonomous Human Robot Interactive Skills](https://img.pdfslide.us/doc/110x75/577cc35f1a28aba71195d883/-autonomous-human-robot-interactive-skills.jpg)















